
PATH PLANNING WITH MARKOVIAN PROCESSES
Istvan Szoke, Gheorghe Lazea, Levente Tamas, Mircea Popa and Andras Majdik
Technical University of Cluj-Napoca, Daicoviciu Street, Cluj-Napoca, Romania
Keywords: Path planning, Navigation algorithms, Mapping, Mobile robots, Markovian processes.
Abstract: This paper describes the path planning for the mobile robots, based on the Markov Decision Problems. The
presented algorithms are developed for resolving problems with partially observable states. The algorithm is
applied in an office environment and tested with a skid-steered robot. The created map combines two
mapping theory, the topological respectively the metric method. The main goal of the robot is to reach from
the home point to the door of the indoor environment using algorithms which are based on Markovian
decisions.
1 INTRODUCTION
The first step in mobile robot navigation is to create
or to use a map and to localize itself in it (Thrun,
2003). An autonomous agent has to have the
following abilities: map learning or map creating,
localization and path planning. The map
representation can be metric or topological
(Borenstein, 1996). In the case of the metric
representation, the objects are replaced with precise
coordinates, the disadvantage of this representation
is that the precise distances can be very hard
calculated, the map inaccuracies and the dead-
reckoning errors are appearing often. The
topological representation only considers places and
the relations between them, its disadvantages would
be the unreliable sensors which can not detect
landmarks and perceptual aliasing. The second step
in an agent’s navigation process is the localization,
which is strongly dependent to the map learning
phase. This problem is common known as,
Simultaneous localization and mapping (SLAM).
SLAM is of one of the most important researched
subfields of robotics (Fox, 2003). To plan a route to
a goal location, the agent must be able to estimate its
position. The most well known methods to do this,
are the relative and absolute position measurements
(Thrun, 2004). For the relative position
measurements the most used methods are the
odometry and inertial navigation, respectively for
the absolute position estimation, the active beacons,
artificial and natural landmark recognition and map-
based positioning (Thrun, 2003). Path planning is
defined as follows: is the art of deciding which route
to take, based on and expressed in terms of the
current internal representation of the terrain.
The definition of the path finding: the execution
of this theoretical route, by translating the plan from
the internal representation in terms of physical
movement in the environment.
2 PATH PLANNING PROCESS
The effectiveness of a search can be measured in
three ways. Does it bring a solution at all, it is a
good solution (the one with a low path cost), and
what is the search cost associated with the time and
memory required to find a solution. The total cost of
a search is defined as the sum of the path cost and
the search cost. Route finding algorithms are used in
a variety of applications, such as airline travel
planning or routing in computer networks. In the
case of the robot navigation, the agent can move in a
continuous space with an infinite set of possible
actions and states. In case of a circular robot which
is moving on a flat surface, the space is two-
dimensional, but in case of a robot that has arms and
legs, the search space will be many-dimensional.
2.1 Markovian Processes
These kinds of processes integrate topological and
metric representation as well, utilizing both action
and sensor data in determining the robot position
(Cassandra, 1996). Bayes rule is used to update the
479
Szoke I., Lazea G., Tamas L., Popa M. and Majdik A.
PATH PLANNING WITH MARKOVIAN PROCESSES.
DOI: 10.5220/0002209704790482
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-674-000-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

position distribution after each action and sensor
reading (Koenig, 1996). In a Markov model actions
occur in discrete time. To solve a Markov Decision
Problem requires calculating an optimal policy in a
stochastic environment with a transition model
which satisfies the Markovian property.
2.2 Markov Decision Problem
The problem of calculating an optimal policy in a
stochastic environment with a known transition
model is called a Markov decision problem
(MDP). It can be expressed, that a problem which
has the Markov property, its transition model from
any given state depend only on the state and not on
previous history. Knowledge of the current state is
all that is required in making a decision. A transition
model is one which gives, for each state s and action
a the resulting distribution of states if the action a
was executed in s. A Markov decision process is a
mathematical model of a discrete-time sequential
decision problem (Littman, 2009). MDP is defined
as a four tuple
〉〈 RPAS ,,,
(Regan, 2005), where
S
is the finite set of environment states,
A is the set of
actions,
P
is the set of action dependent transition
probabilities,
R
is the reward function.
RASR →×:
is the expected reward for taking
each action in each state. To maximize the expected
reward over a sequence of decisions is the main goal
of this problem. In an ideal case, the agent should
take actions that maximize future rewards. In an
MDP, the expected future reward is dependent only
on the current state and action, so it must exist a
stationary policy which will guarantee that the
maximum expected rewards are received, if taken
starting from the current state. The goal of any
method to solve a MDP is to identify the optimal
policy. The optimal policy is one that will maximize
the expected reward starting from any state. If we
would enumerate all of the possible policies for a
state space, and then pick the one with the maximum
expected value function, the method would be
intractable, because the number of policies is
exponential in the size of the state space. The
traditional approach to solving sequential decision
problems is dynamic programming. For applying
this type of programming we need precise
information about
P
, the transition probabilities and
R
, the reward function. Unfortunately, dynamic
programming is computationally expensive in large
state spaces.
2.2.1 Value Iteration Algorithm
This algorithm is used to calculate the optimal
policy for the given environment. The main idea of
the algorithm is to calculate the utility for each of
the states, note with U(state). These utility values
are used for select an optimal action in each state.
∑
⋅+←
+
)(max)()(
1
jUMiRiU
t
a
ij
a
t
(1)
Where R is called the reward function,
a
ij
M
is
the transition model, the probability of reaching state
j if action a is taken in state i, and U is the utility
estimate. It’s an iterative algorithm, as
∞
>−t
, the
utility values will converge to stable values.
Equation (1) is the basis for dynamic programming,
which was developed by Richard Bellman (Russell,
1995). Using this type of programming sequential
decision problems can be solved.
function VALUE_ITERATION (MDP)
input: MDP with states S,
transition model T,
reward function R
repeat
U = U’
for each state s do
∑
⋅+←
+
)(max)()(
1
jUMiRiU
t
a
ij
a
t
until close enough(U,U’)
return U.
2.2.2 Policy Iteration Algorithm
After the utility values are calculated for all the
states, the corresponding policy is calculated using
the equation (2).
∑
⋅=
j
a
ij
a
jUMipolicy )(maxarg)(
(2)
The basic idea of the algorithm is that by picking
a policy, then calculate the utility of each state given
that policy. The policy is updated after the new
utility is inserted in the equation (3). The RMS
(Root Mean Square) (Russell, 1995) method is used,
to know how many iterations has to be done. The
RMS error of the utility values are compared to the
correct values.
function POLICY_ITERATION (MDP)
input: MDP with states S,
transition model T,
reward function R
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
480

repeat
U = Policy_Evaluation(
π
,U,MDP)
unchanged?=true
for each state s do
∑
⋅=
j
a
ij
a
jUMipolicy )(maxarg)(
unchanged?=false
until unchanged?
return
π
.
2.3 Partially Observable Markov
Decision Problem (POMDP)
This problem like the simple MDP is part of the
sequential decision problems family. This can occur
if the agent’s environment is an inaccessible one,
which means that, there is not enough information in
order to determine the state or the associated
transition probabilities, which means that the agent
cannot directly observe that state. As a solution to
this problem a new MDP has to be constructed,
where the probability distribution plays the role of
the state variable. It will end in a new state space,
which will have real value probabilities, but they are
infinite. For real-time applications even MDPs are
hard to compute, and POMDP need approximations
in order to obtain the optimal policy. Due to the fact
that the agent doesn’t have direct access to the
current state, the POMDP algorithms need the whole
history of the process, which means that it will lose
it’s Markovian property. This step is replaced by
maintaining a probability distribution over all of the
states, it gives us the same result as if we would
keep the entire history. Between decisions the state
can change, unlike in an MDP where state changes
occur just due decisions. A variety of algorithms
have been developed for solving POMDP. The
Whitness algorithm (Littman, 1994) finds the
solution using value iteration, it has been used with
16 states. In case of a more complex state space this
algorithm would not be efficient. Another approach
by (Littman, 1995), is a hybrid one, which is able to
determine high quality policies with approximately
100 states. The realistic problems usually require
thousands of states, so questions to this field remain
open (Regan, 2005).
3 EXPERIMENTAL RESULTS
The described algorithm in this paper was tested
using MobileSim simulator. The Pioneer AT robot’s
starting point is the Home Point situated in the first
cell of the map. The robot has to reach the goal point
which is the door of the room. The first step was to
create the map of the room, where to robot will
navigate. The size of the room is 7m wide and 8.5m
long. The area of the room was divided in cells with
area of
2
1m
. In Figure 1, the created map can be
seen, with the most representative points, like the
Home Point and the Goal Point. The other visible
objects from the map, are obstacles like desks,
shelves and supportive walls.
Figure 1: The map of the office environment.
The cells which represent an obstacle, their
utility is zero, for the other cells, the iterative
algorithm computes until the value between two
consecutive utility value, for the same cell, is not
more than 0.015. The initial value for a cell is -0.04,
the utility value for the Goal Point is 1, and for a
state which should be avoided, it has a value of -1.
In a real world environment a state with utility -1,
can be a whole in the ground or a state, from where
the robot would get easily lost and use all of its
power, due to this fact the agent must be able to
reach his goal. The path shown in Figure 2, is the
most shortest, what the robot can have. In order to
avoid to get close to the state which has a utility of -
1, the presented algorithm was applied to obtain
another path. The scope of the path which will be
obtained is to not have immediate neighbours to the
cell which has utility of -1.
Figure 2: The shortest path.
PATH PLANNING WITH MARKOVIAN PROCESSES
481
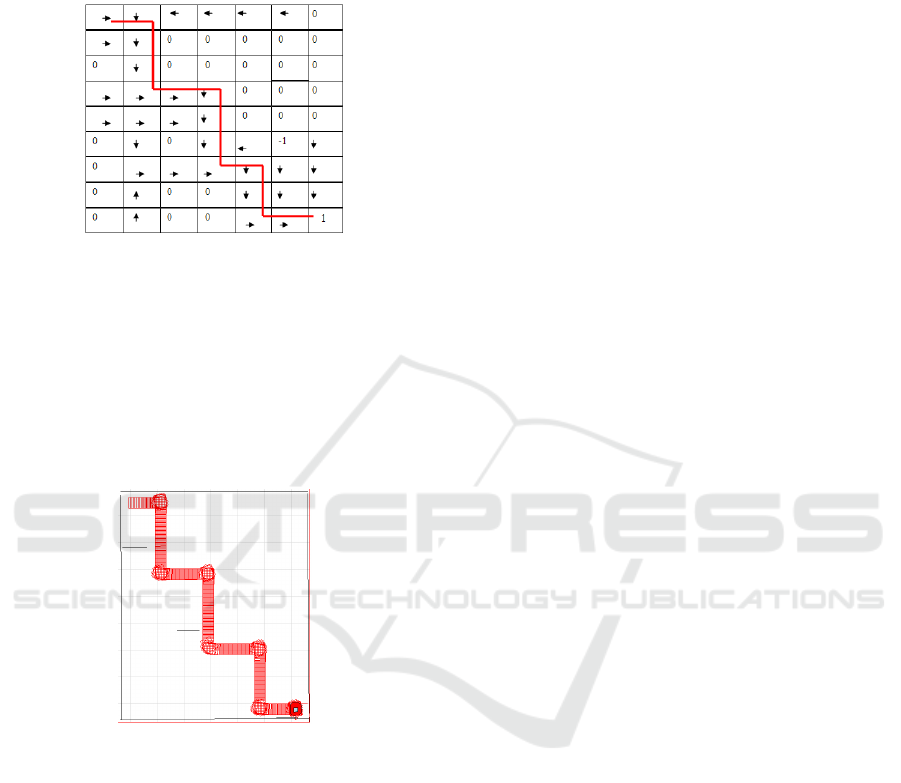
After 20 iterations of the Value Iterative
algorithm, the final utility values were obtained. In
Figure 3, the policies are represented, which were
obtained after applying the Policy Algorithm.
Figure 3: The optimal policy values.
The cells with a higher utility value are more
valuable for this algorithm than the states with a
lower utility value. As shown in Figure 3, the
optimal path has been found, the robot achieving to
the door without getting close to the cell with utility
-1, state which gets the lowest global reward.
In Figure 4, is represented the found path after
testing with MobileSim.
Figure 4: The found path using the presented algorithms.
The agent obtained an autonomous behaviour as
presented in Figure 4 successfully avoids obstacles
and the state with utility -1, it reach to the goal point
which is the door of the office environment. As
shown in Figure 2, the shortest path is not the path
with the least cost (LaValle, 2006).
4 CONCLUSIONS
The main focus of this paper was to present the
algorithms which are solving MDPs for path
planning in mobile robots navigation. In a well
known environment and with all the states
observable, the agent is able to avoid obstacles and
to navigate to the desired point.
5 FUTURE WORK
It is intended to create the map of the environment in
a dynamic way. By the advance of the robot, the
map would be created using the fusion of the data
obtained by multiple sensors. The map will contain
dynamic objects as well, human beings, which will
have to be recognized and inserted in the map and to
determine the projected positions for them.
REFERENCES
Cassandra, T., Kaelbing L., Kurien, J., 1996. Acting under
uncertainty: Discrete bayesian models for mobile-
robot navigation. IEEE/RSJ International Conference
on Intelligent Robots and Systems.
Fox, D., Hightower J., 2003. Bayesian Filtering for
Location Estimation. IEEE Pervasive Computing, vol.
2, no. 3, pp. 24-33, doi:10.1109/MPRV.2003.1228524.
LaValle, S., 2006. Planning algorithms. Cambridge
University Press.
Littman, M,. 1994. The Whitness algorithm: Solving
partially observable Markov decision processes. Tech.
Rep. CS-94-04
Littman, M. L., 2009. A tutorial on partially observable
Markov decision processes. Journal of Mathematical
Psychology.
Regan, K., 2005. The advisor-POMDP: A principled
Approach to Ttrust through Reputation in Electronic
Markets. Proceedings of the third annual conference
on privacy, security and trust, PST..
Thrun, S., 2003. Learning Occupancy Grid Maps with
Forward Sensor Models. Autonomous Robots, v.15
n.2, p.111-127.
Thrun, S., Burgard, W., 2004. A Probabilistic Approach to
Concurrent Mapping and Localization for Mobile
Robots. Springer Netherlands.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
482
