
TOWARDS AUTOMATED CROP YIELD ESTIMATION
Detection and 3D Reconstruction of Pineapples in Video Sequences
Supawadee Chaivivatrakul, Jednipat Moonrinta and Matthew N. Dailey
School of Engineering and Technology, Asian Institute of Technology, Pathumthani, Thailand
Keywords:
Object detection, Keypoint detection, Keypoint descriptors, Keypoint classification, Image segmentation,
Structure from motion, 3D reconstruction, Ellipsoid estimation, Pineapple, Mobile field robot, Agricultural
automation.
Abstract:
Towards automation of crop yield estimation for pineapple fields, we present a method for detection and 3D
reconstruction of pineapples from a video sequence acquired, for example, by a mobile field robot. The detec-
tion process incorporates the Harris corner detector, the SIFT keypoint descriptor, and keypoint classification
using a SVM. The 3D reconstruction process incorporates structure from motion to obtain a 3D point cloud
representing patches of the fruit’s surface followed by least squares estimation of the quadric (in this case an
ellipsoid) best fitting the 3D point cloud. We performed three experiments to establish the feasibility of the
method. Experiments 1 and 2 tested the performance of the Harris, SIFT, and SVM method on indoor and
outdoor data. The method achieved a keypoint classification accuracy of 87.79% on indoor data and 76.81%
on outdoor data, against base rates of 81.42% and 53.83%, respectively. In Experiment 3, we performed 3D
reconstruction from indoor data. The method achieved an average of 34.96% error estimating the ratio of the
fruits’ major axis to short axis length. Future work will focus on increasing the robustness and accuracy of the
3D reconstruction method as well as resolving the 3D scale ambiguity.
1 INTRODUCTION
Agricultural automation has the potential to improve
farm yields, improve crop quality, and lower produc-
tion costs. In particular, autonomous in-field inspec-
tion of fruit fields could improve farmers’ ability to
track crops over time, plan maintenance and harvest-
ing activities, and predict yield. We are interested in
developing autonomous inspection robots for pineap-
ple farms that use low-cost cameras and machine vi-
sion to isolate and grade the fruit while it is still in
the field. We focus here on the related problems of 1)
segmenting a video to find the pineapple fruit in the
field, and 2) obtaining 3D models of detected fruits.
In segmentation, the first main challenge is that
since the plants are tightly spaced, we cannot typ-
ically see all of a particular fruit, ruling out shape-
based methods. Second, since pineapples often have
a similar color to the rest of the plant, we cannot rely
on color. We thus rely on texture. We use the fast
Harris algorithm (Harris and Stephens, 1988) to find
corner points then apply the SIFT descriptor (Lowe,
2004) to those detected points. We then classify the
descriptors using a SVM (Support Vector Machine).
For 3D modeling, we combine the pineapple de-
tector with 3D point cloud estimation using well
known structure from motion techniques (see, e.g.,
Pollefeys et al., 2004), and then we perform least-
squares estimation of the quadric (in this case an el-
lipsoid) best fitting the 3D point cloud. Our current
method is not robust to outlier points and does not
resolve the scale ambiguity of the 3D reconstruction
(future work will address these limitation), but the
method does provide useful information about fruit
orientation and shape.
The experiments establish the feasibility of using
texture to segment pineapples in video sequences and
using structure from motion to reconstruct pineapple
shape. This work is a step towards fully automatic
crop yield by mobile field robots.
2 METHODOLOGY
Our methodology consists of frame selection, image
segmentation, and 3D reconstruction from the point
cloud. In our current prototype, we select two views
of each fruit in a video sequence manually. However,
180
Chaivivatrakul S., Moonrinta J. and N. Dailey M. (2010).
TOWARDS AUTOMATED CROP YIELD ESTIMATION - Detection and 3D Reconstruction of Pineapples in Video Sequences.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 180-183
DOI: 10.5220/0002838201800183
Copyright
c
SciTePress

we plan to perform automated key frame selection in
future work. We detail each of the other steps in turn.
2.1 Image Segmentation
Our segmentation algorithm consists of keypoint ex-
traction, keypoint descriptor calculation, keypoint
classification, and morphological operations to re-
trieve the fruit region in a given image.
We use the Harris corner detector (Harris and
Stephens, 1988) to find candidate keypoints over the
whole image, since images of a pineapple’s surface
have many points with corner-like structure. We find
that in practice, the Harris detector tends to find fairly
dense sets of keypoints on pineapple image regions
that are very useful for reconstructing 3D point clouds
representing the fruit surface.
Classifying the keypoints as pineapple and non-
pineapple points requires a rich description of the lo-
cal texture surrounding the keypoint. We compute
SIFT descriptors (Lowe, 2004) (a 128-element vec-
tor) for the high-gradient Harris keypoints that are not
too close to image boundaries.
We use support vector machines (SVM) to clas-
sify keypoints as pineapple or non-pineapple. In other
work, we have performed experiments on SIFT key-
point descriptor classfication using a variety of SVM
kernels and hyperparameter settings, and we find that
the radial basis function (RBF) kernel has the best
overall performance. Here we use RBFs with a cross-
validated grid search over hyperparameter settings to
find the best hyperparameter settings.
For segmentation, we find contiguous pineap-
ple regions using morphological closing to connect
nearby pineapple points then remove regions smaller
than 25% of the expected fruit area, based on assump-
tions of image resolution and distance to the camera.
2.2 3D Reconstruction
To obtain 3D point clouds from candidate pineap-
ple image regions, we find point correspondences be-
tween image pairs and then apply standard algorithms
from the structure from motion literature, as described
in the following sections.
The first step is feature point extraction. Once
pineapple regions have been identified in a pair of im-
ages of the same fruit, we extract SURF (Bay et al.,
2008) feature points from those regions. Although the
Harris corner detector and the SIFT keypoint descrip-
tor work well for image segmentation, we find that
the standard SURF algorithm gives us more reliable
correspondences for 3D point cloud reconstruction.
To find point correspondences between two im-
ages, we find, for each keypoint descriptor in one
image, the most similar descriptor in the other im-
age. We use the dot product similarity measure with
a threshold to find the most likely corresponding key-
point in one image for each keypoint in the other.
To remove outliers in the resulting set of puta-
tive correspondences, we use the adaptive RANSAC
method for fundamental matrix estimation (Hartley
and Zisserman, 2004) to find the best fundamental
matrix and correspondence consensus set, removing
outliers inconsistent with the epipolar geometry. The
remaining inlier points are used for 3D point cloud
estimation.
The next step is 3D point cloud estimation. We as-
sume that the camera’s intrinsic parameters are fixed
and given as a calibration matrix K. We next estimate
camera matrices for the two images, using the essen-
tial matrix method (Hartley and Zisserman, 2004).
Once two camera matrices are known, we com-
pute linear estimates of all of the 3D points then
refine those estimates using nonlinear least squares
(Levenberg-Marquardt).
In a real field, we cannot rotate the pineapple or
move the camera to get a complete view of the fruit.
Therefore, we must estimate the fruit’s shape from a
partial view. We propose an algorithm for reconstruct-
ing the 3D shape of a pineapple from a 3D point cloud
estimated from a partial view of the fruit’s surface.
Since pineapples are nearly ellipsoidal, we model
each fruit as an ellipsoid and perform least squares
estimation of the ellipsoid’s parameters to fit the point
cloud data estimated in the previous step. Using Li
and Griffiths’ (2004) method, we actually estimate the
quadric
Q =
a h g p
h b f q
g f c r
p q r d
(1)
defining X
T
QX = 0 using least squares.
Once the best-fitting ellipsoidal quadric Q is
found, we extract the ellipsoid’s center, orientation,
and axis radii.
3 EXPERIMENTAL RESULTS
To evaluate our methods, we performed three exper-
iments: fruit segmentation on indoor data, fruit seg-
mentation on outdoor data, and 3D fruit reconstruc-
tion. The 3D reconstruction experiment was only ap-
plied to indoor data.
TOWARDS AUTOMATED CROP YIELD ESTIMATION - Detection and 3D Reconstruction of Pineapples in Video
Sequences
181

Table 1: Distribution of training and test keypoints for in-
door and outdoor segmentation.
Data set Number of Fruit Positive Instances
Indoor Outdoor
Training 20 88.76% 35.48%
Test 10 81.42% 46.17%
Table 2: SVM keypoint classification accuracy for indoor
and outdoor segmentation.
Model type Data set Accuracy
Indoor Outdoor
Cross- Training 97.76% 99.85%
validation Validation 93.86% 82.64%
Final Training 97.67% 99.80%
Test 87.79% 76.81%
3.1 Segmentation
In Experiment 1, we captured indoor videos of 30
pineapples from a distance of approximately 30 cen-
timeters. We chose one frame from each video and
split the data into 20 training and 10 test images.
For every image, we applied the Kovesi implemen-
tation of the Harris corner detector (Kovesi, 2000)
with a Gaussian smoothing standard deviation of 0.5,
a threshold of 1, and a non-maximum suppression ra-
dius of 2. We then extracted SIFT descriptors for the
Harris corner points by modifying an open implemen-
tation of SIFT (Vedaldi, 2006) using 4 scales and 8
orientations. The distribution of positive (pineapple)
and negative (background) keypoints over the training
set and test set is shown in Table 1.
We then built SVM models with the RBF kernel
using LIBSVM (Chang and Lin, 2001). The RBF
kernel based SVM requires two hyperparameters, c,
which controls the tradeoff between training error and
model complexity, and γ, which controls the width of
the RBF kernel. We used a grid search and 5-fold
cross validation within the training set to find optimal
values of c and γ then used the best parameters to train
a final model on all of the training data then used the
resulting model to classify the test set.
The best parameter setting for the indoor data was
(c = 2
2
, γ = 2
0
). Accuracy data for the classifiers are
shown in Table 2, and a sample of the results is shown
in Figure 1.
In Experiment 2, we performed the same steps
on data acquired outdoors. In the outdoor data,
there were many more negative keypoints due to the
complex background and occlusions (Table 1). The
best parameter setting for the outdoor data was (c =
2
1.5
, γ = 2
1.75
).
After classifying points as lying on the pineap-
Figure 1: Sample SVM classification results, the green cir-
cle is pineapple point.
(a) (b)
Figure 2: Pineapple segmentation and SURF feature points.
(a) Result of closing operation to obtain pineapple region.
(b) SURF feature points in the pineapple region.
ple surface, we performed morphological closing with
a disk-shaped structuring element of radius 30 using
Matlab’s image processing toolbox (The Mathworks,
2007). A sample of the results is shown in Figure
2(a) We performed further processing on connected
regions containing 20,000 or more pixels (at 30 cm,
with our camera, the visible pineapple surface region
typically contains approximately 80,000 pixels).
3.2 3D Reconstruction
In Experiment 3, we next applied Strandmark’s
(2008) Matlab port of the SURF reference implemen-
tation to the pineapple region detected in each image.
A sample of the feature points we obtained is shown
in Figure 2(b). Sample results from our structure
from motion stream (matching and outlier detection,
point cloud estimation, a Delaunay triangulation of
the point cloud, and an estimated ellipsoid) are shown
in Figures 3–4. A quantitative evaluation of the el-
lipsoid estimation is presented in Table 3. We found
that the outdoor pineapple data had too many outlier
points for accurate ellipsoid estimation, so the data in
Table 3 are only for our indoor data.
4 CONCLUSIONS AND
DISCUSSION
Our experiments demonstrate the feasibility of the
proposed methods. The SVM model for pineap-
ple keypoint classification achieves an accuracy of
87.79% for indoor data, which is sufficient, with post
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
182
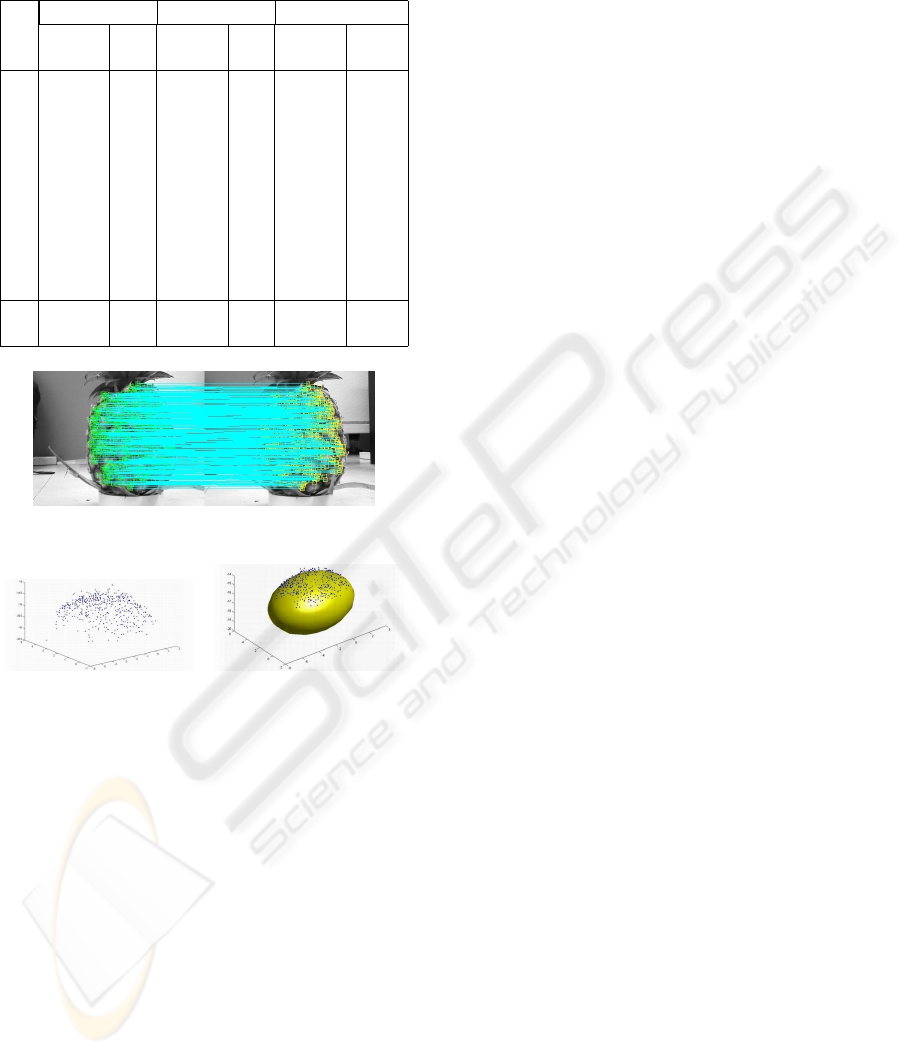
Table 3: Ratios of medium axis length to major axis length
and short axis length to major axis length for actual fruit
and estimated ellipsoids.
Fruit Ellipsoid Error
No. medium/short/medium/short/medium/ short/
major major major major major major
1 0.83 0.83 0.71 0.58 14.46% 30.62%
2 0.96 0.96 0.66 0.58 31.54% 40.07%
3 0.85 0.85 0.65 0.53 23.41% 37.28%
4 0.84 0.84 0.69 0.57 18.66% 32.69%
5 0.88 0.88 0.73 0.58 17.04% 34.46%
6 0.85 0.85 0.72 0.58 15.57% 31.92%
7 0.86 0.86 0.63 0.53 26.30% 38.17%
8 0.89 0.89 0.71 0.60 19.99% 32.20%
9 0.83 0.83 0.67 0.56 19.39% 32.88%
10 0.88 0.88 0.65 0.54 25.96% 39.34%
Ave-
rage 0.87 0.87 0.68 0.56 21.23% 34.96%
Figure 3: Feature point matching after outlier removal with
RANSAC.
(a) (b)
Figure 4: Sample 3D reconstruction results. (a) 3D point
cloud reconstructed from the inlier points in Figure 3. (b)
Estimated ellipsoid.
processing, to accurately segment pineapple and non-
pineapple regions. The SURF keypoints computed for
these regions enable 3D point cloud estimation with
sufficient accuracy in most cases to estimate an el-
lipsoid with roughly accurate dimensions. In future
work, we will focus on increasing the robustness of
the method and resolving the 3D scale ambiguity, and
perform experiments with real field robots.
ACKNOWLEDGEMENTS
SC was supported by a graduate fellowship from the
Thailand National Science and Technology Develop-
ment Agency (NSTDA). Apisit Aroonnual helped de-
velop the ellipsoid fitting software. We thank Anupun
Terdwongworakul, Paul Janecek, and the members
of the AIT Vision and Graphics Lab for useful com-
ments on the work.
REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (SURF). Computer Vision
and Image Understanding, 110:346–359.
Chang, C.-C. and Lin, C.-J. (2001). LIBSVM: a li-
brary for support vector machines. Available at
http://www.csie.ntu.edu.tw/ cjlin/libsvm.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. In Proceedings of The Fourth Alvey
Vision Conference, pages 147–151.
Hartley, R. and Zisserman, A. (2004). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
second edition.
Kovesi, P. (2000). MATLAB and Octave functions for
computer vision and image processing. School
of Computer Science & Software Engineering,The
University of Western Australia. Available at
http://www.csse.uwa.edu.au/ pk/research/matlabfns/.
Li, Q. and Griffiths, J. G. (2004). Least squares ellipsoid
specific fitting. In Proceedings of the Geometric Mod-
eling and Processing Conference. IEEE Computer So-
ciety.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60:91–110.
Pollefeys, M., van Gool, L., Vergauwen, M., Verbiest, F.,
Cornelis, K., Tops, J., and Koch, R. (2004). Vi-
sual modeling with a hand-held camera. International
Journal of Computer Vision, V59.
Strandmark, P. (2008). SURFmex [open source software].
Available at http://www.maths.lth.se/matematiklth/
personal/petter/surfmex.php.
The Mathworks (2007). Image processing toolbox user’s
guide. Technical report.
Vedaldi, A. (2006). An implementation of SIFT detec-
tor and descriptor. Available at http://www.vlfeat.org/
∼vedaldi/assets/sift/sift.pdf.
TOWARDS AUTOMATED CROP YIELD ESTIMATION - Detection and 3D Reconstruction of Pineapples in Video
Sequences
183
