
TOWARDS AUTOMATED SIMULATION OF MULTI AGENT BASED
SYSTEMS
Ante Vilenica and Winfried Lamersdorf
Distributed Systems and Information Systems, Computer Science Department, University of Hamburg, Hamburg, Germany
Keywords:
Multi agent based simulation, Optimization, Automatization, Declarative description language.
Abstract:
The simulation of systems offers a viable approach to find the optimal configuration of a system with respect
to time, costs or any other utility function. In order to speed up the development process and to relieve
developers from doing cumbersome work that is related to the execution of simulation runs, i.e. doing the
simulation management manually, it is desirable to have a framework that provides tools which perform the
simulation management automatically. Therefore, this work addresses this issue and presents an approach that
reduces the effort to manage simulations, i.e. it eases and automates the execution, observation, optimization
and evaluation. The approach consists of a declarative simulation description language and a framework that
is capable of automatically managing simulations. Thereby, this approach reduces the costs, i.e. with respect
to time and money, to perform simulations. Furthermore, this work targets a special subset of simulations, i.e.
multi agent based simulation, that has grown large attention in many areas of science as well as in commercial
applications in the last decade. The applicability of the approach is proven by a case study called ”mining ore
resources” that has been conducted.
1 INTRODUCTION
Multi-Agent Systems (MAS) are a well established
approach to model and build complex distributed sys-
tems. Due to the inherent distribution and separa-
tion of functionality as well as the ability to act au-
tonomous software agents are a suited paradigm to
build applications that consist of many single enti-
ties that cooperate in order to achieve a certain goal.
The purposeful developmentof MAS is challenged by
the dynamics that these systems exhibit and it leads
sometimes to emergent phenomena (Serugendo et al.,
2006). Therefore, it is a real challenge for application
developers to equip the vast number of parameters
that agents may have with appropriate values in order
to ensure an appropriate behaviour of the MAS appli-
cation. In order to handle this challenge (Edmonds
and Bryson, 2004) have proposed a simulation-based
development process that validates parameter settings
in order to understand the behaviour of the system.
Simulation itself has a long tradition in science
and it is sometimes called as the ”the third way of
doing science” (Macal and North, 2007, page 95) be-
sides observation and experimentation (Kelly, 1998).
Thereby,simulation is used for many reasons. Mostly,
it is used to gather information about systems that are
not accessible due to undesired perturbations. Fur-
ther, it is applied when the behaviour of the system
has a time scale that is too small or to large in order
to be observated (Banks, 1998).
This work targets multi-agent based simulation
(MABS) (Drogoul et al., 2002) which has progres-
sively replaced simulation techniques like object-
oriented (Troitzsch, 1997) or micro-simulation (Or-
cutt, 1957) in many areas. MABS is therefore mostly
of interest for areas that benefit from the opportu-
nity to model and simulate different types of individ-
uals at the same time. In the last ten years MABS
has been successfully used in sociology (Pietrula
et al., 1998), chemistry (Resnick, 1995), physics
(Schweitzer and Zimmermann, 2001), ecology (Hu-
berman and Glance, 1993) and economy (Said et al.,
2002). In economy, for instance, MABS has been
used to gather information and knowledge about stock
markets, self organising markets, trade networks, the
management of supply chains and the behaviour of
consumers. One prominent example of the link be-
tween MABS and economy is the Eurace
1
project
that aims at simulating the whole european economic
space (Groetker, 2009). Thereby, information taken
1
http://www.eurace.org/
38
Vilenica A. and Lamersdorf W. (2010).
TOWARDS AUTOMATED SIMULATION OF MULTI AGENT BASED SYSTEMS.
In Proceedings of the 12th International Conference on Enterprise Information Systems - Software Agents and Internet Computing, pages 38-46
DOI: 10.5220/0002967000380046
Copyright
c
SciTePress

from MABS can be used to reduce costs, optimize
the efficiency of plants or reduce the risk of failure of
an investment to be done.
The work presented here aims at easing the con-
duction of MABS by managing them automatically.
Therefore, a declarative description language for sim-
ulations is presented in connection with a framework
that is capable of computing simulations automati-
cally. This approach enables developers to run dif-
ferent simulations with different settings without the
need to manually adjust the simulation after each run.
Simulations can be conducted as a background pro-
cess or even over night. This reduces the time and at-
tention needed to run simulations for the developers.
Furthermore, the approach presented here can also be
used to search for local maxima (minima) or a global
maximum (minimum) since it contains an optimiza-
tion component.
This paper is structured as follows. The next sec-
tion introduces the declarative simulation language
whereas section 3 describes in detail the architec-
ture of the framework that enables the automated ex-
ecution of simulations. Section 4 presents a case
study from the area of economy that has been con-
ducted using the simulation description language and
the framework. Related work is discussed in section
5 before section 6 gives a conclusion and talks about
future work.
2 DESCRIBING SIMULATIONS
USING A DECLARATIVE
LANGUAGE
This section will present a declarative simulation lan-
guage that is designed in order to describe all infor-
mation related to the execution and evaluation of a
simulation.
2.1 DSDL: Declarative Simulation
Description Language
The aim of the declarative simulation description lan-
guage (DSDL) is to offer application developers an
easy to use but still powerful and flexible language to
describe MABS that can be conducted automatically.
Therefore, the benefit of automatically executing the
simulation and evaluating the results has to be much
higher than the effort needed to model the simulation
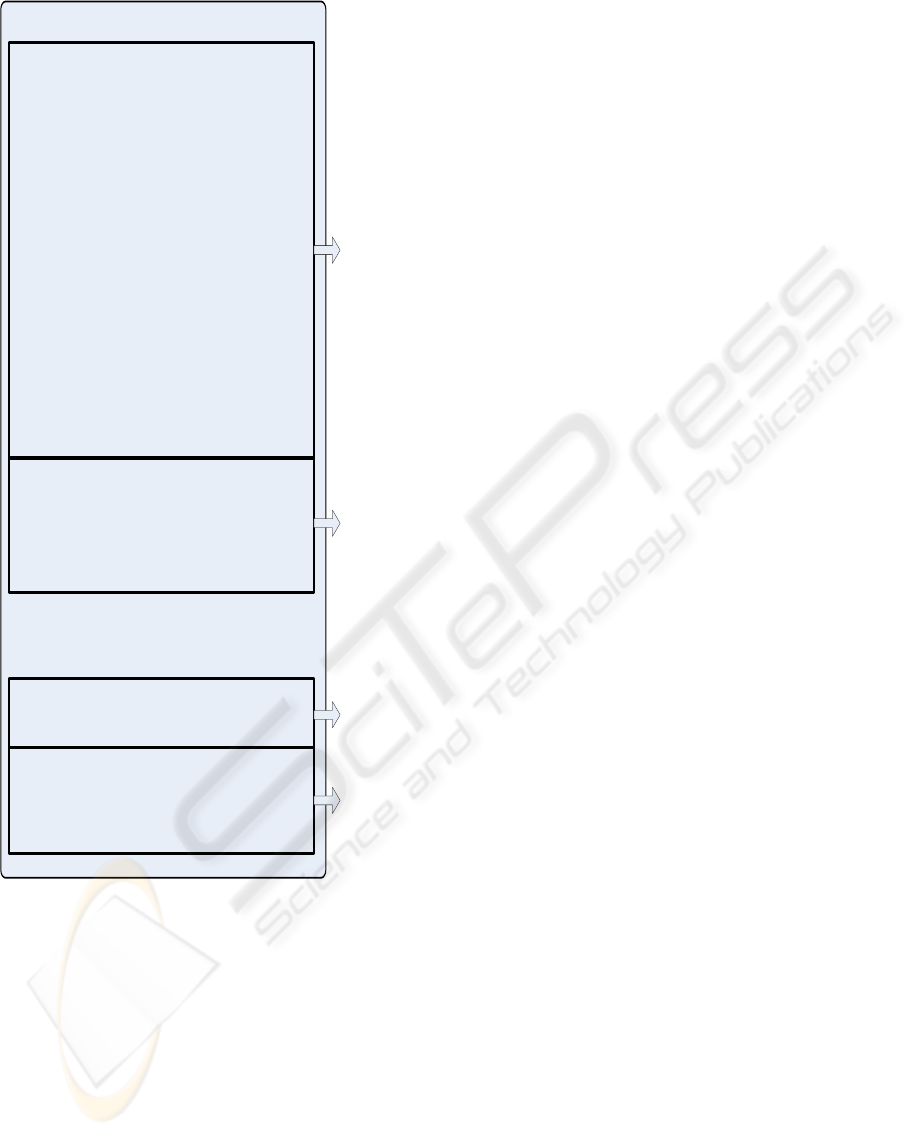
with the description language. Figure 1 depicts the
most important aspects of the simulation language on
an abstract level whereas figure 2 shows a code list-
ing using DSDL to define an automated simulation.
DSDL itself has been defined using XML Schema.
Therefore, it bases on a widespread standard that is
supported by various software tools which again en-
able a convenient way to create such files. The next
subsections will explain the elements of DSDL in de-
tail.
2.1.1 Run Configuration
First of all, DSDL introduces the concept of ensem-
bles and single experiments. A simulation consists of
i ensembles that again consist of j single experiments
with i, j ∈ 1...n. Thereby, one ensemble represents
one possible setting of parameters which is simulated
j-times. Such a hierarchy is especially needed for
simulations that have a non-deterministic behaviour.
Thus, in order to get a significant result several sin-
gle experiments have to be conducted. The settings
for the ensembles and single experiments are done in
the run configuration part of DSDL. Also, this part
handles two other important aspects: the termination
condition for the experiments as well as the start time
of the simulation.
Termination conditions can be either a time ex-
pression, i.e. the duration an experiment should run,
or a semantic expression, i.e. denoting a criterion
that has to be true in order to terminate the experi-
ment. Semantic expressions can be formulated using
the Java Condition Language (JCL)
2
. This language
roughly supports expressions that can be formulated
within an ”if” statement in Java.
The other aspect, i.e. the start time, works as a
timer for the simulation. It allows to postpone the
start of the simulation by specifying either a relative
or absolute time. Such an option is especially inter-
esting for simulations that need many resources and
that should therefore be conducted at a time when the
computer is mostly idle.
2.1.2 Data Observer
Data observers allow to specify those elements of the
simulation that should be observed and that in conclu-
sion help to determine the fitness of a certain parame-
ter setting. Such observed elements are mostly certain
agent types or objects in the environment. Data ob-
servers may also contain certain filters that determine
whether all elements of a type should be observed
or only certain ones. Therefore, the observation can
be customized to the needs of every simulation set-
ting. Also, it can be defined whether the observation
should pull data from the observed elements periodi-
cally, i.e. every n seconds, or on change, i.e. a certain
2
http://jadex-rules.informatik.uni-hamburg.de/xwiki/
bin/view/Resources/Rule+Languages
TOWARDS AUTOMATED SIMULATION OF MULTI AGENT BASED SYSTEMS
39
Optional Components
Simulation ConfigurationData Observer
Visualization
Optimization and
Parameter
Sweeping
Persist Options
Run Configuration
Distribution Options
Mandatory Components
Figure 1: Most important components of DSDL.
trigger is activated that denotes an interesting event.
Thus, the observed events have an id, value and times-
tamp. These raw data can then be further processed
by other components, i.e. especially the optimization
and parameter sweeping part as well as the visualiza-
tion unit.
2.1.3 Optimization and Parameter Sweeping
The optimization of a MAS application with respect
to a given utility function is the main motivation for
automatically executing simulations. Thereby, var-
ious methods and algorithms can be applied while
sweeping through a parameter space in order to find
local optima (minima) or a global optimum (mini-
mum).
Generally, algorithms for optimization can be di-
vided into two subclasses: deterministic and proba-
bilistic approaches. The first ones ”are most often
used if a clear relation between the characteristics
of the possible solutions and their utility for a given
problem exists” (Weise, 2008, page 22). In contrast,
the latter ones are more feasible if ”the relation be-
tween a solution candidate and its ’fitness’ are not so
obvious or too complicated, or the dimensionality of
the search space is very high” (Weise, 2008, page 22).
Additionally, the same author has proposed a taxon-
omy of global optimization algorithms that shows the
different approaches and techniques that are applied
in this area.
Nevertheless, DSDL does support the use of any
optimization algorithm due to its black box approach.
Therefore, it relies on the Jadex XML data binding
framework
3
which allows easily to specify the opti-
mization library that will be loaded at runtime to per-
3
http://jadex-xml.informatik.uni-hamburg.de/xwiki/
bin/view/About/Overview
form the optimization. The developer specifies the
needed input parameter settings in DSDL and those
parameters a passed to the referenced optimization li-
brary which again returns the output parameter set-
tings. Even more, DSDL does support parameter
sweeping without the use of dedicated optimization
methods. Thereby, it is inspired by the specification
of batch parameters used in Repast Symphony
4
. It
allows to define a parameter range and the step size
that should be applied in order to sweep through this
range. Also, a simple list of parameters can be spec-
ified that should be iterated through. Moreover, pa-
rameter sweeps can also be nested, i.e. the sweeping
through ranges of different parameters can be easily
combined.
2.1.4 Visualization
The visualization section of DSDL is an optional
component. It does not have to be specified in order to
run a simulation but it can help to understand the re-
sults by not only having the pure facts but also a visual
representation. Thereby, this component is closely re-
lated to the events received from the data observer. It
can take these events and compute different (statisti-
cal) functions that support the evaluation of a certain
parameter setting. Also, the visualization component
can cake eventsfrom different observers and visualize
them within the same chart. Thereby, different types
of charts like pie, area, line, bar, histogram etc. are
supported.
Now, that the features of DSDL have been pre-
sented the next section will introduce the architecture
of a system that is capable of automatically process-
ing simulations specified in this language.
4
http://repast.sourceforge.net/docs/reference/SIM/Batch
Parameters.html
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
40
<SimulationConfiguration name="MarsWorldExperiments"
applicationReference="..\\jadex\\MarsWorldSimulationExperiments.application.xml">
<Observers>
<Observer>
<Data name="StepLogger">
<ObjectSource type="BDI_Agent" name="Sentry"/>
<ElementSource type="BDI_BELIEF" name="myPos" class="String"/>
</Data>
<Evaluation mode="periodical" value="1000"/>
<Filter mode="all"/>
</Observer>
<Observer>
<Data name="HomebaseLogger">
<ObjectSource type="ISpaceObject" name="homebase"/>
<ElementSource type="Property" name="ore" class="String"/>
</Data>
<Evaluation mode="onChange"/>
</Observer>
<Observer>
<Data name="MissionTime">
<ObjectSource type="ISpaceObject" name="environment"/>
<ElementSource type="Property" name="time" class="long"/>
</Data>
<Evaluation mode="periodical" value="1000"/>
</Observer>
</Observers>
<DataVisualization>
<Input>$MissionTime</Input>
<Function name="MeanValue" aggregate="all"/>
<Function name="MedianValue" aggregate="all"/>
<Type>LineChart</Type>
<Labels xAxis="Number of sentries" yAxis="Time in seconds"
title=“Evaluation of case study: mining ore resources“/>
</DataVisualization>
<Optimization>
<Data name="NumberOfSentries">
<ObjectSource type="BDI_Agent" name="Sentry"/>
<ElementSource type="AgentNumber" name="AgentNumber" class="Int"/>
</Data>
<ParameterSweeping tpye="increment">
<Configuration start="1" end="15" step="1" class="int"/>
</ParameterSweeping>
</Optimization>
<RunConfiguration>
<Ensembles experiments="60">
<TerminateCondition>
<TargetFunction function="$homebase.ore == 100"/>
</TerminateCondition>
</RunConfiguration>
</SimulationConfiguration>
Data Observers
Visualization
Parameter
Sweeping
Run
Configuration
Figure 2: Exemplarily simulation description using DSDL.
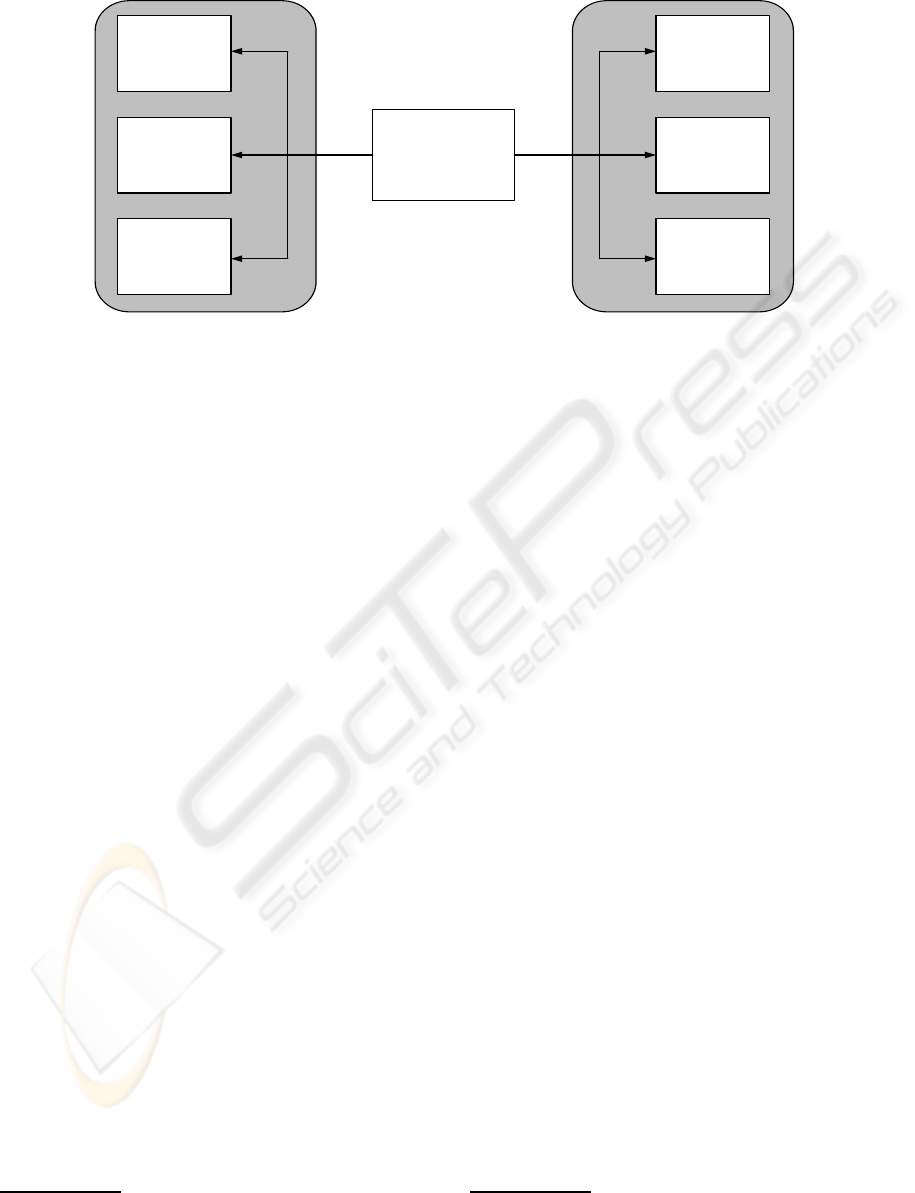
3 SYSTEM ARCHITECTURE OF
THE FRAMEWORK
The basic idea of this framework is to relieve appli-
cation developers from further work once the simula-
tion has been modelled using DSDL. The simulation
is automatically managed by the framework and the
developer can continue working on other things until
the simulation terminates.
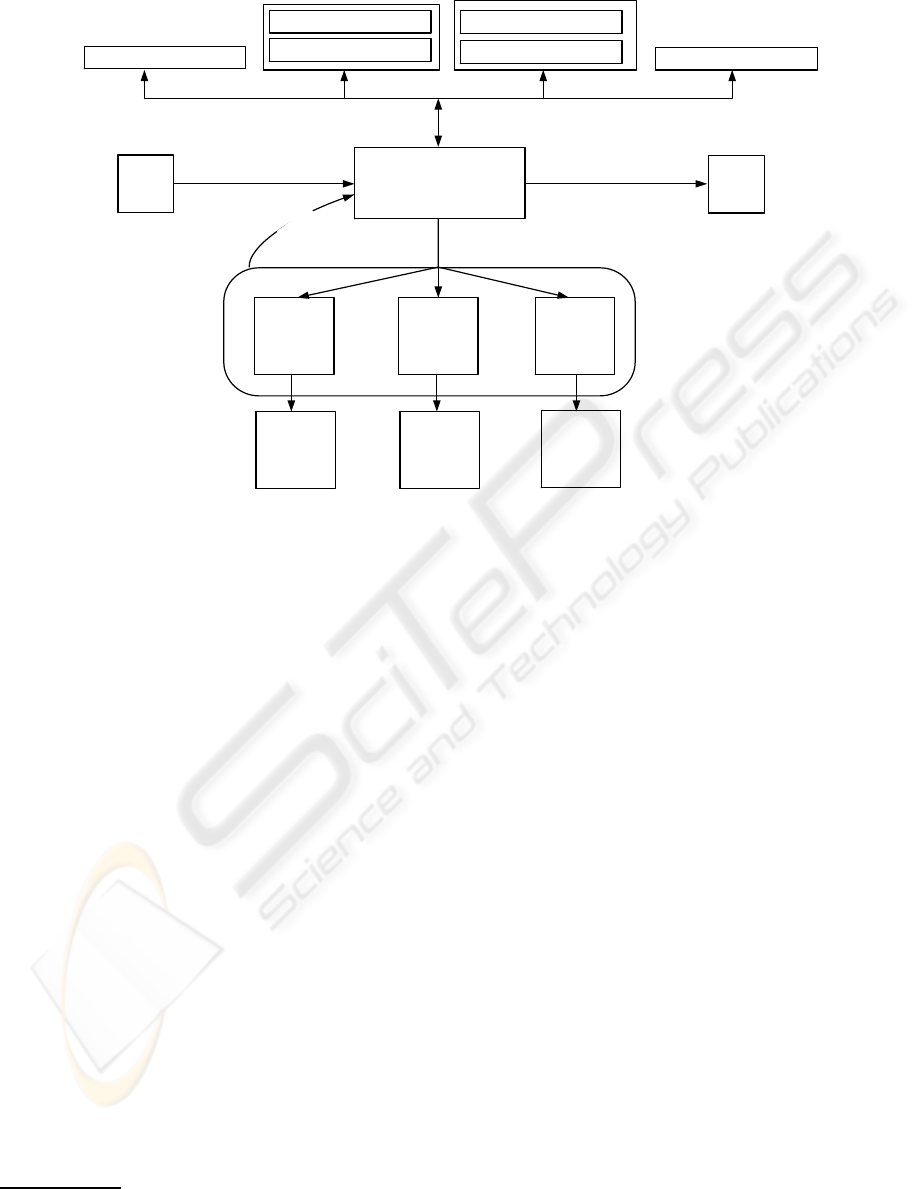
Figure 3 depicts the architecture of the framework
that is capable of automatically executing simulation
experiments. It shows that the framework itself is
composed as a MAS and that it consists mainly of
two types of agents that handle the simulation.
The master simulation agent encapsulates the
main functionality. It processes the declarative sim-
ulation description (cf. section 2) that contains all in-
formation and parameters that are needed to perform
the simulation experiments and returns the results of
the simulation to the developer. Thereby, the master
simulation agent does not perform the single simula-
tion experiments itself. Moreover, it delegates those
to a client simulation agent that is in charge of per-
forming a single experiment. Basically, the master
simulation agent consists of four components: a simu-
lation run manager, a visualization component,an op-
timization component and a distribution component.
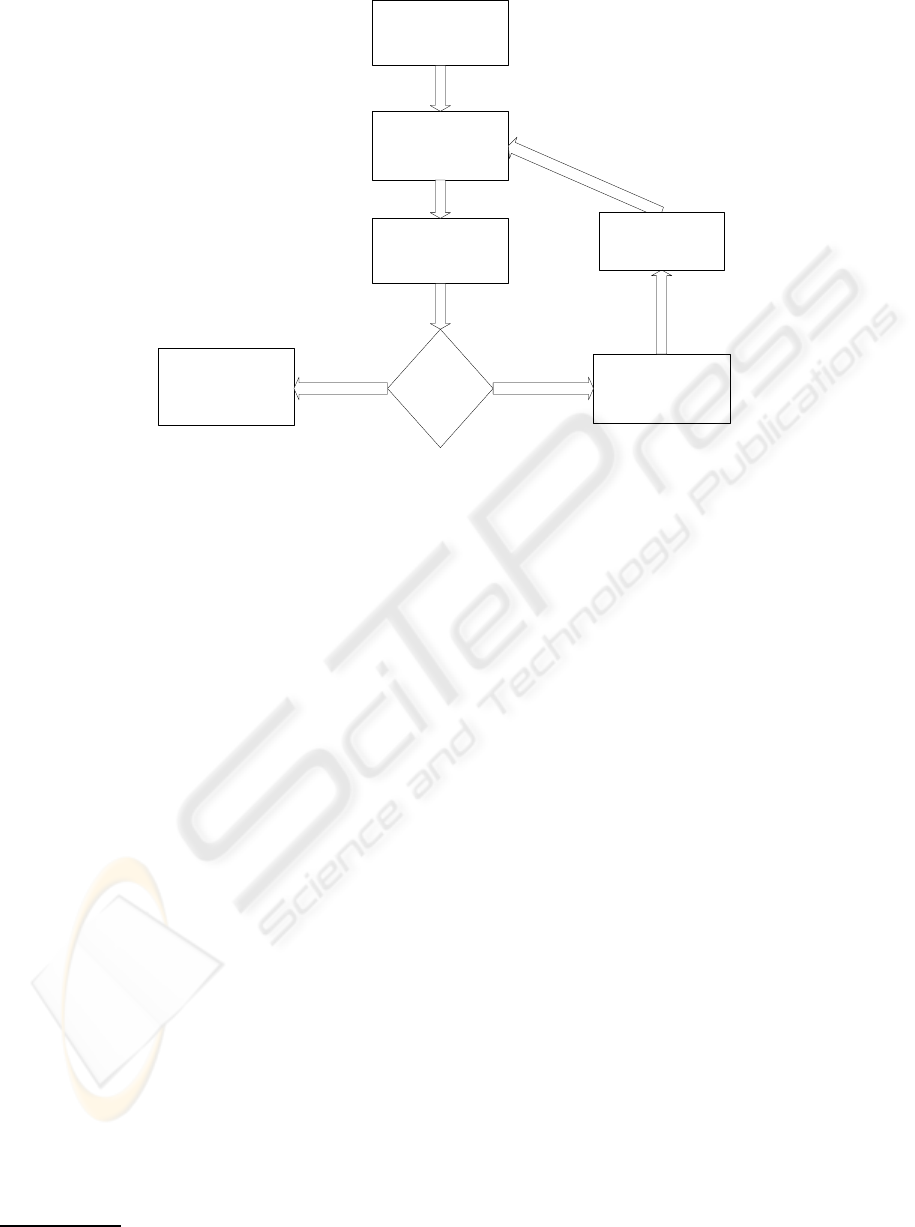
Thereby, the simulation run manager is the most
important component. It is instantiated on agent cre-
ation and it handles the progress of the whole simula-
tion by delegating tasks to other subcomponents and
agents. Figure 4 shows the workflow of the master
simulation agent. After the agent has parsed the simu-
lation description it creates a task for the execution of
the first ensemble. The experiments of this ensemble
are performed by the client simulation agents. Once
the master agent has received these results it evaluates
the observed data accordingly to the simulation de-
scription. Furthermore, the agent persists the raw data
results in a database in order to make sure that they
can be later reprocessed in a different manner than
described in the description. Therefore, this approach
makes sure that the single simulation results can be
analyzed easily after the simulation has been termi-
nated. As the master simulation agent has received all
the results of the experiments of an ensemble it has
to compute the target function of the simulation. This
function may be defined as a simple parameter sweep-
ing with predefined values or it may be a utility func-
tion. Depending on the result of the evaluation of the
target function the simulation master agent terminates
the simulation or it starts to prepare the execution of
a new ensemble with new parameters. In the case of a
simple parameter sweeping those parameters are pre-
defined in the simulation description. In the case of a
utility function the master simulation agent creates a
task for the optimization component. This component
is then in charge of computing the new values for the
parameters. Finally, the master simulation agent cre-
ates a new ensemble and delegates again the execution
of the single experiments to the client agents.
Therefore, it is obvious that the master simula-
tion agent uses basically four components to perform
the simulation and that the simulation run component
manages the execution of the components. Due to the
clear separation of functionality and clear interfaces
TOWARDS AUTOMATED SIMULATION OF MULTI AGENT BASED SYSTEMS
41
Master Simulation Agent
Declarative Simulation
Description
<……
….
……
…./>
Single
Simulation
Experiment
Single
Simulation
Experiment
Single
Simulation
Experiment
Client
Simulation
Agent
- Oberserve Execution
- Collect Data
- Terminate Experiment
Client
Simulation
Agent
Client
Simulation
Agent
Optimization Algorithm A
Optimization Component
R
e
s
u
l
ts
Init
Online
Offline
Visualization Component
Simulation Run Manager
Distribution Component
Optimization Algorithm B
Report File
<……
….
……
…./>
Figure 3: System architecture of the framework for automatically managing simulations.
components can be easily interchanged. This is espe-
cially important for the optimization component and
the visualization component. Since there are many
approaches towards optimization (cf. section 2.1.3) it
is crucial to have an approach that supports the use of
different mechanisms and libraries. Therefore, exist-
ing libraries like the Java Genetic Algorithms Package
(JGAP)
5
can be used within the framework to com-
pute the parameters for a new ensemble.
Also, the visualization of simulation results can be
customized according to the requirements of a certain
application domain. Results may be visualized on the
local computer that is running the simulation by using
existing libraries like JFreeChart
6
. On the other hand,
the results may also be accessed remotely using a web
server and browser to visualize them. Furthermore,
the type of result visualization can not only be dis-
tinguished spatially but also temporarily, i.e. online
or offline visualization. Whereas online visualization
means access to data of currently running simulation
experiments offline visualization denotes the process-
ing of data from simulation runs that have terminated.
Thus, the framework presented here, supports both
approaches at the same time.
Finally, the master simulation agent contains a dis-
tribution component. The aim of this component is
twofold: to speed up the simulation process and to
5
http://jgap.sourceforge.net/
6
http://www.jfree.org/jfreechart/
use the computation power of several nodes in a com-
puter network. By accessing shared computational
resources across several nodes the simulation frame-
work is even able to run massive agent based sim-
ulations (Yamamoto et al., 2007) which can not be
performed on a single computer. On the other hand,
the simulation framework can use the nodes to paral-
lelize, e.g. to speed up, the simulation by running the
single experiments of an ensemble at the same time
on different computers.
The framework, described in this section, has
been implemented using the Jadex Agent Framework
(Braubach et al., 2005). The next section will describe
a case study that has been done using this framework
implementation.
4 CASE STUDY: MINING ORE
RESOURCES
This section will present a case study called mining
ore ressources that was conducted in order to prove
the applicability of the framework introduced in the
section before. First, the setting of the case study will
be present. Second, the processing of the case study
will be described as well as the evaluation of the re-
sults.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
42
Init Master Agent
&
Parse XML-File
Start Ensemble of
Experiments
Evaluate Results of
Ensemble
& Persist
Do Optimization /
Parameter Sweeping
Finish
Compare
with Target
Function
Init Ensemble with
new Parameters
Figure 4: Workflow of the master simulation agent.
4.1 The Setting
The setting of the case study is inspired by an example
presented in (Ferber, 1995) and the basic implemen-
tation of this example was taken from the Jadex ex-
amples library. The case study deals with a MAS that
was implemented in order to perform and coordinate
the mining of ore resources on a non-explored field.
As this setting was initially introduced in connection
with the NASA (National Aeronautics and Space Ad-
ministration)
7
it is sometimes also called marsworld.
Nevertheless, this case study is a representative for
a whole class of problems from the economy. Ba-
sically it targets the question: how many (different)
resources do I need in order to accomplish a goal in
time and budget? Therefore, this is a classic optimiza-
tion function that targets a trade-off often found in the
economy: time vs. money/costs.
Hence, the case study conducted targets the min-
ing of ore resources (cf. figure 5). It consists of three
types of components (i.e. agents): sentries, produc-
ers and carriers. These three components cooperate
in order to achieve the goal, i.e. to find ore resources,
inspect whether they can be explored and finally to
bring the ore to the home base. At the beginning, all
components explore the environment in order to find
ore resources. If an agents finds a resource it reports
the position to the sentry. The sentry is in charge of
inspecting this resource in order to determine its ca-
pacity. If it can be exploited the sentry sends a mes-
sage to the producer that is in charge of producing ore
7
http://www.nasa.gov/home/index.html
as much as the capacity permits. As the producer has
finished its job it informs the carrier. Then, the car-
rier brings the ore to the home base. The agents have
accomplished their goal when all available ore of the
environment has been brought to the home base.
4.2 The Evaluation
Now, the afore described scenario has been taken to
prove the benefit of DSDL and the framework for au-
tomated simulation. In fact, the framework has been
taken in order to answer an important question that
rises from the description of the scenario: What is the
optimal number of sentries, producers and carriers for
a given environment? As every component costs a
certain amount of money it is obvious that the util-
ity function has to take into account the acquisition
cost and operation costs of the agents. Therefore, the
framework has been used to investigate the relation
between the number of operating agents and the time
they need to complete the task.
Table 1 and figure 6 show the results from the sim-
ulation, that focuses on the relation between the num-
ber of sentries and the time needed to accomplish the
goal, i.e. to collect all ore found in the environment.
The results reveal that in the range from 1 to 10 sen-
tries the time decreases continuously as the number
of sentries rises. At the same time it can also be seen
that this relationship does not hold for simulation ex-
periments that contained more than 10 sentries. Two
things can be concluded from these results. First, it
seems that in order to minimize the time needed to
TOWARDS AUTOMATED SIMULATION OF MULTI AGENT BASED SYSTEMS
43
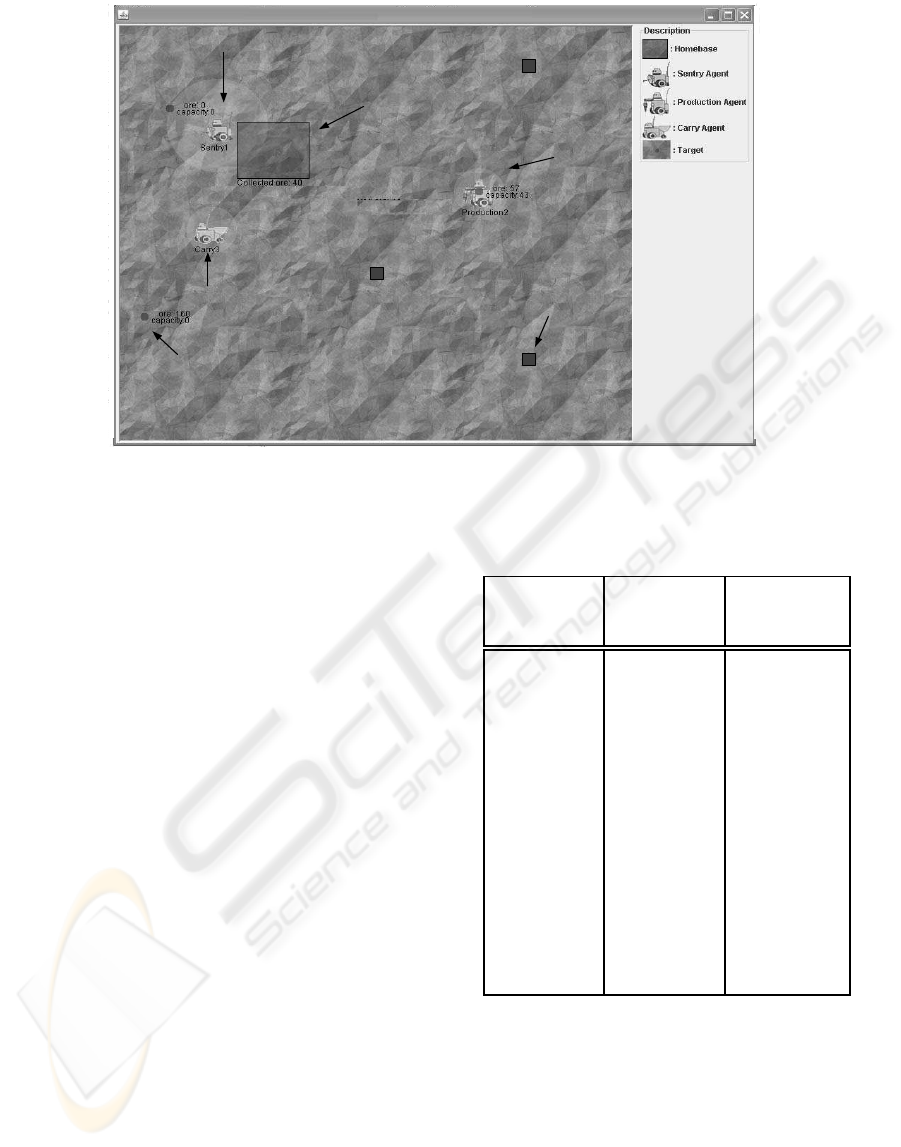
Homebase
Unexplored ore resource
Explored ore resource
Producer: Producing ore
Sentry: Exploring the environment
Carrier: Bringing ore to the homebase
Figure 5: Screenshot depicting the scenario of the case study ”mining ore resources”.
accomplish the goal more than 10 sentries do not pro-
vide a significant speed up. Therefore, other compo-
nents than the sentry seem to be a bottleneck which
prevent a better performance. With respect to the set-
ting of the case study these bottlenecks may be the
carrier and the producer since they are not able to an-
alyze and carry all the ore resources in time that have
been discovered by the many sentries. Second, it can
be concluded from the results of the settings with less
than 10 sentries that there is a trade-off between time
and money. Therefore, it depends on the costs of a
sentry whether an additional sentry, that increases the
costs but speeds up the time, pays off.
The case study has proven the applicability of the
frameworkas well of DSDL. It shows the benefit of an
automated simulation management that allows appli-
cation developers easily to run experiments with dif-
ferent parameter settings without the need to manu-
ally edit, observe or evaluate the simulation runs. All
this work is performed by the framework.
5 RELATED WORK
Most of related work is linked to the interference
between simulation and optimization performed by
MAS. Therefore, existing approaches use simula-
tion runs in order to optimize the performance of
an application with respect to some utility function.
These approaches usually use the phrase simulation
based optimization to characterize their aim and have
basically an infrastructure as depicted in figure 7.
Thereby, these types of approaches often focus on dif-
Table 1: Results of the evaluation of the relationship be-
tween the number of sentries and the time needed to collect
all ore. Every setting was simulated sixty times.
Number of
Sentries
Time:
Mean Value
(sec.)
Time:
Median
Value (sec.)
1 117.94 101.52
2 99.74 87.51
3 84.44 73.75
4 72.13 66.17
5 71.87 65.01
6 62.67 58.51
7 61.45 56.60
8 56.49 54.52
9 55.94 51.04
10 53.95 51.02
11 54.34 52.06
12 52.74 50.19
13 53.92 51.04
14 50.85 49.28
15 52.13 50.55
ferent optimization algorithms and implementations
that use these mechanisms. Often, these approaches
aim to solve problems of a certain application domain.
Whereas (Fu, 2002) has in general investigated how
different optimization techniques are used in the field
of simulation (April et al., 2003; April et al., 2004)
present a software tool that has been used to solve
different real-world problems. These approaches use
a mathematical model as input and do therefore not
take advantage of the possibilities offered by simu-
lation models that base on agents (Macal and North,
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
44
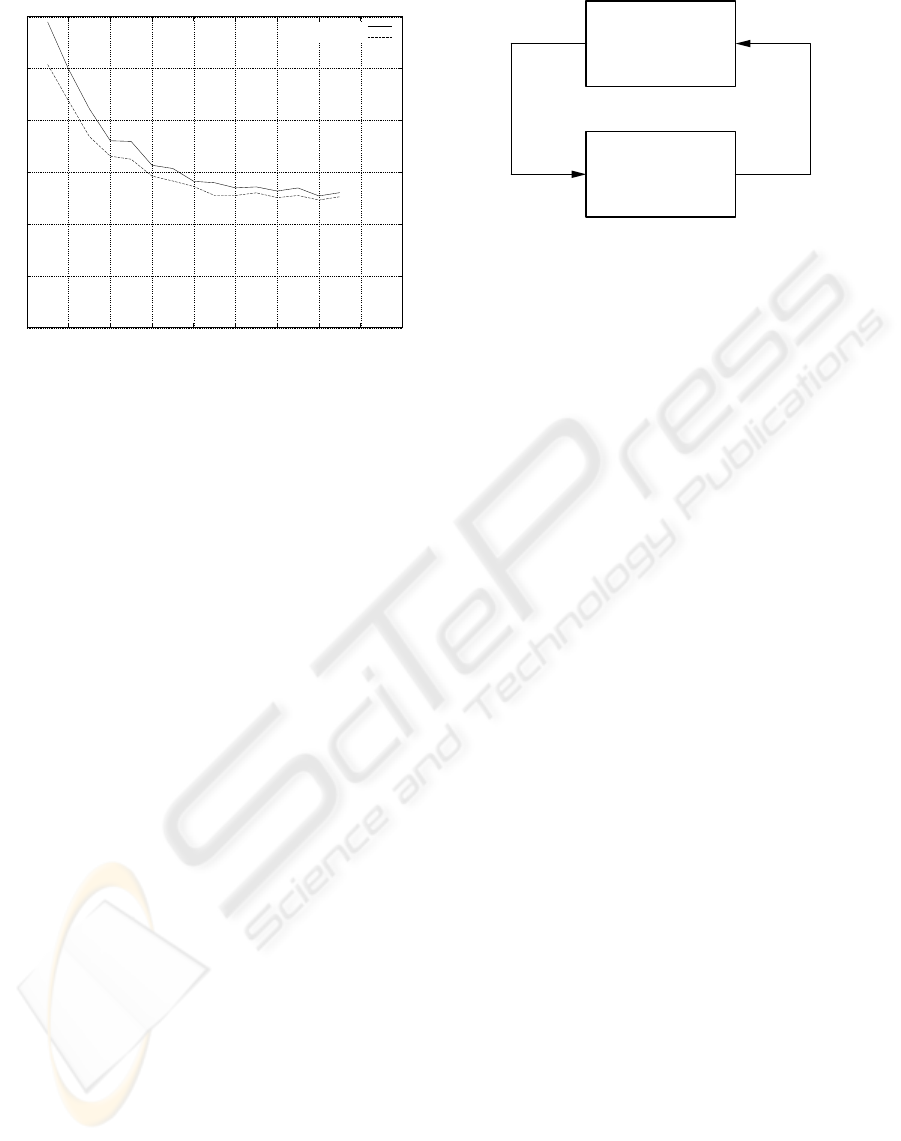
0
20
40
60
80
100
120
0 2 4 6 8 10 12 14 16 18
Time in seconds
Number of sentries
Evaluation of case study: mining ore resources
Mean Value
Median Value
Figure 6: Evaluating the relation between the number of
sentries and the time needed to collect all ore. Every setting
was simulated sixty times.
2007). Also, they are designed as closed systems that
can not be extended by users in order to customize the
software according to their need.
(Brueckner and Van Dyke Parunak, 2003) have
presented an approach that goes one step further than
those described above and that is therefore not only
limited to different optimization techniques. More-
over, this work describes an infrastructure that targets
the evaluation of the properties of dynamic systems.
Thereby, optimization is only one aspect among oth-
ers like visualization or persistence. Unfortunately,
the work of Brueckner et al. lacks of the description
of a simulation modelling language as well as certain
details of the infrastructure that is mostly described
on an abstract level. Therefore, it is difficult to value
this work with respect to reusability and extensibility.
In conclusion, existing work does not offer the
connection of a declarative simulation description
language and an open framework for automatically
conducting simulations that is capable of more than
just doing optimization. Nevertheless, existing opti-
mization techniques and tools can be easily integrated
into this open framework.
6 CONCLUSIONS AND FUTURE
WORK
This work targets the development of complex and
dynamic applications. It advocates, that simula-
tion is a viable approach to gain information about
the dynamic behaviour of such systems. Therefore,
this work has presented an approach that automates
the management of simulations and relieves thereby
Optimization /
Parameter
Sweeping
Simulation
Input
Output
Figure 7: Simulation-based optimization.
the application developer from managing simulations
manually.
The approach consists of a declarative simulation
description language (DSDL) that offers the possibil-
ity to define all aspects related to the execution of
a simulation. In detail, DSDL has components that
define which data has to be observed, how data can
be visualized and persisted. Moreover, DSDL can be
used to define the sweep through a parameter space
and this sweeping can be linked with an optimization
mechanism that supports and speeds up the parameter
sweeping process.
Additionally, this work has presented the architec-
ture and implementation of a framework that is capa-
ble of automatically performing simulations that have
been modelled using DSDL. This framework eases
the developer from manually starting simulations with
certain parameter settings and evaluating them. It
supports the whole life cycle of a simulation with
built-in components that can easily be extended and
customized towards the needs of a certain application
domain.
As a proof of concept, a case study has been con-
ducted that shows the benefit of automatically man-
aging simulations. The case study shows further, how
DSDL and the framework can be used to easily op-
timize the setting of an application with respect to a
certain utility function. Although this work targets the
multi-agent based simulation the approach presented
can be adopted and extended to other simulation tech-
niques.
Future work will strive towards further extending
the functionality of the framework. It is envisioned to
add a component that supports the validation of sys-
tem dynamics by offering the possibility to define hy-
potheses that target the causal structure of the system
as introduced by (Sterman, 2000). Therefore, DSDL
will be extended in order to be able to specify hy-
potheses and the simulation framework will be able
to automatically validate these hypotheses while per-
forming the simulations. Also, it is envisioned to built
up a library that contains the results of all system val-
TOWARDS AUTOMATED SIMULATION OF MULTI AGENT BASED SYSTEMS
45

idations that have been conducted. The aim of this
library is to gain information about the qualitative be-
haviour of systems that exhibit a certain causal struc-
ture. Therefore, it will be able to predict the behaviour
of a system by analyzing its causal structure and com-
paring it with the results from the library.
ACKNOWLEDGEMENTS
The authors would like to thank the Deutsche
Forschungsgemeinschaft (DFG) for supporting this
work in a project on ”Self-organisation based on
decentralized Co-ordination in Distributed Systems”
(SodekoVS). Furthermore, the authors would like to
thank the Distributed Systems and Information Sys-
tems (VSIS) group at Hamburg University, particu-
larly Lars Braubach and Alexander Pokahr, as well
as the Multimedia Systems Laboratory (MMLab) at
HamburgUniversity of Applied Sciences, particularly
Wolfgang Renz and Jan Sudeikat, for inspiring dis-
cussion and encouragement.
REFERENCES
April, J., Better, M., Glover, F., and Kelly, J. (2004). New
advances and applications for marrying simulation
and optimization. In WSC ’04: Proceedings of the
36th conference on Winter simulation, pages 80–86.
Winter Simulation Conference.
April, J., Glover, F., Kelly, J., and Laguna, M. (2003).
Simulation-based optimization: practical introduction
to simulation optimization. In WSC ’03: Proceedings
of the 35th conference on Winter simulation, pages
71–78. Winter Simulation Conference.
Banks, J., editor (1998). Handbook of Simulation. Princi-
ples, Methodology, Advances, Applications, and Prac-
tice. Wiley.
Braubach, L., Pokahr, A., and Lamersdorf, W. (2005).
Jadex: A bdi agent system combining middleware
and reasoning. In Software Agent-Based Applica-
tions, Platforms and Development Kits, pages 143–
168. Birkhaeuser-Verlag.
Brueckner, S. and Van Dyke Parunak, H. (2003). Resource-
aware exploration of the emergent dynamics of sim-
ulated systems. In AAMAS ’03: Proceedings of the
second international joint conference on Autonomous
agents and multiagent systems, pages 781–788. ACM.
Drogoul, A., Vanbergue, D., and Meurisse, T. (2002).
Multi-agent based simulation: Where are the agents?
In MABS, pages 1–15. Springer.
Edmonds, B. and Bryson, J. (2004). The insufficiency of
formal design methods - the necessity of an experi-
mental approach for the understanding and control of
complex mas. In AAMAS ’04: Proceedings of the
Third International Joint Conference on Autonomous
Agents and Multiagent Systems, pages 938–945. IEEE
Computer Society.
Ferber, J. (1995). Les systmes multi-agents. Vers une intel-
ligence collective. InterEditions.
Fu, M. (2002). Feature article: Optimization for simulation:
Theory vs. practice. INFORMS: Journal on Comput-
ing, 14(3):192–215.
Groetker, R. (2009). Europa reloaded. Technology Review,
(2):52–57.
Huberman, B. and Glance, N. (1993). Evolutionary games
and computer simulations. Proceedings of the Na-
tional Academy of Sciences of the United States of
America, 90(16):7716–7718.
Kelly, K. (1998). The third culture. Science,
279(5353):992–993.
Macal, C. and North, M. (2007). Agent-based modeling
and simulation: desktop abms. In WSC ’07: Pro-
ceedings of the 39th conference on Winter simulation,
pages 95–106. IEEE Press.
Orcutt, G. (1957). A new type of socio-economic system.
The Review of Economics and Statistics, 39(2):116–
123.
Pietrula, M., Carley, K., and Gasser, L. (1998). Simulating
Organizations. M.I.T. Press.
Resnick, M. (1995). Turtles, Termites and Traffic Jams.
M.I.T. Press.
Said, L., Bouron, T., and Drogoul, A. (2002). Agent-based
interaction analysis of consumer behavior. In AA-
MAS ’02: Proceedings of the first international joint
conference on Autonomous agents and multiagent sys-
tems, pages 184–190. ACM.
Schweitzer, F. and Zimmermann, J. (2001). Communica-
tion and self-organization in complex systems: A basic
approach. In: Knowledge, complexity and innovation
systems, pages 275–296. Springer.
Serugendo, G., Gleizes, M., and Karageorgos, A.
(2006). Self-organisation and emergence in mas: An
overview. Informatica (Slovenia), 30(1):45–54.
Sterman, J. (2000). Business Dynamics - Systems Thinking
and Modeling for a Complex World. McGraw–Hill.
Troitzsch, K. G. (1997). Social simulation – origins,
prospects, purposes. In Conte, R., Hegselmann, R.,
and Terna, P., editors, Simulating Social Phenomena,
volume 456 of Lecture Notes in Economics and Math-
ematical System, pages 41–54. Springer.
Weise, T. (2008). Global optimization algorithms - theory
and application. E-Book, available at: http://www.it-
weise.de/projects/book.pdf, accessed 2010-04-12.
Yamamoto, G., Tai, H., and Mizuta, H. (2007). A platform
for massive agent-based simulation and its evaluation.
In AAMAS ’07: Proceedings of the 6th international
joint conference on Autonomous agents and multia-
gent systems, pages 1–3. ACM.
ICEIS 2010 - 12th International Conference on Enterprise Information Systems
46
