
Plan Synthesis for Probabilistic Activity Recognition
Frank Kr
¨
uger, Kristina Yordanova, Albert Hein and Thomas Kirste
Mobile Multimedia Information Systems Group, University of Rostock, Rostock, Germany
Keywords:
Plan Synthesis, Activity Recognition, Probabilistic Reasoning, Causal Models.
Abstract:
We analyze the applicability of model-based approaches to the task of inferring activities in smart environ-
ments. We introduce a symbolic approach to representing human behavior that enables the use of prior knowl-
edge on the causality of human action and outline its probabilistic semantics. Based on an experimental
analysis of a real world scenario from the smart meeting room domain, we show that such a symbolic ap-
proach allows to build reusable behavior models that compete with data-driven models at the performance
level and that are able to track human behavior across a wide range of scenarios.
1 INTRODUCTION
Smart environments aim at assisting everyday activ-
ities by providing automatized responses to specific
situations. Everyday activities can often be regarded
as goal driven: they are performed in order to achieve
a specific objective (e.g., prepare a meal, conduct a
meeting). If a smart environment is able to estimate
the objective – the goal state – that is the underlying
cause for the activity, it can assist in achieving the de-
sired goal state. We use the term activity recognition
(AR) for the process of estimating a person’s action
sequence. One option for AR is to use plan recogni-
tion which analyzes whether observed activities can
be interpreted as prefix of a plan that is known to lead
to the goal in question.
Sensor observations are noisy and ambiguous, re-
quiring probabilistic plan recognition that uses infer-
ence techniques such as Bayesian filtering. Works
such as (Sadilek and Kautz, 2012) and (Hiatt et al.,
2011) show this approach to be viable. The param-
eters of probabilistic models are in general inferred
from training data. In smart environment settings, the
acquisition of training data is expensive: it requires
real-time observation of human behavior in natural
environments. In addition it is difficult to reuse train-
ing data across different instances of the same do-
main: location sensor data from a meeting room at
company A will not fit the spatial structure of a meet-
ing room at university B.
Plan recognition is based on explicit symbolic rep-
resentations of action sequences. These “plans” allow
to capture existing prior knowledge on the structure of
human behavior and its environment dependencies.
Plan recognition requires a library of plans to be
available. Setting up such a plan library can be a te-
dious task (Roy et al., 2011), as there may be numer-
ous action sequences achieving the same goal. How-
ever, works such as (Ramirez and Geffner, 2011) and
(Hein et al., 2009) show that plan libraries can be au-
tomatically synthesized by employing planning tech-
nology. Here, just the set of available actions has to
be provided. These actions are represented by pairs
of first order formulae, preconditions and effects, de-
scribing the causal semantics of action execution.
From the viewpoint of AR for smart environ-
ments, a plan synthesis approach is interesting for
three reasons: (1) it allows to use prior knowledge
on the causal structure of human actionsto reduce
the need for training data; (2) it provides a conve-
nient means for determining the goal state that the
acting person tries to achieve, enabling further state-
based deliberation of assistive actions; (3) it allows
for reusable models. A model definition is applicable
across scenarios as long as their initial state and their
goal state are representable in the model’s state space.
However, for the plan synthesis approach to be-
come a viable alternative to established data driven
approaches, it (i) needs to show that it is able to com-
pete with respect to recognition performance, and it
(ii) needs to show that the effort of translating prior
knowledge on human behavior into symbolic causal
models is worthwhile by proving that such models in-
deed can be reused across different scenarios. In this
paper we present an experimental study on whether
a plan synthesis approach to AR for smart environ-
ments applications is able to fulfill this requirement.
The further structure of this paper is as follows:
283
Krüger F., Yordanova K., Hein A. and Kirste T..
Plan Synthesis for Probabilistic Activity Recognition.
DOI: 10.5220/0004256002830288
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 283-288
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Sec. 2 discusses the current modeling concepts of in-
terest for synthesis-based AR. In Sec. 3, we outline an
enhanced modeling approach.The experimental set-
ting for evaluating the viability of this approach is de-
scribed in Sec. 4. Quantitative results are presented in
Sec. 5 and in Sec. 6 we present our final conclusions
based on the experiment.
2 PLAN SYNTHESIS
Activity recognition based on plan synthesis uses
a symbolic representation of available actions from
which possible plans (action sequences) are gener-
ated mechanically. This concept complements pro-
posals for AR, where plans and libraries of plans are
explicitly provided by human experts. An example
for the latter approach is (Roy et al., 2011), relying
on manually created ontology-based plan libraries.
These plans represent partially ordered sequences of
actions that must be carried out in order to achieve a
goal. Another such work is the Asbru plan representa-
tion language that can be used to write time-oriented,
intention-based, skeletal plan-specifications for clin-
ical guidelines (Kaiser and Miksch, 2004); Asbru is
able to represent the different subgoals of a plan as
a hierarchy of plans with different temporal relation-
ships for their execution. Library-based models are
inherently unable to solve the problem of library com-
pleteness stated in the introduction – however, they
may be important additions to a synthesis based ap-
proach, being able to convey knowledge on typical,
preferred, or normative courses of activities.
A second option for arriving at a suitable set of
plans is to mine action sequences from observations
of human behavior. Such an approach is proposed by
Storf et al. (Storf et al., 2009), using a rule-based
plan representation. Starting from an initial rule set
defined by a specialist, the system adds new rules to
its library during a training phase by observing the
user. Similarly, Okeyo et al. (Okeyo et al., 2011) use
an ontology based approach to manually define an ini-
tial library of behaviors. Afterwards, observations of
user activities are used to add behavior variations or
remove obsolete behaviors. While providing interest-
ing solutions to the problem of keeping plan libraries
up-to-date, both concepts rely on initial manual defi-
nitions of behavior. So here too we think that a train-
ing based approach complements a synthesis based
model rather than competing with it.
Regarding current approaches to plan synthesis,
there are two routes being investigated: the use of
cognitive models providing mechanisms for estimat-
ing human problem solving strategies based on a cog-
nitive theory, and the use of decision theoretic ap-
proaches based on a situation calculus model.
As an example for employing cognitive models,
(Hiatt et al., 2011) Hiatt et al. present an approach for
plan recognition based on the cognitive architecture
ACT-R, a sub-symbolic production system. It allows
the description of the possible actions in terms of pre-
conditions and effects, while the state of the world is
modeled as information chunks that can be retrieved
from the memory of the system. Every chunk has
an activation level, and when a retrieval request is re-
ceived matching more than one chunks, the one with
the highest activation level is selected. Note that this
action selection strategy is a heuristic model of human
action selection. Additionally, by introducing differ-
ent goals and initial world states, different behaviors
can be followed.
A decision theoretic approach is investigated by
Ramirez et al. (Ramirez and Geffner, 2011). The ob-
jective here is to identify the goal of an agent whose
action library is defined in a PDDL-like notation. The
idea is to consider the agent as solving a partially ob-
servable Markov decision problem (POMDP) for ac-
tion selection: the policy that solves the POMDP is
used to define the probability by which the agent se-
lects a specific action; the higher an actions reward in
a given state, the higher the probability that the agent
will choose this action. This approach is quite simi-
lar to the model of (Hiatt et al., 2011): the main dif-
ference being the heuristics used for approximating
human action selection policies.
We see that these approaches to plan synthesis ba-
sically use the same paradigm – precondition-effect
rules– relying just on different heuristics with respect
to modeling human action selection policies. Thus,
the viability of a plan-synthesis approach to AR can
be considered as proven by these investigations.
However, currently no investigations exist, that
show whether the plan-synthesis approach can be
used to define reusable models of activities. The
case studies in the above works have concentrated on
showing that symbolic models for specific scenarios
can be established; it has not been shown that such
models can be successfully reused across different
scenarios belonging to the same application domain.
In addition, the focus has been on single user sce-
narios (no interleaved actions by multiple indepen-
dently acting entities) that did not need to take ac-
tion durations into account. Furthermore, problems
of only limited state space size had been considered.
So there is the question if the plan synthesis approach
is able to measure up to the state space complexity of
realistic scenarios, where multiple persons interact in
time and space. In the next section, we outline an ex-
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
284

tended precondition-effect model for plan-synthesis
based AR that aims at integrating these requirements.
3 EXTENDED PLAN SYNTHESIS
This section introduces the core aspects of the exper-
imental system we have targeted in our experimental
evaluations. We do not aim at a mathematical rigor-
ous introduction of the modeling features of this sys-
tem, but focus on providing an understanding of the
feature set that has been available for evaluation.
Consider a state space X and an observation space
Y . Let y
1:t
be a sequence of observations where y
i
∈ Y
for i ∈ 1 . .t. The objective of Bayesian filtering is
to compute the posterior distribution p(x
t
|y
1:t
) that
gives the probability of being in a state x
t
∈ X after
having seen the observations y
1:t
. This computation is
based on three distributions defining the filtering task:
the observation model p(y|x) that describes the prob-
ability of observing an event given a certain state; the
transition model p(x
k+1
|x
k
) that describes the prob-
ability of ending up in state x
k+1
when the current
state is x
k
; and the prior distribution p(x), which de-
scribes how the states probability is distributed. If
a synthesis-based activity recognition system is able
to provide these three distributions, it can readily be
used for probabilistic activity recognition using the
Bayesian filtering framework.
Such plan synthesis system is based on a set of
actions A and a state space X, where actions a ∈ A are
defined by preconditions π
a
and effects ε
a
. An action
a is said to be applicable in a state x if π
a
is valid in x.
If an action is applied to a state x, the action’s effects
ε
a
are then valid in the new state x
0
= a(x).
As we have a probabilistic system, we also want
to model the probability that a person will select
action a in state x
k
, which is annotated as p(a |x
k
).
There are different ways to define p(a|x
k
). One
option is to use the goal distance δ(a(x
k
)). The
cost of achieving the goal from the state reached by
applying a to x
k
is defined by
p(a| x
k
) ∝ exp
−λ δ(a(x
k
))
a similar strategy has been used by (Ramirez and
Geffner, 2011). The λ-parameter models the impact
of the goal distance on action selection. In contrast
to this goal-driven heuristic, the ACT-R based ap-
proach by (Hiatt et al., 2011) focuses on situation-
driven, opportunistic heuristics that consider aspects
such as specificity and recency . As different heuris-
tics seem reasonable, we believe that a model of ac-
tion selection should provide for a combination of
heuristics.In our experiments we have used a combi-
nation of three features: goal distance, saliency, and
revisiting penalty (see below).
Based on these underlying considerations, we
have set up a tool for synthesis-based activity recogni-
tion that uses a PDDL-like language for defining the
set of actions for an inference domain and its state
space. The tool compiles scenario definitions consist-
ing of a domain file, a problem file, and an observation
definition into executables that compute the posterior
p(x
t
|y
1:t
) from observation data. Actions can be
attributed with :agent, :duration, and :saliency declara-
tions; domain definitions can be extended by :observa-
tion clauses.
An action’s :saliency value s(a) defines its
saliency feature. It is used in the action selection
model and allows to manually assign simple “prior-
ities” to actions. An action’s :agent value defines the
execution thread for this action, which may depend
on the action’s parameters. If more than one agent is
defined in a domain, the domain’s effective action al-
phabet is given by the cartesian product of the actions
of all agents. The :duration clause allows to declare
the distribution of the action duration p(∆
t
|a). With
respect to defining the observation model p(y |x), do-
main definition and observation densities are linked
via the :observation clause.
Translation of a complete model is rather straight-
forward: after parsing domain and problem file, the
object sets for all defined types are computed, the ac-
tions are grounded relative to these object sets, pre-
conditions and effects of actions are put into disjunc-
tive normal form, and finally some simplifications are
applied (a similar approach is used in (Bonet and
Geffner, 2005)). More detailed information about
the model semantics and the plan synthesis as well
as the inference mechanism could be found in (Kirste
and Kr
¨
uger, 2012)
In order to evaluate our synthesis-based activity
recognition system, in the next section we discuss the
experimental scenario we used in this work.
4 EXPERIMENTAL SETUP
Objective of the experimental setup is to investigate
whether reusable plan synthesis models can be cre-
ated for AR in “real world” domains. We have used
a “meeting” domain for this experiment: several per-
sons meet in a room to hold presentations and dis-
cussions. Objective of the system is to recognize the
sequence of activities that have taken place.
This setting involves several persons acting in par-
allel, requires the cooperation of persons, and con-
PlanSynthesisforProbabilisticActivityRecognition
285

tains temporal aspects. A reusable meeting model
should be able to reconstruct meetings with different
spatial and temporal topologies (different locations of
seats, whiteboards; different sequence and durations
of agenda items). Thus “meetings” pose basic chal-
lenges to the ability to handle interleaved durative ac-
tivities by multiple agents. At the same time, meet-
ings can be structured simple enough to allow for the
construction of a “classical” training-based recogni-
tion system, using simple timed Markov models.
Based on this general setting, the following in-
creasingly challenging hypotheses were to be tested:
• H
1
– The use of observation models based on
the geometric room layout is viable for the meeting
domain. The performance of those is competitive to
models learned from training data.
• H
2
– Using prior knowledge in place of training
data is valid. The accuracy of synthesis-based AR for
a specific scenario is not significantly different from
HMMs built from training data.
• H
3
– Using prior knowledge allows to build
reusable models. It is possible to create a general
model for detecting activities that is usable for differ-
ent scenarios of an application domain, while being
able to compete with training-based models.
• H
4
– Multi-agent modeling is viable. The mod-
eling of independent agents does not decrease the per-
formance of AR while at the same time provides ad-
ditional information on the state of activities.
The hypotheses H
1
and H
2
are tested on a data
set (data set D
1
) containing sensor data from twenty
sample meetings. These sample meetings have a sim-
ple structure: three persons A, B, and C meet in a
room, there are three presentations scheduled (one for
each person), and a final discussion. The presentation
durations for A, B, and C are 70, 100, and 50 sec.,
respectively, the final discussion is scheduled for 30
sec. (4 min total duration.). The seats and presen-
tation stages for the three persons have known loca-
tions. The twenty sample meetings contain different
sequences through the agenda; the recorded data are
the locations of A, B, and C tracked by a Ubisense
UWB location tracking system.
For hypothesis H
1
we created four different ob-
servation models, two of which are created from the
room layout (circle and rcircle) the other learned from
training data (gauss and mixture).
To prove hypothesis H
2
we have trained a timed
HMM on this meeting data corpus, and we have built
a minimal plan-synthesis model (4 actions, 6 ground
actions, 31 states). Both models were then applied to
the meeting data set, using the different duration and
location models.
For testing hypothesis H
3
an additional meeting
with a significantly changed temporal and spatial
structure has been recorded (data set D
2
). Here, the
presentation durations have been 16, 17, and 18 min.
(52 min. total duration). Obviously, the HMM built
for hypothesis (A) was not able to recognize the ac-
tion sequence of this meeting. For the plan synthesis
approach, we decided to build a multi-agent model
that should be able to recognize the action sequences
of both data sets.
For testing hypothesis H
4
the performance of the
minimal plan synthesis model was compared to that
of the multi-agent model using the dataset D
1
. The
reason for that is that the simple model describes the
single agents behaviour as emerging from the team
behaviour, while the multi-agent model describes the
team behaviour as emerging from the interactions of
the single agents.
In all, the following models have been build:
• HMM (Hidden Markov Model) – an HMM
(with 17 states) with transition probabilities and ob-
servations estimated from the training data in D
1
.
This model provides a basic “sanity check” for the
other models and serves as “baseline” for assessing
the accuracy achieved by the symbolic models.
• SCM (Single-threaded Causal Model) – a
single-threaded precondition-effect model of meeting
activities, where each model action represents a com-
pound action of all team members, as for the HMM.
(This model provides a basic “sanity check” for the
applicability of causal modeling to the domain)
• MCM (Multi-threaded Causal Model) – a multi-
threaded precondition-effect model, employing the
full descriptive and inferential capabilities of the sys-
tem outlined in Sec. 3
Note that all models are applied on each observa-
tion model and each timing mode.
5 RESULTS
The evaluation of the filtering performance is based
on the D
1
and D
2
meeting data sets as described in
Section 4. We compare the four observation models
circle, rcircle, gauss, and mixture and the two filtering
methods exact, where applicable, and approximate,
with respect to the three models (HMM, SCM, and
MCM). In the results below a label like “MCM
ap
(c)”
stands for the Multi-threaded Causal Model with cir-
cular observation model, gaussian duration model and
approximate filtering. Similarly rc stands for rcircle
observation model, g for gaussian observation model,
and mix for mixture. The abbreviation ex denotes
that exact filtering was applied. For all configurations
the forward filtering performance was determined.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
286
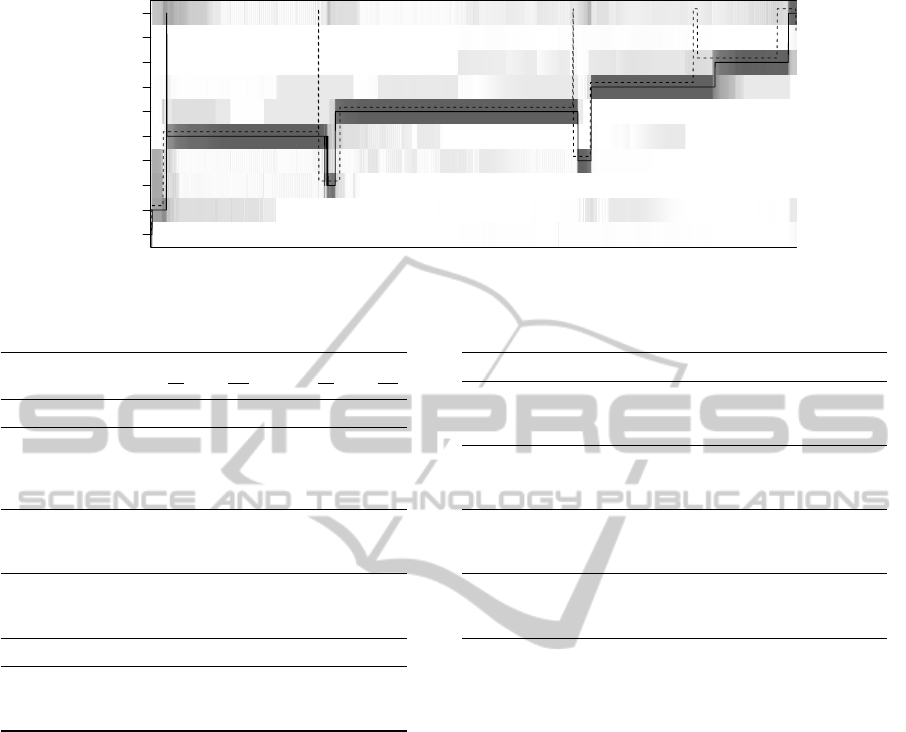
Enter
PrepareA
PrepareB
PrepareC
PresentA
PresentB
PresentC
Discuss
Exit
Unknown
Figure 1: Monte-Carlo approximation of the posterior distribution (p(x
t
|y
1:t
)) using 10000 particles of 50 runs. The dotted
line illustrates the ground truth whereas the solid line shows the estimated meeting action sequence.
Table 1: Performance for data sets D
1
and D
2
.
Team Level Agent Level
Model
f
acc acc
g
prec prec
f
acc acc
g
prec prec
Dataset D
1
1 HMM
ex
(c) .8964 .8943 .8892 .8814 - - - -
2 HMM
ex
(rc) .8887 .8852 .8612 .8640 - - - -
3 HMM
ex
(g) .8994 .8981 .8893 .8858 - - - -
4 HMM
ex
(mix) .9225 .9053 .9236 .9206 - - - -
5 SCM
ap
(c) .8969 .8939 .9067 .9039 - - - -
6 SCM
ap
(rc) .8871 .8855 .9014 .8976 - - - -
7 SCM
ap
(g) .9093 .8987 .9188 .9085 - - - -
8 MCM
ap
(c) .9115 .9020 .9019 .8940 .9435 .9400 .9505 .9501
9 MCM
ap
(rc) .8993 .8972 .8992 .8838 .9443 .9453 .9477 .9459
10 MCM
ap
(g) .9091 .9039 .9076 .9016 .9385 .9376 .9498 .9473
Dataset D
2
11 MCM
ap
(c) .9893 .9874 .9867 .9888 .9883 .9904
12 MCM
ap
(rc) .9861 .9884 .9853 .9881 .9890 .9905
13 MCM
ap
(g) .9767 .9725 .9841 .9840 .9822 .9819
For each of the 20 sample meetings D
1
and meet-
ing D
2
, respectively exact and approximate inference
runs were performed. In order to increase robustness
approximate results were computed by majority vote
from 50 independent particle filter runs using 10,000
particles. Figure 1 illustrates the posterior distribution
of all 50 runs and the estimated action sequence.
Table 1 summarizes the results of the different ex-
periments with respect to accuracy and precision. For
the runs on D
1
(Table 1), ˜x gives the median value of
the 20 results for the files in D
1
and ¯x the mean. For
the D
2
run the single value is reported. The columns
labelled “Agent Level” give the performance results
for individual agents using the multi-threaded model.
Pairwise comparisons of the accuracy of differ-
ent model configurations over 20 meetings together
with the Wilcoxon Matched-Pairs Signed-Ranks Test
statistics (W) and p-values are given in Table 2. The
p-value indicates whether the accuracies from both
models arise from the same distribution or differ sig-
nificantly (p-value < 0.05). The median of the differ-
ences as well as the difference of the median accura-
Table 2: Performance comparison of different models.
Model 1 Model 2
g
acc1
g
acc2 ∆
f
acc W p
g
∆acc
1 HMM
ex
(c) SCM
ap
(c) .8964 .8969 -.0005 107 .6435 .0015
2 HMM
ex
(g) SCM
ap
(g) .8994 .9093 -.0099 74 .2549 -.0034
3 HMM
ex
(rc) SCM
ap
(rc) .8887 .8871 .0015 106 .9851 -.0000
4 HMM
ex
(c) MCM
ap
(c) .8964 .9115 -.0151 58 .0826 -.0139
5 HMM
ex
(r) MCM
ap
(rc) .8887 .8993 -.0107 13 .0010 -.0125
6 HMM
ex
(g) MCM
ap
(g) .8994 .9091 -.0097 54 .0594 -.0075
7 SCM
ap
(c) MCM
ap
(c) .8969 .9115 -.0146 66 .1506 -.0141
8 SCM
ap
(rc) MCM
ap
(rc) .8871 .8993 -.0122 30 .0054 -.0135
9 SCM
ap
(g) MCM
ap
(g) .9093 .9091 .0002 61 .1044 -.0062
10 HMM
ex
(mix)MCM
ap
(c) .9225 .9115 .0110 124 .4898 .0112
11 HMM
ex
(mix)MCM
ap
(rc) .9225 .8993 .0231 132 .3225 .0196
12 HMM
ex
(mix)MCM
ap
(g) .9225 .9091 .0134 131 .3411 .0102
cies illustrate performance differences.
In order to prove hypothesis H
2
we compare the
performance of the different runs of the HMM and
the SCM. The comparison (row 1–3 in Table 2) show
that the recognition accuracy of both models does not
differ significantly and is about 89% in all cases. The
difference of the accuracies is about 0.1%. Modeling
multiple agents can increase the accuracy furthermore
(rows 4–6 of Table 2).
Rows 7–9 show that even the use of multiple
agents, which increases the state complexity at run-
time, does not decrease the recognition rate (Hypoth-
esis H
4
). Rows 11–13 and 8–10 in Table 1 prove
that a reusable model for the meeting domain can be
created, without decreasing the performance of the
recognition (Hypothesis H
3
).
Hypothesis H
1
, which allows the usage of obser-
vation models based on the room layout instead of
models learned from training data, can be shown to be
true. Rows 10–12 of Table 2 show a decrease of about
1% for the use of causal models together with obser-
vation models based on the room layout instead of
handcrafted HMM’s with observation models learned
from data.
The evaluation of the results show that the hy-
potheses (H
1
–H
4
) can be accepted, which means that
PlanSynthesisforProbabilisticActivityRecognition
287

the approach plan synthesis from causal models by
means of precondition and effect rules is competitive
with state of the art methods for AR.
6 DISCUSSION AND OUTLOOK
To summarize the experiments: the results showed
that using geometric observation models based on the
room topology instead of trained observation mod-
els, does not hinder the AR and is competitive to the
trained models. Even more, in the case of the gener-
ated models SCM and MCM combined with the ge-
ometric models, they outperformed the same causal
models combined with trained observation models.
This was observed in the experiments performed on
both datasets, thus supporting hypothesis H
1
.
Additionally, both scenario-specific and generic
synthesis-based models are able to achieve a perfor-
mance at a similar level as the trained model, pro-
vided that suitable observation and duration models
are used. Thus we consider hypothesis H
2
as sup-
ported. Furthermore, the generic multi-agent model
is able to correctly recognize not only dataset D
1
but also dataset D
2
and at a high performance level
(98.9% accuracy on the team level and 98.6% accu-
racy on the agent level), providing evidence for hy-
potheses H
3
. Finally, the data show that the use of
multi-agent modeling does not decrease performance,
but indeed is able to increase it, supporting hypothe-
ses H
4
. The multi-agent model allows to temporally
decouple state changes of agents, thus providing a fine
grained state estimation at the agent level. The data
show a solid performance of 94% (D
1
) resp. 98%
(D
2
) for this agent-level state estimation.
We thus conclude with the statement that plan-
synthesis approaches indeed allow the construction of
reusable models. Furthermore, our experiences show
approximate inference is feasible, enabling realistic
problem sizes and multi-agent interactions – however,
a successful application of these techniques beyond
short term activities requires the ability to support ap-
propriate duration models. Finally, the usage of train-
ing free observation models allows competitive to the
trained models inference performance.
As next step, we intend to show that the modeling
approach proposed here is also applicable to other do-
mains, such as recognizing activities of daily living.
While we believe this to cause no fundamental prob-
lem, we expect to gather new experiences on model-
ing methodology. As the approach uses the Bayesian
inference paradigm, adding additional inference tasks
from this paradigm, such as prediction and parameter
estimation, are, at least in principle, tasks for which
solutions exist. (We look forward to results of learn-
ing the weights of action selection features from data,
as this would provide empirical data on the weight of
heuristics in human action selection strategies.)
REFERENCES
Bonet, B. and Geffner, H. (2005). mGPT: A Probabilistic
Planner Based on Heuristic Search. J. Artif. Intell. Res.
(JAIR), 24:933–944.
Hein, A., Burghardt, C., Giersich, M., and Kirste, T.
(2009). Model-based Inference Techniques for detect-
ing High-Level Team Intentions. In Gottfried, B. and
Aghajan, H., editors, Behaviour Monitoring and In-
terpretation, volume 3. IOS Press.
Hiatt, L. M., Harrison, A. M., and Trafton, J. G. (2011).
Accommodating Human Variability in Human-Robot
Teams through Theory of Mind. In Proc 22nd Intl J
Conf on Artif. Intell. (IJCAI).
Kaiser, K. and Miksch, S. (2004). Treating Temporal Infor-
mation in Plan and Process Modeling. Technical Re-
port Asgaard-TR-2004-1, Institute of Software Tech-
nology and Interactive Systems, Vienna University of
Technology, Vienna.
Kirste, T. and Kr
¨
uger, F. (2012). CCBM-A tool for activ-
ity recognition using Computational Causal Behavior
Models. Technical Report CS-01-12, Institut f
¨
ur Infor-
matik, Universit
¨
at Rostock, Rostock, Germany. ISSN
0944-5900.
Okeyo, G., Chen, L., Wang, H., and Sterritt, R. (2011).
Ontology-Based Learning Framework for Activity
Assistance in an Adaptive Smart Home. In Chen, L.
et al., editors, Activity Recognition in Pervasive Intel-
ligent Environments, volume 4. Atlantis Press.
Ramirez, M. and Geffner, H. (2011). Goal Recognition over
POMDPs: Inferring the Intention of a POMDP Agent.
In Proc 22nd Intl J Conf on Artif. Intell. (IJCAI).
Roy, P. C. et al. (2011). A Possibilistic Approach for Ac-
tivity Recognition in Smart Homes for Cognitive As-
sistance to Alzheimer’s Patients. In Chen, L. et al.,
editors, Activity Recognition in Pervasive Intelligent
Environments, volume 4. Atlantis Press.
Sadilek, A. and Kautz, H. (2012). Location-Based Reason-
ing about Complex Multi-Agent Behavior. J. Artif.
Intell. Res. (JAIR), 43:87–133.
Storf, H., Becker, M., and Riedl, M. (2009). Rule-based ac-
tivity recognition framework: Challenges, technique
and learning. In Proc. 3rd Intl. Conf. on Pervasive
Computing Technologies for Healthcare.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
288
