
A Goal-based Framework for Dynamic Service
Discovery and Composition
Luiz Olavo Bonino da Silva Santos, Luís Ferreira Pires and Marten van Sinderen
Centre for Telematics and Information Technology, University of Twente
P.O. Box 217, 7500 AE Enschede, The Netherlands
Abstract. Service-oriented computing allows new applications to be developed
by using and/or combining services offered by different organizations. Service
composition can be applied when a client request cannot be satisfied by any in-
dividual service. In this case, the creation of a composite service from a number
of available services could be pursued. This composite service should comply
with the client’s request in terms of functionality and expected results. This pa-
per presents a goal-based framework for dynamic service discovery and compo-
sition. Our framework consists of a set of design principles and guidelines for
service platforms to realize dynamic service discovery and composition.
1 Introduction
In recent years, goal-based analysis has been used in different areas of Computer
Science to identify stakeholder’s objectives, determine requirements for software
systems and guide system’s behavior. This generic approach ranges from techniques
to accurately identify goals as presented in [1, 2] to the use of goals for service com-
position presented in [3, 4, 15].
Several different meanings can be found for the term goal, depending on the area
of expertise being considered. Informally, one can define goal as a particular state of
the world of which a stakeholder is committed to realize. From this informal defini-
tion, and considering the service-oriented computing principles, one can infer that
goals can be used to represent service requests and therefore, they can be used to
guide service discovery and composition activities. Initiatives applying goals for these
purposes have been reported in [3, 4, 5]. These initiatives have in common the as-
sumption that goal definitions are already available and have been previously identi-
fied and modeled. However, the initiatives do not clarify how these goals are gathered
and modeled and how the goal descriptions relate to concrete services. We claim that
prescriptions of how to model goals are still missing and that they should be ad-
dressed when developing a framework for dynamic service discovery and composi-
tion framework based on goal gathering and modeling.
This paper presents a framework for dynamic service discovery and composition
based on the use of goals. The framework includes a precise definition of goal, tech-
niques for goal assessment and modeling, and the rationale for dynamic service dis-
covery and composition.
Olavo Bonino da Silva Santos L., Ferreira Pires L. and van Sinderen M. (2008).
A Goal-based Framework for Dynamic Service Discovery and Composition.
In Proceedings of the 2nd International Workshop on Architectures, Concepts and Technologies for Service Oriented Computing, pages 67-78
DOI: 10.5220/0001899400670078
Copyright
c
SciTePress

This document is further structured as follows. Section 2 presents and discusses de-
finitions of the goal concept found in the literature, and proposes a definition that is
appropriate for the service computing scenario. Section 3 presents approaches for
service discovery and composition based on goals. Section 4 discusses our proposal
for goal-based service discovery and composition, and Section 5 gives conclusions
and identifies topics for future work.
2 Definition of Goal
The concept of goal has several different definitions varying from “the result of scor-
ing” and “the physical structure that defines where the score is achieved” in some ball
games to “a statement of intent for the direction of the business” in business admini-
stration. The definitions strongly depend on to which application area this term is
applied. Narrowing down to the Computer Science domain, a variety of definitions of
the goal concept can also be found. Below we introduce and discuss definitions of the
goal concept found in the Computer Science literature, and present our definition of
goal for the purpose of service discovery and composition.
2.1 Artificial Intelligence
In the Artificial Intelligence (AI) realm, goals are considered in problem solving re-
search. The main motivation for this research is that in order to achieve their goals
agents frequently need to act in the world. Considering computational agents, ap-
proaches and techniques have to be developed to support the generation of appropri-
ate actions. The AI community has developed two complimentary approaches to gen-
erate these actions: planning and situated actions [9]. Planning is mostly used when a
number of actions must be executed in a coherent way (pattern) to achieve a goal or
when there are complex interferences of one action on others. Conversely, situated
actions are used when the best possible action can be easily computed from the cur-
rent state of the world, i.e., when no look ahead is necessary because actions do not
interfere with each other. These approaches differ since planning uses a partial de-
scription of the state of the world while situated actions use the complete state space.
Both planning and situated actions consider a (complete or partial) description of
the world, a goal description and a set of possible actions to change the world in the
intended way. Therefore, goal is defined as a “description of a world state that is
expected to be realized” [10]. More specifically, in planning a goal is defined as a
partially specified state, represented by a conjunction of positive ground literals. A
state s satisfies a goal g if s contains all the atoms in g (and possibly others as well).
For example, the state Rich ∧ Famous ∧ Miserable satisfies the goal Rich ∧ Famous.
2.2 Agent-Oriented Computing
In the agent-oriented computing community the term goal does not have a standard
definition yet. In [11], a goal is defined as a “state with highest utility and an agent
68

must choose the course of actions to reach that goal”. In [12], two types of goal mod-
els are presented, namely the task-oriented goal model and the state-oriented goal
model. The former defines goal as a “fixed list of tasks” and the goal satisfaction is
achieved when the agent finishes all these tasks. The later defines goal as a “final
state that the agent tries to achieve by moving from its initial state through a defined
and finite sequence of intermediary states”.
Another approach in the agent-oriented community that extensively uses goals is i*
[13]. This approach defines two types of goal, namely hard goal and soft goal. A hard
goal is defined as the “representation of a stakeholder’s intentional desire”. A soft
goal is similar to a hard goal, except that it lacks clear-cut criteria for the goal’s satis-
faction, i.e., one cannot precisely determine whether a soft goal has been fully satis-
fied or not. The i* approach introduces mean-end diagrams in which tasks are the
means for satisfying goals. In i*, goal satisfaction is not defined in the goal descrip-
tion, but it is indirectly described by a task related to that goal. However, it is unclear
how goals should be formally specified in i*, since goals can appear in i* diagrams or
textual descriptions. This lack of a formal definition leads to difficulties in using the
approach consistently. Recently the consortium of universities and research centers
involved in i* is working towards the definition of a common metamodel to tackle
this issue.
Although these definitions of goal differ, a common agreement in the agent com-
munity is that goals are part of an agent’s intentional properties and that the goal
owner can act accordingly to satisfy the goal or can delegate the goal satisfaction to
other agents. Agents commonly represent the stakeholders of a domain, being these
stakeholders humans, organizations or software. Agents can delegate the fulfillment
of a goal or the execution of a task. A goal delegation represents a situation where an
agent has a goal, but for some reason it is not capable of fulfilling this goal, and dele-
gates it to be fulfilled by another agent. Task delegation occurs similarly. The main
difference between goal and task delegation is that while in the goal delegation the
goal owner wants his goal fulfilled no matter how, in task delegation the task should
be carried out in the way defined by the task owner.
Goal and task delegation can be used in goal-based service composition to guide
the establishment of security and privacy constraints. For example, if a client applica-
tion (the goal or task owner) defines that its goal or task can only be delegated to
known agents, then the service platform should only select services from providers
that have business relations with the client application’s organization.
2.3 Service-Oriented Computing
The area of service-oriented computing also benefits from the use of goals, particu-
larly to formulate users’ requirements and to guide the service composition process.
In [14], both these objectives are pursued by using a goal-driven approach to elicit
functional requirements for inter-organizational processes and to identify which ser-
vices should be provided by each organization. The approach uses a labeled directed
graph with intentions as nodes and strategies as edges between intentions. Strategies
are defined as ways to achieve intentions. An edge entering a node defines that the
given strategy (the edge) can be used to achieve the corresponding intention (the
node). Multiples edges entering a node represent alternative strategies that can be
69

used to achieve an intention. An intention is defined as a goal to be achieved by per-
forming a process that consists of a sequence of intentions and strategies that should
be followed to achieve a particular intention. Considering goals and intentions as
equivalent concepts conflicts with other definitions that consider intention as part of
the stakeholder’s mental state towards a goal, in the sense that a stakeholder wants
something to be achieved and has an intention to make it happen.
One major initiative in the Semantic Web service community is the Web Service
Modeling Ontology (WSMO) [5]. WSMO is an ontology-based conceptual model for
describing Semantic web services. In WSMO, a goal is defined as an objective that a
client might have when consulting a web service, and describes aspects related to user
desires with respect to the requested functionality. A goal in WSMO is described by
non-functional properties, imported ontologies, used mediators, requested capabilities
and requested interface. Since goals and web services descriptions have similar struc-
tures, service discovery and matching are facilitated. In the goal description, the capa-
bility section is used to express what the requester would like to achieve, and the
interface describes how the requester would like to interact with a web service.
2.4 Our Definition
Considering the approaches to use goals for service composition discussed above, we
can notice that there is no common agreement on the definition of goal. This defini-
tion is given at a high level of abstraction or in an informal way, often lacking preci-
sion and a formal representation. Another issue is that none of these approaches pre-
sent a method or process to define goals and services. The approach presented in [14]
shows a visual modeling notation, but the semantics and details of this notation are
unclear.
In our approach, a precise definition of goal is needed to allow the specification of
other elements, such as the metamodel and the domain ontologies, and to avoid ambi-
guity and misinterpretation when considering other definitions found in the literature.
In this work, we define goal as a “description of a stakeholder’s intended state of
affairs”, i.e., a stakeholder has a description of the world’s setting that he wants to
achieve and he is committed to act accordingly so that this setting becomes true.
In the domain of service-oriented computing, this definition means that a stake-
holder (in this case a service client) has a description of the setting of the world he
wants to see realized. Another important part of the goal definition is intentionality,
which implies a commitment to procure the achievement of the goal. Again, in the
case of the service-oriented computing, the achievement of the goal is delegated to
services made available by third-parties, i.e., the service client will have its goal
achieved by means of a concrete service provided by a service provider.
3 Goal-based Approaches
In Service-oriented computing literature we can find some initiatives for service dis-
covery and composition based on goals. Among them, we consider the Web Service
70

Modeling Ontology (WSMO) [5], GoalMorph [6] and the approach presented in [15],
which are further discussed below.
3.1 WSMO
The Web Service Modelling Ontology (WSMO) is a conceptual model that aims at
describing the relevant aspects of Semantic web services [5]. The main objective of
WSMO is to support the (total or partial) automation of the tasks normally related to
web services integration, i.e., discovery, selection, composition, mediation, execution,
monitoring, among others. WSMO is founded on the Web Service Modeling Frame-
work (WSMF) [6] and refines and extends WSMF by means of a formal ontology and
a family of languages.
WSMO is based on ontologies, as the well-accepted technology for knowledge rep-
resentation. It also complies with Web technologies, in that it uses URI, namespaces,
XML and other W3C recommendations. It supports decoupling between service re-
questers and service providers, offers mediation support to enforce interoperability,
and explicitly separates service description from service implementation.
Following the WSMF guidelines, WSMO prescribes four main elements to de-
scribe semantic web services, namely ontologies, goals, web services and mediators.
Ontologies provide (domain-specific) terminology for the other elements; goals define
intentions of the service requester that should be solved by web services; web services
represent atomic pieces of functionality that can be used to build more complex func-
tionality; and mediators resolve interoperability problems between other components.
The WSMO conceptual model is supported by a family of languages called the
Web Service Modelling Language (WSML) [7]. This family of languages consists of
WSML-Core, WSML-DL, WSML-Flight, WSML-Rule and WSML-Full, which offer
different levels of expressiveness, varying from minimal level supported by WSDL-
Core (intersection of Description Logics and Logic Programs, [8]) to the maximum
level expected to be supported by the (yet to be released) WSDL-Full (First-Order
Logic combined with Logic Programs).
WSMO distinguishes the concepts of web service and service. A web service is a
computational entity that is able to achieve the goal of a requester, while a service is
the actual value provided by the business service provider [5]. In WSMO, a web ser-
vice description defines the capabilities and the interface of a web service.
In WSMO, a goal defines what the requester expects to achieve by invoking a web
service. Like the web service description, a goal description contains information
about the capabilities and the interface, but in this case the capabilities are used to
describe what the requester would like to achieve, and the interface is used to describe
how the requester would like to interact with a web service. Goals and web services
descriptions have similar structures, facilitating in this way service discovery and
matching. In WSMO, goal descriptions can be viewed as the counterparts of web
service descriptions, in the sense that a goal description states what the service re-
quester wants to get achieved, and a web service description specifies what a web
service can achieve.
71

3.2 GoalMorph
GoalMorph [4] is a context-aware goal transformation framework. The framework
uses planning techniques and combines goals and contextual information to derive
service compositions. Service composition is achieved in GoalMorph by using goals
to represent information about the planning problem (or composition request) and to
limit the inference space in the planning process. The reasoning on which goals states
should be satisfied provides criteria for creating a successful plan.
The main contributions of GoalMorph are (i) a model that represents context-aware
goals; (ii) analysis and taxonomy of goal types and corresponding transformations;
(iii) a model that allows reasoning about partial satisfaction of goals; and, (iv) a utility
model to reason about goal transformations and corresponding partial success in
achieving one goal against partial success in achieving another goal.
GoalMorph classifies goal conditions into core goals, which arise from a user’s re-
quest, and context goals, which are side-effects of the current user’s context. More-
over, a taxonomy of goals is presented and consists of:
− Core Goal: a goal condition that purely describes the user’s task intention.
− Base Core Goal: the absolute minimal core goal condition that needs to be satisfied
to achieve a viable solution. Other core goals that are not base core goals can be
suppressed from a plan to achieve a partial goal satisfaction.
− Dependent Context Goal: a context goal condition which works as the attribute of a
core goal condition. If the core goal is removed from the goal set, the related de-
pendent context goals are also removed.
− Independent Context Goal: a context goal condition that does not directly affect the
user’s request and, therefore, is not removed in case a core goal is removed.
The starting point of GoalMorph is the user’s request for a composite service. A user
selects a goal from the GoalRepository and this goal forms the basis for a composite
service. The GoalRepository stores the available core goal templates that have been
defined by domain engineers using the planning language. GoalMorph uses the Plan-
ning Domain Description Language (PDDL) [16] as a planning language to represent
goals. ContextService is a general middleware infrastructure for context brokering
from a number of different context sources to context consumers. The context source
used in GoalMorph to retrieve contextual information is based on the solution pro-
posed in [17]. The ContextProxy component generates context goal conditions that
constrain the composition request based on contextual information of the user pro-
vided by the ContextService.
Based on the core goal conditions from GoalRepository and the context goal condi-
tions from ContextProxy the final composition request is assembled. Then, the Plan-
ner Composition Engine receives the problem definition (the final composition re-
quest) and the domain definition from the ServiceRegistry, and uses knowledge about
available actions and their consequences to identify a solution, i.e., to create a plan.
The creation of the plan fails if the goal cannot be satisfied or if the domain knowl-
edge is incomplete.
If the Planner Composition Engine fails to create a plan for the problem definition,
control is transferred to the Goal Transformation Engine, which transforms the goal
into a problem solvable by the Planner Composition Engine. The transformation is
performed on the core goal(s) and, by interacting with the GoalRepository, the Goal
72

Transformation Engine attempts to find forms of the original goal that can be satis-
fied. An ontology consisting of a number of hierarchies for the goals stored in the
GoalRepository is used to support goal transformation.
When a transformation ends successfully, the transformed goal is passed to the
ContextMesh for context layering, i.e., for refining the context goal conditions by
context unfolding or relaxing the context goal conditions by context folding. Users
provide context importance measures through a GUI, and these measures are used as
guidelines for the context layering operations. The final step is to feed the trans-
formed goal to the Planner Composition Engine, and the resulting composition is
evaluated by the user to refine the goal transformation utilities.
3.3 A Goal and Task-based Approach for Service Composition
Another approach for goal-based service composition is presented in [15]. This ap-
proach starts by building a task-oriented semantic representation model of web ser-
vices. In this model, application scenarios and task goals are defined at a higher ab-
straction level. Dynamic service discovery and matching, and goal-based composition
are performed to achieve the user goals. A Task Definition Language (TDL) has been
specified. In TDL tasks can be decomposed into sub-tasks and tasks are defined to
achieve goals. An ontology is used to provide an uniform vocabulary for the descrip-
tion of concepts and tasks. A goal consists of activities. Each activity can be defined
more specifically. A basic activity can be matched directly with a concrete service
and does not need to be further specified.
The approach divides the service composition life-cycle into three phases: defini-
tion, construction and execution. The definition phase allows defining goals and ab-
stract tasks to achieve the goals. The difference between the abstract definition and
concrete service composition is that service providers and control information are not
specified in the abstract definition. In the construction phase, the task is decomposed,
concrete services are matched and bound, and an executable service process is gener-
ated. In the execution phase, the concrete web services are invoked and the process is
executed to achieve the user’s goal. In [15] it is unclear how a goal should be defined,
and the terms goal and task are used interchangeably.
4 The Proposed Framework
Our approach to dynamic service discovery and composition is based on goal model-
ing, and assumes that the involved stakeholders (client applications, service providers,
third-party entities) are placed in a common and known domain. This requirement is
necessary because the approach relies on the availability of domain-specific ontolo-
gies. For each domain, valid goals for the stakeholders of that domain are identified
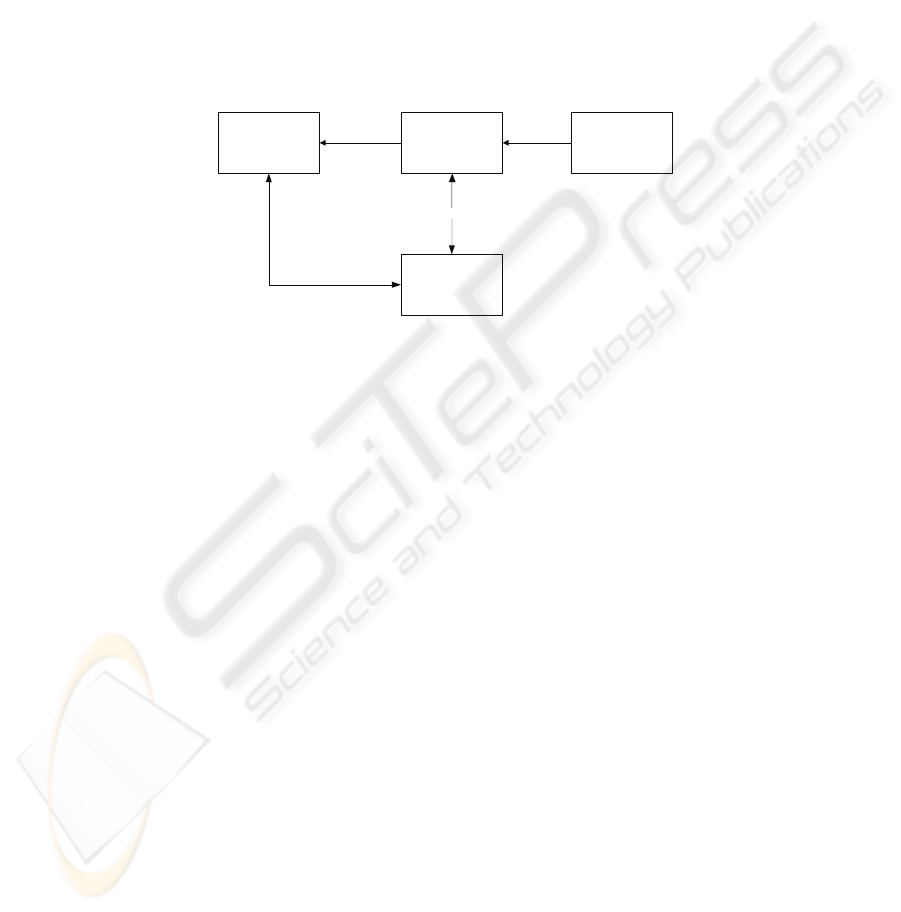
together with the tasks required for their fulfillment. Fig. 1 depicts the following main
elements that comprise our framework:
− Service Platform. A service platform supports the interaction between service pro-
viders and service clients. From the service provider’s perspective, the platform
supports the publication of service descriptions. From the service client’s perspec-
73
tive, the platform provides facilities for service discovery, composition, invocation
and monitoring, among others. Different platform implementations can offer dif-
ferent sets of facilities. In this work we assume that the platform offers at least ser-
vice discovery and composition.
− Goal-based Service Ontology. This ontology defines domain-independent concepts
such as service, stakeholder, organization, goal and task, and their relations. These
definitions are further used and specialized in the domain and task ontologies.
− Domain Ontologies. These ontologies define domain-specific concepts and the
relations among these concepts. Domain ontologies should be available for the ser-
vice platform as well as for the service providers and clients.
− Task Ontologies. Associated with domain ontologies, task ontologies provide do-
main-specific definitions of the tasks valid in a domain.
Service
Platform
Service
Domain and
Task
Ontologies
<<annotates>>
Goal-based
Service
Ontology
<<interacts with>>
<<defines>>
<<is used by>>
Fig. 1. Main components of our approach and their relationships.
4.1 Service Discovery
Our approach defines a set of steps that have to be followed in order to provide sup-
port for service discovery. Assuming the existence of the goal-based service ontology
and the service platform, the necessary steps to be taken and the stakeholder responsi-
ble for each step are the following:
1. Domain Specification: A domain expert defines domain and task ontologies with
the correspondent concepts, relations and the valid goals and tasks of the domain.
We illustrate this with the meeting organizing domain. In this domain, concepts
like attendee, organizer and meeting should be defined. The relations among these
concepts should be defined as well, such as the attendance relation between an at-
tendee and a meeting or the organization relation between a meeting and its organ-
izer. An example of a valid goal in this domain is to have a meeting scheduled
given a desired list of attendees and tentative time slots. Lastly, tasks pertinent to
this domain are modeled, such as schedule a meeting, accept a meeting invitation,
reject a meeting invitation and reschedule a meeting.
2. Service Description: Service providers describe their services supplying informa-
tion about the behavior of the service, the expected inputs and outputs as well as
the pre and post conditions for the service. The service description is annotated
with the concepts defined in the domain ontology. Moreover, a mapping is estab-
lished between the offered service and a task defined in the task ontology. In this
74
way, the platform can identify which available services implement the behavior of
which tasks.
3. Goal or Task Request: The service clients can request some service to the platform
in two alternative ways: by defining a goal and requesting the platform to return a
service that fulfills this goal, or by defining a task and submitting it to the platform.
In case a goal is defined and submitted to the platform, the platform performs the
following procedure:
a. It tries to match the user goal with the goals defined in the domain ontology;
b. Once a goal is found, the platform tries to find tasks defined in the task ontology
that can fulfill this goal;
c. With the mapping between services and tasks established in step 2 above, the plat-
form can identify an available service that implements the task that fulfills the re-
quested goal.
In case a task is defined and submitted to the platform, the platform first tries to find a
matching task in the task ontology and then services that implement the behavior of
the task.
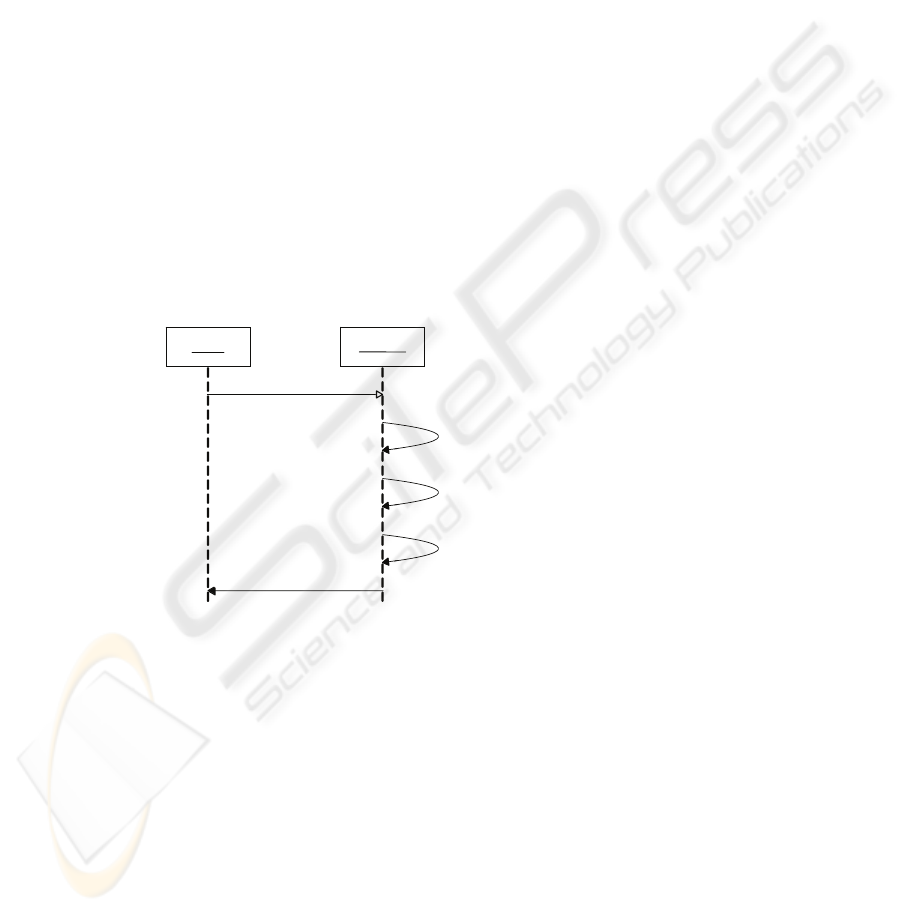
Fig. 2 presents a sequence diagram depicting the interactions between the service
client and the service platform for service discovery. The diagram only shows the
interactions up to the point where a service is found. If the platform plays a broker
role [18], the platform also performs service invocation, service composition and
adjustments of the results (if needed), and finally returns to the client the final service
execution results.
Platform
requestService(userGoal:Goal)
getDomainGoal
(
userGoal
:
Goal , domainGoal
:
Goal
)
getTas
k
(
domainGoal
:
Goal, task
:
Task
)
getService
(
domainTask
:
Task, service
:
Service
)
results
(
service
:
Service
)
Client
Fig. 2. Interaction between the client and the platform for service request.
4.2 Service Composition
In case the platform cannot find a task to fulfill a given goal or a service realizing a
domain task, further steps should be taken. Depending on where the mismatch hap-
pened we have to perform task composition (when a task is not found) or service
composition (when a service is not found). In both cases the steps are similar and rely
on the granularity of the goals and tasks specification. In case a task is not found to
fulfill a given goal, the platform checks the goal decomposition specification and tries
to find tasks that fulfill the sub-goals.
75

Fig. 3 depicts an example of goal and task decomposition. The figure uses the i*
notation [12], in which circles represent stakeholders, ovals represent goals, hexagons
represent tasks and dashed circles representing stakeholder’s boundaries. The links
between goals and sub-goals, and tasks and sub-tasks represent goal and task decom-
position, respectively. The links between goal and task represent fulfillment. Fig. 3(A)
depicts the goal modeling of a meeting organizer who has the goal of organizing a
meeting. This goal is further decomposed into invite attendees and book venue. Fig.
3(B) depicts the invite attendees sub-goal, which is fulfilled by as invite attendees
task. Although in this example the sub-goal and the task have identical names, they
represent different concepts. The sub-goal invite attendees represents a setting of the
world where the attendees of the meeting are invited, while the task invite attendees
represents a process that should be followed to invite the attendees for the meeting. In
Fig. 3, the invite attendees task is further decomposed into three sub-tasks namely get
attendees’ list, send invitation and confirm attendee attendance. With these two mod-
els, the platform is able to perform either goal (or sub-goal) matching or task (or sub-
task) matching.
Meeting
Organizer
Organize a
meeting
Invite
attendees
Book
venue
Meeting
Organizer
Invite
attendees
Invite
attendees
Get
attendees’
list
Send
invitation
Confirm
attendee
attendance
(A)
(B)
Fig. 3. Goal and task decomposition.
5 Conclusions and Future Work
In this paper we present a goal-based approach for dynamic service discovery and
composition. The approach is based on a behavior model represented by goal model-
ing. Goals can be further decomposed into sub-goals, and tasks fulfill (sub-)goals.
Client’s service requests are represented in terms of goal specifications and are sub-
mitted to the supporting service platform. Service discovery is performed by the plat-
form by matching the submitted goal against existent domain goals defined in a do-
main ontology. Another possibility is that the service client does not submit a goal but
a specific task. In this case, the platform performs service discovery by matching the
user-specified task against existing tasks defined in a task ontology.
This approach is founded in a well-defined set of domain and task ontologies. The
domain ontology describes the concepts and relations valid for a specific domain,
while the task ontology defines valid tasks for that domain. These ontologies are also
defined in terms of a higher-level goal-based ontology, which specifies concepts such
76

as stakeholders, goals, tasks and their relationships, and can be used to created do-
main and task ontologies of different domains.
This paper presents the main components of the approach, namely a goal-based
service ontology, domain and task ontologies and the service platform, and the steps
necessary to achieve dynamic service discovery and composition. The next steps of
this ongoing research are: (i) defining a goal-based service ontology; (ii) defining
domain and task ontologies for a chosen domain; and, (iii) implementing the service
discovery and composition mechanisms of the service platform in order to evalu-
ateand validate of the approach.
Acknowledgements
This work is partly funded by the Freeband Communication project A-MUSE
(http://a-muse.freeband.nl). A-MUSE is sponsored by the Dutch government under
contract BSIK 03025. The work on the definition of the goal concept is being
conducted in cooperation with Dr. Giancarlo Guizzardi, Universidade Federal do
Espírito Santo, Brazil.
References
1. Bresciani, P., Perini, A., Giorgini, P., Giunchilia, F., Mylopoulos, J., Tropos: An Agent-
Oriented Software Development Methodology. Journal of Autonomous Agents and Multi-
Agent Systems, vol. 8, pp. 203-236, The Netherlands, 2004.
2. Antón, A. I., Goal-Based Requirements Analysis, 2nd IEEE International Conference on
Requirements Engineering (ICRE 96), Colorado Springs, Colorado, USA, pp. 136-144, 15-
18 April 1996.
3. Padgham, L., Liu, W., Internet Collaboration and Service Composition as a Loose Form of
Teamwork, Journal of Network and Computer Applications, vol. 30, issue 3, pp. 1116-
1135, Academic Press Ltd., London, UK, August 2007.
4. Vukovic, M., Robinson, P., GoalMorph: Partial Goal Satisfaction for Flexible Service
Composition, IEEE International Conference on Next Generation Web Services Practices,
Seoul, Korea, August 2005.
5. Feier, C. (ed.) Web Service Modeling Ontology Primer. W3C Member Submission. 3 June
2005. Available at http://www.w3.org/Submission/2005/SUBM-WSMO-primer-20050603/.
6. Fensel, D., Bussler, C. The Web Service Modeling Framework WSMF. White Paper,
http://www1-c703.uibk.ac.at/users/c70385/wese/wsmf.paper.pdf, last accessed November
8, 2007.
7. de Bruijn, J. and Lausen, H. (eds.) Web Service Modeling Language (WSML). W3C Mem-
ber Submission. 3 June 2005. Available at http://www.w3.org/Submission/2005/SUBM-
WSML-20050603/
8. Grosof, B.N., Horrocks, I., Volz, R. and Decker S. Description logic programs: Combining
logic programs with description logic. In Proceedings of the Twelfth International World
Wide Web Conference (WWW 2003). ACM, 2003, pp 48-57.
9. Weld, D. S., An Introduction to Least Commitment Planning, The AI Magazine, nº 4, vol.
15, pp. 27-61, Winter 1994.
10. Russel, S., Norvig, P., Artificial Intelligence: A Modern Approach, Prentice Hall, 2nd
edition, December 2002.
77

11. Moghadasi, M. N., Haghighat, A. T., Ghidary, S. S., Evaluating Markov Decision Process
As A Model For Decision Making Under Uncertainty Environment, in Proceedings of the
2007 International Conference on Machine Learning and Cybernetics, vol. 5, pp. 2446-
2450, 19-22 Aug 2007, Hong Kong, China.
12. Rosenschein, J. S., Zlotkin, G., Rules of Encounter: Designing Conventions for Automated
Negotiation among Computers, MIT Press, Cambridge, Massachusetts, USA, 1994.
13. Yu, E., Towards Modelling and Reasoning Support for Early-Phase Requirements Engi-
neering, In Proceedings of the 3rd IEEE International Symposium on Requirements Engi-
neering (RE’97), pp. 226-235, Washington D.C., USA, Jan 6-8, 1997.
14. Kaabi, R. S., Souveyet, C., Rolland, C., Eliciting service composition in a goal driven
manner. In Proceedings of the 2nd International Conference on Service-Oriented Comput-
ing (ICSOC ’04). ACM Press, New York, NY, USA, pp. 308-315, 2004.
15. Zhang, K., Li, Q., Sui, Q., A Goal-driven Approach of Service Composition for Pervasive
Computing., in Proceedings of the 1st International Symposium on Pervasive Computing
and Applications, pp. 593-598, August 3-5, 2006.
16. Ghallab, M., Howe, A., Knoblock, C., McDermott, D., Ram, A., Veloso, M., Weld, D.,
Wilkins D., PDDL – The Planning Domain Definition Language, (1998).
17. Lei, H., Sow, D.M., Davis, II, J.S., Banavar, G., Ebling, M.R.: The design and applications
of a context service. SIGMOBILE Mob. Comput. Commun. Rev. 6 (2002) 45–55.
18. Bonino da Silva Santos, L.O., van Sinderen, M., Ferreira Pires, L., Architectural Models for
Client Interaction on Service-Oriented Platforms, in Proceedings of the 1st International
Workshop on Architectures, Concepts and Technologies for Service Oriented Computing
(ACT4SOC 2007) in conjunction with the 2nd International Conference on Software and
Data Technologies (ICSOFT 2007), Barcelona, Spain, July 22, 2007.
78
