
3D RECONSTRUCTION FOR TEXTURELESS SURFACES
Surface Reconstruction for Biological Research of Bryophyte Canopies
Michal Krumnikl, Eduard Sojka, Jan Gaura
Department of Computer Science, V
ˇ
SB - Technical University of Ostrava, 17. listopadu 15/2172, Ostrava, Czech Republic
Old
ˇ
rich Motyka
Institute of Environmental Engineering, V
ˇ
SB - Technical University of Ostrava
17. listopadu 15/2172, Ostrava, Czech Republic
Keywords:
3D reconstruction, Camera calibration, Depth from focus, Depth from illumination, Bryophyte canopy, Sur-
face roughness.
Abstract:
This paper covers the topic of three dimensional reconstruction of small textureless formations usually found
in biological samples. Generally used reconstructing algorithms do not provide sufficient accuracy for sur-
face analysis. In order to achieve better results, combined strategy was developed, linking stereo matching
algorithms with monocular depth cues such as depth from focus and depth from illumination.
Proposed approach is practically tested on bryophyte canopy structure. Recent studies concerning bryophyte
structure applied various modern, computer analysis methods for determining moss layer characteristics draw-
ing on the outcomes of a previous research on surface of soil. In contrast to active methods, this method is a
non-contact passive, therefore, it does not emit any kind of radiation which can lead to interference with moss
photosynthetic pigments, nor does it affect the structure of its layer. This makes it much more suitable for
usage in natural environment.
1 INTRODUCTION
Computer vision is still facing the problem of
three-dimensional scene reconstruction from two-
dimensional images. Not a few algorithms have been
developed and published to solve this problem. These
algorithms can be divided into two categories; passive
and active (Jarvis, 1983). Passive approaches such as
shape from shading or shape from texture recover the
depth information from a single image (Horn, 1986;
Horn and Brooks, 1986; Coleman and Jain, 1981;
Prados and Faugeras, 2005). Stereo and motion anal-
ysis use multiple images for finding the object depth
dependencies (Ogale and Aloimonos, 2005; Kanade
and Okutomi, 1994; Sun et al., 2005; Kolmogorov
and Zabih, 2001). These algorithms are still devel-
oped to achieve higher accuracy and faster computa-
tion, but it is obvious that none will ever provide uni-
versal approach applicable for all possible scenes.
In this paper, we present combined strategy for re-
constructing three dimensional surface of textureless
formations. Such formations can be found in biologi-
cal and geological samples. Standing approaches suf-
fer mainly from the following shortcomings: high er-
ror rate of stereo correspondence in images with large
disparities, feature tracking is not always feasible,
samples might be damaged by active illumination sys-
tem, moreover biological samples can even absorb in-
cident light. Observing these drawbacks we have de-
veloped system linking several techniques, specially
suited for our problem.
Presented reconstruction method was tested on
bryophyte canopies surfaces. Obtaining three dimen-
sional surface is the first stage of acquiring surface
roughness, which is used as biological monitor (Rice
et al., 2005; Motyka et al., 2008).
2 METHODS
In this section we will briefly describe the methods
involved in our system, emphasizing improvements to
increase the accuracy and the density of reconstructed
points. As the base point, stereo reconstruction was
chosen. Selected points from the reconstruction were
used as the reference points for depth from illumina-
95
Krumnikl M., Sojka E., Gaura J. and Motyka O. (2009).
3D RECONSTRUCTION FOR TEXTURELESS SURFACES - Surface Reconstruction for Biological Research of Bryophyte Canopies.
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, pages 95-100
DOI: 10.5220/0001539400950100
Copyright
c
SciTePress

tion estimation. Missing points in the stereo recon-
struction were calculated from the illumination and
depth from focus estimation. The last technique pro-
vides only rough estimation and is largely used for the
verification purposes.
2.1 Stereo 3D Reconstruction
The following main steps leading to a reconstruction
of a sample surface are performed by particular parts
of the system: (i) calibration of the optical system
(i.e., the pair of cameras), (ii) 3D reconstruction of
the sample surface itself. In the sequel, the mentioned
steps will be described in more details.
In the calibration step, the parameters of the opti-
cal system are determined, which includes determin-
ing the intrinsic parameters of both the cameras (focal
length, position of the principal point, coefficients of
nonlinear distortion of the lenses) and the extrinsic pa-
rameters of the camera pair (the vector of translations
and the vector of rotation angles between the cam-
eras). For calibrating, the chessboard calibration pat-
tern is used. The calibration is carried out in the fol-
lowing four steps: (1) creating and managing the set
of calibration images (pairs of the images of calibra-
tion patterns captured by the cameras), (2) processing
the images of calibration patterns (finding the chess-
board calibration pattern and the particular calibration
points in it), (3) preliminary estimation of the intrin-
sic and the extrinsic parameters of the cameras, (4) fi-
nal iterative solution of all the calibration parameters.
Typically, the calibration is done only from time to
time and not necessarily at the place of measurement.
For solving the tasks that are included in Step 2,
we have developed our own methods that work au-
tomatically. For the initial estimation of the parame-
ters (Step 3), the method proposed by Zhang (Zhang,
1999; Zhang, 2000) was used (similar methods may
now be regarded as classical; they are also mentioned,
e.g., by Heikilla and Silven (Heikilla and Silven,
1997), Heikilla (Heikilla, 2000), Bouguet (Bouguet,
2005) and others). The final solution of calibration
was done by the minimization approach. The sum of
the squares of the distances between the theoretical
and the real projections of the calibration points was
minimized by the Levenberg-Marquardt method.
If the optical system has been calibrated, the sur-
face of the observed sample may be reconstructed,
which is done in the following four steps: (i) captur-
ing a pair of images of the sample, (ii) correction of
geometrical distortion in the images, (iii) rectification
of the images, (iv) stereomatching, (v) reconstruction
of the sample surface.
Distortion correction removes the geometrical dis-
tortion of the camera lenses. The polynomial distor-
tion model with the polynomial of the sixth degree is
used. The distortion coefficients are determined dur-
ing the calibration.
Rectification of the images is a computational step
in which both the images that are used for reconstruc-
tion are transformed to the images that would be ob-
tained in the case that the optical axes of both cameras
were parallel. The rectification step makes it easier to
solve the subsequent step of finding the stereo corre-
spondence, which is generally difficult. The rectifica-
tion step is needed since it is impossible to guarantee
that optical axes are parallel in reality. We have devel-
oped a rectification algorithm that takes the original
projection matrices of the cameras determined during
calibration and computes two new projection matri-
ces of fictitious cameras whose optical axes are par-
allel and the projection planes are coplanar. After the
rectification, the corresponding points in both images
have the same y-coordinate.
The dense stereo matching problem consists of
finding a unique mapping between the points be-
longing to two images of the same scene. We say
that two points from different images correspond one
to another if they depict a unique point of a three-
dimensional scene. As a result of finding the corre-
spondence, so called disparity map is obtained. For
each image point in one image, the disparity map con-
tains the difference of the x-coordinates of that point
and the corresponding point in the second image. The
situation for finding the correspondence automatically
is quite difficult in the given context since the struc-
ture of the samples is quite irregular and, in a sense,
similar to noise. We have tested several known al-
gorithms (Kolmogorov and Zabih, 2001; Kanade and
Okutomi, 1994; Ogale and Aloimonos, 2005) for this
purpose. The results of none of them, however, are
fully satisfactory for the purpose of reconstruction.
Finally, we have decided to use the algorithm that was
proposed by Ogale and Aloimonos (Ogale and Aloi-
monos, 2005) that gave the best results in our tests.
2.2 Auxiliary Depth Estimators
The depth map obtained from the 3D reconstruction
is further processed in order to increase the resolu-
tion and fill the gaps of missing data. To achieve this
we have implemented several procedures based on
the theory of human monocular and binocular depth
perception (Howard and Rogers, 1996). Exploited
monoculars cues were depth from the focus and light-
ing cues.
Depth estimation based on lighting cues was pre-
sented in several papers (Liao et al., 2007; Magda
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
96

et al., 2001; Ortiz and Oliver, 2000). Methods pro-
posed in these papers were stand-alone algorithms re-
quiring either calibrated camera or controlled light
source. More simplified setup was proposed in (Liao
et al., 2007) using projector mounted on a linear stage
as a light source. These approaches calculate depth
from multiple images taken from different angles or
with varying lighting.
For our application we have developed slightly
modified method based on the previous research
which is capable of acquiring depths from just one
image. Assuming that we have already preliminary
depth map (e.g. disparity map from the stereo match-
ing algorithm) we can find the correspondence of
depth and the light intensity.
According to the inverse square law, the measured
luminous flux density from a point light source is in-
versely proportional to the square of the distance from
the source. The intensity of light I at distance r is
I =
P
4πr
2
, I ∝
1
r
2
, here P is the total radiated power
from the light source. Analyzed surfaces were ap-
proximated by Lambertian reflectors.
In contrast to (Liao et al., 2007) we are assuming
mostly homogeneous textureless uniform colored sur-
faces. Observing these assumptions we can omit the
step involving the computation of the ratio of inten-
sity from two images and alter the equation in order
to exploit already known depth estimation from pre-
vious 3D reconstruction based on the stereo matching
algorithm. Points that show high level of accuracy in
the previous step are used as the reference points for
illumination estimation. Look-up table, based on the
inverse square law, mapping the computed depth to
intensity is calculated.
The last method involved in the reconstruc-
tion step is the integration of focus measurement.
The depth from focus approaches have been used
many times for real time depth sensors in robotics
(Wedekind, 2002; Chaudhuri et al., 1999; Nayar et al.,
1996; Xiong and Shafer, 1993). Key to determine
the depth from focus is the relationship between fo-
cused and defocused images. Blurring is represented
in the frequency domain as the low-pass filter. The fo-
cus measure is estimated by frequency analysis. Dis-
crete Laplacian is used as the focus operator. For each
image segment, depth is estimated as the maximal
output of the focus operator. Since the images were
taken from short range, the lens focus depth was large
enough to capture the scene with high details. Thus
only a few focus steps were used in the experiments.
The final depth is calculated as the weighted av-
erage from values given by stereo reconstruction pro-
cess, light intensity and depth from focus estimation.
Appropriate weights were set according to the exper-
imental results gained with each method. The graphi-
cal illustration (Figure 1) shows the depth of acquired
data. Still the biggest disadvantage of camera based
scanning technique is the occurrence of occlusions,
decreasing the reconstructed point density.
STEREOVISION
PHOTOMETRY
FOCUS
Figure 1: Comparison of Used Methods for Depth Estima-
tion.
3 BRYOPHYTE STRUCTURE
Bryophytes are plants of a rather simple structure,
they lack of roots and conductive tissues of any kind
or even structural molecules that would allow es-
tablishment of their elements such as lignin (Crum,
2001). The water which is generally needed for
metabolic processes including photosynthesis is in the
case of bryophytes also necessary for reproductive
purposes, for their spermatozoids, particles of sexual
reproduction, are unable to survive under dry condi-
tions (Brodie, 1951). This makes them, unlike tra-
cheophytes (vascular plants), poikilohydric – strongly
dependent on the water conditions of their vicinity
(Proctor and Tuba, 2002) – which led to several eco-
logical adaptations of them. One of the most impor-
tant adaptations is forming of a canopy – more or less
compact layer of moss plants, frequently of a same
clonal origin, which enables the plants to share and
store water on higher, community level.
Recent infrequent studies concerning bryophyte
canopy structure applied various modern, computer
analysis methods to determine moss layer characteris-
tics drawing on the outcomes of a research on surface
of soil (Darboux and Huang, 2003). Surface rough-
ness index (L
r
) has been hereby used as a monitor of
quality and condition of moss layer, other indices, i.e.
the scale of roughness elements (S
r
) and the fractal di-
mension (D) of the canopy profile have been used and
3D RECONSTRUCTION FOR TEXTURELESS SURFACES - Surface Reconstruction for Biological Research of
Bryophyte Canopies
97
found to be important as well (Rice et al., 2001). As
stated in Rice (Rice et al., 2005), contact probe, LED
scanner and 3D laser scanner were used and com-
pared in light of efficiency and serviceability in 27
canopies of different growth forms. However, none of
the methods already assessed have not been found to
be convenient for field research, especially due to the
immobility of used equipment and therefore needed
dislocation of the surveyed moss material into the lab-
oratory. This has great disadvantage in destroying the
original canopy not only due to the transfer and ex-
cision from its environment, but also due to different
much dryer conditions affecting moss surface in lab-
oratory.
4 BRYOPHYTE CANOPY
ANALYSIS
The former methods (Rice et al., 2001; Rice et al.,
2005) are suitable and efficient for measuring struc-
tural parameters in laboratory, but generally are im-
practicable in the field. Despite the LED scanner is
presented as a portable device, it has high demands
for proper settings and conditions that has to be main-
tained.
The method described in this paper presents a new
approach using the pair of cameras as the scanning de-
vice. Computer analysis involving 3D reconstruction
and soil roughness compensation is used to calculate
the canopy surface roughness. The main goal was to
create a device that can be used in the field, needs a
minimum time for settings and is able to operate in
the variety of environments.
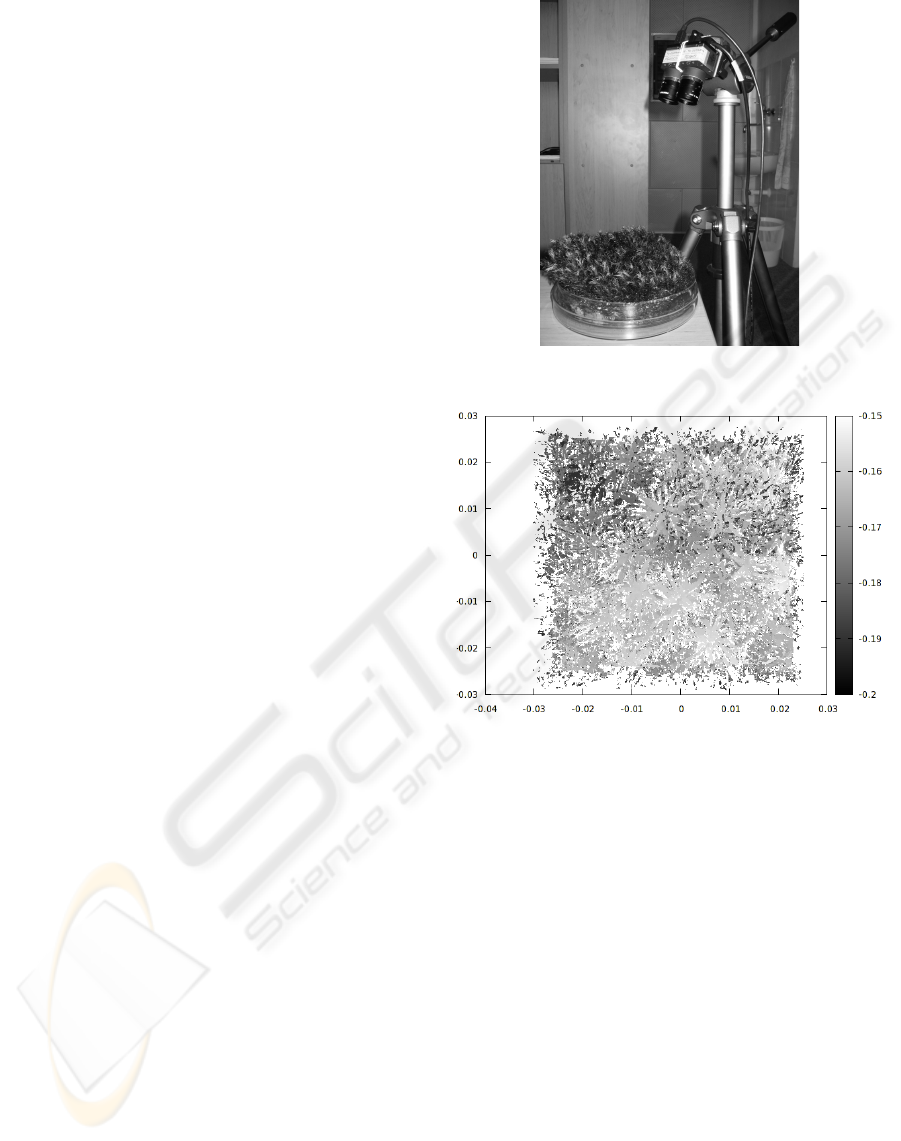
Our device is composed of hardware parts – op-
tical system consisting of two cameras and soft-
ware, analyzing acquired images. The images are ac-
quired from two IDS Imaging cameras (2240-M-GL,
monochromatic, 1280x1024 pixels, 1/2” CCD with
lenses PENTAX, f=12 mm, F1.4) firmly mounted in
a distance of 32.5 mm between them (Figure 2). Im-
ages has been taken in normal light, no auxiliary lamp
was used.
4.1 Surface Roughness
Surface roughness is a measurement of the small-
scale variations in the height of a physical surface of
bryophyte canopies.
For the statistical evaluation of every selected
bryophyte, we fitted all measured z-component val-
ues that we obtained from the 3D reconstruction (2.1)
with a polynomial surface. This surface then repre-
sents the mean value of measured z-component. For
Figure 2: The pair of cameras mounted on the tripod.
Figure 3: Z-components from the reconstruction (Poly-
trichastrum formosum).
this step, we have already a full set of x-, y-, and z-
components (in meters) from the previous reconstruc-
tion process (Figure 3). Following figure shows an-
other reconstructed sample of the same species in the
original coordinates of the image (Figure 4).
In order to calculate the surface specific parame-
ters, we have to minimize the impact of subsoil seg-
mentation. We have performed a regression using the
polynomial expression above to interpolate the sub-
soil surface. Thus we have obtained the surface that
represents the average canopy level. The distances
from the reconstructed z-coordinates and the fitting
surface were evaluated statistically.
Canopy structure can be characterized by the sur-
face characteristics. The most common measure of
statistical dispersion is the standard deviation, mea-
suring how widely z-values are spread in the sample.
Bryophyte canopy structure is also described by
L
r
parameter defined by Rice as the square root of
twice the maximum semivariance (Rice et al., 2001).
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
98
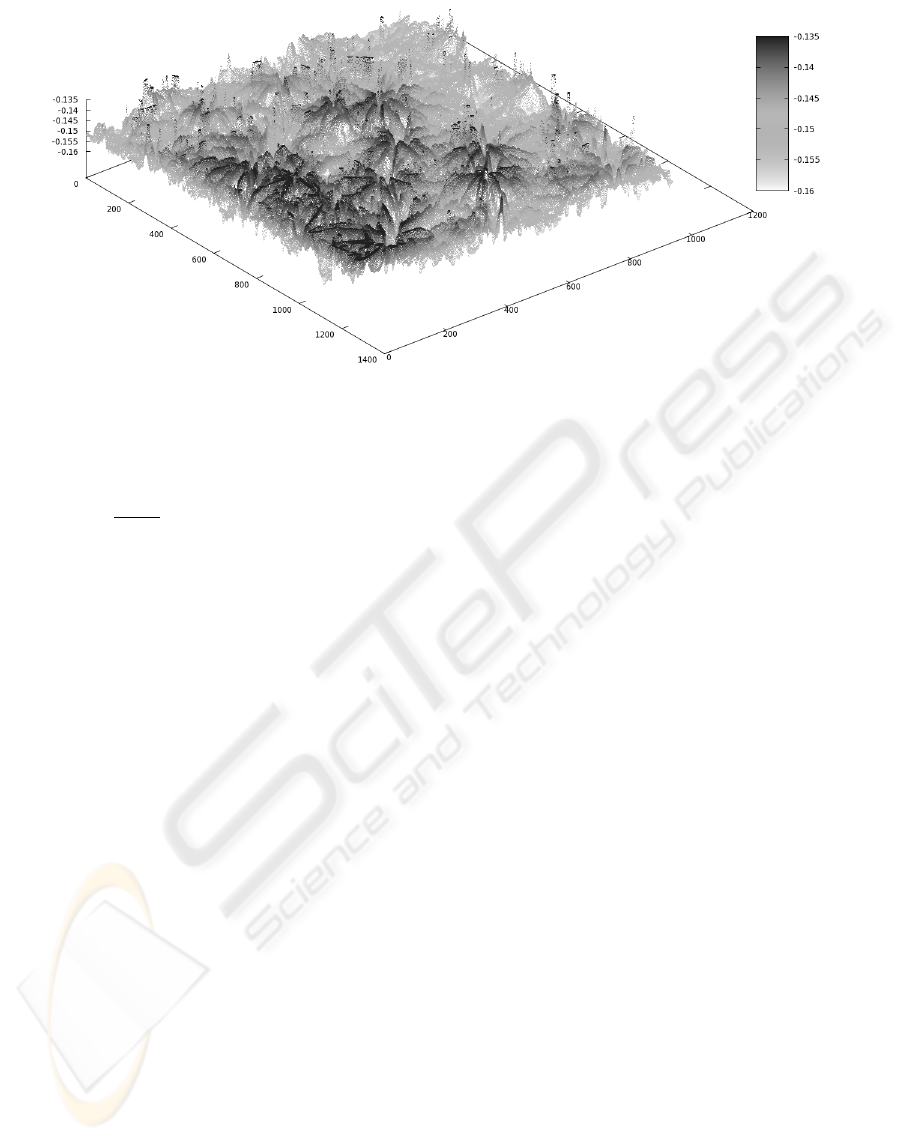
Figure 4: Results of 3D reconstruction of canopy sample (Polytrichastrum formosum).
Semivariance is described by
b
γ(h) =
1
2n(h)
n(h)
∑
i=1
(z(x
i
+ h) − z(x
i
))
2
, (1)
where z is a value at a particular location, h is the dis-
tance between ordered data, and n(h) is the number of
paired data at a distance of h (Bachmaier and Backes,
2008).
The real surface is so complicated that only one
parameter cannot provide a full description. For more
accurate characteristics other parameters might be
used (e.g. maximum height of the profile, average
distance between the highest peak and lowest valley
in each sampling length).
5 RESULTS
When applied in a study of six bryophyte species
(Motyka et al., 2008) surface structure (Bazzania
trilobata, Dicranum scoparium, Plagiomnium undu-
latum, Polytrichastrum formosum, Polytrichum com-
mune and Sphagnum girgensohnii), both in laboratory
and in situ, mentioned approach was found to be able
to obtain data suitable for surface roughness index
calculation. Also, indices calculated in eight speci-
men per each species (four in laboratory and four in
field measurements, total 48 specimens) were found
to significantly distinguish the specimens in depen-
dence on species kind; one-way analysis of variance
showed high significance (p = 0, 000108) when data
were pooled discounting whether derived from labo-
ratory or from field measurements. Laboratory mea-
surements separate gave not that significant outcomes
(p = 0, 0935), for there were found distinctively dif-
ferent indices of Dicranum scoparium specimens in
laboratory and in field caused probably by disturbance
of their canopies when transferring and storage in lab-
oratory. This is supported by the fact that indepen-
dent two-sample t-test showed significant difference
between laboratory and field measurements outcomes
only in case of this one species (p = 0, 006976). This
approach was then found to be suitable to be utilized
even under in situ conditions which is according to
the outcomes of the mentioned study considered to
be much more convenient way to study bryophyte
canopy structure.
6 CONCLUSIONS
By comparing the results of pure stereo matching al-
gorithms (Kolmogorov and Zabih, 2001; Kanade and
Okutomi, 1994; Ogale and Aloimonos, 2005) and our
combined approach we have found out our method to
be more suitable for homochromatic surfaces. Bio-
logical samples we have been working with were typ-
ical by the presence of rather long narrow features
(leaves or branches). Heavy density of such forma-
tions in the images is more than unusual input for the
stereo matching algorithms supposing rather smooth
and continuous surfaces. Segmentation used by graph
cut based stereo matching algorithms usually lead in
creating a great many regions without match in the
second image.
Without using additional cues, described in this
paper, results of reconstructed image was poor, usu-
ally similar to noise without and further value for
bryophyte analysis. Meanwhile our reconstruction
3D RECONSTRUCTION FOR TEXTURELESS SURFACES - Surface Reconstruction for Biological Research of
Bryophyte Canopies
99

process produce outputs that are sufficient for further
biological investigation. Both number of analyzed
specimens and number of obtained z-values for statis-
tical analysis are unprecedented and this approach is
so far the only one successfully used in field. Further
research will be carried out in order to describe the
surface more appropriately for biological purposes.
REFERENCES
Bachmaier, M. and Backes, M. (2008). Variogram or semi-
variogram - explaining the variances in a variogram.
Precision Agriculture.
Bouguet, J.-Y. (2005). Camera calibration toolbox
for matlab. http://www.vision.caltech.edu/bouguetj/-
calib doc/index.html.
Brodie, H. J. (1951). The splash-cup dispersal mechanism
in plants. Canadian Journal of Botany, (29):224–230.
Chaudhuri, S., Rajagopalan, A., and Pentland, A. (1999).
Depth from Defocus: A Real Aperture Imaging Ap-
proach. Springer.
Coleman, Jr., E. and Jain, R. (1981). Shape from shading
for surfaces with texture and specularity. In IJCAI81,
pages 652–657.
Crum, H. (2001). Structural Diversity of Bryophytes, page
379. University of Michigan Herbarium, Ann Arbor.
Darboux, F. and Huang, C. (2003). An simultaneous-
profile laser scanner to measure soil surface microto-
pography. Soil Science Society of America Journal,
(67):92–99.
Heikilla, J. (2000). Geometric camera calibration using cir-
cular control points. IEEE Transactions on Pattern
Analysis and Machine Intelligence 22, (10):1066–
1077.
Heikilla, J. and Silven, O. (1997). A four-step camera cal-
ibration procedure with implicit image correction. In
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition (CVPR97), pages 1106–
1112.
Horn, B. (1986). Robot Vision. MIT Press.
Horn, B. and Brooks, M. (1986). The variantional approach
to shape from shading. In Computer Vision Graphics
and Image Processing, volume 22, pages 174–208.
Howard, I. P. and Rogers, B. J. (1996). Binocular Vision
and Stereopsis, pages 212–230. Oxford Scholarship
Online.
Jarvis, R. A. (1983). A perspective on range finding tech-
niques for computer vision. In IEEE Trans. Pattern
Analysis and Machine Intelligence, volume 5, pages
122–139.
Kanade, T. and Okutomi, M. (1994). A stereo matching
algorithm with an adaptive window: Theory and ex-
periment. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 16(9):920–932.
Kolmogorov, V. and Zabih, R. (2001). Computing vi-
sual correspondence with occlusions using graph cuts.
iccv, 02:508.
Liao, M., Wang, L., Yang, R., and Gong;, M. (2007). Light
fall-off stereo. Computer Vision and Pattern Recogni-
tion, pages 1–8.
Magda, S., Kriegman, D., Zickler, T., and Belhumeur, P.
(2001). Beyond lambert: reconstructing surfaces with
arbitrary brdfs. In ICCV, volume 2, pages 391–398.
Motyka, O., Krumnikl, M., Sojka, E., and Gaura, J. (2008).
New approach in bryophyte canopy analysis: 3d im-
age analysis as a suitable tool for ecological studies of
moss communities? In Environmental changes and
biological assessment IV. Scripta Fac. Rerum Natur.
Univ. Ostraviensis.
Nayar, S. K., Watanabe, M., and Noguchi, M. (1996). Real-
time focus range sensor. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 18(12):1186–
1198.
Ogale, A. and Aloimonos, Y. (2005). Shape and the stereo
correspondence problem. International Journal of
Computer Vision, 65(3):147–162.
Ortiz, A. and Oliver, G. (2000). Shape from shading for
multiple albedo images. In ICPR, volume 1, pages
786–789.
Prados, E. and Faugeras, O. (2005). Shape from shading: a
well-posed problem? In Computer Vision and Pattern
Recognition, volume 2, pages 870–877.
Proctor, M. C. F. and Tuba, Z. (2002). Poikilohydry and
homoiohydry: antithesis or spectrum of possibilites?
New Phytologist, (156):327–349.
Rice, S. K., Collins, D., and Anderson, A. M. (2001). Func-
tional significance of variation in bryophyte canopy
structure. American Journal of Botany, (88):1568–
1576.
Rice, S. K., Gutman, C., and Krouglicof, N. (2005). Laser
scanning reveals bryophyte canopy structure. New
Phytologist, 166(2):695–704.
Sun, J., Li, Y., Kang, S. B., and Shum, H.-Y. (2005). Sym-
metric stereo matching for occlusion handling. In
CVPR ’05: Proceedings of the 2005 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR’05) - Volume 2, pages 399–406,
Washington, DC, USA. IEEE Computer Society.
Wedekind, J. (2002). Fokusserien-basierte rekonstruktion
von mikroobjekten. Master’s thesis, Universitat Karl-
sruhe.
Xiong, Y. and Shafer, S. (1993). Depth from focusing
and defocusing. Technical Report CMU-RI-TR-93-
07, Robotics Institute, Carnegie Mellon University,
Pittsburgh, PA.
Zhang, Z. (1999). Flexible camera calibration by viewing
a plane from unknown orientations. In International
Conference on Computer Vision (ICCV’99), Corfu,
Greece, pages 666–673.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. IEEE Transactions on Pattern Analysis and
Machine Intelligence 22, (11):1330–1334.
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
100
