
MULTI-CAMERA TOPOLOGY RECOVERY USING LINES
Sang Ly
1
, C
´
edric Demonceaux
1
and Pascal Vasseur
1,2
1
MIS laboratory, University of Picardie Jules Verne, 7 rue du Moulin Neuf, 80000 Amiens, France
2
Heudiasyc laboratory, University of Technology of Compi
`
egne, Centre de Recherches de Royallieu
BP 20529, 60205 Compi
`
egne, France
Keywords:
Multi-view reconstruction, Topology recovery, Extrinsic calibration.
Abstract:
We present a topology estimation approach for a system of single view point (SVP) cameras using lines.
Images captured by SVP cameras such as perspective, central catadioptric or fisheye cameras are mapped to
spherical images using the unified projection model. We recover the topology of a multiple central camera
setup by rotation and translation decoupling. The camera rotations are first recovered from vanishing points
of parallel lines. Next, the translations are estimated from known rotations and line projections in spherical
images. The proposed algorithm has been validated on simulated data and real images from perspective and
fisheye cameras. This vision-based approach can be used to initialize an extrinsic calibration of a hybrid
camera network.
1 INTRODUCTION
Multi-camera setups, or camera networks are widely
used in vision-based surveillance activities as it pos-
sesses a larger monitoring area than a single camera.
Calibration is generally a critical step for any further
employ of the cameras. The extrinsic calibration of
a multi-camera system in order to estimate the trans-
formations (or topology) among cameras can be di-
vided into three steps: 1. feature detection and match-
ing among different views, 2. initial reconstruction
of multi-camera topology and 3. optimization of the
reconstruction using bundle adjustment. We present
in this paper a topology reconstruction approach for a
system of multiple SVP cameras which can be used in
the second step of a general calibration. We therefore
review some related works on multi-view reconstruc-
tion approaches.
Multi-view reconstruction methods can be started
with factorization technique. Tomasi and Kanade
(Tomasi and Kanade, 1992) have proposed a fac-
torization method to recover the scene structure and
camera motion from a sequence of images. The im-
plementation of this method is simple and provides
reliable results. However, its use is limited to affine
camera model and it requires that all point features be
visible in all images (Hartley and Zisserman, 2003).
The projective factorization, an extension of the pre-
vious one to projective camera model, has been de-
veloped in (Sturm and Triggs, 1996; Mahamud and
M. Hebert, 2000). It is usually employed as an ini-
tialization for bundle adjustment (Triggs et al., 1999),
which should be the final stage of any reconstruction
algorithm (Hartley and Zisserman, 2003).
Recently, L∞ optimization has been proposed to
solve the structure and motion problem. In (Kahl,
2005), Kahl has presented an L∞ approach based
on second-order cone programming (SOCP) to esti-
mate the camera translations and 3D points assuming
known rotations. Martinec and Pajdla (Martinec and
Pajdla, 2007) have solved the reconstruction problem
in two stages: estimated first camera rotations lin-
early in least squares and then camera translations us-
ing SOCP. The main disadvantage of L∞-norm is that
it is not robust to outliers (Kahl and Hartley, 2008).
Method proposed in (Kahl, 2005) may fail due to a
single wrong correspondence (Martinec and Pajdla,
2007).
Omnidirectional vision systems possess a wider
field of view than conventional cameras. Such de-
vices can be built up from an arrangement of sev-
eral cameras or a single camera with fisheye lens or
with mirrors of particular curvatures. In structure
and motion problem, omnidirectional sensors play an
important role as they overcome several disadvan-
tages when working with perspective cameras, such
as translation/rotation ambiguity, lack of features and
the large number of views in use. In (Antone and
245
Ly S., Demonceaux C. and Vasseur P. (2010).
MULTI-CAMERA TOPOLOGY RECOVERY USING LINES.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 245-250
DOI: 10.5220/0002843302450250
Copyright
c
SciTePress
Teller, 2002), they have first estimated camera ro-
tations using vanishing points of 3D parallel lines
and then extracted camera translations using Hough
transform. This method provided interesting results
but might be time consuming. Moreover, two stages
of their algorithm require different feature types, i.e.
lines for rotation and points for translation estima-
tions. In (Kim and Hartley, 2005), the translations
among omnidirectional cameras have been estimated
from known rotations and point correspondences us-
ing a constrained minimization.
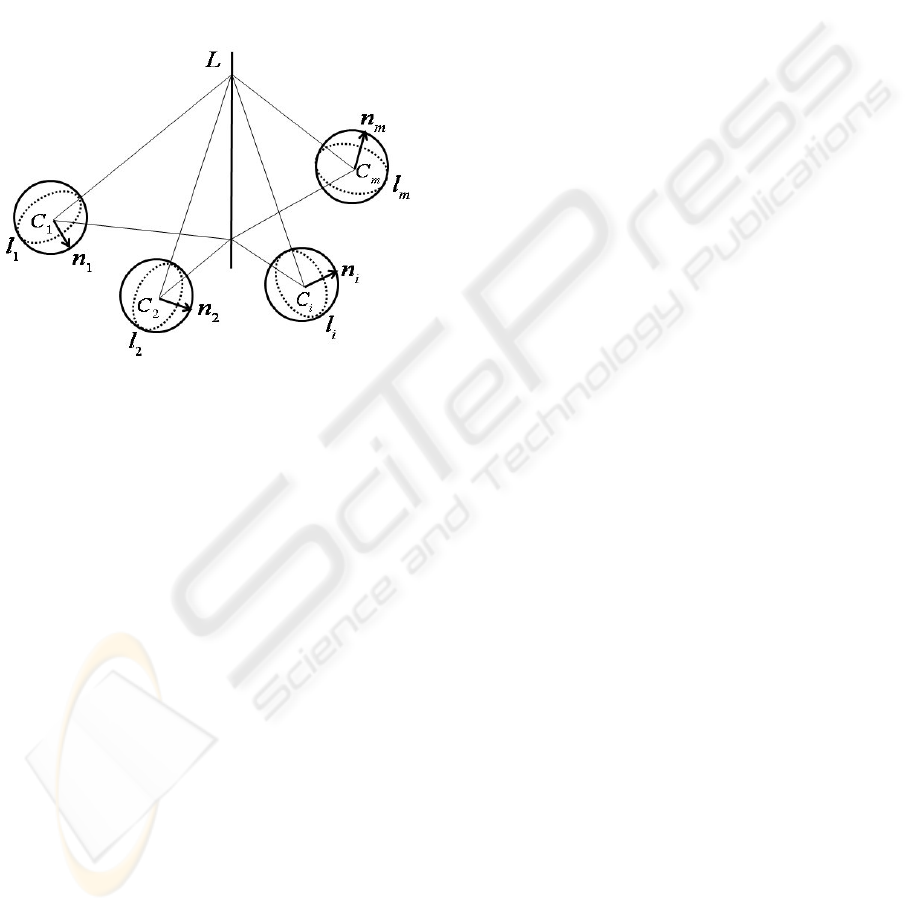
Figure 1: Multi-view geometry of spherical cameras.
In this paper, we propose a multi-view reconstruc-
tion approach in which the rotations are recovered
from bundle of parallel lines and the translations are
estimated from known rotations and line correspon-
dences across multiple views. The two main contri-
butions of this algorithm are as follows:
1. We use the unified projection model proposed by
Mei (Mei, 2007). This model encompasses a large
range of central projection devices including fish-
eye lenses. Hence, our method can be applied
to any kind of SVP cameras such as perspective,
central catadioptric and fisheye cameras. We can
recover the topology of a hybrid camera network
built up from different types of central cameras.
2. Lines are used as the primitive features. Such
features are typically more stable than points and
less likely to be produced by clutter or noise, es-
pecially in man-made environment (David et al.,
2003). Compared to point features, lines are less
numerous but more informative. They have geo-
metrical and topological characteristics which are
useful for matching (Gros et al., 1998; Bay et al.,
2005). Moreover, we use uniquely lines for both
rotation and translation estimations, hence opti-
mizing the computation time of such two-stage
technique.
Our approach is slightly similar to the motion re-
covery from multi-view tensor using lines proposed
in (Gasparini and Sturm, 2008) except that we do not
need to estimate such tensors but recover directly the
transformations by decoupling rotation and transla-
tion.
In the following section, we develop the multi-
view geometry for SVP cameras. Next, we present
our topology reconstruction algorithm using lines.
We show then the experimental results from simulated
data and real images before the conclusions.
2 MULTI-VIEW GEOMETRY
Central imaging systems including fisheye lenses can
be modelled by the unitary sphere, hence consid-
ered equivalent to spherical cameras. Noting that line
correspondences can be used only in more than two
views (Hartley and Zisserman, 2003), we consider a
multi-camera setup composed of at least three central
cameras. In (Torii et al., ), they demonstrated the bi-
linear and trilinear relations among spherical cameras
but did not discuss any further application. In this sec-
tion, we develop a similar trilinear relation which per-
mits the computation of multi-camera topology from
line correspondences.
Notation: Matrices are denoted using Sans Serif
fonts, vectors in bold fonts and scalars in italics.
Consider m spherical cameras with projection cen-
ters C
i
(i = 1,...,m) as illustrated in figure 1. A
line L in 3D space is projected to spherical images
as great circles l
i
with corresponding normals n
i
. L
can be expressed vectorially by L = X
0
+ µd where
L,X
0
,d ∈ IR
3
and µ ∈ IR. And n
i
∈ IR
3
are normal
correspondences in spherical images.
Let [R
i
|t
i
] be the [Rotation|translation] between C
i
and the coordinate system origin O. Assuming that
C
1
is at O, we have [R
1
|t
1
] = [I|0]. As the line L
lies on the projective planes passing through great cir-
cles l
i
and perpendicular to normals n
i
, we obtain the
next relations in which we express L in {O} and n
i
in
{C
i
}:
n
T
i
(R
i
L + t
i
) = 0 (1)
Consider a triplet of views consisting of the view
1 and two other different views a and b. We denote
such triplet by (1,a,b) where 2 ≤ a,b ≤ m and a 6= b.
The trilinear relation among three views 1, a and b is
built up from equation 1 with i = 1,a,b and can be
rewritten as follows:
A
ˆ
L = 0 (2)
where
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
246

A =
n
T
1
0
n
T
a
R
a
n
T
a
t
a
n
T
b
R
b
n
T
b
t
b
and
ˆ
L = (L
T
,1)
T
The existence of at least a non-zero solution in
equation 2 requires that the 3x4 matrix A have rank
2. It results in a linear dependence among three rows
of A. Denoting A = (r
T
1
,r
T
2
,r
T
3
), the linear relation can
be written as r
1
= αr
2
+ βr
3
. Noting that r
14
= 0, we
can select the scalars α = kt
T
b
n
b
and β = −kt
T
a
n
a
for
some scalar k. This can be applied to the first three
columns of A to obtain the next relation:
n
T
1
= αn
T
a
R
a
+ βn
T
b
R
b
(3)
n
1
= αR
T
a
n
a
+ βR
T
b
n
b
(4)
n
1
= kt
T
b
n
b
R
T
a
n
a
− kt
T
a
n
a
R
T
b
n
b
(5)
R
T
a
n
a
n
T
b
t
b
− R
T
b
n
b
n
T
a
t
a
+ k
1ab
n
1
= 0 (6)
with scalar k
1ab
= −1/k. Note that k is definitely
nonzero.
Equation 6 relates the normal correspondences
in a triplet of views (1,a,b) to each other through
the transformations [R
a
|t
a
] and [R
b
|t
b
] among those
views.
3 TOPOLOGY RECOVERY
In this section, we present our algorithm to recover
the topology of a multi-camera system by decoupling
rotations and translations.
3.1 Rotation Estimation
Rotation between two SVP cameras can be estimated
using vanishing point correspondences (Bazin et al.,
2009). We first detect vanishing points V
i
(i =
1,...,m) in all views from bundles of parallel lines
and then recover all rotations R
a
(a = 2,...,m) using
the closed-form solution proposed by Horn in (Horn,
1987).
V
a
= R
a
V
1
(7)
3.2 Translation Estimation
The trilinear relation among three views 1, a and b
in equation 6 allows the estimation of translations (t
a
and t
b
) from rotations (R
a
and R
b
) and normal cor-
respondences (n
1
, n
a
and n
b
). With an m-camera
setup, there are C
2
m−1
triplets of views (1, a,b) or tri-
linear relations where C
p
q
means the number of p-
combinations from a set of q elements. These trilinear
relations can be concatenated in a single linear sys-
tem that permits the estimation of all translation t
a
(a = 2,...,m) from rotation R
a
and normal correspon-
dences n
i
(i = 1, ...,m).
QX = 0 (8)
where Q is a 3C
2
m−1
by (3m − 3 + C
2
m−1
) matrix as
follows:
Q = [Q
1
|Q
2
]
Q
1
=
−R
T
3
n
3
n
T
2
R
T
2
n
2
n
T
3
... 0
... ... ...
0 ... −R
T
m
n
m
n
T
m−1
R
T
m−1
n
m−1
n
T
m
Q
2
= diag(n
1
,...,n
1
)
X = (t
T
2
,t
T
3
,...t
T
m
,k
123
,k
124
,...k
1(m−1)m
)
T
It can be noticed that each trilinear relation per-
mits the estimation of two translations and different
trilinear relations may contain the same translations.
However, we use all C
2
m−1
trilinear relations as they
are independent of each other. Obviously, from the
diagonal part Q
2
of matrix Q, it is impossible that a
trilinear relation is dependent on the others.
Given a line/normal correspondence n
i
in m spher-
ical views, equation 8 is a linear system in translations
t
a
(a = 2,...,m) and C
2
m−1
scalars. Each extra corre-
spondence enlarges the matrix Q by 3C
2
m−1
lines and
C
2
m−1
columns, and the unknown vector X by C
2
m−1
scalars. Therefore, n correspondences provide the fol-
lowing linear system:
ˆ
Q
ˆ
X = 0 (9)
where
ˆ
Q is a 3C
2
m−1
n by (3m−3+C
2
m−1
n) matrix and
ˆ
X = (t
T
2
,...t
T
m
,k
1
123
,...k
1
1(m−1)m
,...k
n
123
,...k
n
1(m−1)m
)
T
4 EXPERIMENTAL RESULTS
4.1 Simulated Data
Since the proposed algorithm is based on line projec-
tions in spherical images, we first create 3D lines sur-
rounding six spherical cameras C
i
(i=1,...,6) with C
1
at the origin of the coordinate system. The average
baseline among these cameras is 2000 mm and the
3D lines are at the distance of 5000 mm to 11000 mm
from the origin. These lines are mapped to spherical
images as great circles and normals. Estimation al-
gorithm in the previous section is used to recover the
transformations among these cameras. The rotation
estimation has been already evaluated in state of the
art, therefore we focus on our translation estimation
approach.
MULTI-CAMERA TOPOLOGY RECOVERY USING LINES
247
The normals are on unitary spheres, thus may be
specified by elevation and azimuth angles. Gaussian
noise of zero mean and varying standard deviations
from 0.25 to 1.00 degrees is added to two angles of
every normal. To simulate the inaccuracy in rotation
estimation, the roll, pitch and yaw angles of each rota-
tion are perturbed by Gaussian noise of zero mean and
standard deviations from 0.25 to 1.00 degrees. Figure
2 shows the average angular error of the translation
estimation after 1000 runs.
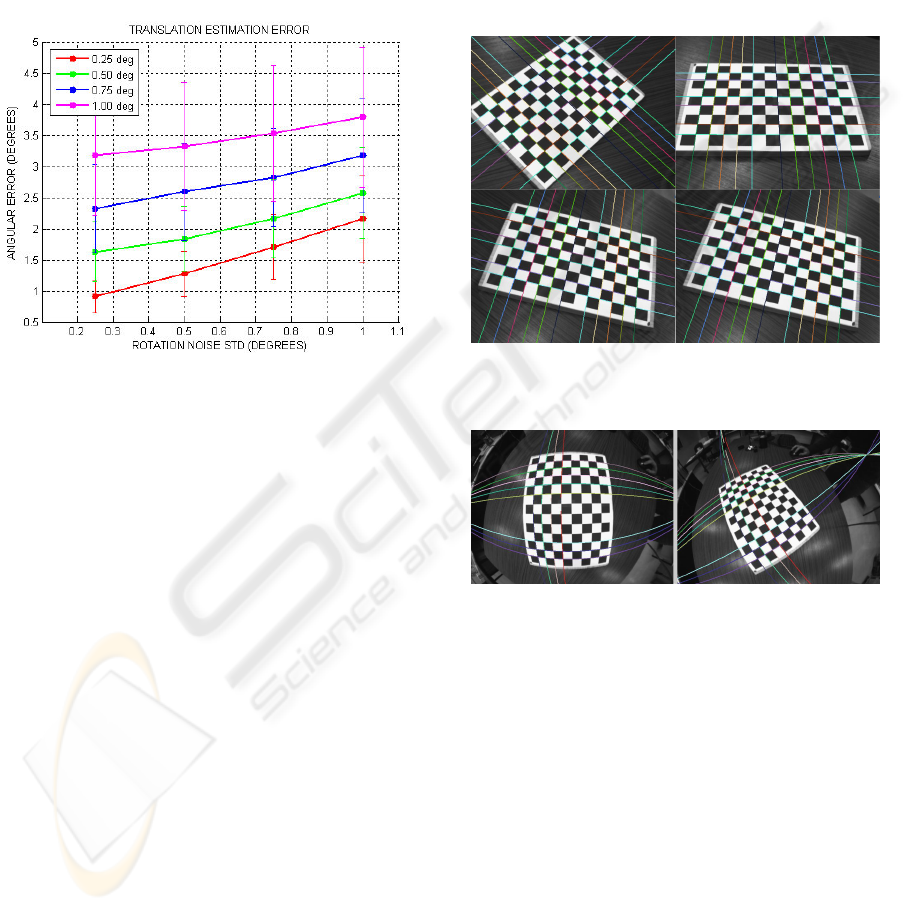
Figure 2: Translation estimation error. Normals are per-
turbed by Gaussian noise of zero mean and standard devia-
tions of 0.25, 0.50, 0.75 and 1.00 degrees (corresponding to
4 curves).
4.2 Real Data
We show in this section the topology recovery of a
multiple SVP camera system using line projections.
In order to evaluate the topology recovery algorithm,
we have used two sets of images: one captured by a
perspective camera and the other by a fisheye camera.
1. Camera calibration using the checker pattern: we
have calibrated the perspective camera using the
Camera Calibration Toolbox (Bouguet, ) and the
fisheye camera using the Omnidirectional Cali-
bration Toolbox (Mei, ). The calibration provides
not only intrinsic parameters but also extrinsic
information, i.e. transformations among camera
views which is useful for the evaluation of our es-
timation.
2. Line extraction and matching: in each image set,
we have selected six images and performed the
line detection. A fast central catadioptric line
extraction method has been proposed in (Bazin
et al., 2007). The extraction is composed of a
splitting step and a merging step in both original
and spherical images. Modifying the projection
model, we extend this approach to a line detec-
tion algorithm applicable to any SVP cameras. To
focus on our estimation that requires just a few
number of line correspondences, line matching
has been done offine and manually.
3. Topology recovery from lines: we have estimated
the transformations among six camera views us-
ing our algorithm and then compared the recovery
results with the transformations provided by the
calibration in the first step.
Figure 3: Four sample views captured by the perspective
camera with line detection and matching.
Figure 4: Two sample views captured by the fisheye camera
with line detection and matching.
Figure 3 illustrates four sample views captured by
a perspective camera and figure 4 illustrates two sam-
ple views captured by a fisheye camera. Line de-
tection and matching are also illustrated. Line cor-
respondences across multiple views are displayed in
same color.
The estimated rotations among perspective and
fisheye views are given in tables 1 and 2 respectively
in which each rotation is represented by axis and an-
gle of rotation.
The estimation error of translations among per-
spective and fisheye views is given in table 3. We have
compared the direction of each recovered translation
to the calibration data.
It can be seen from these tables that our recov-
ery algorithm provides very satisfactory results. The
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
248
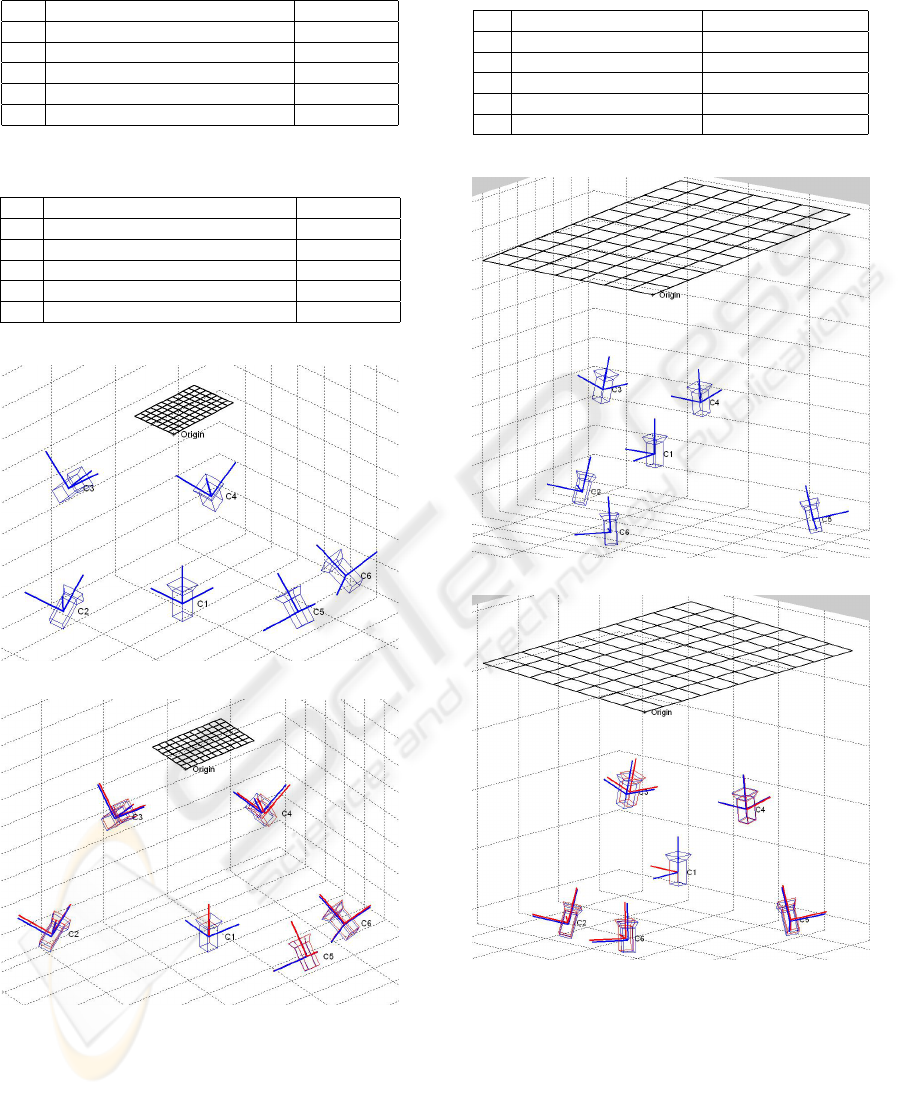
Table 1: Rotation estimation for perspective views.
R
i
Recovery: Axis, Angle (deg) Error (deg)
R
2
[-0.431,-0.391,-0.813]’,51.721 0.585
R
3
[-0.998,-0.064,-0.017]’,43.846 0.174
R
4
[-0.470,0.862,-0.189]’,36.827 0.538
R
5
[0.053,-0.333,-0.942]’,167.211 0.211
R
6
[-0.0866,0.377,0.922]’,149.417 0.304
Table 2: Rotation estimation for fisheye views.
R
i
Recovery: Axis, Angle (deg) Error (deg)
R
2
[-0.308,0.045,0.950]’,48.029 0.052
R
3
[-0.110,0.105,0.988]’,99.066 0.029
R
4
[0.060,0.096,0.994]’,89.702 0.114
R
5
[-0.026,-0.117,-0.993]’,131.643 0.075
R
6
[-0.477,-0.279,-0.833]’,38.405 0.023
(a)
(b)
Figure 5: (a) Topology recovery of perspective cameras -
(b) Comparison of our recovery result (in blue) and the ex-
trinsic calibration data (in red).
translation error is more significant than the rotation
error as the translation calculation suffers from the in-
accuracy of the rotation estimation and line detection.
Table 3: Translation estimation error for perspective (sec-
ond column) and fisheye (third column) views.
t
i
Error (deg)-Perspective Error (deg)-Fisheye
t
2
0.818 1.416
t
3
0.940 1.756
t
4
1.531 0.968
t
5
0.194 2.620
t
6
1.024 1.292
(a)
(b)
Figure 6: (a) Topology recovery of fisheye cameras - (b)
Comparison of our recovery result (in blue) and the extrin-
sic calibration data (in red).
In figures 5 and 6 are the topology recovery of
six perspective cameras and six fisheye cameras re-
spectively. We have also reconstructed the calibration
pattern. To illustrate the comparison of our topology
recovery and the extrinsic data obtained using the cal-
MULTI-CAMERA TOPOLOGY RECOVERY USING LINES
249

ibration toolbox, we display our recovery results in
blue and the extrinsic calibration results in red.
5 CONCLUSIONS
We have presented in this paper a topology recovery
approach for a setup of multiple SVP cameras. We
have validated our method using simulated data and
real images captured by perspective and fisheye cam-
eras. To recovery the transformations among central
camera views, we first estimate the rotations using
vanishing points of parallel line bundles and then the
translations from known rotations and line correspon-
dences by a linear algorithm. Using the unified pro-
jection model, this approach can be applied to a hy-
brid camera network built up from any kind of SVP
cameras. Moreover, using line feature for both rota-
tion and translation estimations, the proposed method
promises a fast transformation recovery. We have ap-
plied this method to dissimilar types of SVP cameras
and obtained very satisfied results. This would be a
good initial solution for a later non-linear phase such
as bundle adjustment to complete the reconstruction.
REFERENCES
M. E. Antone and S. J. Teller. Scalable extrinsic calibration
of omnidirectional image networks. In International
Journal of Computer Vision (IJCV), vol. 49, pp. 143-
174, 2002.
H. Bay, V. Ferrari and L.J. Van Gool. Wide-baseline stereo
matching with line segments. In Proc. IEEE Conf.
Computer Vision and Pattern Recognition (CVPR),
pp. 329-336, 2005.
J. C. Bazin, C. Demonceaux and P. Vasseur. Fast Cen-
tral Catadioptric Line Extraction. In 3rd Iberian Con-
ference on Pattern Recognition and Image Analysis
(IbPRIA, Lecture Notes in Computer Science, vol.
4478, pp. 25-32, 2007.
J.C. Bazin, C. Demonceaux, P. Vasseur and I.S. Kweon.
Motion estimation by decoupling rotation and trans-
lation in catadioptric vision. In Computer Vision and
Image Understanding (CVIU), 2009.
J. Y. Bouguet. Camera Calibration Toolbox for Matlab.
http://www.vision.caltech.edu/bouguetj/
P. David, D. Dementhon, R. Duraiswami and H. Samet.
Simultaneous pose and correspondence determination
using line features. In CVPR, vol. 2, pp. 424, 2003.
S. Gasparini and P. Sturm. Multi-view matching tensors
from lines for general camera models. In CVPR Work-
shops CVPRW ’08, pp. 1-6, 2008.
P. Gros, O. Bournez and E. Boyer. Using local planar ge-
ometric invariants to match and model images of line
segments. In CVIU, vol. 69, no. 2, pp. 135-155, 1998.
R. Hartley and A. Zisserman. Multiple view geometry in
computer vision. Cambridge University Press, 2nd
edition, 2003.
B. K. P. Horn. Closed-form solution of absolute orientation
using unit quaternions. In Journal of the Optical Soci-
ety of America. A, vol. 4, no. 4, pp. 629-642, 1987.
F. Kahl. Multiple view geometry and the L∞-norm. In Proc.
IEEE Int. Conf. Computer Vision (ICCV), pp. II: 1002-
1009, 2005.
F. Kahl and R. Hartley. Multiple-View Geometry Under the
L
∞
-Norm. In IEEE Trans. Pattern Analysis and Ma-
chine Intelligence (PAMI), vol. 30, pp. 1603-1617,
2008.
J.H. Kim and R. Hartley. Translation estimation from om-
nidirectional images. In Digital Image Computing:
Techniques and Applications (DICTA), pp. 22, 2005.
S. Mahamud and M. Hebert. Iterative projective reconstruc-
tion from multiple views. In CVPR, vol. 2, pp. 430-
437, 2000.
D. Martinec and T. Pajdla. Robust Rotation and Translation
Estimation in Multiview Reconstruction. In CVPR,
pp. 1-8, 2007.
C. Mei. Laser-augmented omnidirectional vision for 3D lo-
calisation and mapping. PhD Thesis, INRIA Sophia
Antipolis, 2007.
C. Mei. Omnidirectional Calibration Toolbox.
http://www.robots.ox.ac.uk/∼cmei/Toolbox.html
C. Olson, L. Matthies, M. Schoppers and M. Maimone. Ro-
bust stereo ego-motion for long distance navigation.
In CVPR, vol. 2, pp. 453-458, 2000.
K. Sim and R. Hartley. Recovering camera motion using the
L∞-Norm. In CVPR, pp. 1230-1237, 2006.
P. Sturm and B. Triggs. A factorization based algorithm for
multi-image projective structure and motion. In Proc.
European Conference on Computer Vision (ECCV),
pp. 709-720, 1996.
C. Tomasi and T. Kanade. Shape and motion from image
streams under orthography: a factorization method. In
IJCV(9), no. 2, pp. 137-154, 1992.
A. Torii, A. Imiya and N. Ohnishi. Two- and three- view
geometry for spherical cameras. In Proc. IEEE Work-
shop on Omnidirectional Vision (OMNIVIS05).
B. Triggs, P.F. McLauchlan, R.I. Hartley and A.W. Fitzgib-
bon. Bundle Adjustment - A Modern Synthesis. In
ICCV, pp. 298-372, 1999.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
250
