
SUPERVISED LEARNING FOR AGENT POSITIONING BY USING
SELF-ORGANIZING MAP
Kazuma Moriyasu, Takeshi Yoshikawa and Hidetoshi Nonaka
Graduate School of Information and Technology, Hokkaido University, Sapporo 060 0814, Japan
Keywords:
Supervised learning, Self-organizing map, Multi-agent.
Abstract:
We propose a multi-agent cooperative method that helps each agent to cope with partial observation and
reduces the number of teaching data. It learns cooperative actions between agents by using the Self-Organizing
Map as supervised learning. Input Vectors of the Self-Organizing Map are the data that reflects the operator’s
intention. We show that our proposed method can acquire cooperative actions between agents and reduce the
number of teaching data by two evaluation experiments using the pursuit problem that is one of multi-agent
system.
1 INTRODUCTION
Recently, multi-agent system is one challenge in the
field of artificial intelligence. Autonomous position-
ing is one of main topics of multi-agent system. There
are some problems to achieve the optimal positioning,
for example, the perceptual aliasing problem and the
concurrent learning problem. To solve such problems
of multi-agent system, it will be effective to adopt re-
inforcement learning. But it demands a large num-
ber of trials in the early stage, because it is the ap-
proach acquiring knowledge of achieving the goal by
trial and error. As another approach, it will be effec-
tive to adopt supervised learning based on operator’s
intuitive teaching (Akiyama and Noda, 2008). But it
is difficult to give desirable actions and position of
each agent for any state beforehand in the multi-agent
environment where there are many agents and states.
The larger the number of training data is, the more
desirable results we can get. However, it is desirable
that the number of training data is fewer for reducing
the operator’s work.
In this paper, we propose a multi-agent cooper-
ative method where each agent can cope with par-
tial observation. It can interpolate between teaching
data and reduce the number of teaching data by using
the Self-Organizing Map as supervised learning. The
teaching data is made by adding operator’s intuitive
teaching that is each hunter agent’s x, y-desirable co-
ordinate to x, y-coordinate data of all agents and helps
each hunter agent to act cooperatively. For evaluating
our proposed method, we did two evaluation exper-
iments using the pursuit problem. By the result of ex-
periments, we show that our proposed method is ef-
fective for reduction of the number of teaching data
and acquiring cooperative actions between agents in
the partially observable environment.
2 PURSUIT PROBLEM
In our study, we take up the pursuit problem (Ono and
Fukumoto, 1997) as a task of multi-agent system that
cooperative actions between agents involve compli-
cated processes. Many researchers have treated the
pursuit problem as a benchmark problem of multi-
agent reinforcement learning. In this paper, we con-
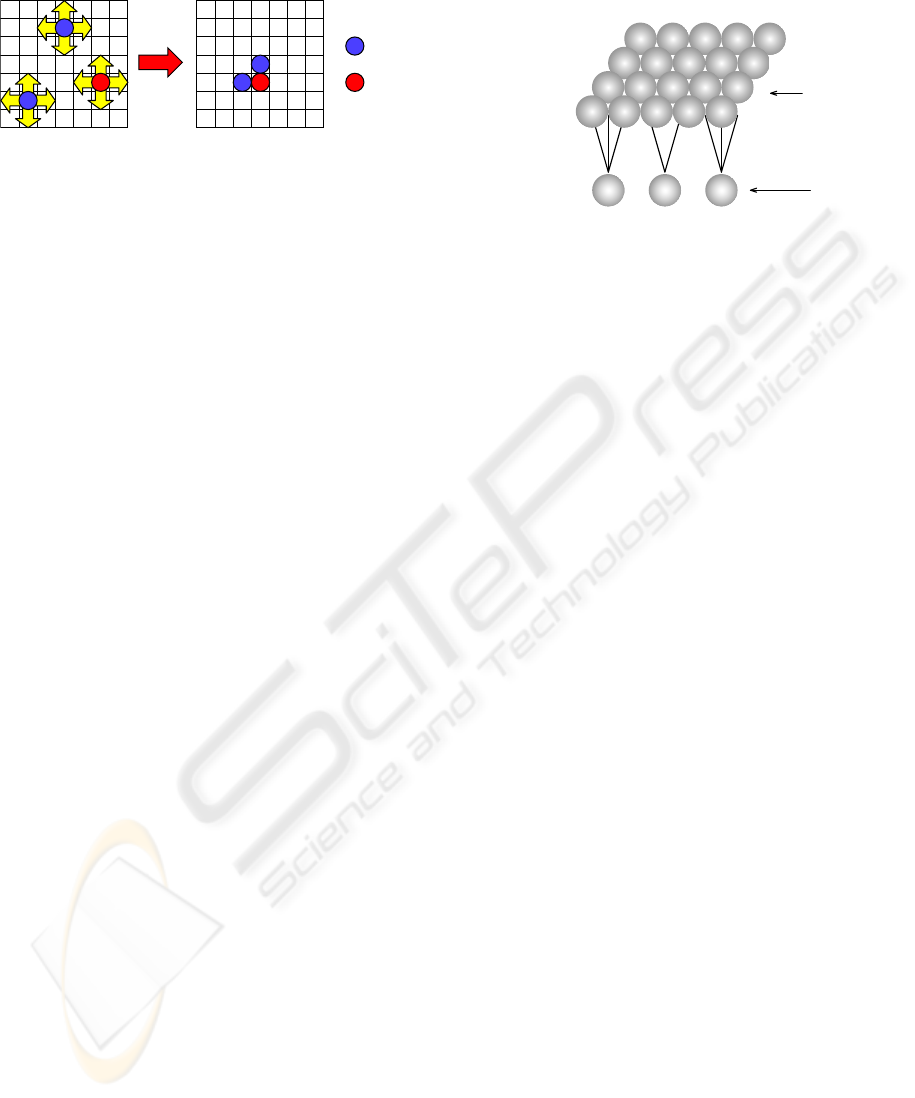
sider the pursuit problem defined as follows: In an
n× n non-toroidal grid world, a single prey agent and
m hunter agents are placed randomly,as shown in Fig-
ure 1(a). The purpose of m hunter agents that we con-
trol is surrounding the prey agent by all hunter agents
(Figure 1(b)). The neighboring positions are four di-
rections (up, down, right, and left) except four cor-
ners. At every step, each agent selects an action. We
call surrounding the prey agent by all hunter agents
from the state of random initial position an episode.
Each hunter agent moves to one of four directions
(up, down, right, and left) only a square, or alterna-
tively remains at the current position as the action.
The prey agent selects among these actions randomly
every step. It is prohibited for each agent to come
in the same grid. The limited visual field of each
hunter agent is l×l that the center is the current hunter
368
Moriyasu K., Yoshikawa T. and Nonaka H. (2010).
SUPERVISED LEARNING FOR AGENT POSITIONING BY USING SELF-ORGANIZING MAP.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
368-372
DOI: 10.5220/0003018603680372
Copyright
c
SciTePress
agent’s position.
P
H
H
H
P
H
H
P
(a) Start State
(b) Goal State
: Hunter
: Prey
Figure 1: Pursuit problem.
3 PROPOSED METHOD
3.1 Summary
We propose Supervised Learning for Agent Posi-
tioning by Using Self-Organizing Map (SLAPSOM),
which is a supervised learning method using the data
that the operator adds his/her intuitive teaching to
x, y-coordinate data of all agents as input vectors of
the Self-Organizing Map. SLAPSOM helps each
hunter agent to acquire the cooperative position in
the partially observable environment by learning of
the Self-Organizing Map based on these data. Each
hunter agent has own Self-Organizing Map. The
procedure of SLAPSOM is as follows: First, the
operator makes its input vector (hereafter teaching
data) by adding the operator’s intuitive teaching that
expresses each hunter agent’s x, y-desirable coordi-
nate to x, y-coordinate data of all agents. The op-
erator makes enough teaching data for each hunter
agent. Second, the hunter agents learn the relation-
ship between these teaching data by using the Self-
Organizing Map. Last, they acquire appropriate x, y-
coordinate that reflect operator’s intention from own
learned Self-Organizing Map for each input vector.
The Self-Organizing Map is essentially unsupervised
learning, but we use it as supervised learning.
3.2 Self-organizing Map
The Self-Organizing Map (SOM) is one of the neural
network based on unsupervised competitive learning
(Kohonen, 2001). It is composed of the input layer
and the output layer, and each input unit is connected
to all output units by the weight vectors (Figure 2).
This structure makes multi-dimensional input vectors
low level expression and the more resemble features
of input vectors are, the nearer their position is on the
output layer. It has turned out that the SOM is a very
robust algorithm and has superior performance of in-
terpolation, compared with many other neural mod-
els. The SOM is used in various field such as image
analysis, sound analysis, and data mining, because it
has these superior features.
... ...
Output Unit
Input Unit
Output Layer
Weight Vector
Input Layer
Figure 2: A basic structure of Self-organizing Map.
There are two phases called the learning phase and
the judgment phase in the SOM. Learning algorithm
of the SOM is as follows:
1. Set the initial value of weight vectors m
1
, ··· , m
M
randomly
2. Determine the winner unit c for input vector x
n
by
the smallest Euclidean Distance by:
c = argmin
i
kx
n
− m
i
k (1)
3. Update weight vectors of the winner unit c and
units neighboring to c as follows:
m
i
← m
i
+ h
ci
(t)[x
n
− m
i
] (2)
where, h
ci
(t) is a Gaussian neighborhood func-
tion.
4. Repeat steps 2 to 3 until the rule number of times.
We use the fixed value of weight vectors of the learned
SOM in the judgment phase. Therefore, it is possi-
ble to determine the winner unit for each input vector.
The winner unit is calculated by Eq.(1) as well as the
learning phase.
3.3 Implementation
SLAPSOM is composed of two phases. One is the
phase that the operator makes a teaching data set com-
posed of enough teaching data for each hunter agent
as input vector of the SOM and they learn relation-
ship between these teaching data by using the SOM.
Another is the phase that each hunter agent acquires
appropriate x, y-coordinate by using its own SOM. We
call each phase of SLAPSOM the learning phase and
the execution phase. Each phase is a counterpart of
two phases of the SOM. We explain each phase in the
following section.
SUPERVISED LEARNING FOR AGENT POSITIONING BY USING SELF-ORGANIZING MAP
369
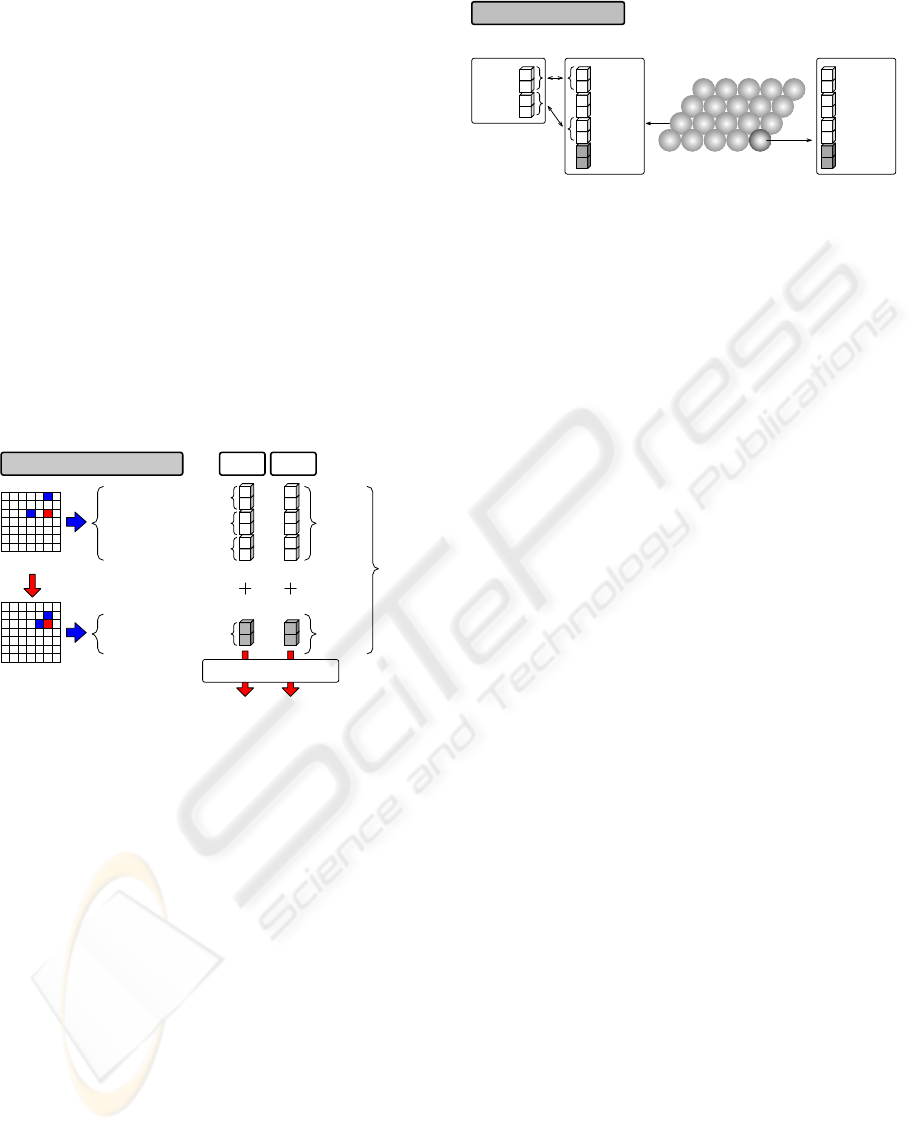
3.3.1 Learning Phase
Teaching data sets of each hunter agent are composed
of the perception part that is x, y-coordinate data of all
agents and the action part that is x, y-coordinate data
of own desirable x, y-coordinate (Figure 3). These
teaching data sets are made by subject of the operator
that overlooks the field. They help each agent to act
cooperatively considering the position of each agent.
The operator makes a teaching data set for each
hunter agent. Hunters learn by the SOM using own
teaching data set as input vectors of the SOM. In other
words, they have the SOM for exclusive use of one-
self. The SOM has a superior performance of inter-
polation, so that it is possible to interpolate between
teaching data. Therefore, learning based on a teach-
ing data set by the SOM helps each hunter agent to
acquire own appropriate x, y-coordinate and reduces
the number of required teaching data.
2
1
2
1
x, y-coordinate of hunter 1
x, y-coordinate of prey
x, y-coordinate of hunter 2
Perception
part
Action
part
Modification
Desirable x, y-coordinate
of each hunter
5
1
4
2
5
2
3
2
5
0
5
2
3
2
5
0
Coordinate data
Desirable coordinate data
Each hunter learns by SOM
Before simulation hunter 1 hunter 2
Teaching
data
Figure 3: An example of making the teaching data set and
learning by the SOM.
3.3.2 Execution Phase
Each hunter agent gives the perception information
that they could get at the step in the multi-agent en-
vironment as the input vector of the SOM to own
learned SOM. And they calculate Euclidean Distance
between the weight vector of each output unit and per-
ception information. It is the data that they could get,
so that it may be partial data potentially. They deter-
mine the winner unit for the input vector of the small-
est Euclidean Distance. They get x, y-coordinate that
reflect the operator’s intention from the action part of
the winner unit and moves based on it at the next step
(Figure 4). SLAPSOM can cope with a partial data
such as perception information potentially, because
the SOM is a very robust algorithm, compared with
many other neural models.
prey
hunter 2
prey
hunter 1
hunter 2
Ideal of
hunter 2
Visual field data
of hunter 2
Weight vector of
each output unit
Weight vector of
winner unit
Desirable
coordinate
of hunter 2
Learned SOM of hunter 2
Throughout simulation
Figure 4: An example of the calculation of execution phase.
4 EVALUATION EXPERIMENT
For evaluating SLAPSOM, we have done two evalu-
ation experiments using the pursuit problem. In the
experiment 1, we change the number of the teach-
ing data in order to verify the learning performance
of SLAPSOM for each setting of the number of the
teaching data. In the experiment 2, we change the
range of the visual field of the hunter agent in order
to verify performance in the partially observable en-
vironment.
The common settings of two evaluation experi-
ments about the pursuit problem are as follows: the
number of hunter agents is 2, field is 7 × 7 non-
toroidal grid world, the information that each hunter
agent gets is the absolute coordinate of the agent that
comes into the visual field of the hunter including it-
self. The settings of the SOM are as follows: map size
of output layer is 30 × 30, the number of learning is
100000 times.
4.1 Experiment 1
In the experiment 1, we compare SLAPSOM with the
neural network that is one of the most general meth-
ods as supervised learning for verifying the learn-
ing performance because SLAPSOM uses supervised
learning. We change the number of the teaching data
(20, 25, 30, 35, 40, 45, 50) and inspect for each case.
We give same teaching data set to SLAPSOM and the
neural network. In our study, it is made by the op-
erator’s intuitive teaching, so that it is better that the
number of teaching data is fewer.
We use three-layered neural network based on
back-propagation learning algorithm (Rumelhart and
McClelland, 1986). Settings of it are as follows: The
number of hidden layer’s units is 20. The value of
learning coefficient is 0.3. The moment coefficient is
0.7. The threshold of errors is 0.08. The value of out-
put is calculated by using perception information as
well as SLAPSOM.
Figure 5 shows the result of the experiment 1. The
average number of steps to the goal is the average of
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
370
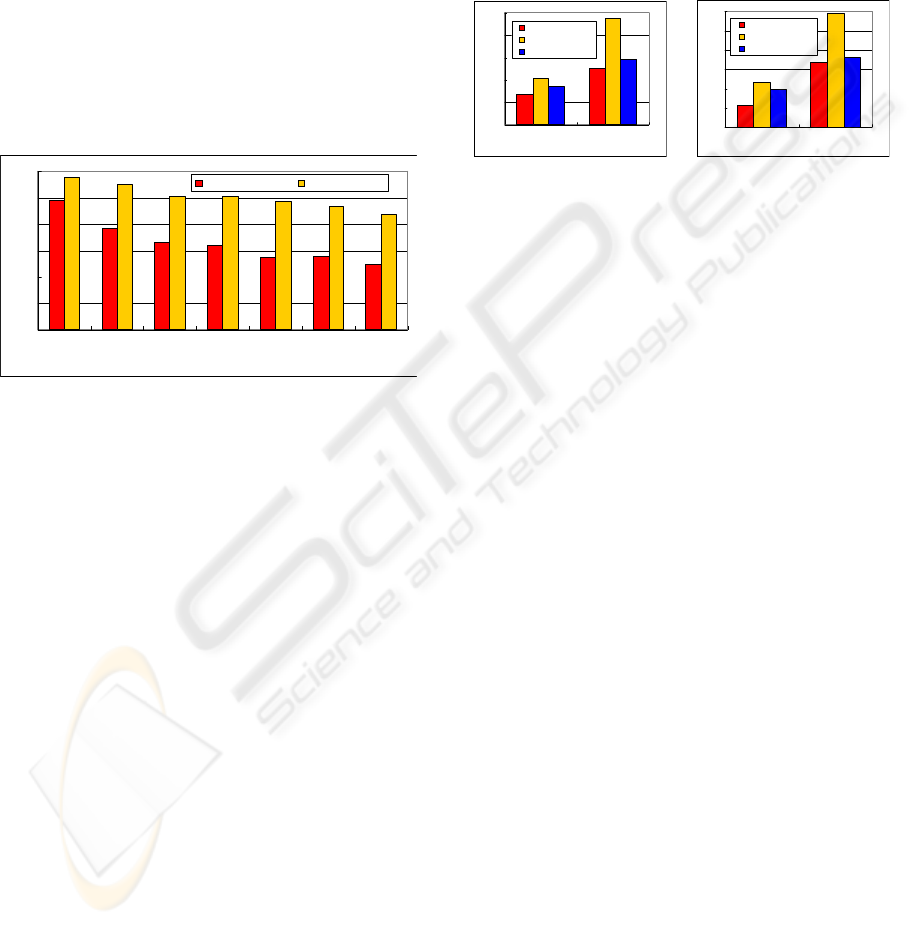
10000 episode’s steps. The range of the visual field of
each hunter agent is 7×7. We confirmed that the av-
erage number of steps of SLAPSOM is significantly
superior to that of the neural network in all cases. Re-
duction of the average number of steps equals to the
acquirement of cooperative actions between agents
effectively. We also confirmed that SLAPSOM helps
reduction of the number of teaching data significantly.
For example, the learning performance of SLAPSOM
given 20 teaching data corresponds to that of the neu-
ral network given 40 teaching data. These results
show that SLAPSOM helps acquirement of cooper-
ative actions between hunter agents and reduction of
the number of teaching data significantly as compared
with the neural network.
Proposed Method Neural Network
20 25 30 35 40 45 50
30
25
20
15
10
5
0
The averate number of steps to the goal
The number of teaching data
Figure 5: The result of experiment 1.
4.2 Experiment 2
In the experiment 2, we compare two cases that the
ranges of the visual fields of hunter agents are 5 × 5
and 7 × 7. For evaluating SLAPSOM, we prepared
three learning model: SLAPSOM, the neural net-
work, and the profit sharing. We compare it with
the profit sharing in addition to the neural network
because the profit sharing is one of the most suit-
able methods for multi-agent reinforcement learning.
Hunter agents can’t get the information about other
hunter agents and a prey agent that is not within their
visual fields. We need to verify whether hunter agents
can cope with the case that the ranges of their visual
fields are narrow so that the perception information
that hunter agents could get are fewer in such partially
observable environment.
In this paper, we implement coarse-graining
method for the profit sharing, because it demands a
large number of trials in the case that the amount of
perception information increases (Ito and Kanabuchi,
2001). The coarse-graining used in our experiment is
the method that each hunter agent treats other agents
as a part of environment. The position of the prey
agent is represented by eight directions as perception
information. It is hopeful that convergence of learn-
ing is much faster by treating perception information
as this. Then the weight of action rule is updated as
the normal profit sharing algorithm by:
w(s
i
, a
i
) ← w(s
i
, a
i
) + f(r, i) (3)
where, w(s
i
, a
i
) is the weight of i-th action rule on a
series of rule, s
i
is the state, a
i
is the action, r is the
value of reward, and f is reinforcement function.
Range of the visual field of each hunter
7 x 7 5 x 5
Proposed Method
Neural Network
Profit Sharing
50
40
30
20
10
0
The average number of steps
(a) The average number of
steps.
60
50
40
30
20
10
0
Standard deviation
Range of the visual field of each hunter
7 x 7 5 x 5
Proposed Method
Neural Network
Profit Sharing
(b) Standard deviation.
Figure 6: The result of experiment 2.
Figure 6(a) shows the result of the average number
of steps to the goal for each setting. The profit shar-
ing is the reinforcement learning, so that we use the
results from 100001 to 100100 episodes after 100000
learning. The settings of the SOM and the neural net-
work are equal to them of the experiment 1. And we
gave 50 teaching data to SLAPSOM and the neural
network. As the result, we confirmed that SLAPSOM
was superior to the neural network and the profit shar-
ing that is one of the most suitable method for multi-
agent reinforcement learning. In the case of 5× 5, we
also confirmed that the result of the neural network
gets worse significantly as compared with the case of
7 × 7. On the other hand, the result of SLAPSOM
does not have a big change between 5 × 5 and 7 × 7
, as compared with the result of the neural network.
The result of standard deviation is similar to the re-
sult of the average number of steps to the goal (Figure
6(b)). Therefore, it is shown that SLAPSOM helps
each hunter agent to acquire cooperativeactions in the
partially observable environment such as the case that
the range of the visual filed of the hunter agent is nar-
row.
5 RELATED RESEARCH
As related researches, we cite a teaching method by
using Self-Organizing Map for reinforcement learn-
ing (Tateyama et al., 2004), and reinforcement learn-
ing agents with analytic hierarchy process (Katayama
et al., 2004).
The former’s method uses the SOM for acquiring
SUPERVISED LEARNING FOR AGENT POSITIONING BY USING SELF-ORGANIZING MAP
371

appropriate actions of agents as well as SLAPSOM.
They apply their method to a task of mobile robot
navigation in addition to the pursuit problem that we
take up as evaluation experiment. Their method dif-
fers from SLAPSOM in that each hunter agent ex-
cludes other hunter agents in the learning phase. They
have done a simulation of mobile robot navigation
with an only agent. And, in the simulation of the pur-
suit problem each hunter agent reinforces their actions
that they approach a prey agent, so that they exclude
other hunter agents. On the other hand, each hunter
agent learns by the SOM with including the position
of other hunter agents in SLAPSOM, so that it is pos-
sible to acquire advanced cooperative actions as am-
bush in addition to the action that is approach to a prey
agent.
The latter’s method is similar except the reinforce-
ment learning to the pursuit problem. They also pro-
pose a combination method between analytic hierar-
chy process (AHP) and the profit sharing. They show
that their method based on AHP that is superior in the
result of the early learning stage and the profit sharing
that is superior in the result of the later learning stage
help each other. Their method differs from SLAP-
SOM in excluding other hunter agents as well as the
former’s method. SLAPSOM can give operator’s in-
tuitive teaching that the operator overlooks the field
by using the coordinate data, and help acquiring co-
operative actions between hunter agents. As another
different point, their method can get only the direc-
tion that hunter agent will move, on the other hand
SLAPSOM can get the coordinate that hunter agent
will move at the next step. It is possible for SLAP-
SOM to cope with the real number environment and
acquire detailed cooperative actions potentially.
6 CONCLUSIONS
In our study, we proposed a multi-agent cooperative
method where each agent can cope with partial obser-
vation, interpolate between teaching data, and reduce
the number of them by using the Self-OrganizingMap
as supervised learning.
For evaluating our proposed method, we did two
experiments using the pursuit problem. As the results,
our proposed method helped reduction of the number
of teaching data significantly as compared with the
neural network and acquiring cooperative actions be-
tween hunter agents in the partially observable envi-
ronment.
In our future work, we have to do more complex
experiments, because the settings of this paper’s ex-
periment were relatively simple as the field size is
7 × 7 and the number of hunter agents is 2. We aim
to implement our proposed method for more compli-
cated tasks of multi-agent system such as RoboCup
Soccer Simulation. We consider making the GUI
tools that the operator can make teaching data sets
more conveniently, because we cite increase of the
operator’s work as a current problem of our proposed
method.
REFERENCES
Akiyama, H. and Noda, I. (2008). Triangulation based
approximation model for agent positioning problem.
Transactions of the Japanese Society for Artificial In-
telligence, 23(4):255–267.
Ito, A. and Kanabuchi, M. (2001). Speeding up multi-agent
reinforcement learning by coarse-graining of percep-
tion –hunter game as an example–. The transactions
of the Institute of Electronics, Information and Com-
munication Engineers, J84-D-1(3):285–293.
Katayama, K., Koshiishi, T., and Narihisa, H. (2004). Re-
inforcement learning agents with analytic hierarchy
process: a case study of pursuit problem. Trans-
actions of the Japanese Society for Artificial Intelli-
gence, 19(4):279–291.
Kohonen, T. (2001). Self-Organizing Maps(3rd ed.).
Springer.
Ono, N. and Fukumoto, K. (1997). A modular approach to
multi-agent reinforcement learning. Springer-Verlag.
Rumelhart, D. and McClelland, J. (1986). Learning inter-
nal representation by error propagation. Parallel Dis-
tributed Processing: Explorations in the Microstruc-
ture of Cognition, 1:318–362.
Tateyama, T., Kawate, S., and Oguchi, T. (2004). A teach-
ing method by using self-organizing map for rein-
forcement learning. Transactions of the Japan Society
of Mechanical Engineers, 70:1722–1729.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
372
