
TOWARDS SPEAKER-ADAPTIVE SPEECH RECOGNITION BASED
ON SURFACE ELECTROMYOGRAPHY
Michael Wand and Tanja Schultz
Cognitive Systems Lab, University of Karlsruhe, Am Fasanengarten 5, Karlsruhe, Germany
Keywords:
Speech recognition, Electromyography, Silent speech.
Abstract:
We present our recent advances in silent speech interfaces using electromyographic signals that capture the
movements of the human articulatory muscles at the skin surface for recognizing continuously spoken speech.
Previous systems were limited to speaker- and session-dependent recognition tasks on small amounts of train-
ing and test data. In this paper we present speaker-independent and speaker-adaptive training methods which
for the first time allows us to use a large corpus of data from many speakers to reliably train acoustic models.
On this corpus we compare the performance of speaker-dependent and speaker-independent acoustic models,
carry out model adaptation experiments, and investigate the impact of the amount of training data on the over-
all system performance. In particular, since our data corpus is relatively large compared to previous studies,
we are able for the first time to train an EMG recognizer with context-dependent acoustic models. We show
that like in acoustic speech recognition, context-dependent modeling significantly increases the recognition
performance.
1 INTRODUCTION
Automatic Speech Recognition (ASR) has now ma-
tured to a point where it is successfully deployed in a
wide variety of every-day life applications, including
telephone-based services and speech-driven applica-
tions on all sorts of mobile personal digital devices.
Despite this success, speech-driven technologies
still face two major challenges: first, recognition per-
formance degrades significantly in the presence of
noise. Second, confidential and private communica-
tion in public places is difficult due to the clearly au-
dible speech.
In the past years, several alternative techniques
were proposed to tackle these obstacles, the use of
bone-conducting and throat microphones for more re-
liable recognition in noisy environments or the recog-
nition of whispered speech (Jou et al., 2005) for con-
fidential conversations in the public or for quiet com-
munication that does not disturb bystanders. Other
approaches include using optical or ultrasound im-
ages of the articulatory apparatus, i.e. (Hueber et al.,
2007), or subvocal speech recognition (Jorgensen and
Binsted, 2005).
In this paper, we present our most recent investi-
gations in electromyographic (EMG) speech recogni-
tion, where the activation potentials of the articulatory
muscles are directly recorded from the subject’s face
via surface electrodes
1
.
In contrast to many other technologies, the ma-
jor advantage of EMG is that it allows to recognize
non-audible, i.e. silent speech. This makes it an inter-
esting technology not only for mobile communication
in public environments, where speech communication
may be both a confidentiality hazard and an annoying
disturbance, but also for people with speech patholo-
gies.
Research in the area of EMG-based speech recog-
nition has only a short history. In 2002, (Chan et al.,
2002) showed that myoelectric signals can be used
to discriminate a small number of words. Other re-
lated works reported success in several different as-
pects of EMG speech recognition (Jorgensen and Bin-
sted, 2005; Maier-Hein et al., 2005). In 2006, (Jou
et al., 2006b) showed that speaker dependent recogni-
tion of continuous speech via EMG is possible. The
recognition accuracy in this task could be improved
by a careful design of acoustic features and signal
1
Strictly spoken, the technology is called surface elec-
tromyography, however we use the abbreviation EMG for
simplicity.
155
Wand M. and Schultz T. (2009).
TOWARDS SPEAKER-ADAPTIVE SPEECH RECOGNITION BASED ON SURFACE ELECTROMYOGRAPHY.
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, pages 155-162
DOI: 10.5220/0001549601550162
Copyright
c
SciTePress
preprocessing (Wand et al., 2007), and advances in
acoustic modeling using articulatory features in com-
bination with phone models (Jou et al., 2006a). How-
ever, the described experiments were based on rela-
tively small amounts of data, and consequently were
limited to speaker-dependent modeling schemes. In
(Maier-Hein et al., 2005), first results on EMG recog-
nition across recording sessions were reported, how-
ever these experiments were run on a small vocabu-
lary of only 10 isolated words.
This paper reports for the first time EMG-based
recognition results on continuously spoken speech
comparing speaker-dependent, speaker-adaptive, and
speaker-independent acoustic models. We investigate
different signal preprocessing methods and the poten-
tial of model adaptation. For this purpose we first
develop generic speaker independent acoustic models
based on a large amount of training data from many
speakers and then adapt these models based on a small
amount of speaker specific data.
The baseline performance of the speaker-
dependent EMG recognizer is 32% WER on a testing
vocabulary of 108 words (Jou et al., 2006b). The
training data of this baseline recognizer consisted of
380 phonetically-balanced sentences from a single
speaker, which is about 10 times larger than the
training set we use for the speaker-dependent systems
reported in this paper (see below for details on the
training data).
The paper is organized as follows: In section 2, we
describe the used data corpus and the method of data
acquisition. In section 3, we explain the setup of the
EMG recognizer, the feature extraction methods, as
well as the different training and adaptation variants.
In section 4, we present the recognition accuracy of
the different methods and section 5 concludes the pa-
per.
2 DATA ACQUISITION
For data acquisition, 13 speakers were recorded. Each
speaker recorded two sessions with an in-between
break of about 60-90 minutes, during which the elec-
trodes were not removed. The recordings were col-
lected as part of a psychobiological study investigat-
ing the effects of psychological stress on laryngeal
function and voice in vocally normal participants (Di-
etrich, 2008; Dietrich and Abbott, 2007). The sen-
tence recordings were obtained at the beginning and
at the very end of the stress reactivity protocol. Partic-
ipants were recruited at the University of Pittsburgh,
Carnegie Mellon University, and Chatham University
for a speech recognition study, but were also con-
fronted with an impromptu public speaking task.
One session consisted of the recording of 100 sen-
tences, half of which were read audibly, as in normal
speech, while the other half were mouthed silently,
without producing any sound. In order to obtain com-
parable results to previous work, we report recogni-
tion results from the audibly spoken sentences only.
Each block of audible and mouthed utterances had
two kinds of sentences, 40 individual sentences that
were distinct across speakers and 10 “base” sentences
which were identical for each speaker. We used the
individual block for training and the “base” sentences
as test set.
The corpus of audible utterances had the follow-
ing properties:
Speakers 13 females speakers aged
18 - 35 years with no
known voice disorders
Sessions 2 sessions per speaker
Average Length
(total) 231 seconds per session
(training set) 179 seconds
(test set) 52 seconds
Domain Broadcast News
Decoding vocabulary 101 words
The total duration of all audible recordings was
approximately 100 minutes (77.5 minutes training set,
22.5 minutes test set).
During any session, “base” and individual sen-
tences were recorded in a randomized order.
In order to compare our results with previous
work, we additionally use the data set reported in (Jou
et al., 2006b), which consists of a training set of 380
phonetically balanced sentences and a test set of 120
sentences with a duration of 45.9 and 10.6 minutes,
respectively.
This results in a corpus of 14 speakers, where
speaker 14 (with only one session) corresponds to the
speaker from (Jou et al., 2006b) described above and
is treated separately. In the results section, a result
denoted with e.g. 3-2 means: Speaker 3 (out of 14),
session 2 (out of 2).
The EMG signals were recorded with six pairs
of Ag/Ag-CL electrodes attached to the speaker’s
skin capturing the signal of the articulatory muscles,
namely the levator angulis oris, the zygomaticus ma-
jor, the platysma, the orbicularis oris, the anterior
belly of the digastric and the tongue. Eventually, the
signal obtained from the orbicularis oris proved un-
stable and was dropped from the final experiments.
The EMG signals were sampled at 600 Hz and fil-
tered with a 300 Hz low-pass and a 1 Hz high-pass
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
156

filter.
In addition, the audio signal was recorded simul-
taneously using a professional head-mounted micro-
phone. Note that the microphone attachment did not
interfere with the EMG recordings. Details regarding
the EMG data acquisition setup can be found in (Jou
et al., 2006b), most of the information therein also ap-
plies to this work. See picture 1 for an example of the
electrode placement.
Figure 1: Electrode Positioning.
3 EMG-BASED SPEECH
RECOGNIZER
The initial EMG recognizer was the same one as in
(Wand et al., 2007), which in turn was set up ac-
cording to (Jou et al., 2006b). It used an HMM-
based acoustic modeling, which was based on fully
continuous Gaussian Mixture Models. For the ini-
tial context-independent recognizer there were 136
codebooks (three per phoneme, modeling the begin-
ning, middle and end of a phoneme, and one silence
codebook). It should be noted that due to the small
amount of training data, it could be observed that
most speaker dependent codebooks had about one to
four Gaussians after the initial merge-and-split code-
book generation.
The training concept works as follows: The time-
aligned training data is used either for a full training
run, or we use pre-trained models and adapt them to
the current task. The latter is especially important
since it allows setting up a recognizer with a very
small amount of individual training data.
During the decoding, we use the trained acoustic
model together with a trigram language model trained
on Broadcast News data. The testing process consists
of an initial testing run followed by a lattice rescoring
in order to obtain optimal results.
In section 4.5, we present our investigations on us-
ing context-dependent modeling for the EMG recog-
nizer.
3.1 Initialization
In order to find a time alignment for the training
sentences, the audio data which had been simulta-
neously recorded was used. The audio data was
forced-aligned with a Broadcast News (BN) speech
recognizer trained with the Janus Recognition Toolkit
(JRTk). The recognizer is HMMbased, and makes use
of quintphones with 6000 distributions sharing 2000
codebooks. The baseline performance of this system
is 10.2% WER on the official BN test set (Hub4e98
set 1), F0 condition (Yu and Waibel, 2000).
Previously, (Jou et al., 2006a) demonstrated the
anticipatory effect of EMG signals compared to audio
signals and showed that taking this effect into account
significantly improves performance. Accordingly, we
modeled this effect by delaying the EMG signal for
an amount of 0 ms to 90 ms (in steps of 10 ms), since
in (Jou et al., 2006a) the optimal delay is found to be
around 30 ms to 60 ms. The effect of this delaying is
charted in section 4 and indicates that the best perfor-
mance is to be found at 50 ms. Therefore, we report
results for the remainder of experiments at 50 ms de-
lay.
3.2 Feature Extraction
We compare two methods for feature extraction:
Time-domain Features and Wavelet Transform as in
(Wand et al., 2007).
For the time-domain features, we use the defini-
tions following (Jou et al., 2006b): For any feature
f ,
¯
f is its frame-based time-domain mean, P
f
is its
frame-based power, and z
f
is its frame-based zero-
crossing rate. S(f, n) is the stacking of adjacent frames
of feature f in the size of 2n + 1 (−n to n) frames. In
these computations, we used a frame size of 27 ms
and a frame shift of 10 ms. These values are reported
as giving optimal results by (Walliczek et al., 2006).
In the above work, the best WER was obtained
with the E4 feature defined as:
E4 = S(f2, 5), where f2 = [
¯
w, P
w
, P
r
, z
r
,
¯
r].
For comparison, we use a Redundant Discrete
Wavelet Transform (see e.g. (Shensa, 1992)) with a
14-tap q-shift filter according to (Kingsbury, 2000).
We perform a wavelet decomposition to decompose
level 5 and use both detail and approximation coeffi-
cients as features. The transformed signal is resam-
pled to obtain a 10 ms frame shift as for the E4 fea-
ture.
In both training methods, we performed a stacking
of the features from the five EMG channels to create
a final “joined” feature consisting of the synchronized
data from all channels.
TOWARDS SPEAKER-ADAPTIVE SPEECH RECOGNITION BASED ON SURFACE ELECTROMYOGRAPHY
157
3.3 Training Process
A full training run consisted of the following steps:
First, an LDA transformation matrix for feature di-
mensionality reduction was calculated based on the
labeled data. The diemnsionality of the final feature
was set to 32 according to (Jou et al., 2006b). Initial
codebooks were created by a merge-and-split algo-
rithm in order to adapt to the small amount of training
data and to compensate for differences in the avail-
able number of samples per phoneme. After this, four
iterations of Viterbi EM training were performed to
improve the initial models.
3.4 Across-Speaker Experiments and
Adaptation
We performed speaker adaptive training by initially
training acoustic models based on the training data of
all speakers but the two sessions of the test speaker.
On the trained models, we tested with the test set of
the respective test speaker (“cross-speaker training”).
In the adaptation experiments, we performed MLLR-
based speaker adaptation of the models prior to the
test (“cross-speaker training + adaptation”).
3.5 Testing
For decoding, we use the trained acoustic model to-
gether with a trigram BN language model. We re-
stricted the decoding vocabulary to the words appear-
ing in the test set. This resulted in a test set of 10 sen-
tences per speaker with a vocabulary of 101 words.
On the test sentences, the trigram-perplexity of the
language model is 24.24.
The testing process uses lattice rescoring in order
to determine the optimal weighting of the language
model compared to the acoustic model.
4 EXPERIMENTAL RESULTS
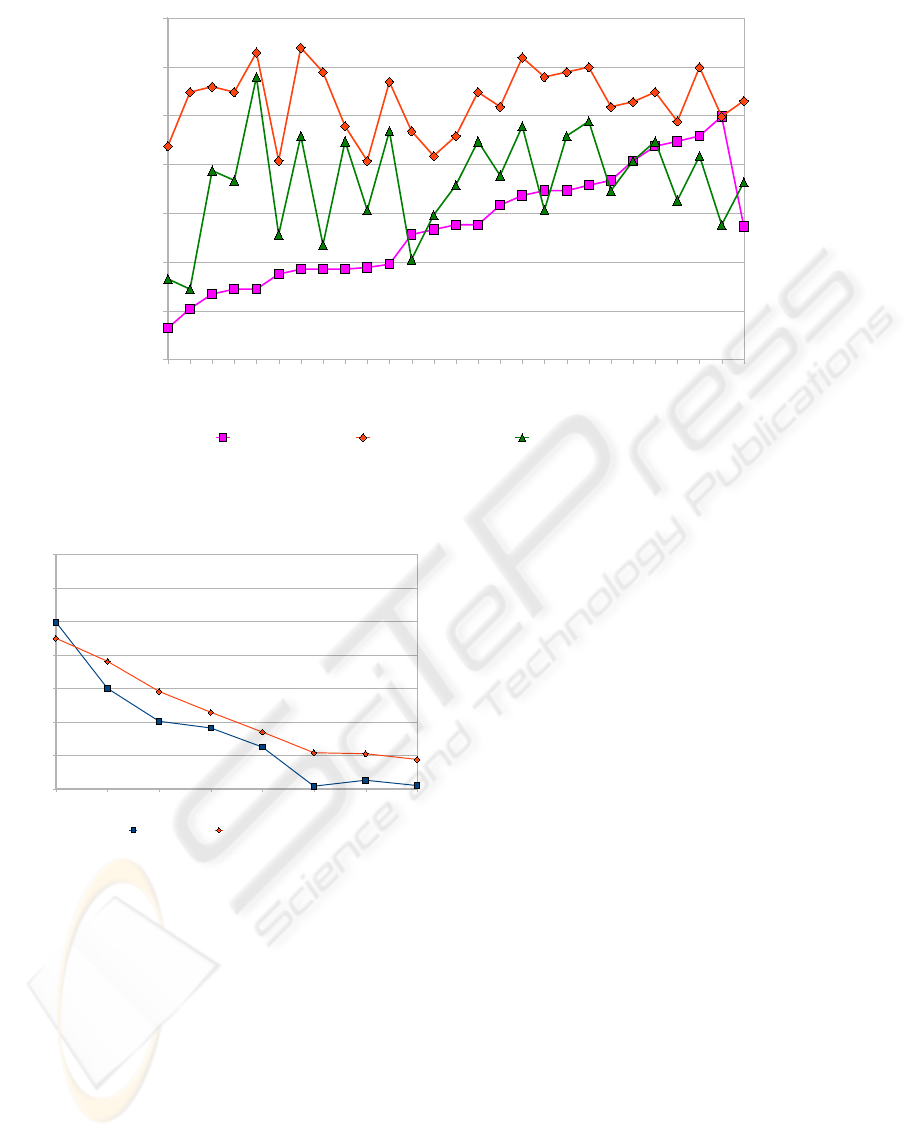
4.1 Speaker-Dependent Training
Figure 2 shows the word error rates of the speaker-
dependent recognition systems trained on the train-
ing data of one session and tested on test data from
the same session. The average performance of the
recognizer is 57.27% with the E4 preprocessing and
67.98% with RDWT (Wavelet) preprocessing. The
E4 preprocessing seems to be consistently better than
the RDWT across the speakers and sessions: The E4
preprocessing, which was introduced by (Jou et al.,
2006b), remains the current state-of-the-art for EMG
speech recognition. Wavelet preprocessing produces
a higher WER in most cases. While the Wavelet per-
formance generally follows the same trend as the E4
performance, we see a notable exception for speakers
10 and 11.
Overall we conclude from Figure 2 that the per-
formance of EMG speech recognition varies consid-
erably over speakers and even varies between differ-
ent sessions of the same speaker. In general, the vari-
ance within speaker is smaller than across speakers,
i.e. the two word error rates of the two sessions of
the same speaker are similar. However, there are ex-
ceptions, such as for speaker 3, 4, 5, and 7. Fur-
thermore, no pattern can be observed between order
of session and performance. The variance within the
data may be attributed to the challenges in longer du-
ration EMG recording, namely that the EMG signal
highly depends on the electrode contact, skin conduc-
tance, and environmental changes.
3-2
6-1
1-2
10-2
5-2
7-1
5-1
6-2
11-2
11-1
1-1
4-1
7-2
3-1
12-2
13-1
13-2
9-1
12-1
10-1
2-2
2-1
4-2
9-2
8-2
8-1
Average
30.00%
40.00%
50.00%
60.00%
70.00%
80.00%
90.00%
100.00%
Speaker-dependent
training
Wavelets (RDWT, q-shift
filter)
Session
WER
Figure 2: Speaker-dependent WER: E4 vs. RDWT.
4.2 Audio Delay
To investigate if the findings of (Jou et al., 2006a) on
the anticipatory effect of the EMG signal carry over to
multiple speakers, we trained the speaker-dependent
recognizer with the E4 feature for all speakers and for
EMG signal delays in the range of 0 ms to 90 ms.
The average performance of the recognizers for
speakers 1 to 13 is charted in Figure 3. It can be
seen that the optimal delay is achieved at about 50 ms,
which confirms the results of (Jou et al., 2006b). For
a single speaker, the curve may be less smooth than
the average, but in almost all cases the optimal delay
for each speaker was in the range of 30 ms to 60 ms.
Experiments in (Jou et al., 2006a) indicated that the
anticipatory behavior of the EMG signal may not be
uniform, but depends on the muscle group involved in
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
158

0 ms 10 ms 20 ms 30 ms 40 ms 50 ms 60 ms 70 ms 80 ms 90 ms
52.00%
54.00%
56.00%
58.00%
60.00%
62.00%
64.00%
66.00%
68.00%
Average performance
across speakers 1 to 13
EMG Signal Delay
WER
Figure 3: Comparison of Word Error Rates with Different
EMG Delays.
producing the respective sounds; this may explain the
variability of the optimal delay.
4.3 Cross-Speaker and Adaptive
Experiments
In the following experiments we compare three train-
ing scenarios:
• Speaker-Dependent Training: As above, the sys-
tem is trained and tested with data from one
speaker and one session only.
• Cross-Speaker Training: The system is trained on
all sessions from all speakers except the two ses-
sions from the test speaker. The system is tested
on the test data of one session.
• Cross-Speaker Training + Adaptation: Like
Cross-Speaker Training, but the resulting sys-
tem is then adapted toward the test speaker us-
ing MLLR adaptation (Leggetter and Woodland,
1995) on the training data from one session. As
above, testing is done on the test data from the
same session.
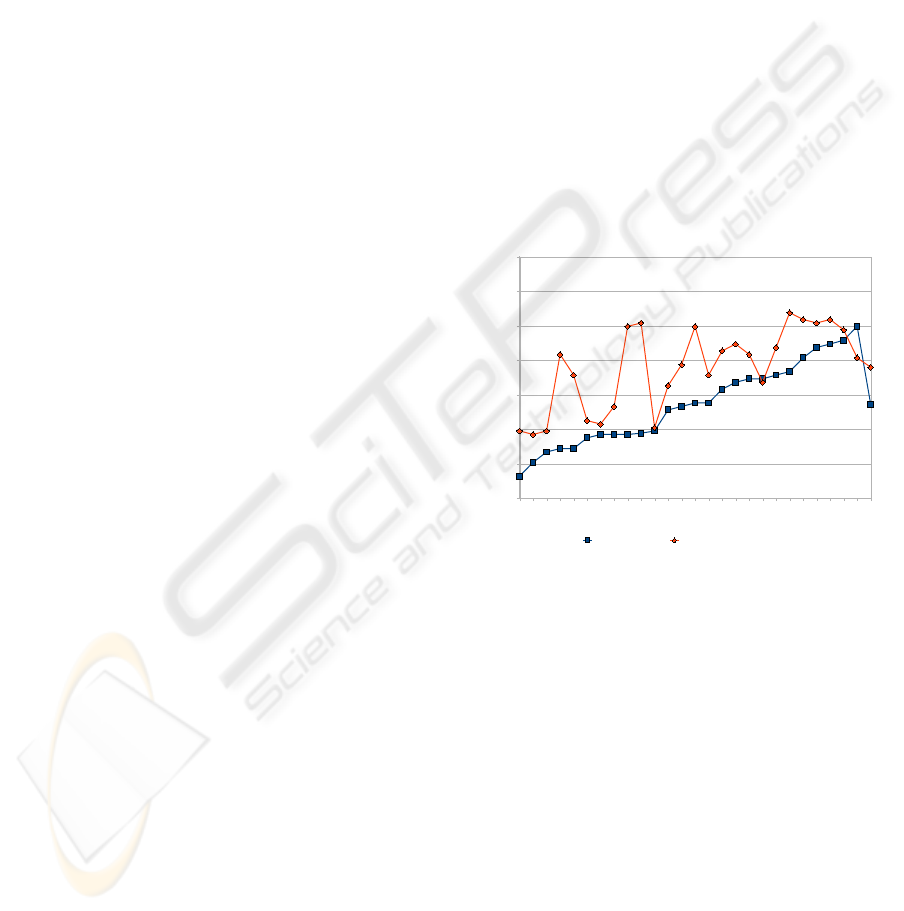
Figure 4 shows the results of these experiments
and indicates that the speaker-dependent and adaptive
systems clearly outperform the speaker-independent
system. This is not very surprising as the speaker in-
dependent models have to capture speaker variabil-
ities but at the same time suffer from slight vari-
ations in the electrode positioning across speakers.
Furthermore, we see that speaker dependent model
training achieves better results than MLLR adaptation
for most of the speakers and sessions. However for
sessions where speaker-dependent training performs
badly, particularly for speakers 8 and 9 and to some
extent 2 and 4, the performance of the adapted sys-
tem does not degrade similarly and may outperform
the speaker-dependent system. Further investigations
are necessary to find appropriate adaptation schemes
for the purpose of EMG speech recognition.
4.4 Impact of Training Data Amount
In this section we investigate the impact of the amount
of training data on the performance of the EMG rec-
ognizer. For this purpose we compare the two set-
ups Speaker-Dependent Training and Cross-Speaker
Training + Adaptation as described above. The dif-
ference lies in the fact that we run training and test
on speaker 14, who has recorded a larger training and
test set than the other speakers. In total we have 380
sentences for training and 120 sentences for testing of
this speaker.
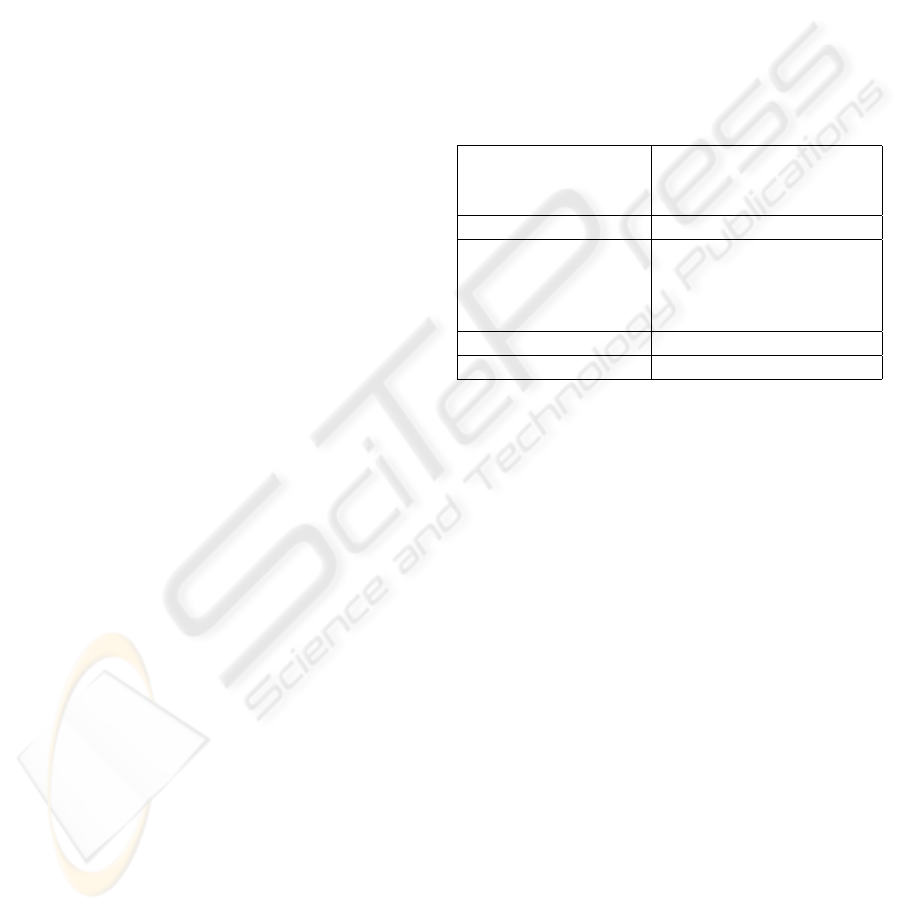
Figure 5 shows the results of this experiment. Ob-
viously, if more than 10 sentences of training mate-
rial are given, the development of speaker-dependent
models if giving a gain. This may result from the fact
that the recognizer uses context-independent phones
and that the training set comprises of phonetically bal-
anced sentences, thus allowing us to update few num-
bers of Gaussians on a very small set of training sen-
tences.
It is notable that a training data set beyond 120
words does not significantly improve the recogni-
tion accuracy of the recognizer. This applies to both
speaker-dependent and speaker-adaptive systems.
4.5 Context-Dependent Modeling
In this section we report on the effects of using
context-dependent modeling for the acoustic models
of the EMG recognizer. From the field of acous-
tic speech recognition, it is known that modeling a
phoneme depending on its right and left neighboring
phonemes drastically increases the recognition accu-
racy, provided that the training data corpus is large
enough to offer sufficient training samples for the in-
creased number of acoustic models. It is expected that
the recorded data for a given pronounced phoneme in
the EMG signal also depends strongly on the context
in which the phoneme is spoken.
With speaker-independent and speaker-adative
training in place, we now have a large enough train-
ing corpus to allow for context-dependent modeling.
To the best of our knowledge, this is the first report
ever on context-dependent modeling for an EMG rec-
ognizer.
We used a context-dependent recognizer setup
based on (generalized) triphones sharing 600 code-
books. This means that we create a set of acous-
tic models, each of which takes into consideration
TOWARDS SPEAKER-ADAPTIVE SPEECH RECOGNITION BASED ON SURFACE ELECTROMYOGRAPHY
159
3-2
6-1
1-2
10-2
5-2
7-1
5-1
6-2
11-2
11-1
1-1
4-1
7-2
3-1
12-2
13-1
13-2
9-1
12-1
10-1
2-2
2-1
4-2
9-2
8-2
8-1
Average
30.00%
40.00%
50.00%
60.00%
70.00%
80.00%
90.00%
100.00%
Speaker-dependent
training
Cross-speaker training Cross-speaker training
+ adaptation
Session
WER
Figure 4: Comparison of Word Error Rates with Different Adaptation Methods.
10 20 30 40 80 120 160 380
30.00%
40.00%
50.00%
60.00%
70.00%
80.00%
90.00%
100.00%
Speaker-dependent
training
Cross-Speaker Training
+ Adaptation
Training Set Size (Sentences)
WER
Figure 5: Comparison of Word Error Rates with Different
Number of Training Sentences.
not only the current phoneme, but also the left and
right neighboring phonemes (hence the name tri-
phones). However it would be unfeasible to train sep-
arate acoustic models for each combination of three
phonemes, therefore we use automatic context clus-
tering to merge contexts which have similar effects
on the current phoneme.
The context clustering works by creating a con-
text decision tree (see e.g. (Finke and Rogina, 1997)),
which classifies triphones by asking linguistic ques-
tions about the triphones. The set of all possible
questions is predefined, examples of these categor-
ical questions are: Is the left-context phone a back
vowel? or Is the right-context phone a fricative?. The
context tree is created from top to bottom, i.e. the
initial set of acoustic models consists of the context-
independent models, and each context question splits
one acoustic model into two new models. The split-
ting criterion is maximizing the loss of entropy caused
by the respective split. The process ends when a pre-
determined termination condition is met. This con-
dition must be chosen based on the properties of the
available data to create a good balance between the
accuracy and the trainability of the context-dependent
models.
Our termination criterion is that a fixed number
of 600 tree leaves, corresponding to 600 independent
acoustic models, is generated, since this number was
experimentally found to yield optimal results.
So the general training process is as follows:
• First, an ordinary context-independent EMG rec-
ognizer is trained on all available data (including
the training data of the speaker to be tested). We
call this setup “Speaker-Independent Training” as
opposed to the cross-speaker experiments above.
We use the performance of this preliminary rec-
ognizer as a baseline during these experiments.
• In a second step, the context decision tree is grown
as described above.
• The final context-dependent EMG recognizer is
trained using the 600 acoustic models defined in
the previous step.
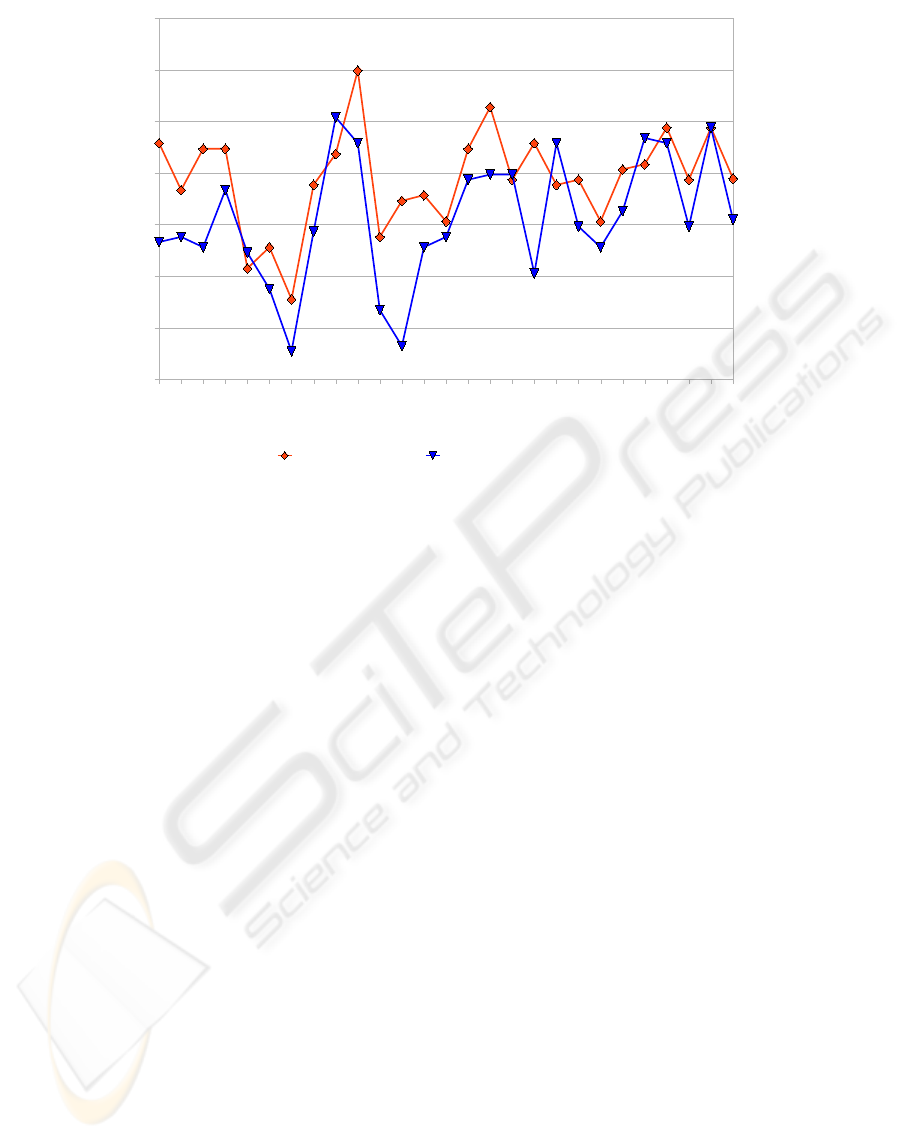
Figure 6 shows the recognition results of the
context-dependent recognizer. The overall average
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
160
1-1
1-2
2-1
2-2
3-1
3-2
4-1
4-2
5-1
5-2
6-1
6-2
7-1
7-2
8-1
8-2
9-1
9-2
10-1
10-2
11-1
11-2
12-1
12-2
13-1
13-2
Average
30.00%
40.00%
50.00%
60.00%
70.00%
80.00%
90.00%
100.00%
Context-independent
training
Context-Dependent
Training
Session
WER
Figure 6: Comparison of Word Error Rates on a Context-Dependent and a Context-Independent System.
performance of the context-independent system has
a WER of 68.92%, which by context-dependent mod-
eling drops to 60.97%. This is a relative improve-
ment of 11.5%. As can be seen, for the majority of
speakers, context-dependent modeling significantly
improves the recognition performance.
On this basis, it is worthwhile to take a closer look
at the context decision tree. Since the context ques-
tions are asked in order of entropy decrease, the fact
that a question occurs close to the root of a context de-
cision tree means that this question distinguishes two
representations (contexts) of a phoneme which create
relatively distinct EMG signals.
A first manual inspection indeed shows a cer-
tain pattern in the context questions: For vowels, in
many cases the first context questions (correspond-
ing to high entropy decreases) ask whether the right
or left neighboring phoneme is a (bi-)labial or labi-
alized consonant. This suggests that the lip position
not only is well picked up by the EMG electrodes,
but also strongly influences the articulation of adja-
cent phonemes. For consonants, in many cases an
early context split asks whether the current phoneme
is preceded or followed by silence. Therefore we may
assume that the articulation of such consonants differs
depending on its position in the middle or at the end
of a word.
Finally, we compared this result with the proper-
ties of a context decision tree of an audible speech
recognizer, namely the BN speech recognizer de-
scribed in section 3.1, and found that in the case
of acoustic speech recognition, these findings do not
hold (see also (Finke and Rogina, 1997)). Therefore
we can conclude that our context decision tree actu-
ally captures EMG-specific articulation properties.
5 CONCLUSIONS
We have compared EMG speech recognition on
a speaker-dependent, a speaker-independent and a
speaker-adapted system on a newly developed cor-
pus of training and test data. We compared the per-
formance of the new corpus to the data used by (Jou
et al., 2006b) and could support the findings therein:
both in performance and in EMG delay properties, our
new data set shows similar properties as the data set
of (Jou et al., 2006b).
We reported first results on the performance of
EMG speech recognition across multiple speakers
and sessions. While we found that for the majority of
cases a speaker- and session-dependent EMG system
still performed best, we showed that the MLLR adap-
tation method is feasible for EMG speech recognition
and generally yields good results, which makes the
building of speaker-adaptive EMG recognition sys-
tems possible.
Finally, we successfully applied context-
dependent phoneme modeling on EMG speech
recognition and showed that it significantly increases
TOWARDS SPEAKER-ADAPTIVE SPEECH RECOGNITION BASED ON SURFACE ELECTROMYOGRAPHY
161

the recognition performance of an EMG recognizer
trained on multi-speaker data.
ACKNOWLEDGEMENTS
We would like to thank Maria Dietrich for the col-
lection of the data and her advisor Katherine Ver-
dolini Abbott for her support. This study was sup-
ported in part through funding received from the
SHRS Research Development Fund, School of Health
and Rehabilitation Sciences, University of Pittsburgh
to Maria Dietrich and Katherine Verdolini Abbott.
Many thanks go to Szu-Chen (Stan) Jou for his
ever-patient help with the Janus Recognition Toolkit
and the EMG decoding scripts!
REFERENCES
Chan, A., Englehart, K., Hudgins, B., and Lovely, D.
(2002). Hidden Markov Model Classification of My-
olectric Signals in Speech. Engineering in Medicine
and Biology Magazine, IEEE, 21(9):143–146.
Dietrich, M. (2008). The Effects of Stress Reactivity on Ex-
tralaryngeal Muscle Tension in Vocally Normal Par-
ticipants as a Function of Personality. PhD thesis,
University of Pittsburgh.
Dietrich, M. and Abbott, K. V. (2007). Psychobiological
framework of Stress and Voice: A Psychobiological
Framework for Studying Psychological Stress and its
Relation to Voice Disorders. In: K. Izdebski (Ed.):
Emotions in the Human Voice (Vol.II, Clinical Evi-
dence, pp. 159-178). San Diego, Plural Publishing.
Finke, M. and Rogina, I. (1997). Wide Context Acoustic
Modeling in Read vs. Spontaneous Speech. In Proc.
ICASSP, volume 3, pages 1743–1746.
Hueber, T., Chollet, G., Denby, B., Dreyfus, G., and Stone,
M. (2007). Continuous-Speech Phone Recognition
from Ultrasound and Optical Images of the Tongue
and Lips. In Proc. Interspeech, pages 658–661.
Jorgensen, C. and Binsted, K. (2005). Web Browser Control
Using EMG Based Sub Vocal Speech Recognition. In
Proceedings of the 38th Hawaii International Confer-
ence on System Sciences.
Jou, S.-C., Maier-Hein, L., Schultz, T., and Waibel, A.
(2006a). Articulatory Feature Classification Using
Surface Electromyography. In Proceedings of the
IEEE International Conference on Acoustics, Speech,
and Signal Processing (ICASSP-2006), Toulouse,
France, May 15-19, 2006.
Jou, S.-C., Schultz, T., and Waibel, A. (2005). Whispery
Speech Recognition Using Adapted Articulatory Fea-
tures. In Proc. ICASSP.
Jou, S.-C., Schultz, T., Walliczek, M., Kraft, F., and Waibel,
A. (2006b). Towards Continuous Speech Recogni-
tion using Surface Electromyography. In Proc. Inter-
speech, Pittsburgh, PA.
Kingsbury, N. G. (2000). A Dual-Tree Complex Wavelet
Transform with Improved Orthogonality and Symme-
try Properties. In Proc. IEEE Conf. on Image Process-
ing, Vancouver.
Leggetter, C. J. and Woodland, P. C. (1995). Maximum
likelihood linear regression for speaker adaptation of
continuous density hidden Markov models. Computer
Speech and Language, 9:171–185.
Maier-Hein, L., Metze, F., Schultz, T., and Waibel, A.
(2005). Session Independent Non-Audible Speech
Recognition Using Surface Electromyography. In
Proc. ASRU.
Shensa, M. J. (1992). The Discrete Wavelet Transform:
Wedding the
`
A Trous and Mallat Algorithms. IEEE
Transactions on Signal Processing, 40:2464–2482.
Walliczek, M., Kraft, F., Jou, S.-C., Schultz, T., and Waibel,
A. (2006). Sub-Word Unit Based Non-Audible
Speech Recognition Using Surface Electromyogra-
phy. In Proc. Interspeech, Pittsburgh, PA.
Wand, M., Jou, S.-C. S., and Schultz, T. (2007). Wavelet-
based Front-End for Electromyographic Speech
Recognition. In Proc. Interspeech.
Yu, H. and Waibel, A. (2000). Streamlining the Front End
of a Speech Recognizer. In Proc. ICSLP.
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
162
