
RANDOM VARIATES GENERATING METHODS OF
TIME-BETWEEN-FAILURES FOR THE REPAIRABLE
SYSTEMS UNDER AGE-REDUCTION
PREVENTIVE MAINTENANCE
Chun-Yuan Cheng
Dept. of Industrial Engineering and Management, Chaoyang University of Technology
168, Jifong E. Rd., Wufong, Taichung County, 41349, Taiwan
Renkuan Guo
Department of Statistical Sciences, University of Cape Town, Cape Town, South Africa
Mei-Ling Liu
Dept. of Industrial Engineering and Management, National Taipei University of Technology, Taipei, Taiwan
The Office of Academic Affairs, Chaoyang University of Technology, Taichung County, Taiwan
Keywords: Simulation method, Time-between-failure random variates, Preventive maintenance, Age reduction.
Abstract: Based on the theoretical model, a numerical method is usually necessary for obtaining the optimal
preventive maintenance (PM) policy for a deteriorating system since the theoretical model becomes
complicated when the system’s hazard rate function is changed after each PM. It makes the application of
the theoretical model not suitable for real cases. Moreover, the theoretical model assumes using infinite
time span to obtain the long-term expected number of failures. Yet, in reality, the deteriorating systems
always have a finite life time. Hence, an optimal solution might not be resulted as compared to the infinite
time span. Therefore, we consider using the simulation method to obtain a range of the near-optimal PM
policy. The critical step of the simulation method for obtaining a near-optimal PM policy is the generation
of the random variates (RV). In this research, three methods are developed to generate the required RVs of
the time-between-failures (TBF) for the finite-time-span preventive maintenance model with age reduction
effect. It is found that there are no significant differences among three proposed RV generating methods
when comparing the dispersion of the generated RV’s. However, the rejection method is the simplest
method for obtaining the near-optimal PM policies. Examples of the near-optimal PM policies are also
presented in this paper.
1 INTRODUCTION
Based on the theoretical model, a numerical method
is usually necessary for finding the optimal
preventive maintenance (PM) policy for a
deteriorating system since the theoretical model
becomes complicated when the system’s hazard rate
function is changed after each PM. It makes the
application of the theoretical model not suitable for
real cases. Furthermore, by the theoretical model,
the optimal policy is obtained based on the long-
term failures occurrence under the assumption of the
infinite time span. Yet, in reality, the life time of a
system is always finite. Hence, the optimal solution
from the theoretical model may not suitable for a
single system with finite life time. In practical, a
near-optimal PM policy might be good enough for
the real applications. In order to obtain a near-
optimal PM policy for the real situations, the
simulation method is applied to generate random
variates (RV) of the time between failures (TBF).
However, recent literature survey has shown that
325
Cheng C., Guo R. and Liu M. (2009).
RANDOM VARIATES GENERATING METHODS OF TIME-BETWEEN-FAILURES FOR THE REPAIRABLE SYSTEMS UNDER AGE-REDUCTION
PREVENTIVE MAINTENANCE.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 325-330
DOI: 10.5220/0002219903250330
Copyright
c
SciTePress

little research has been done to obtain a near-optimal
PM policy by using the simulation method.
The critical step of the simulation method for
obtaining a near-optimal PM policy is the generation
of the random variates (RV). In this research, three
methods are developed to generate the required RVs
of the time-between-failures (TBF) for the finite-
time-span PM model with age reduction effect.
Based on the simulation method developed by
Cheng (2005), the first proposed method applies the
inverse transformation method to generate the
random variates (RV) of the time between failures
(TBF) for a PM model with age reduction effect.
The algorithm assumes that the occurrence time of
the last failure in the i
th
PM cycle is irrelative to the
occurrence time of the first failure in the i+1
st
PM
cycle. This RV generating method for the TBF is
called “the offset inverse transformation method” in
this paper.
Intuitively, however, the occurrence time of the
first failure in the i+1
st
PM cycle is affected by the
occurrence time of the last failure in the i
th
PM cycle
since the failure occurrence of the system follows
the non-homogenous Poisson process (NHPP) and
the PM is imperfect (i.e., the PM will not renew the
system to zero failure rate). Therefore, in this
research, we have developed a modified inverse
transformation method for generating the RVs of the
TBF which is called “the trace-back inverse
transformation method”. The second proposed
method assumes the occurrence time of the first
failure in the i+1
st
PM cycle is affected by the
occurrence time of the last failure in the i
th
PM
cycle.
Furthermore, since the rejection method is often
applied to generating RVs of complicated
distributions, we also present the third proposed
method, the rejection method, for generating the
RVs of the TBF under the age-reduced PM model.
In this paper, the algorithms and the simulation
results for the above three RV generating methods
are presented and compared. An example of finding
the near-optimal PM policy is provided by using the
rejection method of RV generation.
2 THE BACKGROUND FOR THE
THEORITICAL MODEL
2.1 Nomenclature
L the finite life time span for the system or
equipment
T the time interval of each periodic PM
N the number of PM performed in the finite
life time span (L)
k
i
the generated number of failures in the i
th
PM
cycle, i = 0, 1, …, N
x
i,j
the generated time between the j-1
s
t
and the
j
th
failures in the i
th
PM cycle, i = 0, 1, …, N;
j = 1, 2, …, k
i
t
i,j
the generated occurrence time of the j
th
failure in the i
th
PM cycle where t
i,j
= t
i,j-1
+
x
i,
j
1, +
i
ki
x
the generated time between the last (k
i
th
) and
the k
i
+1
st
failures (not existing) in the i
th
PM
cycle
1, +
i
ki
t
the generated occurrence time of k
i
+1
st
failure (not existing) in the i
th
PM cycle, i.e.,
1, +
i
ki
t
exceed the time of the i
th
PM cycle
γ the reduced age after each PM
w
i,j
the generated effective occurrence time (age)
of the j
th
failure in the i
th
PM cycle where w
i,j
= t
i
,j
-iγ
U
i,j
the random number required for the
generation of x
i
,j
λ(t) Original hazard rate function (before the 1
s
t
PM action)
λ
i
(t) Hazard rate function at time t where t is in
the i
th
PM cycle and λ
0
(t)=λ(t)
F(t) the cumulated distribution function (CDF) of
the TBF at age t
R(t) the reliability at age t
C
p
m
Cost of each PM
C
m
r
Minimal repair cost of each failure
TC The total maintenance cost function in the
finite life time span
2.2 Assumptions
y The system has a finite useful life time L.
y
The system is deteriorating and repairable over
time where the failure process follows the non-
homogenous Poisson Process (NHPP) with
increasing failure rate (IFR). Weibull distribution
with hazard rate function:
1
)(
−
⎟
⎠
⎞
⎜
⎝
⎛
⎟
⎠
⎞
⎜
⎝
⎛
=
β
θθ
β
λ
t
t
is used to
illustrate the examples in this paper, where
β
is
the shape parameter and
θ
is the scale parameter.
y The periodic PM actions with constant interval (T)
are performed over the finite time span L.
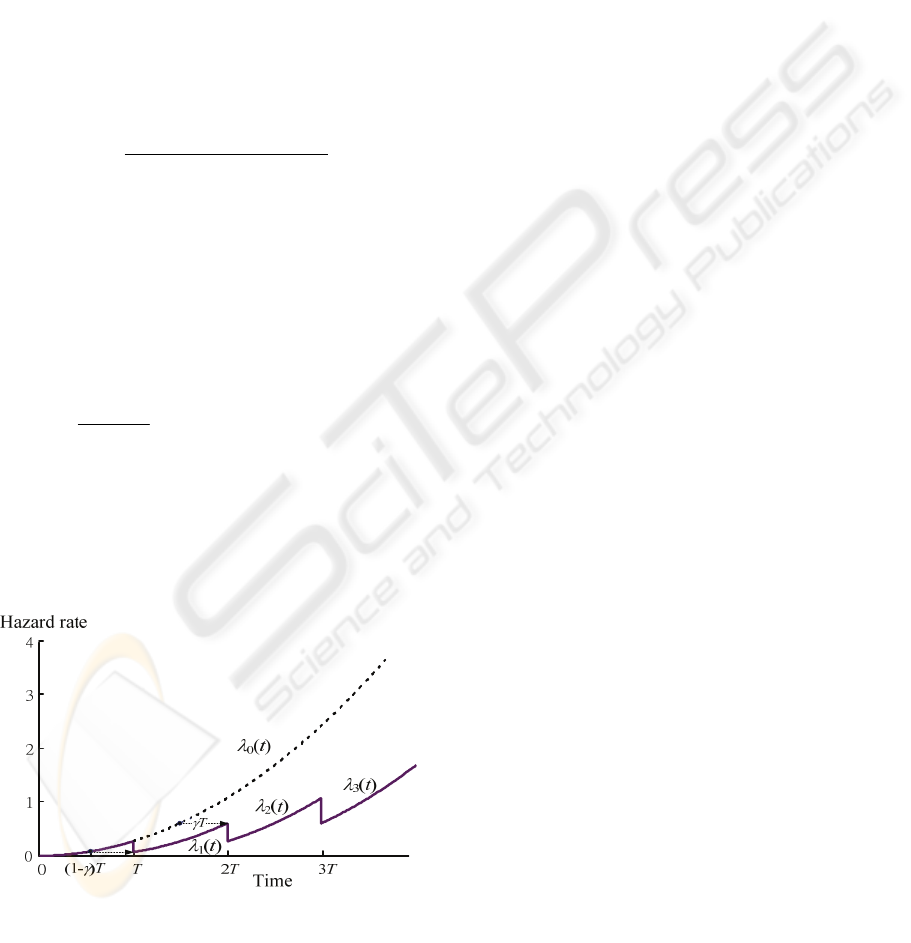
y The system’s age can be reduced γ units of time to
result in a younger age (called the effective age)
after each PM. Hence, the hazard rate function at
time t
i,j
in the i
th
PM cycle can be written as
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
326
λ
i
(t
i,j
) =
λ
(t
i,j
-iγ) =
λ
(w
i,j
).
(1)
y Minimal repair is performed when failure occurs
between each PM.
y The time required for performing PM, minimal
repair, or replacement is negligible.
2.3 The Theoretical Model
Based on the theoretical PM model with age
reduction proposed by Cheng et al. (2004) and Yeh
and Chen (2006), the optimal PM policy is obtained
by the following steps. The first step is to find the
expected cost rate function for the PM model as
shown below.
(1) (,)
(, ) ,
pm pr mr
NC CCTN
CT N
NT
−++Λ
=
(2)
where Λ(T, N) is the expected number of failures
occurred in the finite time span and is defined as
1
(1)
0
(, ) ()
N
iT
i
iT
i
TN tdt
λ
−
+
=
Λ=
∑
∫
(3)
with λ
i
(·) being defined in Eq. (1). Second step is to
obtain the time interval of PM (T) as a function of N
by taking the partial derivative of T of the above
expected cost rate function and letting it equal to
zero, i.e.,
(, )
0
CT N
T
∂
=
∂
Third, the optimal value T
*
and N
*
of the
theoretical model can be obtained by numerically
searching
min ( , ),
N
CT N
N = 1, 2, … since the cost
rate function is a convex function. The hazard rate
function of the PM model with age reduction is
illustrated in Figure 1.
Figure 1: The hazard rate function of the PM Model with
age reduction.
3 THE RV GENERATING
METHODS OF THE TBF
3.1 The Offset Inverse Transformation
Method
This RV generating method assumes that the
occurrence time of the last failure in the i
th
PM cycle
is irrelative to the occurrence time of the first failure
in the i+1
st
PM cycle. Thus, when the generated
occurrence time of the k
i
th
failure is within the i
th
PM
cycle but the occurrence time of the k
i
+1
st
failure
exceeds the i
th
PM cycle, i.e.,
,1
i
ik
t
+
> iT, we discard
the k
i
+1
st
failure and start to generate the occurrence
time for the first failure of the i+1
st
PM cycle.
According to the concept of the inverse
transformation method, if x is the time between
failures, then, we have
U = F(x). (4)
However, since the PM model assumes that the
minimal repair is performed at each failure occurred
between each PM. Therefore, we can re-write Eq.(4)
as
U
i,j
= F(x
i,j
|t
i,j-1
) = 1 - R(x
i,j
|t
i,j-1
). (5)
Then, for the age-reduction PM model, we apply
Eq.(1) to Eq. (5) and it can be resulted as the
following equation.
{
}
,1 ,
,1
,,,-1
1(|)exp (')'
for 0,1,..., ; 1, 2,...,
ij ij
ij
tx
ij ij ij i
t
i
URxt tdt
iNj k
λ
−
−
+
−= = −
==
∫
(6)
which, according to Eq. (1), can be expressed as
function of effective age as follows.
{
}
,1 ,
,1
,,,-1
1(|)exp ()
for 0,1,..., ; 1, 2,..., .
ij ij
ij
wx
ij ij ij
w
i
URxt tdt
iNjk
λ
−
−
+
−= = −
==
∫
(7)
where w
0,j
= t
0,j
, w
i,0
= t
i,0
– iγ = iT - iγ; w
i,j
= t
i,j
– iγ =
t
i,j-1
+ x
i,j
– iγ. When the TBF of a system is a
Weibull random variable, based in Eq. (7), we can
generate the TBF random variates by the following
equation.
{
}
1/
,,1,1
ln(1 )
for 0,1,..., ; 1, 2,..., .
ij ij ij ij
i
x
Uti ti
iNjk
β
β
β
θ
γγ
−−
⎡⎤
=
−−+− −+
⎣⎦
==
(8)
The algorithm for the offset inverse
transformation method is presented as follows.
(1) Specify the values of the following parameters:
β
,
θ
,
γ
, N, T, L and let i = 0.
RANDOM VARIATES GENERATING METHODS OF TIME-BETWEEN-FAILURES FOR THE REPAIRABLE
SYSTEMS UNDER AGE-REDUCTION PREVENTIVE MAINTENANCE
327

(2) Let t
i,0
= iT.
(3) Let j = 1.
(4) Generate random number U
i,j
.
(5) Obtain the value of x
i,j
according to Eq.(8);
let t
i,j
= t
i,j-1
+x
i,j
.
(6) If t
i,j
< iT, let j = j + 1 and go back to (4)
else go to (7).
(7) If t
i,j
< L, let i = i + 1 and go back to (2)
else stop.
It can be seen that the occurrence time of the first
failure in the i+1
st
PM cycle does not relate to the
occurrence time of the last failure (
,
i
ik
t
), i.e.,
t
i+1,1
= t
i+1,0
+ x
i+1,1
= (i+1)T + x
i+1,1
.
3.2 The Trace-back Inverse
Transformation Method
The proposed second method is modified from the
offset inverse transformation method. For the
following reasons: (1) the failure occurrence of the
system follows the non-homogenous Poisson
process (NHPP); (2) the PM is imperfect (i.e., the
PM will not renew the system to zero failure rate),
this generating method assumes that the occurrence
time of the first failure in the i+1
st
PM cycle is
affected by the occurrence time of the last failure in
the i
th
PM cycle. Hence, the theoretical concept for
the generation of x
i+1,1
is shown below.
1,1 , , 1,1 ,
, 1,1 , 1,1
,,
()Pr{ }
Pr{ } ( )
,
Pr{ } ( )
ii i
ii
ii
iik iki ik
ik i ik i
ik ik
Rx t T t x T t
Tt x Rt x
Tt Rt
++
++
′′
=>+ >
′
>+ +
==
′
>
where
,1,1
,1,1 1,1
(1)
1
(1)
0
()()
exp ( ) ( )
i
ik i
i
ik i i
i
lT t x
li
lT i T
l
Rt x Rt
tdt tdt
λλ
+
++
++
+
+
=
+=
⎡⎤
′′ ′′
=− −
⎢⎥
⎣⎦
∑
∫∫
and
,
1
(1)
,
0
()exp () ()
ik
i
i
i
lT t
ik l i
lT iT
l
R
ttdttdt
λλ
−
+
=
⎡⎤
′′ ′′
=− −
⎢⎥
⎣⎦
∑
∫∫
It turns out that
1,1
,
(1)
1,1 , 1
(1)
( ) exp ( ') ' ( ') ' .
i
i
ik
i
iT t
iik i i
tiT
Rx t t dt t dt
λλ
+
+
++
+
⎧⎫
⎡⎤
=− +
⎨⎬
⎢⎥
⎣⎦
⎩⎭
∫∫
Then, let
+1,1 , 1 1,1 ,
=1()
ii
iik iik
UU Rxt
++
=−
. For the
Weibull case, we can generate the first TBF random
variate of the i+1
st
PM cycle by the following
equation.
[]
()
[]
1/
,
1,1
+1,1
,
(1)( )
(1) ln(1 )
( 1) for 0 1 2 .
i
i
ik
i
i
ik
iT ti
x
iTi U
t i i , , ,...,N
β
β
β
β
β
γγ
γθ
γ
+
⎧⎫
+−+−
⎪⎪
=
⎨⎬
⎪⎪
−+ − − −
⎩⎭
−++ =
(9)
The algorithm for the trace-back inverse
transformation method is provided below.
(1) Specify the values of the following parameters:
β
,
θ
,
γ
, N, T, L.
(2) Let i = 0, t
0,0
=0.
(3) Let j = 1.
(4) Generate random number U
i,j
.
(5) Obtain the value of x
i,j
according to Eq.(8);
let t
i,j
= t
i,j-1
+x
i,j
.
(6) If t
i,j
< iT, let j = j + 1 and go back to (4)
else go to (7).
(7) If t
i,j
< L,
obtain the value of x
i+1,1
according to Eq.(9);
let t
i+1,1
=
,
i
ik
t
+ x
i+1,1
;
let i = i + 1 and j = 2;
go back to (4)
else stop.
It can be seen that the occurrence time of the first
failure in the i+1
st
PM cycle depends on the
occurrence time of the last failure (
,
i
ik
t
), i.e.,
t
i+1,1
=
,
i
ik
t
+ x
i+1,1
.
3.3 The Rejection Method
It can be seen from Eq.(4) or Eq.(5) that the hazard
rate function is changed when performing a PM.
This makes the formula for generating the TBF
random variates shown in Eq.(6) and Eq.(7) very
complicated. Therefore, the rejection method is
applied in this research.
In the rejection method, two random numbers,
say U
1
and U
2
, are required for generating each RV.
Suppose
λ
i
(t) is the hazard rate function of the i
th
PM
cycle. U
1
is used to generate a RV from a hazard
rate function with a simple formula, say
λ
(t) where
λ
(t) ≥
λ
i
(t) for any t ≥ 0. Then, the RV generated by
using U
1
is accepted if U
2
<
λ
i
(t)/
λ
(t).
In this research, we use the original hazard rate
function
λ
(t) (i.e., the hazard rate function before the
first PM) to generate the RV of the TBF
corresponding to U
1
. For the Weibull case, we can
obtain the TBF formula as the following equation.
1/
11 1
ln(1 )+( ) .
mmm
x
Ut t
β
ββ
θ
−−
⎡⎤
=− − −
⎣⎦
(10)
The algorithm of the rejection method is
presented as follows.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
328

(1) Specify the values of the following parameters:
β
,
θ
,
γ
, N, T, L.
(2) Let t
0,0
=0, t
0
=0.
(3) Let m = 0, i = 0, j = 1.
(4) Generate random number U
1
.
(5) Obtain the value of x
m
according to Eq. (10);
let t
m
= t
m-1
+x
i,j
.
(6) If t
m
< iT, go to (7)
else go to (10).
(7) Generate random number U
2
(8) Calculate λ(t
m
) and λ
i
(t
m
)=λ(t
m
-iγ).
(9) If
2
()/()
im m
Utt
λ
λ
≤
, let t
i,j
= t
m
; j = j+1; m = m+1;
go back to (4)
else j = j; m = m+1; go back to (4).
(10) If t
m
< L, let i = i + 1 and j = 1; go back to (7)
else stop.
It can be seen that the rejection method is easy to
use since it does not need to derive the formula of
R
i
(t) for i = 1, 2, …, N.
4 EXAMPLES AND DISCUSSION
In the examples, let the finite life time period (L) be
6 time units and the PM interval (T) be 1 time unit.
The values of parameters are set as: θ = 0.4; N = 5;
C
pm
= a+bi = 5+100i for the i
th
PM; C
mr
=3.1036.
Then, we construct 25 experiments for each RV
generating method, which consist of 5 different
β
values, each with 5 replicates. There are 30 runs for
each experiment. We compare the differences
between the mean number of failures obtained from
Eq. (3) and the sample averages from the three RV
generating methods. The analysis of variance
(ANOVA) for the number of failures generated is
also provided in Table 1. It can be seen that the
three RV generating methods do not have significant
different. Parameter
β
and the number of PM
performed do significantly affect the number of
failures generated, which demonstrates the validity
of the simulation models.
4.1 The Near-Optimal Solution
Table 2 shows the parameter values used in the
proposed simulation models as well as in the
theoretical model of Yeh and Chen (2006). By
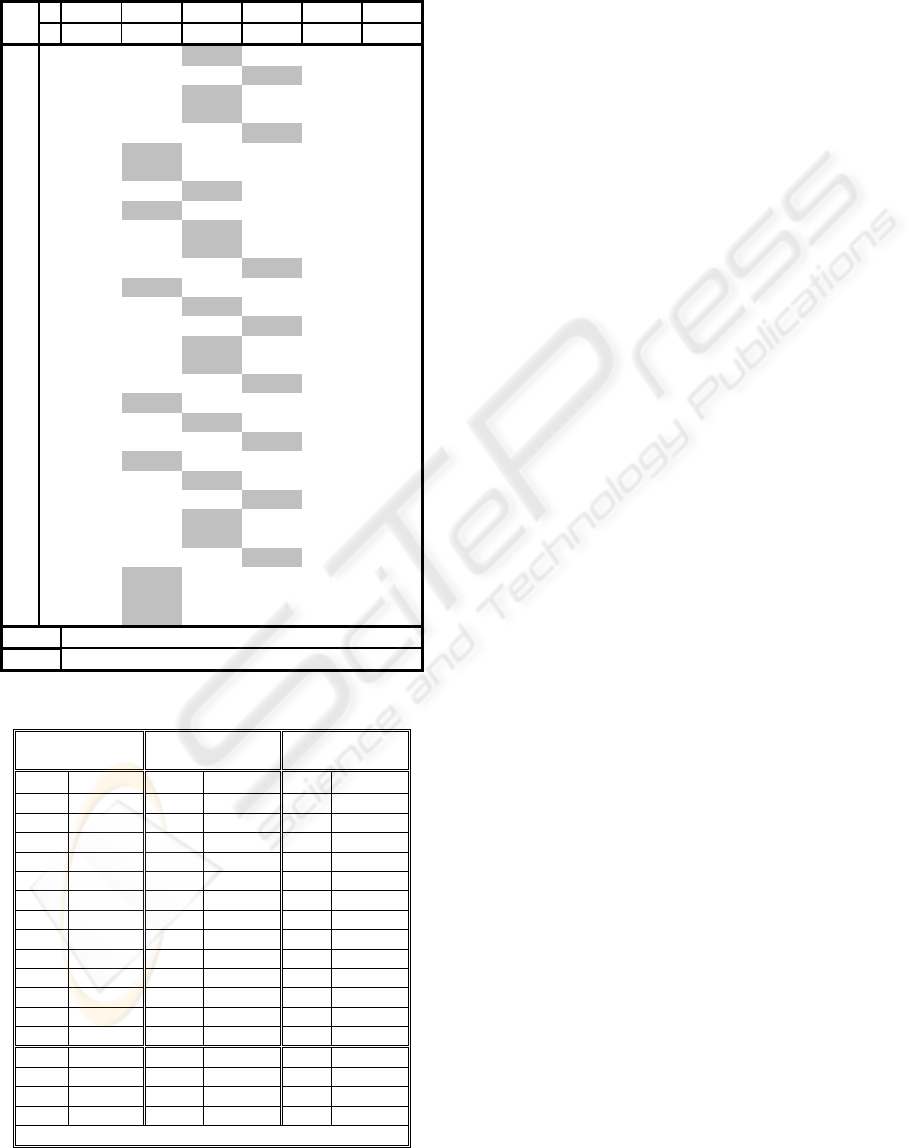
using the rejection method, Table 3 presents the 30-
run simulation results for N = 1 to 6. The smallest
Table 1: The ANOVA of the generated number of failures.
Table 2: Parameters applied in the PM model.
β θ L h a b C
m
3.2 0.4 2 0.19 5 100 3.1036
(best) total maintenance cost of each run is
highlighted by shadow background.
It can be seen from Table 3 that, for each N, the
average value of TC from the 30-run simulation is
very close to the value obtained by using the
theoretical method based on Yeh and Chen (2006).
Both methods (simulation and theoretical) provides
the same optimal policy of N
*
=3 and γ
*
=0.4781.
Again, it has demonstrated that the experiment
results obtained by simulation methods are
consistent with those obtained by the theoretical
model when large sample runs are generated.
It should be noted that the best solution of N, γ,
and TC (marked with shadow) resulted from each
simulation run are different from those obtained by
the theoretical model. It is because the optimal
solution of the theoretical model is obtained by
taking the expected cost rate over the infinite time
interval or over the large number of systems in a
finite time interval. However, the simulation
method considers the situations of a single system in
a finite time interval.
For a single system in a finite time span,
according to Table 3, the best solutions of each run
(with shadow) can be categorized into three near-
optimal policies: (N=2, γ=0.6667), (N=3, γ=0.4781),
and (N=4, γ=0.3655). Table 4 lists the simulation
runs in each near-optimal policy and presents the
average, the smallest, and the largest minimal TC of
the near-optimal policy. Among these best solutions,
the average of the minimal TC (184.1143) is
significantly different from the theoretical minimal
TC (189.7280). The results have demonstrated that
the theoretical PM model might not be suitable for a
single system over a finite time interval.
Hence, in practical, when considering a single
system to be preventively maintained in a finite time
period, especially for short time period, more than
one single near-optimal policy is suggested. In this
example, either (N=2, γ=0.6667) or (N=3, γ=0.4781)
RANDOM VARIATES GENERATING METHODS OF TIME-BETWEEN-FAILURES FOR THE REPAIRABLE
SYSTEMS UNDER AGE-REDUCTION PREVENTIVE MAINTENANCE
329
or (N=4, γ=0.3655) may be chosen as the best (near-
optimal) PM policy.
Table 3: The results of the 30 Simulation runs.
Run#
N 1 2
3
4 5 6
γ 1 0.6667
0.4781
0.3655 0.2957 0.2483
1 216.730 189.894
180.155
194.132 194.575 210.016
2 229.144 196.101 192.570
187.925
210.093 194.498
3 250.869 196.101
189.466
197.236 213.197 206.912
4 250.869 186.790
180.155
200.340 188.368 213.120
5 204.315 199.205 204.984
187.925
219.404 197.602
6 263.284
189.894
201.880 194.132 197.679 197.602
7 213.626
165.065
183.259 197.236 185.264 203.809
8 232.248 214.723
192.570
194.132 206.990 194.498
9 241.558
177.480
183.259 200.340 191.472 206.912
10 216.730 189.894
180.155
194.132 188.368 206.912
11 219.833 211.619
204.984
209.650 213.197 216.223
12 222.937 189.894 189.466
181.718
197.679 197.602
13 247.766
177.480
180.155 209.650 197.679 216.223
14 247.766 196.101
180.155
206.547 197.679 203.809
15 198.108 196.101 189.466
181.718
200.782 194.498
16 216.730 192.998
183.259
200.340 185.264 203.809
17 226.040 205.412
189.466
191.029 194.575 206.912
18 195.004 202.308 211.191
191.029
210.093 191.394
19 216.730
183.687
186.362 191.029 200.782 213.120
20 226.040 199.205
183.259
203.443 200.782 206.912
21 232.248 186.790 189.466
184.822
194.575 203.809
22 204.315
196.101
198.777 197.236 197.679 200.705
23 207.419 186.790
180.155
206.547 188.368 206.912
24 210.522 208.516 195.673
187.925
206.990 197.602
25 219.833 205.412
195.673
203.443 197.679 213.120
26 257.076 192.998
173.948
215.858 191.472 219.327
27 216.730 211.619 195.673
172.407
210.093 188.291
28 216.730
189.894
201.880 200.340 197.679 216.223
29 210.522
168.169
180.155 206.547 191.472 216.223
30 247.766
186.790
189.466 187.925 197.679 200.705
Avg. 225.316 193.101
189.569
195.891 198.92 204.843
Theo. 221.495 191.076
189.728
192.850 197.222 202.051
Table 4: The near-optimal Policies of the Simulation.
Policy 1
(N
*
=2, γ
*
=0.6667)
Policy 2
(N
*
=3, γ
*
=0.4781)
Policy 3
(N
*
=4, γ
*
=0.3655)
Run# Min. TC Run# Min. TC Run# Min. TC
6 189.8940 1 180.1552 2 187.9252
7 165.0652 3 189.4660 5 187.9252
9 177.4796 4 180.1552 12 181.7180
13 177.4796 8 192.5696 15 181.7180
19 183.6868 10 180.1552 18 191.0288
22 196.1012 11 204.9840 21 184.8216
28 189.8940 14 180.1552 24 187.9252
29 168.1688 16 183.2588 27 172.4072
30 186.7904 17 189.4660
20 183.2588
23 180.1552
25 195.6732
26 173.9480
Runs 9 Runs 13 Runs 8
Avg. 181.6177 Avg. 185.6462 Avg. 184.4337
Max. 196.1012 Max. 204.9840 Max. 191.0288
Min. 165.0652 Min. 173.9480 Min. 172.4072
Overall average of min. TC: 184.1143
5 CONCLUSIONS
The proposed three simulation methods are not
significant different in generating the time-between-
failure RVs .for the PM model with age reduction.
The rejection method seems simple and easy to use
in practical.
For the infinite time span, the results from the
simulation method are very close to those obtained
by the theoretical model. However, for a finite time
span, more than one near-optimal policy can be
obtained by the simulation method. Each of the
near-optimal solution can be the best PM policy for
any single system having a finite life time period.
The simulation results have demonstrated that the
theoretical PM model might not always suitable for
a single system in a finite time span.
The simulation method can be applied in solving
more complicated real world situation, such as the
consideration of the random shock in a PM model,
which is difficult to be solved by the theoretical
model.
ACKNOWLEDGEMENTS
This research has been supported by the National
Science Council of Taiwan under the project number
NSC96-2221-E-324-010.
REFERENCES
Cheng, C.-Y. and Liaw, C.-F., 2005. Statistical estimation
on imperfectly maintained system, European Safety &
Reliability Conference 2005 (ESREL 2005), Jun. 27-
30, 2005, Tri-City, Poland, pp 351-356.
Cheng, C.-Y. Liaw, C.-F., and Wang, M., 2004. Periodic
preventive maintenance models for deteriorating
systems with considering failure limit, 4
th
International Conference on Mathematical Methods in
Reliability—Methodology and Practices, Jun. 21-25,
2004, Santa Fe, New Mexico.
Murthy, D. N. P. and Nguyen, D. G., 1981. Optimal Age-
Policy with Imperfect Preventive Maintenance, IEEE
Transactions on Reliability Vol.R-30, No.1, pp.80-81.
Pongpech, J. and Murthy, D. N. P., 2006. Optimal
Periodic Preventive Maintenance Policy for Leased
Equipment, Reliability Engineering & System Safety,
Vol.91, pp.772-777.
Ross, S. M., 1997. Simulation, Academic Press, San
Diego, pp.62-85.
Yeh, R. H. and Chen, C. K., 2006. Periodical Preventive-
Maintenance Contract for a Leased Facility with
Weibull Life-Time, Quality & Quantity, Vol.40,
pp.303-313.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
330
