
Supporting Mobile Robot’s Tasks through Qualitative Spatial Reasoning
Pascal Rost, Lothar Hotz and Stephanie von Riegen
HITeC e.V. c/o Fachbereich Informatik, Universität Hamburg, Hamburg, Germany
Keywords:
Qualitative Spatial Reasoning, Ontological Reasoning, Cognitive Robotics, Knowledge-based Systems
Applications.
Abstract:
In this paper, we present an application of qualitative spatial reasoning technologies for supporting mobile
robot tasks. While focusing on detection of interaction ability, we provide a combination of the spatial reason-
ing calculi RCC-8 and CDC as well as their integration with OWL-based ontologies. An architecture that uses
Prolog and complex-event processing implements our approach. We illustrate the results with a mobile robot
scenario in a restaurant.
1 INTRODUCTION
The focus of the research area cognitive robotics lies
on the usage of general logical representation and rea-
soning methods as well as finding appropriate tools
for manipulating and controlling robots in dynamic
and incompletely known worlds (Levesque and Lake-
meyer, 2007). Within this field, qualitative spatial rea-
soning enables the representation and reasoning about
spatial configurations like The cup is on the counter or
The robot is near the guest. Specifically the abstrac-
tion that is provided via qualitative representations
facilitate effective and concise representations about
the quantitative environment of robots. This supports
robot’s tasks like the ability to interact with the envi-
ronment. From a cognitive point of view, human per-
ception of the environment also uses qualitative con-
cepts, notions, relations, and recall interrelationships
preferably in a qualitative manor.
Qualitative spatial reasoning can be used to ex-
plicitly represent spatial interrelations of regions
and/or objects. The practical use of this kind of rea-
soning and representation methods, especially for au-
tonomous mobile robots in an appropriate domain, is
an ongoing research topic, notably if all spatial di-
mensions (i.e. topology, orientation, and distance)
are to be considered (Renz and Nebel, 2007). Typ-
ically used spatial calculi tend to focus on one di-
mension (e.g. Region Connection Calculus (RCC)
(Randell et al., 1992) on topology and Cardinal Direc-
tion Calculus (CDC) (Goyal, 2000; Skiadopoulos and
Koubarakis, 2004) on orientation). Thus, the combi-
nation of qualitative spatial calculi of different dimen-
sions is necessary.
Ontologies can be used for representing the
knowledge of the robot about objects and the envi-
ronment. This allows domain knowledge (like ob-
jects and environment details) and application knowl-
edge (i.e. activities, like serving a meal to a guest
in a restaurant scenario) to be made explicit to the
robot. However, the combination and enhancement of
ontological reasoning with qualitative spatial reason-
ing is a difficult task. Recent publications show that
the combination of these two reasoning and represen-
tation methods is coupled with losing the ability to
reason about spatial knowledge and revealing incon-
sistencies or to forfeit the decidability of ontological
reasoning (Katz and Grau, 2005; Hogenboom et al.,
2010a; Hogenboom et al., 2010b).
Hence, in this paper, we present a case study in
which we perform a combination of two qualitative
spatial calculi, i.e. Region Connection Calculus and
Cardinal Direction Calculus, with ontological repre-
sentations in a mobile robot scenario. We start with
the introduction of a concrete scenario in a restau-
rant environment, from which we extract technolog-
ical requirements that are needed by a robot fulfilling
specific tasks (Section 2). Then, we continue to pro-
vide a brief overview of applied representation tech-
niques, RCC, CDC, and ontological reasoning (Sec-
tion 3). In Section 4, we present our integrated ap-
proach that is evaluated by an implemented system
using Prolog (Wielemaker, J. et al., 2012), complex
event processing (Anicic et al., 2010), and the Web
Ontology Language OWL (Antoniou and Harmelen,
2003) (see Section 5). We close with a discussion
394
Rost P., Hotz L. and von Riegen S..
Supporting Mobile Robot’s Tasks through Qualitative Spatial Reasoning.
DOI: 10.5220/0004121803940399
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 394-399
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
(Section 6) and a summary in Section 7.
2 APPLICATION AREA AND
REQUIREMENTS
A versatile environment for demonstrating various
knowledge representation and reasoning techniques
for service robot tasks is the restaurant environment.
In this particular domain, it is required to represent
domain-specific objects, concepts, and rooms appro-
priately. Objects may be in use by guests or the robot
for certain reasons and can have (spatial and tempo-
ral) impacts on the environment. They might also
have hierarchical, temporal or spatial relations to each
other. Terminological knowledge is needed to distin-
guish dishes, drinks, meals etc. and their uses from
one another as well as to differentiate between areas
which may contain food products and seating areas.
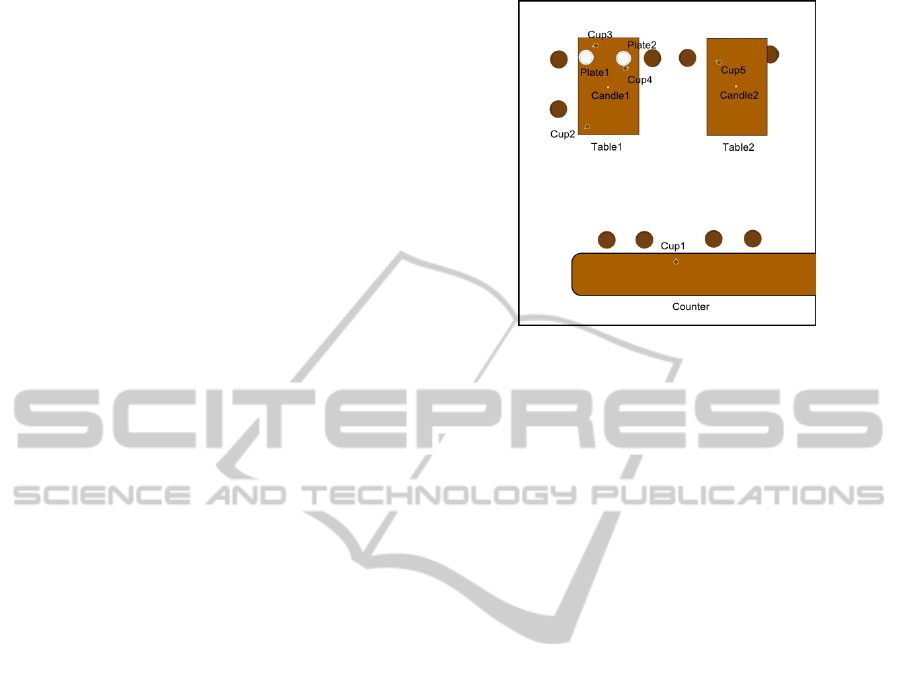
In our experiments, we investigate a fictional restau-
rant layout as presented in Figure 1.
The concrete use cases considered in this paper
are typical waiter’s tasks like serving a beverage or
clearing a table. One specific task for example reads
as follows: “a robot shall take a cup from a counter
and carry it to a guest sitting at a table. The cup shall
be positioned in front of the guest and the robot shall
go back to the counter”.
In the following, some of the requirements are
listed that have to be fulfilled for processing the above
mentioned and likewise scenarios:
• The robot shall infer, if an own position is practi-
cal for placing a cup on the counter, i.e. to infer
whether the actual position is practical to interact
with a target object or not (interaction ability).
• The robot shall identify an ideal path to a table, i.e.
using the spatial configuration of the environment;
the robot shall infer, if a certain place is reachable
and how the path looks like (global path-finding).
We focus on interaction ability and derive the
following technical requirements from the domain-
specific requirements, in this paper:
Knowledge Representation: Representation of do-
main and state knowledge with integration of
qualitative spatial calculi.
Consistency: Identifying inconsistencies in the
knowledge base and providing facts of a certain
situation, especially of spatial relationships.
Computation of Spatial Relationships: Inferring
unknown spatial relationships from known facts.
Figure 1: Detailed view of a fictional restaurant environ-
ment equipped with counter, tables, cups, etc.
3 BACKGROUND
The basic techniques we combine in our approach are
qualitative spatial reasoning introduced in Section 3.1
and ontological reasoning introduced in Section 3.2.
3.1 Qualitative Spatial Reasoning
Spatial calculi allow to represent relations between
objects with finite sets of binary relations. Algorithms
can be applied to those representations to derive new
knowledge and check if a provided knowledge base
is consistent. RCC enables reasoning about topo-
logical properties of (abstract) regions. Especially
RCC-8 provides eight spatial relations disconnected
(DC), externally connected (EC), tangential proper
part (TPP), non-tangential proper part (NTPP), par-
tially overlapping (PO), equal (EQ), and the inverses
T PP
i
and NT PP
i
.
The Cardinal Direction Calculus (CDC) enables
reasoning about relative orientation between objects
by using the eight cardinal points (N, NE, E, SE, S,
SW, W, NW) as well as one further relation for repre-
senting direct neighborhood (i.e. bounding box, B).
The basic inference mechanism when using qual-
itative spatial calculi is based on the composition
operator ◦. Let D be a set of regions and R
1
, R
2
,
R
3
relations of the qualitative calculus: R
1
◦ R
2
=
{ (x R
3
z) | ∃y ∈ D : ((x R
1
y) ∧ (y R
2
z))}. Thus, a
composition operator computes the relations between
two regions x and z on the basis of a further region y
which is related to x and z. A composition table for a
certain calculus can be used to look up precomputed
(or manually resolved) results of all possible compo-
sitions (see (Li and Ying, 2003)).
SupportingMobileRobot'sTasksthroughQualitativeSpatialReasoning
395

For consistency computation, we map regions and
relations to a constraint net. A path-consistency algo-
rithms used for solving constraint satisfaction prob-
lems (Tsang, 1993) provides inference services like
identifying inconsistency (i.e. if no relation can be
computed between two regions) or restricting rela-
tions between regions to the only possible ones.
3.2 Ontological Reasoning
Ontological languages like OWL make it possible to
represent knowledge about objects, activities, rela-
tions etc. of a domain. Due to the formal repre-
sentation such ontologies provide, they are exchange-
able and, more importantly, can be used for inference
services. Description Logic reasoners (DL reasoner)
provide means for inference services like classifica-
tion or instance checking (McGuinness, 2003). Ca-
pabilities for representation involve the separation of
instances (representing individual objects) and con-
cepts (as set of instances), taxonomic relations be-
tween concepts, and properties as an additional type
of relation among concepts. A TBox contains all con-
cepts whereas an ABox contains all instances.
However, the combination of OWL and qualitative
calculi is not straight forward. While some theoreti-
cal foundations for translating RCC-8 to OWL exist
(see (Grütter and Scharrenbach, 2009; Katz and Grau,
2005; Hogenboom et al., 2010a)) as well as some im-
plementations that include RCC-8 in a DL reasoner
(see (Stocker and Sirin, 2009)), we would like to use
both RCC-8 and CDC (for topology and orientation)
in a most enclosed fashion. Thus, this paper provides
an approach for integrating OWL, RCC-8, and CDC.
4 CONCEPTUAL APPROACH
For applying qualitative spatial reasoning in a mobile
robot environment as presented in Section 2, we de-
veloped the following approach.
4.1 Ontological Reasoning
To represent the domain knowledge, we use a TBox
with classes occurring in the environment (like cup,
plate, table, room etc.). An ABox is used to rep-
resent instances of concrete individual objects (like
table1, counter1 etc. (see Figure 1)). As object prop-
erties of OWL follow the same semantics as binary
relations, they can be used for representing qualita-
tive relations of the calculi. Thus, in the ABox an
Ob jectPropertyAssertion establishes a property (re-
lation) between two individuals. A fact like "The cup
is on the table, protrudes the table edge or touches the
edge or is completely on the table" will be expressed
as (Cup1, PO, TPP, NTPP, Table1), or the fact "The
table is north of the counter and east of the chair" may
be noted as (Table1 N Counter1, Table1 E Chair1)
(see Listing 1).
Listing 1: RCC-8 and CDC relations as properties of in-
stances.
Ob j ec t Pr o pe r ty A ss e rt i on (: PO : C u p 1 : T a b l e 1 )
Ob j ec t Pr o pe r ty A ss e rt i on (: TP P : Cup1 : Ta b l e1 )
Ob j ec t Pr o pe r ty A ss e rt i on (: NT P P : C up1 : Tab l e 1 )
Ob j ec t Pr o pe r ty A ss e rt i on (: N : T able1 : C o u n ter 1 )
Ob j ec t Pr o pe r ty A ss e rt i on (: E : T able1 : C h a i r 1 )
For computing the consistency of the provided
facts as well as the computation of all spatial rela-
tionships between objects in the environment, we use
the introduced calculi RCC-8 and CDC. We utilize
the machine readability as basic property of OWL to
automatically access ABox instances of the ontology.
Once we extracted the object instances and their re-
lations from the ABox we import them into a con-
straint system which uses the composition tables of
the calculi to achieve the mentioned inference tasks.
The constraint system uses the path-consistency al-
gorithm for making implicit spatial relations between
domain objects (instances) explicit. Newly found re-
lations may afterwards be imported into the ABox.
Thus, we combine the ontology with a qualitative spa-
tial constraint system instead of including spatial cal-
culi in a DL reasoner directly (this approach is similar
to Pellet-Spatial, see also (Bhatt et al., 2009)), how-
ever, with two calculi.
4.2 Interaction Ability
To detect the robot’s interaction ability, i.e. whether
the robot is able to interact with a given object at a
specific time or not, following subtasks need to be
performed:
1. The robot has to identify, if its tools, which will
be used for interaction, are in the direction of the
target object.
2. The robot has to check, if the target object can
be manipulated from the robot’s position and the
orientation of its tools.
3. The robot has to check, if the distance between
itself and the target object is appropriate for inter-
action.
4. The robot has to ensure that no hindering object is
in-between it and the target object.
Using the CDC one can find cardinal points but
not the orientation. To be able to represent and exam-
ine the orientation of different agents and/or objects to
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
396

one another, we introduce a further instance that may
be inserted into the fact base representing the orien-
tation of the robot or any other object. One exam-
ple would be, if the orientation of the robot is north,
the direction would be represented by (Orientation N
Robot) whereas Orientation would be the artificially
added instance of the fact base. This allows not only
to fulfill the first but also the second subtask: If the
robot’s orientation is equal to the inverse orientation
of the target object, one can assume that the needed
orientation for the interaction of the robot with the
target object is achieved.
To fulfill the third subtask, the computation of dis-
tance between the robot and the target object, quan-
titative spatial relations, which are not provided by
RCC-8 or CDC, are needed. However, for using these
calculi a mapping from quantitative acquired posi-
tions to qualitative relations will always be done be-
forehand. Otherwise, some of the RCC-8 relations
can not be applied between objects. For clarifica-
tion, if two objects are near to one another, a com-
putation step is needed that applies either the relation
EC or DC between these objects, dependent of the
actual quantitative distance. This implies that the spa-
tial configuration of real world objects with RCC-8
relations inherently contains distance information. If
regions touch (EC), overlap (PO), or are contained in
the region of the robot (NT PP, T PP), the robot and a
target object are typically near enough to interact.
Considering obstacles as well, the previously
computed orientation and the inherent distance (CDC
and RCC-8 relations) can be used. Seen from the
topological angle, an object can only be between two
other objects, if the corresponding region of the object
is connected with the other two regions. Thus, using
RCC-8 one considers the robot’s region, the target ob-
ject’s region, and the region of a potentially obstacle
O. If O’s region is related to the other two regions
with the relation PO, NT PP, or T PP one can assume
that O is really an obstacle. With CDC an object O
might be an obstacle if, considered from the target
object, it is in the same direction like the robot is and,
considered from the robot, O is in the same direction
as the target object. For example, if the robot is east
of the target object (Robot E Target) (thus, also holds
(Target W Robot)), then an object that is also east of
the target and west of the robot might be in-between,
thus, might be an obstacle. However, such inference
might not be correct, because the calculi only consid-
ers two dimensions or the robot might find a plan for
grasping the target although an object is in-between.
In summary, it is possible to evaluate the interaction
ability with spatial qualitative relations, although it
might be uncertain.
5 EVALUATION OF THE
APPROACH
For the evaluation of our conceptual approach, an
architecture was implemented that combines the
needed inference technologies. As underlying sys-
tem serves the Event Transaction Logic Inference
System (ETALIS) (Anicic, D. and Fodor, P., 2011),
that implements a complex event processing (CEP)
framework on the basis of Prolog. Event process-
ing enables the processing of continuous data streams,
which in our case are created through the sensors of
a robot. The use of Prolog allows not only the gen-
eration of complex events from simple events (like
it is possible with traditional CEP systems) but also
to make strong logically rooted conclusions and in-
ferences about the events, their context, or other for-
mulated predicates. In comparison to other CEP-
systems, which are implemented with procedural or
object-oriented languages, ETALIS is more flexible
and has partially better performance results (Anicic
et al., 2010). Starting with ETALIS, we combine
it with the PROLOG-OWL interface THEA2 (Vas-
siliadis, V. and Mungall, C., 2012), and DL reason-
ers (like Pellet (Clark and Parsia, LLC, 2011), Racer
(Racer Systems GmbH Co. KG, 2011), or HermiT
(Motik, B. and Shearer, R. and Glimm, B. and Stoi-
los, G. and Horrocks, I., 2011)) to our system called
ETALIS-Spatial.
The knowledge representation of our system is re-
alized with an OWL2 knowledge base. Objects and
spatial relations are defined as described in Section 3.
THEA2 enables access to the ABox for extracting and
including spatial relations and all instances for partic-
ipating objects.
Processing with ETALIS-Spatial starts from sen-
sor data, which is assumed to be already mapped
from quantitative values to qualitative values. The
input consists of identified objects and their direct
spatial relations. This preprocessing could also be
done in principal by the Prolog engine. Typical ex-
amples for input data (primitive events) are asser-
tobject(Plate1) for an recognized object, assertRela-
tion(Plate1, Plate2, DC) for establishing a spatial re-
lation, robotMoved, for a finalized movement of the
robot. A robotMoved event triggers the new com-
putation of spatial relations between the robot and
other objects. Such input is continuously streamed
into the system. After asserting a bunch of new data
the system starts a consistency test of the knowledge
base and furthermore infers new relations if possible
(marked e.g. as foundRelation(Plate2, Cup4, EC)).
Complex events represent the output of this computa-
tion, e.g. interactable(Plate2) for indicating that the
SupportingMobileRobot'sTasksthroughQualitativeSpatialReasoning
397

system detected an object with which the robot can
interact. These complex events can be used like prim-
itive events for further computations.
The system was tested with a scenario depicted in
Figure 1. In it, the system computes the interaction
ability of the robot with Plate2 from different posi-
tions resulting out of two different paths (see figure 2).
If the robot approaches Plate2 from south-east (solid
path), it computes that an interaction with Plate2 is
not possible because Cup4 is an obstacle. If the robot
approaches Plate2 from north (dotted path), it com-
putes that an interaction with Plate2 is possible be-
cause no other object hinders the interaction.
Figure 2: Path of the robot; dotted path A, solid path B.
In summary, the evaluation shows an implemen-
tation of our conceptual approach presented in Sec-
tion 4. The qualitative spatial relations can be rep-
resented in an ontology as properties. The knowledge
can be extracted from the ontology for processing in a
separate spatial Prolog-based reasoner. This reasoner
computes all spatial relations and detects interaction
ability between the objects. By using complex event
processing, a continuous stream of data could be pro-
cessed.
6 DISCUSSION
Our work shows that typical robot tasks can be sup-
ported by applying qualitative spatial reasoning. We
applied RCC-8 and CDC to cover topology and ori-
entation aspects of spatial reasoning. Relations of
these calculi could be integrated in an OWL-based
ontology for maintaining the needed knowledge cen-
trally. Computing new spatial relations and consis-
tency checks were performed by a Prolog system
based on composition tables provided by the calculi
in combination with path-consistency algorithms.
A first implementation used the CEP-framework
ETALIS and enhances it to ETALIS-Spatial. We im-
plemented an ontology representing parts of a restau-
rant. In principle, such an ontology can be enhanced
for cover more facets of the tasks. Further or other
qualitative calculi which handle other aspects can be
integrated into the system by modeling their compo-
sition tables and relations in Prolog.
7 CONCLUSIONS
This paper demonstrates the application of the quali-
tative spatial calculi RCC-8 and CDC for robot tasks.
The approach combines these calculi with ontological
reasoning by modeling the relations in OWL but com-
puting spatial inferences with logical programming.
Thus, consistency checking and computation of new
spatial relations could be performed. An extension
of the complex event processing framework ETALIS
implements our approach. We demonstrate it’s use in
a restaurant scenario and could show how qualitative
spatial reasoning can support tasks of mobile robots.
ACKNOWLEDGEMENTS
This work is supported by the RACE project, grant
agreement no. 287752, funded by the EC Seventh
Framework Program theme FP7-ICT-2011-7.
REFERENCES
Anicic, D., Fodor, P., Rudolph, S., Stühmer, R., Stojanovic,
N., and Studer, R. (2010). A Rule-Based Language for
Complex Event Processing and Reasoning. In Hitzler,
P. and Lukasiewicz, T., editors, Web Reasoning and
Rule Systems, volume 6333 of Lecture Notes in Com-
puter Science, pages 42–57. Springer Berlin / Heidel-
berg.
Antoniou, G. and Harmelen, F. V. (2003). Web Ontology
Language: OWL. In Handbook on Ontologies in In-
formation Systems, pages 67–92. Springer.
Bhatt, M., Dylla, F., and Hois, J. (2009). Spatio-
terminological inference for the design of ambient en-
vironments. In COSIT, pages 371–391.
Motik, B. and Shearer, R. and Glimm, B. and Stoilos, G.
and Horrocks, I. (2011). Hermit OWL Reasoner.
http://hermit-reasoner.com/. Date: March, 6th 2012.
Clark and Parsia, LLC (2011). Pellet: OWL 2 Reasoner for
Java. http://clarkparsia.com/pellet. Date: March, 1st
2012.
Anicic, D. and Fodor, P. (2011). etalis - Event-
driven Transaction Logic Inference System.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
398

http://code.google.com/p/etalis/. Date: February,
25th 2012.
Goyal, R. K. (2000). Similarity assessment for cardinal di-
rections between extended spatial objects. PhD thesis,
The University of Maine. AAI9972143.
Grütter, R. and Scharrenbach, T. (2009). A qualitative ap-
proach to vague spatio-thematic query processing. In
Terra Cognita (Terra2009).
Hogenboom, F., Borgman, B., Frasincar, F., and Kaymak,
U. (2010a). Spatial knowledge representation on the
semantic web. In Semantic Computing (ICSC), 2010
IEEE Fourth International Conference on, pages 252
–259.
Hogenboom, F., Frasincar, F., and Kaymak, U. (2010b). A
review of approaches for representing rcc8 in owl. In
Proceedings of the 2010 ACM Symposium on Applied
Computing, SAC ’10, pages 1444–1445, New York,
NY, USA. ACM.
Wielemaker, J. et al. (2012). SWI-Prolog - a comprehensive
Free Software Prolog environment. http://www.swi-
prolog.org/. Stand: 8. März 2012.
Katz, Y. and Grau, B. C. (2005). Representing qualitative
spatial information in owl-dl. In Proceedings of the
OWL: Experiences and Directions Workshop. Galway.
Levesque, H. and Lakemeyer, G. (2007). Cognitive
Robotics. In van Harmelen, F., Lifschitz, V., and
Porter, B., editors, Handbook of Knowledge Represen-
tation. Elsevier.
Li, S. and Ying, M. (2003). Region connection calculus: Its
models and composition table. Artificial Intelligence,
145(1
˝
U2):121 – 146.
McGuinness, D. L. (2003). Configuration. In Baader,
F., Calvanese, D., McGuinness, D. L., Nardi, D.,
and Patel-Schneider, P. F., editors, Description Logic
Handbook, pages 397–413. Cambridge University
Press.
Racer Systems GmbH Co. KG (2011). RacerPro, der OWL
Reasoner und Inference Server für das Semantic Web.
http://www.racer-systems.com/. Stand: 8. März 2012.
Randell, D. A., Cui, Z., and Cohn, A. G. (1992). A spa-
tial logic based on regions and connection. In PRO-
CEEDINGS 3RD INTERNATIONAL CONFERENCE
ON KNOWLEDGE REPRESENTATION AND REA-
SONING.
Renz, J. and Nebel, B. (2007). Qualitative spatial rea-
soning using constraint calculi. In Aiello, M., Pratt-
Hartmann, I., and van Benthem, J., editors, Handbook
of Spatial Logics, pages 161–215. Springer.
Skiadopoulos, S. and Koubarakis, M. (2004). Composing
cardinal direction relations. Artif. Intell., 152:143–
171.
Stocker, M. and Sirin, E. (2009). Pelletspatial: A hybrid
rcc-8 and rdf/owl reasoning and query engine.
Tsang, E. (1993). Foundations of Constraint Satisfaction.
Academic Press, London, San Diego, New York.
Vassiliadis, V. and Mungall, C. (2012). A toolbox
for Qualitative Spatial Reasoning in applications.
http://www.semanticweb.gr/thea/index.html. Date:
March, 10th 2012.
SupportingMobileRobot'sTasksthroughQualitativeSpatialReasoning
399
