
ENTAILMENT OF CAUSAL QUERIES IN NARRATIVES USING
ACTION LANGUAGE
Pawan Goyal
1
, Laxmidhar Behera
1,2
and T. M. McGinnity
1
1
Intelligent Systems Research Centre, School of Computing and Intelligent Systems, University of Ulster, U.K.
2
Department of Electrical Engineering, Indian Institute of Technology, Kanpur, India
Keywords:
Question answering, Plan recognition.
Abstract:
In this paper, Action Language formalism has been used to reason about narratives in a multi agent framework.
The actions have been given a semantic frame representation. Hypothetical situations have been dealt using
different states for world knowledge and agents’ knowledge. A notion of plan recognition has been proposed to
answer causal queries. Finally, an algorithm has been proposed for automatically translating a given narrative
into the representation and causal query entailment has been shown.
1 INTRODUCTION
A narrative is a course of events about which the
reader may not be given the complete knowledge, i.e.
some of the knowledge needs to be inferred. Reason-
ing about the actual cause of events in a narrative is
one of the challenging problems in Natural Language
Processing (NLP). NLP researchers deal this problem
from the point of view of semantics and context, giv-
ing rise to a causal relation. There have been attempts
for reasoning about causal relations in text by Girju
(Girju and Moldovan, 2002) and Bethard (Bethard
and Martin, 2008).
A narrative involves multiple agents, where each
agent has a set of beliefs, which changes dynamically
upon the actions performed by him or other agents.
Typically researchers have given various logic for-
malisms for representing actions, their cause and ef-
fects. Much of the work has focused on action lan-
guages (Tu et al., 2007) (Baral and Gelfond, 2005)
for proper knowledge representation. There have also
been attempts using event calculus (Mueller, 2002),
situation calculus (Mccarthy and Hayes, 1969), non-
monotonic causal logic (Giunchiglia and Lifschitz,
2004) and action temporal logic (Giunchiglia and Lif-
schitz, 1999). While these approaches are successful
in building planning strategies, they are limited to en-
tailing the truth value of fluents
1
at varying situations
1
In artificial intelligence, a fluent is a condition that can
change over time and situation.
and only the causal queries captured by the causal
model (Baral et al., 1997) can be entailed.
In the knowledge representation of stories, we
come across plans made by agents. As we will show,
recognizing plans from observations is very essen-
tial for certain causal queries. There have been at-
tempts by researchers for plan recognition from nar-
ratives (Quilici et al., 1998). Reasoning about causal-
ity has also led researchers to look into plan iden-
tification (Pearl, 2000). However, in a multi agent
framework, we need to reason about a special case
of plan, in which the plan made by an agent dictates
the actions performed by another agent also. We pro-
pose a causal model for this special case. The pro-
posed causal model has been used for entailing causal
queries.
The paper has been organized as follows. In sec-
tion 2, the problem under consideration has been for-
mulated. In section 3, plan recognition and causal
query entailment have been discussed using the causal
model. In section 4, the mapping to logic program-
ming has been provided. In section 5,the algorithm
for translating the narrative into the proposed for-
malism has been discussed. In section 6, the causal
queries being answered by the method and the results
have been discussed. Conclusion and future work
have been provided in section 7.
112
Goyal P., Behera L. and M. Mcginnity T. (2009).
ENTAILMENT OF CAUSAL QUERIES IN NARRATIVES USING ACTION LANGUAGE.
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval, pages 112-118
DOI: 10.5220/0002275601120118
Copyright
c
SciTePress
2 PROBLEM DEFINITION
The problem of narrative understanding is being ad-
dressed: “To read a narrativeand answer the questions
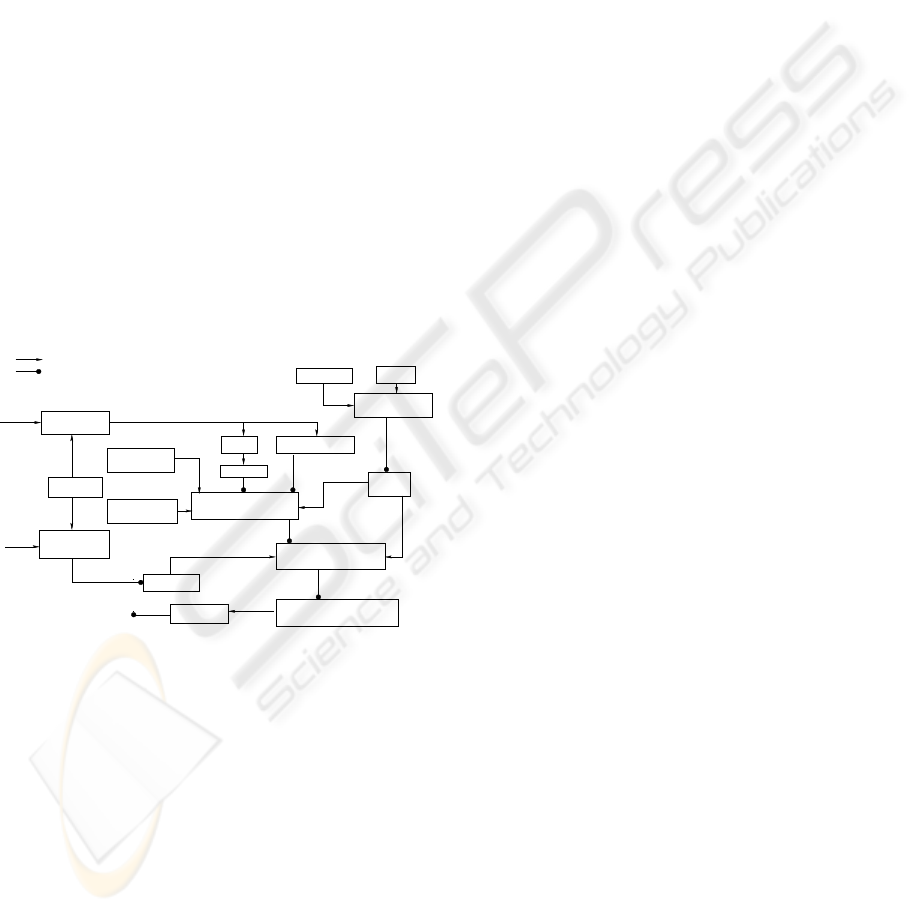
at the end of it”. Figure 1 gives an overall description
of a narrative understanding system. The input nar-
rative is to be parsed for obtaining the dependency
relations. The ‘fact extractor’ extracts the facts as re-
quired by the ‘dynamic situation representation’. The
‘word sense disambiguation’ and ‘anaphora resolu-
tion’ modules give an unambiguous representation of
narrative with distinct objects, agents and verbs. The
narrative is translated to the ‘dynamic situation rep-
resentation’ using the ‘knowledge base’, ‘model for
capturing dynamics’ and the ‘inference mechanism’
(which has belief update as its essential part). Finally,
a query is translated by the ‘question processor’ and a
goal is generated. The prolog program uses the goal
to generate the output, which acts as input to the ‘nat-
ural language generation’ module, giving the answer
in natural language. In this work, the focus is on the
‘Model for capturing dynamics’, ‘Dynamic situation
representation’ and the ‘Fact extractor’. The set of
queries have been restricted to the causal queries.
Arrows for indicating inputs to a block
Arrows for indicating output from a block
Narrative
Question
NLG
Query
Fact Extractor
WSD
WordNet
Learning
Domain Knowledge
Knowledge
Base
Narrative with Agents, Verbs
and Relations
Dynamic Situation
Representation in Narrative
Answer Generated in Logic
Representation
Question Processor
Parser
Model for
Inference
Mechanism
Anaphora Resolution
NLG: Natural Language Generation
Capturing Dynamics
WSD: Word Sense Disambiguation
KR F/W: Knowledge Representation Framework
KR F/W
Answer
Figure 1: Block Representation of the Narrative Under-
standing System.
In subsection 2.1, the model used for capturing dy-
namics has been reviewed. In subsection 2.2, the dy-
namic situation representation built from a narrative
is reviewed.
2.1 Model for Capturing Dynamics
The Action Language A
C
K
formalism, presented in
(Tu et al., 2007) is suitable for representing causal
laws and incomplete information. The propositions
in A
C
K
for domain description are as follows:
1.executable(a,ψ) 2.causes(a,l,φ)
3.if(l, φ) 4.determines(a,θ)
A proposition of form (1) is called an executability
condition. It states that a is executable in any situ-
ation in which ψ holds. A proposition (2), called a
dynamic causal law, represents a conditional effect of
an action. It says that performing a in a situation in
which φ holds, causes l to hold in the successor sit-
uation. A proposition (3), called a static causal law,
states that l holds in any situation in which φ holds. A
knowledge proposition (or k − proposition for short)
(4) states that the values of literals in θ, sometimes
referred to as sensed-literals, will be known after a is
executed (a is the sensing-action).
In our attempt to answer causal queries,
we propose to replace ‘executable(a, ψ)’ by
‘isPossible(a,ψ)’. The reason behind this is the
following: While dealing with a real world narrative,
it is difficult to come up with executability conditions.
However, learning methods can be employed to come
up with the model, ‘what situations(ψ) caused an
agent to perform an action(a)?’. This formalism
allows us to answer the queries ‘Why did the agent
perform action a?’, given that there is a domain law
of the proposed form. Further, we propose to add the
pre conditions in sensing actions as well, i.e. replace
‘determines(a,θ)’ with ‘determines(a,θ,φ). The
reason for the proposed change is the representation
of hypothetical situations. Hypothetical situations
are caused while a sensing action is performed.
However, the agent may like to believe the situation
based on certain constraints. φ are the constraints (set
of fluents). We also propose to add the proposition
‘isGoal(l,φ,ag)’, which allows us to select goal for
agents ag in various situations. The proposition is
needed to recognize that the agent ag has a desire to
achieve l and the actions performed by ag may be
the plan of the agent, given that ag achieves l (The
statement is valid only for successful plans. The work
does not consider the unsuccessful plans.).
2.2 Dynamic Situation Representation
of Narrative
A narrativecan be seen as a pair (D,O) where D is the
domain description and O is a set of observations. Ob-
servations are to be interpreted with respect to D (D is
the set of domain dependent axioms, as enumerated
in subsection 2.1. In a narrative involving multiple
agents, all the agents may not have complete knowl-
edge about the world. We use an approximate state
(combined-state) S =< s,
∑
>, where s represents the
real state of the world, while
∑
represents the set of
ENTAILMENT OF CAUSAL QUERIES IN NARRATIVES USING ACTION LANGUAGE
113

states
2
, the agents are in.
To interpret the facts from D, we need to select the
initial situation together with a path, which describes
the actual behavior of the system.
In a narrative, we observe both fluents and actions
and the effect of an action may not be explicitly stated.
Thus the assumption that ‘No action occurs except
those needed to explain the facts in the domain de-
scriptions.’ (Baral et al., 1997) is not justified and
the narrative is inconsistent with respect to the causal
interpretation. We, therefore do not discuss causal
model in general, but only the causal model for the
plans made by the agent.
3 OUR FORMALISM:
ENTAILING CAUSAL QUERIES
In our formalism, we discuss the domain representa-
tion, observation interpretation and query entailment.
3.1 Domain Description D
The domain is described using the following proposi-
tions, discussed in the previous section:
1.causes(a,l,φ) 2.if(l, ψ)
3.determines(a,θ,φ) 4.isGoal(l,φ,ag)
5.isPossible(a,ψ)
3.2 Observation Interpretation O
Interpreting observation is the central part of the
model. It needs to use D to get the causal representa-
tion. The algorithm is described in section 5.
The notion of ‘desire’ for an agent has been used as
the basic step in plan recognition. Previously, Baral
(Baral and Gelfond, 2005) has used intended actions
in planning. Cao (Cao and Pontelli, 2004) has also
used desires to allow users to express preferences and
priorities in planning. In our formalism, we use the
notion as follows: If agent has desire to achieve a cer-
tain goal, and the observation shows that he has really
achievedthe goal, it is most likely a plan and the agent
performs actions intending a future step in the plan.
Before getting into the problem, “How do we gather
such knowledge”, we need to reason about ‘how to
represent this knowledge’, and once represented, how
to use it for answering causal queries. In this paper,
2
In our formalism, each agent thinks himself to be in a
single state and therefore, the number of agents is an upper
bound on the number of states in a particular situation. It is
possible that some of the agents agree on all the fluents and
hence, are in same state.
we discuss only the successful plans. In this plan, the
agent may perform actions that (The enumerated ex-
amples are taken from the specific story from section
6):
1. Change the knowledge of another agent. (Ex: The
rabbit stated that there is another lion, who is chal-
lenging the supremacy of the lion.)
2. Are evidences for the constraints satisfying the hy-
pothetical situations (Ex: The rabbit strode along the
lion by sunset. The action was performed to satisfy
the constraint that if the rabbit met the lion, it must be
late.)
3. Any other action, which the agent performs to
achieve the goal. (For example, the rabbit lead the
lion to the well. The action was performed so that it
can show the lion its reflection.)
We give the following definitions for describing
the causal model of the plan:
Definition 1. (The Chain of Causal Relations): We
say that there exists a chain of causal relations for ac-
tion a
i
and a
i+1
if the following holds:
1. occursAt(a
i
,S
i
).occursAt(a
i+1
,S
i+1
).
2. ∃ f,causes(a
i
, f, p), p ⊆ S
i
, not(holds( f,S
i
)),
isPossible(a
i+1
,q), f ∈ q
For the actions a
i
and a
j
, j > i + 1, we say that
the chain of causal relations exist if any two ac-
tions a
k
,a
k+1
belonging to the sequence of actions
a
i
,... ,a
j
satisfy the above two conditions.
Definition 2. (The Plan): Given a narrative and
a situation model, the sequence of situations P =
S
S
,... ,S
E
is said to be a plan sequence if the follow-
ing holds true:
1. The agent A has a goal l in situation S
S
.
2. ∃ a sequence of actions a
S
,... ,a
E
such that:
occursAt(a
S
,S
S
).... occursAt(a
E
,S
E
).
3. The agent achieved the goal l in the situation S
E+1
.
4. For the actions, a
S
,... ,a
E
, we have the sequence
of actions, where the subject is A given by act
A
=
(a
A
)
1
,... ,(a
A
)
l
and there is no chain of causal rela-
tions for any two actions (a
A
)
k
,(a
A
)
k+1
from the ac-
tion sequence.
Definition 3. (Hypothetical Situation): An agent
A is in a hypothetical situation at the situation S
i
if
the corresponding world state is sw
i
, the agent A’s
state is (sa
A
)
i
and ∃ f s.t. not(holds( f,sw
i
)) and
holds( f, (sa
A
)
i
).
Definition 4. (Evidence Action): If the plan P en-
tails the sequence of actions act
A
, the action a
i
∈ act
A
is said to be evidence action if ∃S
j
, such that it is a hy-
pothetical situation for agent B and it has the precon-
dition (The hypothetical situation is always caused by
KDIR 2009 - International Conference on Knowledge Discovery and Information Retrieval
114

sensing actions) as the fluent g caused by a
i
such that
the fluent f is hypothetical, i.e. the following holds:
causes(a
i
,g, p). determines(a
k
, f,g).
not(holds( f,sw
j
)). holds( f, (sa
B
)
j
).
We add the following proposition for these actions in
the observation: ‘evidenceOf(a
i
, f).’
Definition 5. (Causal Model for Plan): Given a Plan
P of the agent A and the sequence of actions act
A
, let
us define the following sets: (act
A
)
E
be the set of evi-
dence actions. (act
A
)
H
be the set of actions such that
the resulting situation is a hypothetical situation for
agent B,B 6= A. (act
A
)
C
= act
A
/((act
A
)
E
∪ (act
A
)
H
).
We have the following:
1. If (act
A
)
C
= {a
1
,... ,a
k
}, we have the causal
model: causeOf(a
i
,a
i+1
),i ∈ {1,.. .,k− 1}
2. For an action a
i
∈ (act
A
)
H
, causeOf(a
i
, f), such
that if occursAt(a
i
,S
j
), S
j+1
is a hypothetical situa-
tion for agent B, B 6= A with not(holds( f, sw
j+1
)) and
holds( f, (sa
B
)
j+1
).
3. For an action a
i
∈ (act
A
)
E
, we have
evidenceOf(a
i
, f), where f is defined as above.
3.3 Query Entailment
For the action language formalism, the queries have
been limited to the truth values of certain fluent in a
certain situation or after a series of actions performed
in a situation. Since causal queries are the focus of
this work, we are extending the queries being rep-
resented. The following categories of causal queries
need to be entailed:
1. Fluents caused an action to occur: These queries
are encoded in the proposition, proposed in this paper
‘isPossible(a,ψ)’. Thus, for the query: ‘Why did ac-
tion a happen?’, the answer should be ‘due to ψ’.
2. Action caused fluents to hold: These queries
are encoded in the already existing dynamic (static)
causal law ‘causes(a,l,φ) (determines(a,θ,φ))’. Thus
for the query, ‘Why does ‘l(θ)’ hold?’, the answer
should be ‘due to ‘a’.
3. Actions having causal relations due to planning:
These queries are entailed in the causal model for the
plan.
It can be easily observed that these queries are en-
tailed in the causal model. We are extending query to
handle the chain of causal relations as discussed by
Definition 1.
4 MAPPING TO LOGIC
PROGRAM
In this section, we describe the logic programming
approximation π
D
of the domain description D. For
actions, we are using semantic frames. Let D be
a domain description with the explicit actual path
a
0
,... ,a
k−1
. The logic programming approximation
of D will consist of the following rules:
4.1 Domain Dependent Axioms
4.1.1 Description of Actual Path
We have the following axioms for denoting the world
states:
precedes(s
0
,s
1
).... precedes(s
k−1
,s
k
).
occursAt(a
0
,s
0
).... occursAt(a
k−1
,s
k−1
).
For agent and world states, we use the notation that in
a situation, being referred as s
i
, the world is in state
w
i
and the agents are in state (sa
1
)
i
,... ,(sa
N
)
i
, where
N is the number of agents. We have the following
axioms:
1. situationOf(s
i
,(sa
j
)
i
,ag
j
) refers to the fact that
the situation (sa
j
)
i
is the knowledge of agent ag
j
in
situation s
i
.
2. allAgree(s
i
,(sa
j
)
i
) refers to the fact that all fluents
that hold in situation s
i
, also hold in situation (sa
j
)
i
.
4.1.2 Boundary Conditions
These conditions are responsible for representing ob-
served fluents at different situations. ‘holds( f,s
i
).’
represents that fluent f is observed to hold in situa-
tion s
i
.
4.1.3 Possible Goals
These propositions are responsible for determining
the values of agents at different situations. The propo-
sition ‘isGoal(l, p,(sa
j
)
K
).’ states that agent a
j
has
goal l in situation (sa
j
)
K
3
, given the list of fluents p
holds in the situation.
4
4.2 Domain Independent Axioms
These axioms are independentof the domain and need
to be included in every narrative, encoded in given
3
In our formalism, we represented this proposition as
isGoal(l,φ,ag). However, in logic program, we use the sit-
uation (sa
j
)
K
corresponding to the agent ag. It uniquely
determines the agent ag.
4
We are not describing other domain dependent axioms.
These can be referred in the paper by Baral (Baral et al.,
2000).
ENTAILMENT OF CAUSAL QUERIES IN NARRATIVES USING ACTION LANGUAGE
115
formalism. We have used following axioms
5
:
4.2.1 Axioms for Plan Recognition
Firstly, we need an axiom to encode, when the plan is
achieved.
achievedGoal(X,S
B
) : −holds(X,S
B
),isGoal(X,Y,S
A
).
Once Goal has been achieved, we can name
the sequence of actions performed to be a plan:
isPlan(S
1
,S
S
) : −isGoal(X,Y, S
1
),achievedGoal(X,S
S
).
We have in addition, the axioms for the definitions
given in section 3.
4.2.2 Axioms for Causal Queries
The axioms included are for static and dynamic causal
laws, as well as from the causal model of plan.
5 THE ALGORITHM
Given a narrative, the goal is to automatically trans-
late it to the proposed formalism. The algorithm is
general for any text but the causal model is specific to
the narratives. The basic steps in the algorithm are as
follows:
1. Dependency Parse: The dependency parse of the
narrative has been obtained using the Stanford depen-
dency parser (MacCartney, 2008).
2. The nouns and verbs are given separate identifiers.
The nouns are classified as agents using the criteria
that i). It should be identified as a ‘living thing’ by the
Wordnet (Fellbaum, 1998). ii). Its frequency should
be more than the given threshold. Finally, the whole
narrative is translated in Prolog using the two predi-
cates
6
:
word(a,X): identifier a is used for word X.
relation(Z, X,Y): The dependency relation Z holds in
the identifiers X and Y.
3. The domain dependent axioms are entered. These
axioms are responsible for the knowledge update of
the narrative
7
.
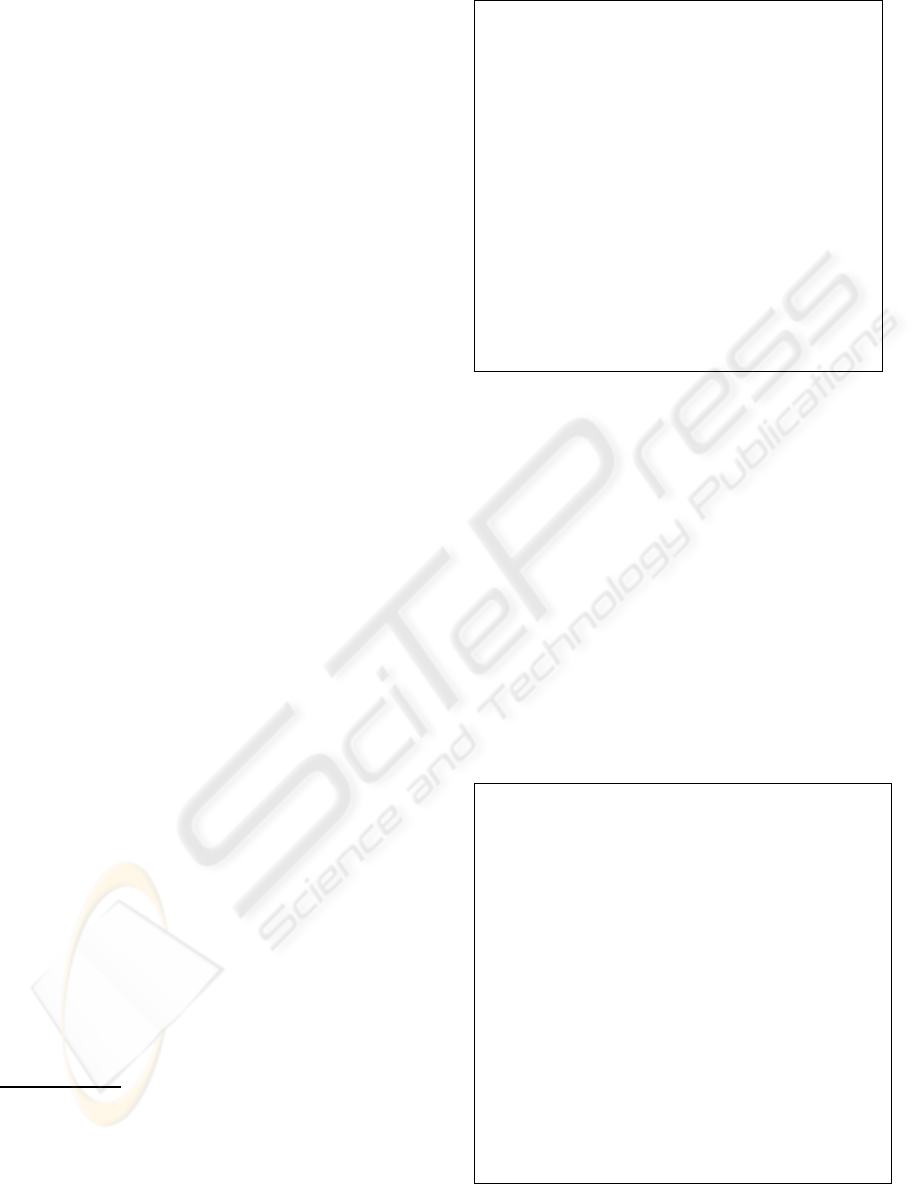
4. The algorithm in Figure 2 is used to represent the
narrative.
5
We are not describing the axioms for Inertia rule, effect
of actions and initial states. These can be referred in the
paper by Baral (Baral et al., 2000).
6
The identifiers distinguish between nouns, verbs, ad-
verbs and adjectives and therefore, we do not use POS tags.
7
In this work, we have assumed that the domain depen-
dent axioms are given to us. However, we are working for
learning this domain knowledge.
1. Start with the initial situation S
0
.
2. The main verb of the sentence is observed. The verb is categorized as
a fluent, non-sensing action or sensing action as per the Verbnet.
i). If the verb represents a fact (fluent f), the observation
‘holds( f,s
N
).’ is added, where s
N
is the current situation.
ii). If the verb is a non sensing action, the situation is to be changed
using ‘occursAt(a, s
N
).’ and ‘holds( f,Res(a, s
N
)).’, where
the later is added using the causal relations of the domain
‘causes(a,l, φ),φ ⊆ s
N
’, Res(a,s
N
) is the
situation as a result of applying action a in situation s
N
.
iii). If the verb is a sensing action and determines the value of fluent
θ using the proposition determines(a,θ, φ), the
situation of the corresponding agent is changed.
3. The proposition isGoal(l,φ, ag) is used to get the corresponding
goal of the agent ag, if any. If there existsa goal, it is added to the
program: ‘isGoal(l, φ,s
N
)’.
4. The static causal laws are used to represent the value of other
fluents.
5. The inertia law for the fluents is added:
holds( f,Res(a, s)) : −holds( f,s), not(ab( f,a
s
))
6. If the fluent resembles a goal, already declared by isGoal(l,φ, s
i
),
the axiom ‘acievedGoal(l, ag,s
N
)’ is added. The causal model for
the plan is built using the Definition 5.
Figure 2: The algorithm for the dynamic situation represen-
tation of the narrative.
6 RESULTS AND DISCUSSIONS
The algorithm discussed in the previous section has
been implemented on a set of stories. An example
of one such story has been given in Figure 3. After
the narrative is automatically translated into the ‘dy-
namic situation representation’ using the algorithm,
proposed in section 5, we had 18 different situations.
The domain dependent axioms were given to the sys-
tem. We have followed the Verbnet syntax (Schuler,
2005), so that the axioms are more general and appli-
cable to any text. Below are two examples of these
axioms:
Once a ferocious lion lived in the forest. The lion was greedy. It
started killing animals in the forest indiscriminately. The animals
gathered. They decided to approach the lion. They had an agreement
with the lion that one animal of each species will volunteer to be
eaten by the lion everyday. So every day it was the turn of one of
the animals. In the end came the rabbits’ turn. The rabbits chose an
old rabbit among them. The rabbit was wise. It took long time to
go to the lion. the lion got impatient on not seeing any animal come
by. It swore to kill all animals the next day. The rabbit then strode
along to the lion by sunset. The lion was angry at it. But the wise
rabbit was calm. the rabbit told the lion that an angry lion attacked
the rabbit on the way. Somehow it escaped to reach safely, the rabbit
said. The rabbit said that the other lion was challenging the supremacy
of his Lordship the lion. The lion was naturally very enraged and asked
the rabbit to take him to the location of the other lion. The wise
rabbit agreed and led the lion towards a deep well filled with water.
Then the rabbit showed the lion his reflection in the water of the well.
The lion was furious and started growling. Naturally the image in
the water, the other lion, was equally angry. Then the lion jumped
into the water at the other lion to attack it, and so lost its life in the
well. Thus the wise rabbit saved the forest and its inhabitants from
the proud lion.
Figure 3: The algorithm for the dynamic situation represen-
tation of the narrative.
KDIR 2009 - International Conference on Knowledge Discovery and Information Retrieval
116

========axiom 1=========
VERB:live
THEME:nsubj->INHABITANT
THEME:prep_in->LOCATION
ab(live,lost):-nsubj(lost,INHABITANT),
dobj(lost,life).
========axiom 2=============
VERB:kill
THEME:nsubj->KILLER
THEME:dobj->PREY
isGoal(PREY,not(kill)):-aspect(kill,start).
Axiom 1: If the fluent ‘live’ holds in this situation, it
will not hold (i.e. abnormality) when the subject of
‘live’ loses its life. The fluent ‘live’ holds in the nar-
rative at initial situation. The abnormality condition
is added by axiom 1 to entail ‘not(live)’, when the ac-
tion ‘the lion lost its life’ occurs in the narrative.
Axiom 2: If the action ‘kill’ occurs at this situation
with aspect of ‘start’, the PREY (which is a theme
role) has a goal to stop the killing ‘not (kill)’. The
action ‘kill’ occurs in the initial situation in the story.
The axiom generates the goal ‘not (kill)’ for the ‘ani-
mals’.
As can be seen, we have used theme roles for the
domain dependent axioms (belief update rules).
The system answers factual queries
8
using pattern
matching and the synonyms information. We used the
predicate ‘causeOf(X,Y)’ to reason about various ac-
tions and fluents. We show below examples of some
causal queries
9
:
1. Why did the animals decide to approach the lion?
A: To have an agreement.
2. Why did the lion start killing animals indiscrimi-
nately in the forest?
A: Because the lion was greedy.
3. Why was the lion getting impatient?
A: Because it did not see any animal coming.
These queries are easily answered using the causal
laws, sensing actions and possible actions axioms.
The set of queries answered due to the causal model
of Plan are as follows:
4. Why did the rabbit show the reflection of the lion?
A: It wanted the lion to assume that there is another
lion.
The answer is obtained since the action ‘show ∈
(act
A
)
H
’, where A refers to the rabbit.
5. Why did the rabbit stride to the lion by sunset?
A: As an evidence to show that there was another lion.
The fact that ‘the rabbit came late’ is a precondition
8
These queries include the WH-questions and the deci-
sion questions
9
The answers generated were in Prolog form. However,
different scripts are used to generate the natural language
answers, depending upon the semantics of the query.
(or constraint) for the lion to believe that there was
another lion. Thus ‘stride ∈ (act
A
)
E
’.
While the first three questions can be answered us-
ing the causal model, the questions 4 and 5 need deep
understanding, which is accomplished in our formal-
ism using plan recognition, hypothetical actions and
evidence actions. It is clear that the category of ques-
tions is limited by the chosen model.
7 CONCLUSIONS AND FUTURE
WORK
The work focuses on the problem of coming up with
a theoretical formalism to answer causal queries in
a real world narrative. The main contribution of the
work is to use the plan recognition for reasoning about
the cause. However, the notion of causality (Pearl,
2000) has to be incorporated in the formalism to rea-
son about actual cause. Future work will demonstrate
the system to answer counterfactual queries. Another
important aspect for future work will be to trans-
late the queries into Prolog representation to generate
goals and use the answers given by Prolog to generate
natural language answers.
To make a fully automated system, which can an-
swer causal queries, substantial additional research
is needed. The probabilistic extension of the model
is required to handle the incomplete domain knowl-
edge and uncertainty. The belief update model has
to be built based on the Verbnet (Schuler, 2005) and
Framenet (Baker and Sato, 2003) representation. Se-
mantic entailment will need to be used but the sound-
ness and completeness of the representation needs to
be investigated.
REFERENCES
Baker, C. F. and Sato, H. (2003). The framenet data and
software. In ACL ’03: Proceedings of the 41st An-
nual Meeting on Association for Computational Lin-
guistics, pages 161–164, Morristown, NJ, USA. As-
sociation for Computational Linguistics.
Baral, C. and Gelfond, M. (2005). Reasoning about in-
tended actions. In AAAI, pages 689–694.
Baral, C., Gelfond, M., and Provetti, A. (1997). Repre-
senting actions: Laws, observations and hypothesis.
Journal of Logic Programming, 31:31–1.
Baral, C., Mcilraith, S., and Son, T. C. (2000). Formulating
diagnostic problem solving using an action language
with narratives and sensing. In KR 2000, pages 311–
322.
Bethard, S. and Martin, J. H. (2008). Learning semantic
links from a corpus of parallel temporal and causal
ENTAILMENT OF CAUSAL QUERIES IN NARRATIVES USING ACTION LANGUAGE
117

relations. In ACL-08: HLT, short papers, pages 177–
180.
Cao, T. and Pontelli, S. E. (2004). Planning with prefer-
ences using logic programming. In Proc. LPNMR04,
pages 247–260. Springer.
Fellbaum, C. (1998). WordNet: An Electornic Lexical
Database. Bradford Books.
Girju, R. and Moldovan, D. (2002). Text mining for causal
relations. In Proceedings of the FLAIRS Conference,
pages 360–364.
Giunchiglia, E. and Lifschitz, J. L. V. (2004). Nonmono-
tonic causal theories. Artificial Intelligence, 153:2004.
Giunchiglia, E. and Lifschitz, V. (1999). Action languages,
temporal action logics and the situation calculus. In
Working Notes of the IJCAI’99 Workshop on Non-
monotonic Reasoning, Action, and Change.
MacCartney, B. (2008). The stanford parser version 1.6.
Mccarthy, J. and Hayes, P. J. (1969). Some philosophical
problems from the standpoint of artificial intelligence.
In Machine Intelligence, pages 463–502. Edinburgh
University Press.
Mueller, E. T. (2002). Understanding script-based stories
using commonsense reasoning. Cognitive Systems Re-
search, 5:2004.
Pearl, J. (2000). Causality: Models, Reasoning, and Infer-
ence. Cambridge University Press.
Quilici, A., Yang, Q., and Woods, S. (1998). Applying
plan recognition algorithms to program understand-
ing. Journal of Automated Software Engineering,
5:372.
Schuler, K. K. (2005). Verbnet: a broad-coverage, compre-
hensive verb lexicon. PhD thesis, Philadelphia, PA,
USA. Supervisor-Palmer, Martha S.
Tu, P. H., Son, T. C., and Baral, C. (2007). Reasoning
and planning with sensing actions, incomplete infor-
mation, and static causal laws using answer set pro-
gramming. Theory Pract. Log. Program., 7(4):377–
450.
KDIR 2009 - International Conference on Knowledge Discovery and Information Retrieval
118
