
PR
OBABILISTIC AWARD STRATEGY FOR CONTRACT NET
PROTOCOL IN MASSIVELY MULTI-AGENT SYSTEMS
Toshiharu Sugawara
∗
Computer Science and Engineering, Waseda University, Tokyo 169-8555, Japan
Toshio Hirotsu
Computer and Information Sciences, Hosei University, Tokyo 184-8584, Japan
Kensuke Fukuda
National Institute of Informatics, Tokyo 101-8430, Japan
Keywords:
Task and resource allocation, Load-balancing, Massively multiagent systems, Contract net protocol.
Abstract:
We propose a probabilistic award selection strategy for a contract net protocol (CNP) in massively multi-agent
systems (MMASs) for effective task allocations. Recent Internet and sensor network applications require so-
phisticated multi-agent system technologies to enable the large amounts of software and computing resources
to be effectively used. Improving the overall performance of MMASs in which thousands of agents work
concurrently requires a new negotiation strategy for appropriately allocating tasks to agents. Our proposed
method probabilistically selects the awardee in CNP based on the statistical difference between bid values for
subtasks that have different costs. We explain how our proposed method can significantly improve the overall
performance of MMASs.
1 INTRODUCTION
Recent advances in many domains, such as the In-
ternet, sensor networks, and grid computing, (Foster,
2002), have increased the need for technologies for
massively multi-agent systems (MMASs), in which
thousands of agents interact with one another. In par-
ticular, a technology is needed for allocating tasks
generated in real time to appropriate agents in accor-
dance with their skills and abilities so that the abili-
ties/resources of all agents are maximally used. Task
allocation has thus attracted a great deal of attention
in multi-agent systems for the purpose of obtaining
efficient and high-quality services.
A number of negotiation protocols have been pro-
posed for task allocation and the contract net pro-
tocol (CNP)(Smith, 1980) has especially been im-
∗
This
research was supported in part by Kayamori Foun-
dation of Information Science Advancement and Grant-in-
Aid for Scientific Research from the Japan Society for the
Promotion of Science.
plemented in various applications (Sandholm, 1993;
Weyns et al., 2006). In CNP, an agent plays one
of two roles: managers are responsible for allocat-
ing tasks and monitoring processes and contractors
are responsible for executing the allocated tasks. A
manager agent makes a task known to the contractor
agents in the announcement phase, and they then bid
for the task on the basis of certain values (such as cost,
duration, or payment) in the bid phase. The manager
awards the contractor (or awardee) who made the best
bid in the award phase. There have been a number of
studies in which the performance and characteristics
of CNP have been investigated (e.g. (Gu and Ishida,
1996)). However, most have assumed CNP in small-
scale, less busy environments.
Unfortunately, the performance of CNP in an
MMAS is poorly understood. Clarifying this is im-
portant because interference among agents occurs
with this kind of negotiation protocol if many man-
agers have tasks to allocate. In naive CNP, a contrac-
tor agent responds to task announcements one by one,
165
Sugawara T., Hiortsu T. and Fukuda K. (2010).
PROBABILISTIC AWARD STRATEGY FOR CONTRACT NET PROTOCOL IN MASSIVELY MULTI-AGENT SYSTEMS.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 165-171
DOI: 10.5220/0002712201650171
Copyright
c
SciTePress

but because many managers announce tasks simulta-
neously in a busy MMAS, the managers may have to
wait a long time to receive a sufficient number of bids:
This significantly reduce the performance of the entire
system. In the original conception of CNP (Smith,
1980), the use of multiple bids was proposed to con-
currently handle many announcements. If a contrac-
tor is awarded multiple bids simultaneously, however,
it may not be able to provide the quality or perfor-
mance guaranteed in the bids. In fact, more highly
capable contractor agents tend to be selected by many
managers. Additionally, the task structure, meaning
a task consisting of a number of different subtasks,
makes this situation more complex.
In this paper, we propose the award strategy,
called the adaptive probabilistic award strategy, to
improve the overall performance of MMAS. The first
key idea of the proposed strategy is the probabilis-
tic selection of awardee according to the task loads
of the system. However, the task loads of the system
are hardly given to each agent. Thus the second idea
is that manager agents estimate the task loads using
statistical data (more precisely, the difference in the
standard deviation – SD) of bid values for different
subtasks, where we assume that a task consists of a
number of subtasks that have different costs.
This paper is organized as follows. First, we will
discuss the model of CNP, which has been slightly
modified for MMASs to avoid long waits and to re-
duce the number of messages, the simulation environ-
ment and the issues addressed in this paper. Then, we
clarify how some degree of fluctuation can improve
the overall performance even if tasks have structures
and, by taking advantage of this effect, we propose
the adaptive probabilistic award strategy. Finally, we
experimentally show how our proposed method can
significantly improve overall performance.
2 MODEL AND ISSUES
2.1 Model of CNP for Massively MASs
Let A = {1,...,n} be a set of agents, T be a task,
and F = { f
1
,.. ., f
d
} be the set of skills, or func-
tions that agents can perform. We assume that task
T consists of subtasks, t
1
,.. .,t
l
, (therefore, we de-
note T = {t
1
,.. .,t
l
}) and that subtask t(∈ T ) requires
s(t)-th skill, f
s(t)
, to perform it, where 1 ≤ s(t) ≤ d.
A subtask is denoted by lower-case letter t and is
simply called a task unless this creates confusion.
Agent i is expressed as a tuple, (α
i
,L
i
,S
i
,Q
i
), where
α
i
= (a
1
i
,.. ., a
d
i
) is the set of the agent’s capabilities
(a
l
i
corresponds to the l-th skill, f
l
, and a
l
i
≥ 0; a
l
i
= 0
indicates agent i does not have skill f
l
), L
i
is the loca-
tion of i, and Q
i
is the queue where the agent’s tasks
are stored, waiting to be executed one by one. Set
S
i
(⊂ A) is i’s scope, i.e., the set of agents that i knows.
The metric between agents, δ(i, j), is based on their
locations, L
i
and L
j
, and is used to define the commu-
nication time (or delay) of messages between i and
j.
Subtask t has an associated cost, γ(t), which is the
cost to complete it. Subtask t can be done by i in
dγ(t)/a
s(t)
i
e unit times, where dxe denotes the ceiling
function. This time is also called the execution time
of t by i. Task T is completed when all its subtasks
are completed. The cost of T is defined as γ(T ) =
∑
t∈T
γ(t).
In every unit time, tl(≥ 0) tasks on average are
generated according to a Poisson distribution and ran-
domly assigned to different managers. Parameter tl is
called the task load and denotes tl tasks per unit time,
or simply tl T/t.
For CNP, we defined M = {m
j
}(⊂ A) as the set
of managers, who allocate tasks, and C = {c
k
}(⊂ A)
as the set of contractors, who execute the allocated
tasks. Let us assume that |A| is large (on the order of
thousands), therefore |M | and |C | are also large, and
that the agents are distributed widely, like servers on
the Internet.
2.2 Task Allocations for MMAS
In our experiments, we used the CNP modified for use
in an MMAS to reduce the number of messages and
to prevent long waits for a response. In this CNP, (1)
multiple bids and regret and no-bid messages are al-
lowed, and (2) manager m announces subtasks in T to
restricted contractors that are selected from its scope,
S
m
, on the basis of an announcement strategy. Regret
messages are sent in the award phase to contractors
who have not been awarded the contract; no-bid mes-
sages are sent to managers by contractors who have
decided not to bid on an announced task. These mes-
sages prevent long waits for bids and award messages
(e.g., (Sandholm, 1993; Xu and Weigand, 2001)).
When manager m receives task T , it immediately
initiates the modified CNP to allocate each task
˜
t(∈
T ) to an appropriate contractor agent. It first sends
announcement messages to the contractors selected
from its scope in accordance with the announcement
strategy. Each contractor receiving the announcement
sends back a bid message with a certain value called
the bid value. The bid values in general might include
parameters such as the price for executing the task, the
quality of the result, or a combination of these values.
Because we assume that agents are rational in terms
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
166

of efficiency, their bid values contain the guaranteed
times for completing the task. Thus, the bid value
of contractor c is dγ(
˜
t)/a
s(
˜
t)
c
e +
∑
t∈Q
c
dγ(t)/a
s(t)
c
e + β,
where β is the time required to complete the task cur-
rently being executed. With multiple bidding, c might
have a number of outstanding bids. These bids are not
considered because it is uncertain whether they will
be accepted. Finally, manager m selects a contrac-
tor, the awardee, on the basis of the award selection
strategy, and sends the awardee a message with the
announced task. The awardee is usually the one that
make the best bid (here, the lowest value).
2.3 Issue
We assume that manager agents can observe, for each
subtask, the completion time, which is the elapsed
time from the time the award message was sent to
the time the message indicating that the task has been
completed was received. The completion time thus
includes the communication time in both directions,
the queue time, and the execution time. The overall
efficiency of an MMAS is defined as the average com-
pletion time observed for all managers; as this value
is used to evaluate the system’s performance, it is re-
ferred to as the overall performance. The issue we
addressed here was to investigate the overall perfor-
mance of an MMAS under a number of award strate-
gies and to improve it by combining the advantages
of a number of award strategies.
From the viewpoint of the overall performance of
a MMAS, we have already tackled this issue and in-
vestigated the performance of an MMAS, especially
its overall efficiency, when tasks were allocated using
CNP with a variety of manager-side controls in the an-
nouncement and award phases, under the assumption
that all agents were cooperative and rational in terms
of efficiency (therefore, their bid values contained
estimated times for completing the task)(Sugawara
et al., 2008a; Sugawara et al., 2008b). This assump-
tion is reasonable because timely responses are al-
ways of great concern in interactive and realtime ser-
vices. We then found that by introducing a small fluc-
tuation in the award phase of CNP according to the
task loads the overall performance could considerably
be improved. However, because they assumed that a
task had no structure, i.e., a task consisted of a single
subtask, their model could only be applied to limited
applications.
Thus, we aim to extend this approach to more gen-
eral tasks that have a certain task structure. The ex-
tension of the method proposed in (Sugawara et al.,
2008a; Sugawara et al., 2008b) is not trivial. The key
information to apply their method is the overall task
load in the environment and this was estimated from
queue lengths that were directly announced by local
contractors. Queue lengths cannot, however, correctly
indicate the workload in general if tasks consist of a
number of different subtasks, because the queued sub-
tasks do not involve the same costs.
2.4 Simulation Environment
We set |C | = 500 and |M | = 10,000 in our simu-
lation. We assumed that the contractor agents were
servers running on the Internet, providing services
requested by manager agents, which correspond to
clients in users’ sides. The agents were randomly
placed on a 150 × 150 grid with a torus topology. The
Manhattan distance between agents i and j was intro-
duced as the metric. The communication time ranged
from 1 to 14 (in ticks, the unit of time in the simula-
tion), in proportion to the value of δ(i, j).
For simplicity, let us first assume that T = {t
1
,t
2
}
where γ(t
1
) = 2500 and γ(t
2
) = 500. Contractor c
i
was assigned different capabilities so that the values
of γ(t
1
)/a
1
c
i
(c
i
∈ C ) were uniformly distributed over
the range 20–100. Since γ(t
1
) = 2500, the values of
a
1
c
i
ranged from 25 to 125. We also assumed that man-
ager agents could not do the tasks (a
1
m
= a
2
m
= 0) (so
they had to assign the tasks to agents who could), and
that a
1
c
i
= a
2
c
i
; this means that a high-performance PC
can execute any task effectively (if the functions are
defined).
The results presented here are the mean values
from nine independent trials. In these trials, the max-
imal numbers of being executed T every tick, which
were derived from the cumulative capabilities of all
contractors
∑
c∈C
a
c
, ranged from 8.15 to 8.30 T/t,
with an average of 8.25 T/t. This is the theoretical
upper limit, meaning that if the task allocation was
ideal, they could execute 8.25 tasks every tick.
When contractor c was awarded a task, it imme-
diately executed it if it had no other tasks. If c was
already executing a task, the new task was stored in
Q
c
. The tasks in the queue were executed in turn. The
queue length can be finite or infinite, and we assumed
that it was infinite in this paper.
2
Manager m’s scope, S
m
, consists of the nearest
50 or more contractors according to this distance.
More precisely, for integer n > 0, let S
m
(n) = {c ∈
2
If the queue is finite, a number of tasks are dropped
when agents are busy, but this enables agents to recover
from the busy state. However, we aims at investigating the
overall performance by appropriate task allocations (load-
balancing), we@ daringly assume that the queue length is
infinite. Note that the characteristics described in this paper
are almost identical to those when this is finite.
PROBABILISTIC AWARD STRATEGY FOR CONTRACT NET PROTOCOL IN MASSIVELY MULTI-AGENT
SYSTEMS
167
-40
-30
-20
-10
0
10
20
30
0 10000 20000 30000 40000 50000 60000 70000 80000 90000 100000 110000 120000 130000 140000 150000 16000
0
VA S
PAS
3
PAS
6
time (ticks)
Improvement ratio (%)
0.1
0.5 1 2 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 9 9 8 7.5 7 6.5 6 5.5 5 4.5 4 3.5 3 2 1 0.5 0.1
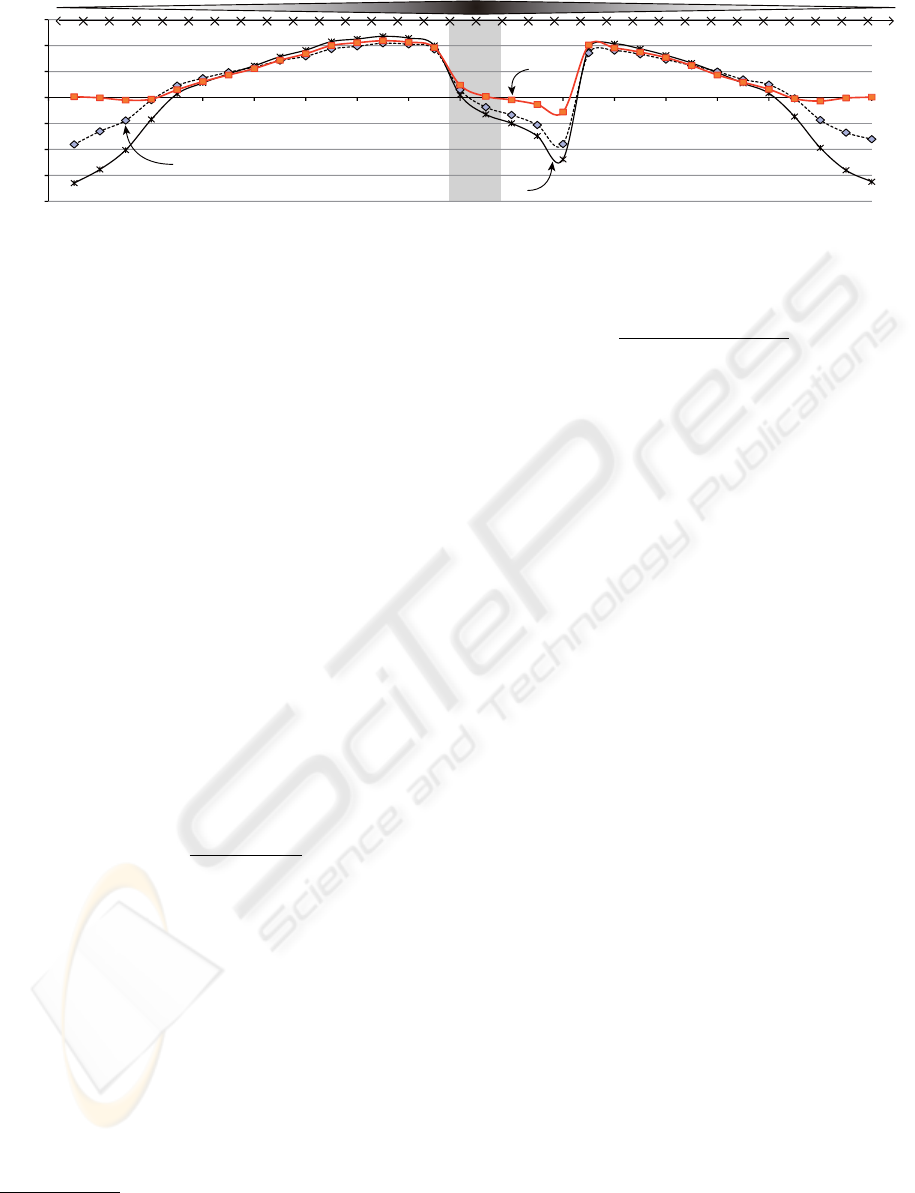
Figure 1: Ratios of completion times under PAS
k
(k=3 or 6) and VAS.
C|δ(m, c) ≤ n}. Then, it follows that S
m
(n) ⊂ S
m
(n +
1). S
m
is defined as the smallest S
m
(n), such that
|S
m
(n)| ≥ 50. Then, we fixed the announcement strat-
egy in which m announced tasks to only 20 contrac-
tors
3
who were randomly selected from S
m
.
3 EFFECT OF PROBABILISTIC
AWARDING
(Sugawara et al., 2008a) reported that some degree of
fluctuation in the award phase could improve overall
performance when a task had no structure. Our ob-
jective of the first experiment to verify this effect oc-
curred when a task consisted of a number of subtasks.
After a task is announced, manager m would re-
ceive bids from a number of contractors, {c
1
,.. ., c
p
}.
We denote the bid value from contractor c
i
as b(c
i
).
In naive CNP, m selects the contractor who submitted
the best (lowest) bid. In our first award strategy, the
awardee is selected according to the following proba-
bility:
Pr(c
i
) =
1/b(c
i
)
k
∑
p
j=1
1/b(c
j
)
k
. (1)
This probabilistic award selection strategy is denoted
by PAS
k
. Variable k is called the fluctuation factor.
The larger the k, the smaller the degree of fluctua-
tion; PAS
0
and PAS
∞
correspond to “random selec-
tion” and “no randomness.” Therefore, PAS
∞
is the
award strategy in the naive CNP.
We evaluated the overall performance for task
load, tl, gradually increasing it from 0.1 (idle) to 9
(extremely busy, over the cumulative capabilities) ev-
ery 5-K ticks and then returning to 0.1. The total du-
ration was 160-K ticks. We plotted the improvement
ratios from PAS
k
to PAS
∞
(= CNP), which was calcu-
3
The overall performance varied depending on this num-
ber and was mostly optimal when it was 20. The details
have been reported in (Sugawara et al., 2007).
lated using
I
CNP
(PAS
k
) =
℘(PAS
∞
) −℘(PAS
k
)
℘(PAS
∞
)
× 100, (2)
where ℘(str) indicates the overall performance when
award selection strategy str is used.
The results are plotted in the curves labeled
“PAS
3
” and “PAS
6
” in Fig. 1. The task loads over
time are also given in this figure. The gradated
“javelin” above the graph also illustrates the varied
task loads. The gray area in Fig. 1 indicates the pe-
riod in which the task load exceeds the cumulative
capabilities. These curves indicate that (1) when tl
is low (very few multiple awards occur) or tl is quite
large (over the theoretical limit of cumulative capabil-
ity), PAS
∞
is better than the others (PAS
k
may worsen
this by 35%), but (2) otherwise PAS
k
(k = 3 or 6) can
improve the overall efficiency by as much as 25%.
This also clearly demonstrates the appropriate degree
of fluctuation depends on the task load, tl. That is,
when tl ≤ 4, PAS
6
is better than PAS
3
but vice versa
when 4 < tl ≤ 7.5. Note that the center of the curves
in Fig. 1 have shifted slightly to the left because of
the effect of the delayed execution of tasks queuing
during the overload situation.
4 PROPOSED STRATEGY
4.1 Adaptive Probabilistic Awarding
The experiments discussed in the previous section in-
dicate that the fluctuation factor should adaptively be
controlled according to the system’s task loads to uti-
lize the capabilities of a MMAS. However, it is impos-
sible to assess the system’s task load, because this is
a kind of non-local information. Instead, (Sugawara
et al., 2008a) estimated the task load of the MMAS
from the queue length of contractors. However, this
cannot be simply applied to our case, because if the
queue is long but the costs of queuing tasks are small,
agents cannot conclude whether the system is busy.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
168
Our idea to this issue is to estimate situations by
statistically analyzing the bid values from local con-
tractors. More precisely, we used the differences be-
tween the standard deviations (SDs) of bid values
for different tasks that had different costs. Assume
that, for announced task t, manager m received bids
whose values are B
m
(t) = {b
1
(t),b
2
(t),. .. }, and the
SD of B
m
(t) is denoted by SD
m
(t). Let D
SD
m
(T ) be
|SD
m
(t
1
) − SD
m
(t
2
)|, when T = {t
1
,t
2
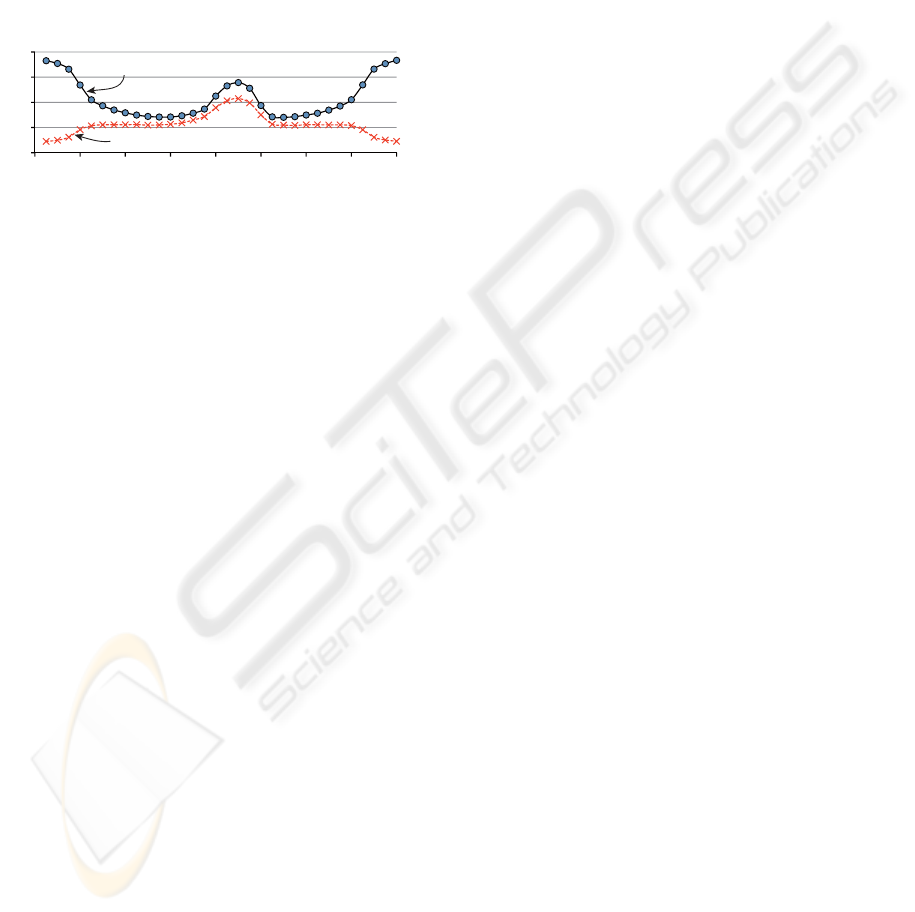
}. Figure 2
shows how the average values and the standard de-
viation of D
SD
(T ) vary over time.
0
5
10
15
20
0 20000 40000 60000 80000 100000 120000 140000 160000
Standard deviations of D (
T
)
Average values of D (
T
)
SD
SD
Figure 2: Average values and SDs of D
SD
m
(T ) over time.
Comparing Figs. 1 and 2, D
SD
m
(T ) can be used as
the key to determining the degree of fluctuation; more
precisely, the fluctuation factor k is established by us-
ing the following strategy,
k = ∞ if D
SD
m
(T ) ≥ 12.0,
k = 6 if 12.0 > D
SD
m
(T ) ≥ 8.8, (3)
k = 3 if D
SD
m
(T ) < 8.8.
This is called the variable award strategy and is de-
noted by VAS in this paper. The aim of this strategy
is to combine the best in strategies, PAS
∞
, PAS
3
, and
PAS
6
.
The results of performance for VAS, I
CNP
(VAS),
are also indicated by the curve labeled “VAS” in
Fig. 1. All the curves in the figure clearly indicate
that VAS can usually provide better overall perfor-
mance than other individual strategies. The improve-
ment ratios are particularly large just before the task
load reaches the theoretical limit of MMAS and right
after the contractors overcome the overload caused by
the huge number of queuing tasks. We believe that
this characteristic is important and will be discussed
in Section 4.4.
4.2 Learning Probabilistic Awarding
Although strategy VAS can provide better perfor-
mance to an MMAS, it assumes a number of fixed
threshold values as shown in Eqs. (3). We propose
that agents learn these threshold values for applying
it to other tasks as follows: First, manager m first cal-
culates the SDs of bid values for each t
i
∈ T and the
maximum difference between these SDs. This is de-
noted by D
SD
m
(T ). Manager m also retains the max-
imum and minimum values of D
SD
m
(T ) (denoted by
maxSDdiff, and minSDdiff ), thus far. Then, m esti-
mates the current task load using maxSDdiff, minS-
Ddiff, and D
SD
m
(T ). We will call the award strategy
according to this algorithm the adaptive probabilistic
awarding strategy, or AAS after this.
We will investigate whether AAS can provide the
good performance comparable to VAS for task T =
{t
1
,t
2
} and whether it also provides the acceptable
overall performances for other tasks that have differ-
ent task structures.
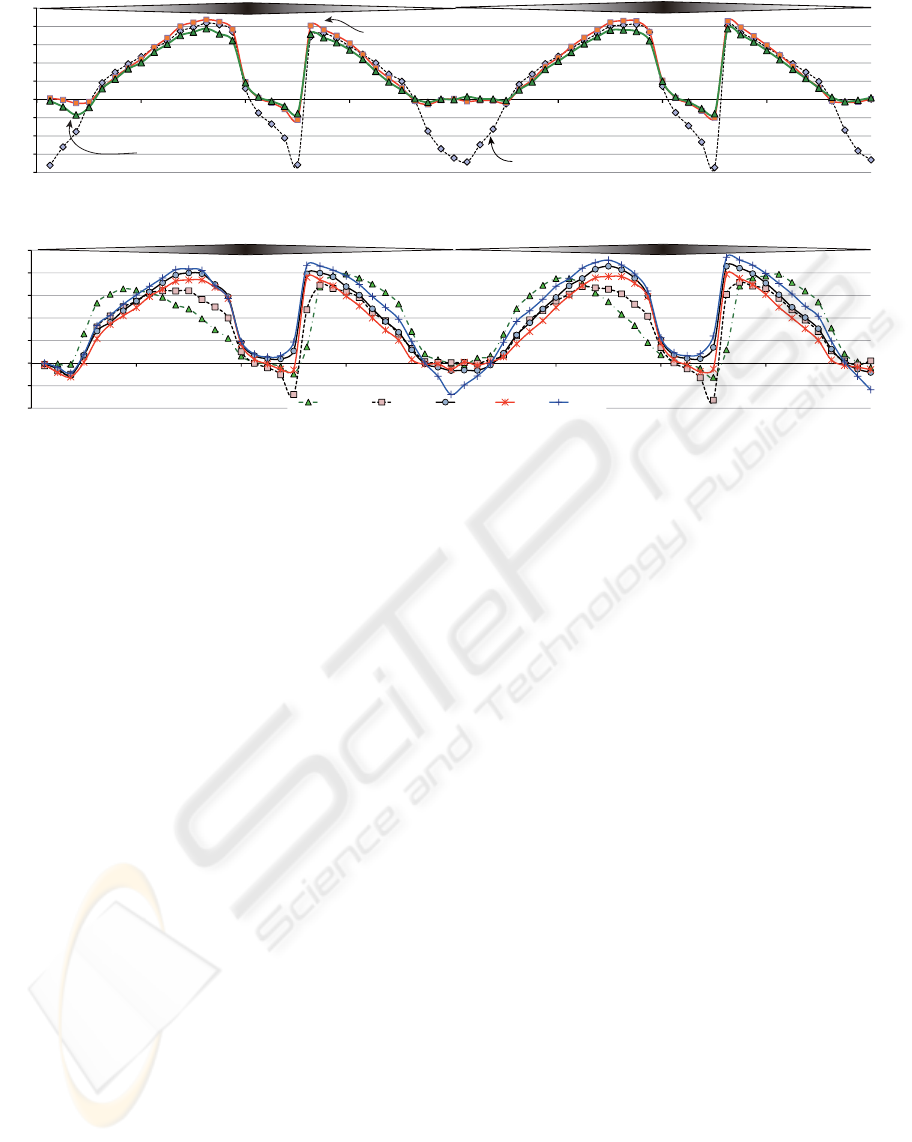
Improvement ratios I
CNP
(AAS) over time is plot-
ted in Fig. 3. The duration of this experiment was
double that of the previous experiment accomplished
by repeating it twice because agents had to learn the
maximum and minimum differences between the SDs
of bid values for individual subtasks. The changes
in task loads are also illustrated as gradated javelins.
Improvement ratios I
CNP
(PAS
6
) and I
CNP
(VAS) have
also been shown as benchmarks. Figure 3 indicates
that AAS can performs as efficiently as VAS. Note
that the performance of AAS is slightly lower than
VAS only in the beginning (from 0-K to 20-K ticks),
because the learning of threshold values T h
1
and T h
2
is not sufficient.
4.3 Applying Strategy to Other Tasks
Finally, we have to show whether or not the proposed
strategy can provide the better performance for tasks
with other cost structures. The AAS strategy relies on
the difference of costs of subtasks, we examined the
case when a task has the different cost ratio, other than
2500:500. Instead, we set the sum of the costs of these
tasks to 3000, in order to standardize the theoretical
upper limit number of task executions by all agents.
Let us denote the costs of subtasks as super-
scripts. For example T
25−3−2
= {t
a
1
,t
a
2
,t
a
3
} means
(γ(t
a
1
),γ(t
a
2
),γ(t
a
3
)) = (2500, 300,200). Thus, the task
used in the previous experiments is denoted by T
25−5
.
The results are plotted in Fig. 4. Note that, because
we intended to compare their performance under AAS
and PAS
∞
, we fixed the changes in task loads over
time in those experiments. Figure 4 indicates that
the overall performance for T
25−3−2
T
20−10
T
18−12
T
20−8−2
and T
15−8−5−2
under AAS are generally
better than those under PAS
∞
. Of course, VAS is not
applicable to these tasks that have different task struc-
tures.
PROBABILISTIC AWARD STRATEGY FOR CONTRACT NET PROTOCOL IN MASSIVELY MULTI-AGENT
SYSTEMS
169
-20
-15
-10
-5
0
5
10
15
20
25
0 40000 80000 120000 160000 200000 240000 280000 320000
time (ticks)
Improvement ratio (%)
VA S
PAS
6
AAS
Figure 3: Improvement ratios of AAS compared with PAS
6
and VAS over time.
-10
-5
0
5
10
15
20
25
0 40000 80000 120000 160000 200000 240000 280000 320000
15-8-5-2 20-8-2 20-10 22-8 18-12
time (ticks)
Improvement ratio (%)
T
T
TTT
Figure 4: Improvement ratios of AAS for various tasks.
4.4 Cases for Simpler Tasks
We have to discuss two simpler cases in which (1) the
costs of all subtasks are quite similar and (2) each sub-
task is allocated to one of disjoint sets of contractors.
In these cases, we believe that the simple extension of
(Sugawara et al., 2008a; Sugawara et al., 2008b) can
be applied, because the queue length reflects the task
loads (or more precisely, multiple awarding because
of task congestion) in these cases. It is also clear
that when a task cannot be divided into subtasks, the
method in (Sugawara et al., 2008a; Sugawara et al.,
2008b) is applicable without any extension.
sectionDISCUSSION The improvement in the pro-
posed algorithm was maximum just before the task
load reached the theoretical upper limit and right after
the contractors overcame the overload caused by the
huge number of queuing tasks. These corresponded
to situations during 50 to 75-K ticks, 105 to 120-
K ticks, 210 to 235-K ticks and 265 to 280-K ticks
in Figs. 3 and 4. We want to emphasize that this is
one of its quite important characteristics; an MMAS
should perform at its full potential near the theoretical
limit. If the task load is quite low, any task allocation
strategy can provide satisfactory services. However,
if it is extremely heavy and over the theoretical limit,
no strategy can accomplish acceptable performance.
In other situations, the system must yield maximum
performance. Our experimental results revealed that
the proposed strategy can provide excellent improve-
ments in these situations.
Note that the centers of the curves in Figs. 3 and
4 are slightly shifted to left. Moreover, if we look at
Fig. 4 more carefully, the values of improvement ra-
tios at around 100-K ticks and 260-K ticks peaked on
the upper of lower direction (but these are excessive
values). While the task load was over the cumulative
capabilities of MMAS, their queues became longer.
After the extremely busy situation, their lengths were
getting shorter and they returned to unbusy states. Of
course, the better strategy can execute tasks more ef-
ficiently, thus can enable all agents to return to un-
busy states a little earlier. This results in the peaks to
lower direction but their differences is not significant
because the PAS
∞
is better when the task load is the
extremely busy and under AAS, all managers intended
to adopt the same strategy.
As the communications link-bandwidth of the In-
ternet is getting increasingly broader, the bottleneck
in network computing has shifted to nodes (hosts) in
which many tasks are done. Here, it is important that
tasks should be distributed to appropriate servers that
can complete them in the shortest time. Communica-
tion delay, on the other hand, decreases and becomes
insignificant. However, our experiments showed that
if many managers determine the contractors accord-
ing to bids from local contractors, a high-performance
contractor is likely to be selected as the best bidder;
thus, tasks are concentrated on this contractor. There-
fore, some degree of fluctuation has beneficial effects
on enabling this concentration to be avoided. If we
more carefully consider the reason for the concentra-
tion, it must be multiple awarding due to the small
communication delay. As the network broadens, the
delay decreases, but we cannot eliminate the latency
caused by the finite speed of light and the finite pro-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
170

cessing speed of the switching fabric. Our experi-
ments suggest that this small delay significantly af-
fects the overall performance of busy MMASs. Re-
cent research has focused on overlay networks that
reflect the application-layer links between agents and
ignore the physical network topology. However, this
is insufficient in an MMAS to elicit agents’ capabili-
ties. It is necessary to take into account the physical
topology in designing an MAS to minimize interfer-
ence among agents.
Although the proposed method can provide bet-
ter performance than the naive CNP, it is possible that
more tailored controls can improve more for compli-
cated tasks. In addition, from Fig. 4, the duration
in which the improvement ratios I
CNP
(AAS) are large
moves to slightly less busier situations if |T | is larger.
We believe that this is caused by the increased chance
of multiple awards. Our experiments show that CNP
in an MMAS exhibits quite different features from
CNP in a small-scale MAS and thus a simple strat-
egy like the naive CNP cannot elicit the potential ca-
pability of MMASs. More research is needed for this
purpose; this paper represents the first step toward this
direction.
5 CONCLUSIONS
We proposed a probabilistic award strategy in CNP
for a massively MAS to elicit the potential capabili-
ties of all agents. In this strategy, a manager agent (a)
announces subtasks, (b) statistically analyzes the bids
for each of these, (c) estimates the current local task
load, and (d) introduces an adaptive degree of fluc-
tuation in the award phase. We then experimentally
demonstrated that this strategy provides considerably
better performance than the naive CNP.
In this paper, we focused on CNP because it is
the well-known protocol, but CNP is not the only ap-
proach to task allocation. It is necessary to investi-
gate other protocols (with some modification) or cre-
ate a new protocol for busy MMAS. This is our future
research. Meanwhile, when there are many agents,
it is crucial to consider the inter-agent structure like
(Gaston and desJardins, 2005; Abdallah and Lesser,
2007). Thus, to investigate the relationship between
network structures and the performance of the CNP
in MMASs is also another future research issue.
REFERENCES
Abdallah, S. and Lesser, V. (2007). Multiagent Reinforce-
ment Learning and Self-Organization in a Network
of Agents. In Proceedings of the Sixth International
Joint Conference on Autonomous Agents and Multi-
Agent Systems, pages 172–179, Honolulu. IFAAMAS.
Foster, I. (2002). What is the grid? a three point checklist.
Grid Today, 1(6).
Gaston, M. E. and desJardins, M. (2005). Agent-organized
networks for dynamic team formation. In Proceed-
ings of 4th Int. Joint Conf. on Autonomous Agents and
Multiagent Systems (AAMAS2005), pages 230–237.
Gu, C. and Ishida, T. (1996). Analyzing the Social Be-
havior of Contract Net Protocol . In de Velde, W. V.
and Perram, J. W., editors, Proceedings of 7th Euro-
pean Workshop on Modelling Autonomous Agents in a
Multi-Agent World (MAAMAW 96), LNAI 1038, pages
116 – 127. Springer-Verlag.
Sandholm, T. (1993). An Implementation of the Contract
Net Protocol Based on Marginal Cost Calculations. In
Proceedings of the Eleventh National Conference on
Artificial Intelligence, pages 256–262.
Smith, R. G. (1980). The Contract Net Protocol: High-
Level Communication and Control in a Distributed
Problem Solver. IEEE Transactions on Computers,
C-29(12):1104–1113.
Sugawara, T., Hirotsu, T., Kurihara, S., and Fukuda, K.
(2007). Performance Variation Due to Interference
Among a Large Number of Self-Interested Agents. In
Proceedings of 2007 IEEE Congress on Evolutionary
Computation, pages 766–773.
Sugawara, T., Hirotsu, T., Kurihara, S., and Fukuda, K.
(2008a). Adaptive Manager-side Control Policy in
Contract Net Protocol for Massively Multi-Agent Sys-
tems. In Proceedings of 7th Int. Joint Conf. on
Autonomous Agents and Multiagent Systems (AA-
MAS2008), pages 1433–1436. IFMAS.
Sugawara, T., Hirotsu, T., Kurihara, S., and Fukuda, K.
(2008b). ”controling contract net protocol by local
observation for large-scale multi-agent systems”. In
Cooperative Information Agents XII (CIA2008), pages
206–220. LNCS 5180, Springer.
Weyns, D., Bouck
´
e, N., and Holvoet, T. (2006). Gradi-
ent Field-Based Task Assignment in an AGV Trans-
portation System. In Proceedings of 5th International
Joint Conference on Autonomous Agents and Multia-
gent Systems (AAMAS2006), pages 842 – 849.
Xu, L. and Weigand, H. (2001). The Evolution of the Con-
tract Net Protocol. In Proceedings of WAIM 2001, vol-
ume LNCS 2118, pages 257–264.
PROBABILISTIC AWARD STRATEGY FOR CONTRACT NET PROTOCOL IN MASSIVELY MULTI-AGENT
SYSTEMS
171
