
MEMORY-EFFICIENT VIEW-DEPENDENT LEVEL OF DETAIL OF
HIGH-DETAILED MESHES
Mathias Holst and Heidrun Schumann
Institute of Computer Science, University of Rostock, Albert Einstein Str. 23, Rostock, Germany
Keywords:
Multi-Resolution, Out-of-Core, Real-Time Rendering.
Abstract:
In this paper we propose an effective and efficient out-of-core LOD framework for arbitrary irregular high-
detailed triangular meshes and scenes. We modify and extend the standard Multi-Triangulation framework
to reduce CPU load and to increase RAM efficiency by paging. To reduce the number of IO-operations
we propose a novel partitioning scheme well suitable for view-dependant LOD. In addition a fast but very
effective caching strategy is proposed, which bases on a LOD prediction for future frames. The efficiency of
our framework is shown by results.
1 INTRODUCTION
In this paper we focus on continuous LOD (short
CLOD). Generally speaking for this purpose a hierar-
chy or sequential list is generated for a given object
in a preprocess that contains the whole LOD spec-
trum. This structure is processed in every frame to
get a proper LOD relating some restrictions (e.g. tri-
angle number or image error). The benefits of CLOD
are a nearly seamless LOD-transition and a nearly op-
timal adaption of the polygon number to the desired
image quality. On the other hand, LOD estimation
can be slow (sometimes even slower than the follow-
ing polygon rendering) and the requirement of main
memory is high (generally a multiple of the original
model size).
To attenuate the memory costs we propose an out-
of-core framework, that contains a new algorithm to
increase memory efficiency by using secondary mem-
ory. This algorithm contains several strategies for
partitioning and caching to reduce the number of
necessary file operations. For this purpose we use
the elegant Multi-Triangulation (or Multi-Tesselation)
framework (short MT) developed by DeFloriani et al.
(Floriani et al., 1997), that we adapt to our needs.
This paper is structured as follows: In section 2
previous works are introduced. In section 3 we de-
scribe the basics of the MT hierarchy and its reduc-
tion to accelerate rendering. In section 4 our new al-
gorithm to handle the MT efficiently out-of-core is
described. At the end we show the efficiency of our
method by results in section 5 and give some conclud-
ing remarks in section 6.
2 PREVIOUS WORK
In this section we briefly summarize related publica-
tions that focus on out-of-core continuous level of de-
tail of polygonal meshes.
In (El-Sana and Chiang, 2000) a merge-tree is used
out-of-core. To reduce IO-operations a segmentation
of the original mesh into patches is proposed, using
the edge collapse order given by the simplification
error. This inherently preserves boundaries between
patches. The XFastMesh framework (DeCoro and
Pajarola, 2002) also uses a merge-tree, but a layer-
based partitioning and a very compact file format. A
space partitioning approach was proposed in (Lind-
strom, 2003). Here, the original model is quantized
to a regular 3D-grid which allows a memory-efficient
storage. In contrast to these frameworks, we use a
MT-hierarchy of static patches that can be described
and rendered more efficiently by using triangle strips.
The QuickVDR system (Yoon et al., 2005) also uses
323
Holst M. and Schumann H. (2007).
MEMORY-EFFICIENT VIEW-DEPENDENT LEVEL OF DETAIL OF HIGH-DETAILED MESHES.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - GM/R, pages 323-326
DOI: 10.5220/0002077003230326
Copyright
c
SciTePress
a hierarchical set of patches, which are independently
converted into progressive meshes and then merged
bottom-up. Another system is the Batched-MT frame-
work (Cignoni et al., 2005). Here, a leveled patch
partitioning of the original mesh is used from smaller
to larger patches. These patches are simplified with-
out changing the boundary. In doing so, a MT hier-
archy can be generated that contains many triangles
in its arcs
1
which is useful for a fast LOD render-
ing. We use a similar MT-hierarchy, but choose an
contrary approach. Firstly, a classical MT-hierarchy
is created that is reduced afterwards to increase arc
patches. Thus, we do not have any constrictions to
boundary simplification which seems to be a strong
constraint. Like QuickVDR the Batched-MT frame-
work does not manage the hierarchy out-of-core, but
only the geometry.
3 BASIC MT-FRAMEWORK
The MT is a general framework for fast adaptive es-
timation of many specific LOD for three-dimensional
triangular meshes. It is based on a local simplification
operator, which replaces an adjacent triangle set with
a less complex (and a generally smaller) one of the
same border. Without loss of generality we use edge-
collapse operators for this purpose. These operators
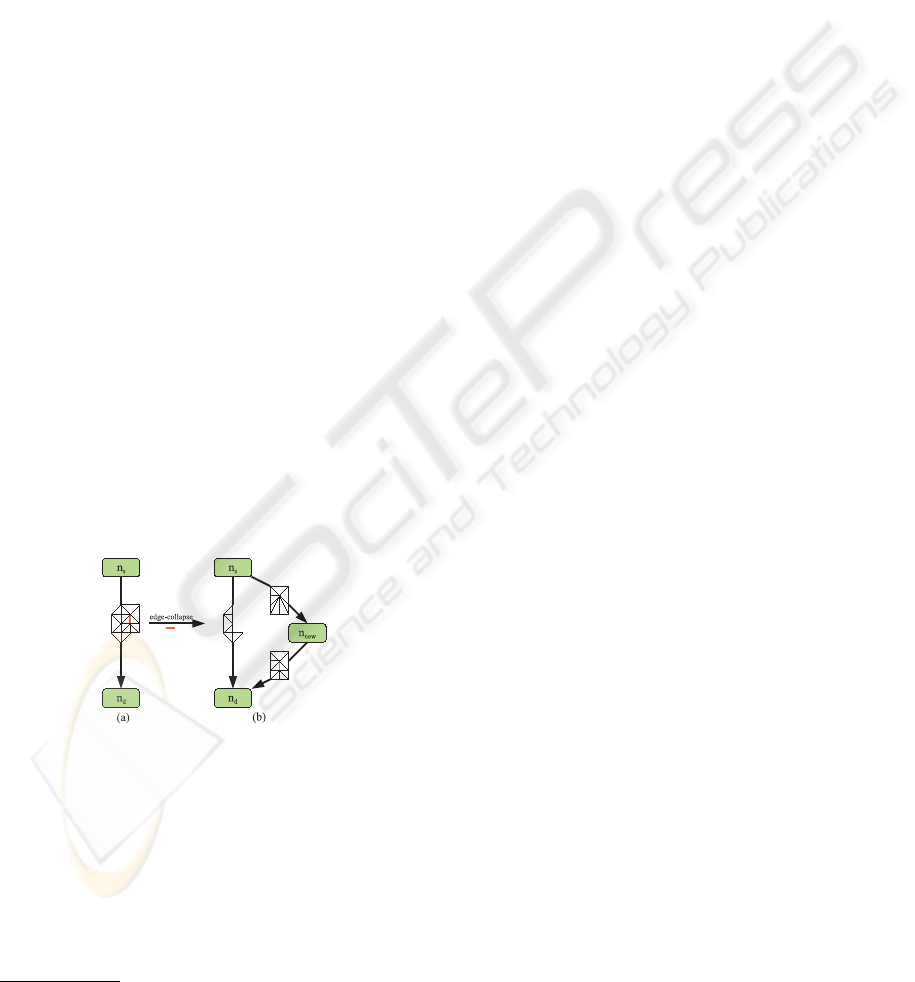
are represented as nodes in the corresponding MT hi-
erarchy, which is a DAG in general. The triangle set
that is simplified is represented by outgoing edges of
the node and the simplified set is represented by ingo-
ing edges (fig. 1(b)).
Figure 1: A given mesh and its initial MT (a). MT after one
edge-collapse operation (the thicker red edge is collapsed)
(b).
3.1 Hierarchy Reduction
A MT which was build using an edge-collapse opera-
tor contains about 5 times more triangles than the orig-
inal object. Even worse, it can be shown that every
1
Edges of MT-hierarchies are called arcs to distinguish
them from mesh edges.
hierarchy arc contains less than 2.5 triangles in aver-
age. Since every arc has to be rendered separately, the
CPU load is very high and optimizations, like triangle
strips, are less efficient.
Therefore it is useful to modify the MT to get
more compact in order to contain larger triangle sets
in its arcs. For this purpose we use the simplification
scheme, proposed in (Holst and Schumann, 2006). By
an iterative application of so called arc-collapse op-
erations in a well chosen order, the hierarchy can be
reduced very easily. How to determine this order is
described in (Holst and Schumann, 2006). This re-
duction is stopped, if an average patch size of 10 is
reached.
4 OUT-OF-CORE MT
Besides a fast LOD estimation and rendering our goal
is to decrease the amount of RAM required to store the
MT by an increased use of secondary memory. There-
fore, we have to store the MT in a file or, more gener-
ally, in a data array. In the following we will explain
the layout of such file. After this we show how the
efficiency of file processing can be increased.
4.1 File Layout
We decided to store not only the geometry data in the
MT-file, but also the hierarchy itself, to further deci-
mate RAM requirement. This is reasonable especially
for large hierarchies and complex scenes.
In most situations the LOD cut is only adapted
somewhat for the current frame. This means that if
a new arc is traversed its geometry is also likely used
for the new LOD. Therefore, it is appropriate to store
the geometry of an arc together with the arc, and not
in a separate file part.
When traversing the hierarchy, for every node its
outgoing and ingoing arcs are required. To support
a sequential data reading with few file accesses only
we decided to store after each node immediately its
outgoing arcs. To address an ingoing arc a = (n
′
, n) of
a node n we store a tuple consisting of the father node
index n
′
and the position index of the outgoing arc a
in n
′
.
The resulting file layout is shown in fig. 2.
4.2 Partitioning
Partitioning is a common technique to reduce file op-
erations. However, partitioning can lead to a reading
of much unused data. Therefore, it is useful to adapt
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
324

Figure 2: Layout of our MT file.
the partitioning scheme to the LOD selection mecha-
nism. But the iteration order of hierarchy nodes and
arcs is not predefined, in general. Thus, we propose to
use a local partitioning, which is based on the follow-
ing two observations:
• Nodes are often used together in one LOD, if they
are close in the hierarchy.
• If there are many arcs between two given parti-
tions, then the propability is high that both parti-
tions are used together for many LOD.
Starting from this, a partition scheme can be for-
mulated. Firstly, for every node n
i
∈
N a partition
p
i
= {n
i
} is created. Every connected partition pair is
inserted into a priority queue together with the number
of connecting arcs in increasing order. While process-
ing this queue, partition pairs are merged to form a
larger partition, but only if the size of the new parti-
tion does not exceed a given threshold θ. This avoids
an enlargement of already large partitions that have
many connecting arcs anyway. If two partition pairs
have the same number of connecting arcs, we prefer
that pair with the smallest layer span. Therefore, we
use a top-down layering of the hierarchy that is gen-
erated in a preprocess. In doing so, we prevent that
partitions contain too many different LOD. After cre-
ating a new partition out of two other ones, the queue
is updated with entries for this new partition. This is
done until the queue is empty.
It is not trivial to answer the question, which par-
tition size is appropriate, because it depends on the
application scenario. If there is only one object in the
scene, then a smaller partition size of θ ≤ 20 is appro-
priate, because only one file is accessed. Tests have
shown that if there are many objects in the scene the
partition size should be enlarged to 50−100, to reduce
file operations.
4.3 Node Caching
A consequence of reading partitions instead of nodes
is that more nodes and arcs are kept in main memory
than really used. We propose to cache them for fu-
ture frames, but only if the probability of using them
is high. To estimate such nodes we use a simple but
efficient selection criterion, which is based on the ob-
servation, that if a node is the father node (resp. child
node) of an arc in the cut that is estimated by a top-
down (resp. bottom-up) MT iteration, then this node
or nodes below (resp. above) this node probably will
be used in one of the following frames as well. To
distinguish these nodes from other obsolete partition
nodes, a fast criterion has to be found, that works
without a complete scan of all partition nodes in every
frame, because this would slow down LOD estimation
heavily.
For this purpose we use a layer based approach.
For every partition that is partially in main memory
we maintain two tuples T
min
= ( f
min
, l
min
) and T
max
=
( f
max
, l
max
) consisting of a frame index and a layer in-
dex. After a partition is loaded both tuples are initial-
ized with (−1,−1) to distinguish them from meaning-
ful tuples. If an arc a in the current cut was estimated
by a top-down iteration of the hierarchy, then we will
update T
min
of the father node’s and child node’s par-
tition as follows:
T
min
←
( f, min(l
min
, l
n
)), if f = f
min
( f, l
n
), otherwise
, (1)
where l
n
denotes the layer of the particular node and
f is the current frame number. Similarly, we update
T
max
if a was estimated by a bottom-up iteration:
T
max
←
( f, min(l
max
, l
n
)), iff = f
max
( f, l
n
), otherwise
, (2)
If an arc of the current cut was also in the cut of the
last frame then f
min
and f
max
has only be set to f.
We maintain a priority queue of all nodes in main
memory, sorted by the last frame they were part of a
cut (resp. LOD) in increasing order. If a new parti-
tion is loaded, then all nodes will be inserted into this
queue with frame index −1 because they do not be-
long to a LOD yet. After every frame, the queue is
iterated from the beginning until a node of the current
frame is reached. If an iterated node n is the father
or child node of an arc in the cut it is re-inserted into
this queue with the actual frame. Otherwise we use
T
min
and T
max
to decide whether to cache it for future
frames. If
( f
min
= f ∧ l
n
> l
min
) ∨ ( f
max
= f ∧ l
n
> l
max
), (3)
then n is kept. In fig. 3 this procedure is illustrated for
the top-down case.
MEMORY-EFFICIENT VIEW-DEPENDENT LEVEL OF DETAIL OF HIGH-DETAILED MESHES
325
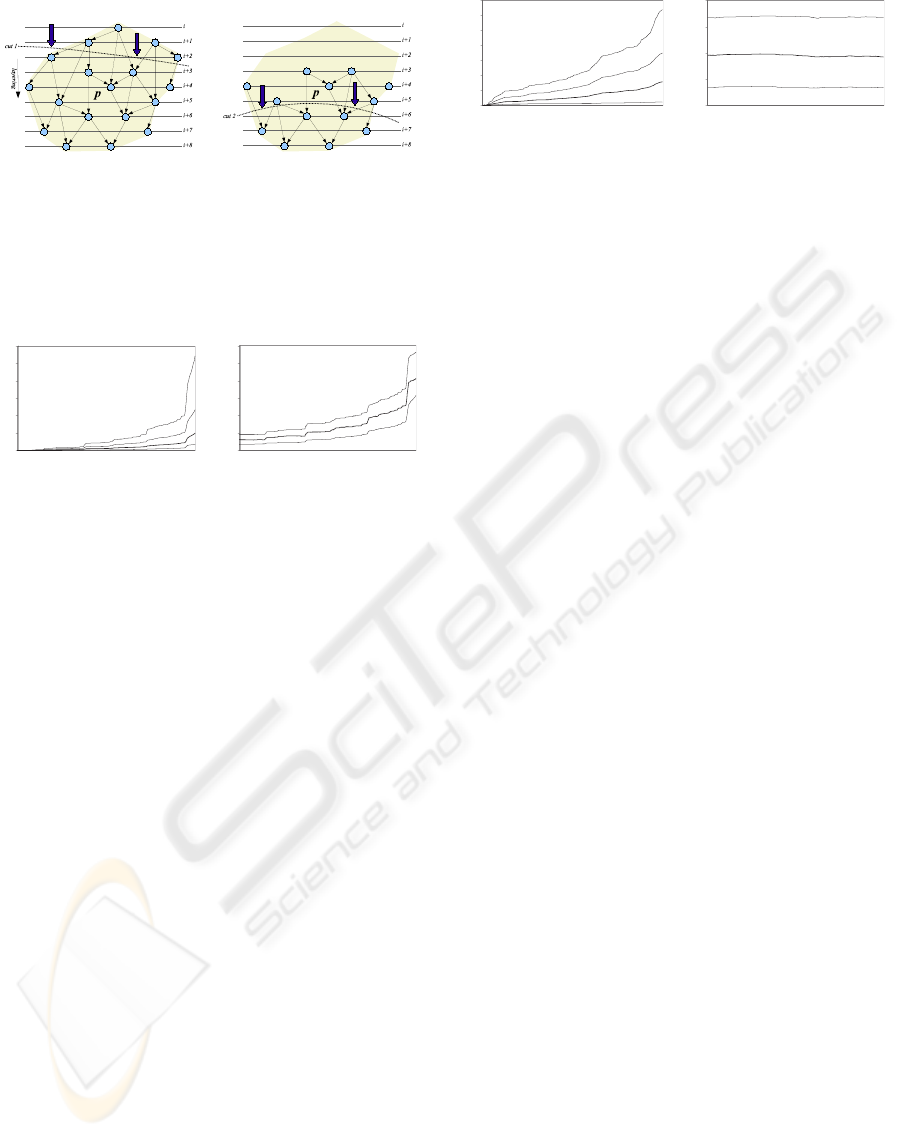
frame k frame (k+1)
T
min
=(i, k),T
max
=(−1,−1) T
min
=(i+3, k+1)
(a) (b)
Figure 3: Node caching algorithm: In frame k a certain par-
tition is loaded during a top down iteration (a). In frame
(k+1) the cut through this partition is moving down and
nodes on higher layer are deleted (b).
0
0002
0004
0006
0008
00001
00021
37115181226203
)C,P(
)CN,PN(
)CN,P(
)CC,P(
BM 0
BM 01
BM 02
BM 03
BM 04
BM 05
BM 06
37115181226203
)CN,P(,)CN,PN(
)C,P(
)CC,P(
(a) (b)
Figure 4: Results for moving object from far to near. Total
sum of io operations since begin (a) and memory require-
ment (b).
5 RESULTS
We compared our out-of-core approach, using parti-
tioning and caching (P,C), with three more simpler ap-
proaches:
1. No partitioning, no caching (NP,NC): All nodes
are loaded if they are required for MT-iteration,
and they are deleted afterwards, if they do not be-
long to the cut.
2. Partitioning, no caching (P,NC): The same as be-
fore, but nodes are loaded in a bundle using our
partitioning scheme.
3. Partitioning, conservative caching (P,CC): The
same as before, but nodes are deleted only if no
node of their partition belongs to the cut.
Exemplarily, the Armadillo object is used in two dif-
ferent situations: First, moving from far to near (fig.
4) and second, rotating around the y-axis in view
space (fig. 5). The sum of file accesses since ani-
mation begin (4(a),5(a)) and the memory requirement
(4(b),5(b) were measured during both simulations. As
it can be seen our approach provides a very good
trade-off. It needs slightly more file accesses than
(P,CC) but the memory requirement is halved on aver-
age with respect to (NP,NC) and (P,NC).
0
002
004
006
008
0001
0021
0041
°072°081°09°0
)CC,P(
)C,P(
)CN,P(
)CN,PN(
BM 02
BM 03
BM 04
BM 05
BM 06
°072°081°09°0
)CN,P(,)CN,PN(
)C,P(
)CC,P(
(a) (b)
Figure 5: Results for rotating object. Total sum of io opera-
tions since begin (a) and memory requirement (b).
6 CONCLUSION
In this paper we described a LOD-framework for arbi-
trary irregular 3D-meshes that provides a good trade-
off between rendering efficiency and memory effi-
ciency. It uses a reduced MT hierarchy. To increase
memory efficiency we handle the reduced MT out-of-
core. The number of file operations is reduced by us-
ing an effective and easy to implement partitioning
scheme. Moreover, a caching algorithm is proposed
to reduce unnecessary reloadings.
REFERENCES
Cignoni, P., Ganovelli, F., Gobbetti, E., Marton, F., Ponchio,
F., and Scopigno, R. (2005). Batched multi triangu-
lation. In Vis’05 conf.proc., Minneapolis, MI, USA.
IEEE Computer Society Press.
DeCoro, C. and Pajarola, R. (2002). Xfastmesh: fast view-
dependent meshing from external memory. In VIS ’02
conf.proc., pages 363–370, Washington, DC, USA.
IEEE Computer Society.
El-Sana, J. and Chiang, Y.-J. (2000). External memory
view-dependent simplification. Computer Graphics
Forum, 19(3):139–150.
Floriani, L. D., Magillo, P., and Puppo, E. (1997). Build-
ing and traversing a surface at variable resolution. In
Vis’97 conf.proc., pages 103–ff. IEEE Computer Soci-
ety Press.
Holst, M. and Schumann, H. (2006). Efficient render-
ing of high-detailed objects using a reduced multi-
resolution hierarchy. In GRAPP’06 conf.proc., pages
3–10, Set
´
ubal, Portugal. INSTICC Press.
Lindstrom, P. (2003). Out-of-core construction and vi-
sualization of multiresolution surfaces. In SI3D’03
conf.proc., pages 93–102, New York, NY, USA. ACM
Press.
Yoon, S.-E., Salomon, B., Gayle, R., and Manocha, D.
(2005). Quick-vdr: Out-of-core view-dependent ren-
dering of gigantic models. IEEE Transactions on Vi-
sualization and Computer Graphics, 11(4):369–382.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
326
