
INCREMENTAL PROCESSING OF TEMPORAL OBSERVATIONS IN
SUPERVISION AND DIAGNOSIS OF DISCRETE-EVENT SYSTEMS
Gianfranco Lamperti
Dipartimento di Elettronica per l’Automazione
Via Branze 38, 25123 Brescia, Italy
Marina Zanella
Dipartimento di Elettronica per l’Automazione
Via Branze 38, 25123 Brescia, Italy
Keywords:
Diagnosis, supervision, discrete-event systems, temporal observations, indexing techniques, uncertainty.
Abstract:
Observations play a major role in supervision and diagnosis of discrete-event systems (DESs). In a distributed,
large-scale setting, the observation of a DES over a time interval is not perceived as a totally-ordered sequence
of observable labels but, rather, as a directed acyclic graph, under uncertainty conditions. Problem solving,
however, requires generating a surrogate of such a graph, the index space. Furthermore, the observation
hypothesized so far has to be integrated at the reception of a new fragment of observation. This translates
to the need for computing a new index space every time. Since such a computation is expensive, a naive
generation of the index space from scratch at the occurrence of each observation fragment becomes prohibitive
in real applications. To cope with this problem, the paper introduces an incremental technique for efficiently
modeling and indexing temporal observations of DESs.
1 INTRODUCTION
Observations are the inputs to several tasks that can
be carried out by exploiting Model-Based Reasoning
techniques. Typically, they are the inputs to super-
vision, control and monitoring of physical processes
(Roz
´
e, 1997); they represent the symptoms of diag-
nosis (Brusoni et al., 1998); they are the clues for
history reconstruction (Baroni et al., 1997; Baroni
et al., 1999), and the test cases for software debug-
ging (Wotawa, 202; K
¨
ob and Wotawa, 2004) . Tem-
poral observations refer to dynamical systems and
processes, and are endowed not only with a logical
content, describing what has been observed, but also
with a temporal content, describing when it has been
observed.
1
Both (independent) aspects, can be mod-
eled either quantitatively or qualitatively. This paper
addresses the most qualitative abstraction of the no-
tion of a temporal observation, i.e. an observation
whose logical and temporal contents are both qualita-
tive. This abstraction is quite important since adopt-
ing qualitative models is an issue of Model-Based
Reasoning and Qualitative Physics as well, in far as
reasoning about (a finite number of) qualitative val-
1
Indeed, in several contexts, the time a value is observed
is not relevant, while it is interesting to know the time such
a value was generated by the considered system/process.
ues is easier and computationally cheaper. Moreover,
adopting a higher abstraction level first, so as to focus
attention, and a more detailed level later, is a princi-
ple of hierarchical model-based diagnosis (Mozeti
ˇ
c,
1991). A general model for (qualitative uncertain)
temporal observations was proposed in (Lamperti and
Zanella, 2002), and exploited for describing the in-
put of an a posteriori diagnosis task. Such a model
consists of a directed acyclic graph where each node
contains an uncertain logical content and each edge is
a temporal precedence relationship. Thus, the graph,
altogether, shows all the uncertain values observed
over a time interval and their partial temporal order-
ing. Each uncertain logical content ranges over a set
of qualitative values (labels). Therefore the observa-
tion graph implicitly represents all the possible se-
quences of labels consistent with the received tem-
poral observation, where each sequence is a sentence
of a language. Then, the observation graph, although
intuitive and easy to build from the point of view of
the observer, is unsuitable for processing. For any fur-
ther processing it is better to represent a language in
the standard way regular languages are represented
(Aho et al., 1986), that is, by means of a determin-
istic automaton. In (Lamperti and Zanella, 2002)
this automaton is called index space and it is built
as the transformation of a nondeterministic automa-
47
Lamperti G. and Zanella M. (2006).
INCREMENTAL PROCESSING OF TEMPORAL OBSERVATIONS IN SUPERVISION AND DIAGNOSIS OF DISCRETE-EVENT SYSTEMS.
In Proceedings of the Eighth International Conference on Enterprise Information Systems - AIDSS, pages 47-57
DOI: 10.5220/0002447200470057
Copyright
c
SciTePress

Figure 1: Power transmission network.
ton drawn from the observation graph. The problem
arises when the nodes of the observation graph are re-
ceived one at a time, typically in supervision and di-
agnosis of dynamical systems, in particular, discrete-
event systems (DESs). In fact, the supervision process
is required to react at each occurring piece of obser-
vation so as to generate appropriate diagnostic infor-
mation (Lamperti and Zanella, 2004a; Lamperti and
Zanella, 2004b). This translates to the need for gener-
ating a new index space at each new reception. How-
ever, a naive approach, that each time makes up the
new index space from scratch, would be inadequate
from the computational point of view. We need there-
fore an incremental technique for index-space gener-
ation.
2 APPLICATION DOMAIN
We consider a reference application domain of power
networks. A power network is composed of trans-
mission lines. Each line is protected by two breakers
that are commanded by a protection. The protection
is designed to detect the occurrence of a short circuit
on the line based on the continuous measurement of
its impedance: when the impedance goes beyond a
given threshold, the two breakers are commanded to
open, thereby causing the extinction of the short cir-
cuit. In a simplified view, the network is represented
by a series of lines, each one associated with a pro-
tection, as displayed in Fig. 1, where lines l
1
···l
4
are protected by protections p
1
···p
4
, respectively.
For instance, p
2
controls l
2
by operating breakers b
21
and b
22
. In normal (correct) behavior, both breakers
are expected to open when tripped by the protection.
However, the protection system may exhibit an ab-
normal (faulty) behavior, for example, one breaker or
both may not open when required. In such a case,
each faulty breaker informs the protection about its
own misbehavior. Then, the protection sends a re-
quest of recovery actions to the neighboring protec-
tions, which will operate their own breakers appro-
priately. For example, if p
2
operates b
21
and b
22
and
the latter is faulty, then p
2
will send a signal to p
3
,
which is supposed to command b
32
. A recovery ac-
tion may be faulty on its turn. For example, b
32
may
not open when tripped by p
2
, thereby causing a fur-
ther propagation of the recovery to protection p
4
. The
protection system is designed to propagate the recov-
ery request until the tripped breaker opens correctly.
Figure 2: Genesis of a temporal observation.
When the protection system is reacting, a subset of
the occurring events are visible to the operator in a
control room who is in charge of monitoring the be-
havior of the network and, possibly, to issue explicit
commands so as to minimize the extent of the isolated
subnetwork. Typical visible events are short (a short
circuit occurred on the line), open (a breaker opened),
close (a breaker closed), and end (the short circuit ex-
tinguished). Generally speaking, however, the local-
ization of the short circuit and the identification of the
faulty breakers may be impractical in real contexts,
especially when the extent of the isolation spans sev-
eral lines and the operator is required to take recovery
actions within stringent time constraints. On the one
hand, there is the problem of observability: the ob-
servable events generated during the reaction of the
protection system are generally incomplete and un-
certain in nature. On the other, whatever the observa-
tion, it is impractical for the operator to reason on the
observations so as to make consistent hypotheses on
the behavior of the system and, eventually, to estab-
lish the shorted line and the faulty breakers.
3 TEMPORAL OBSERVATIONS
A temporal observation O is the mode in which the
observable labels, generated by the evolution of a
DES, are perceived by the observer. Considering the
realm of asynchronous DESs, such as active systems
(Lamperti and Zanella, 2003), a history h of a sys-
tem is a sequence of component transitions, where
each transition refers to a communicating automa-
ton. Thus, h = T
1
,...,T
n
. Since a subset of
the transitions are visible, the system history is ex-
pected to generate a sequence of observable labels,
namely a temporal sequence
1
,...,
k
, where each
i
, i ∈ [1 .. k], is the label generated by a visible tran-
sition in h. However, due to the multiplicity of com-
munication channels between the (distributed) system
and the observer, and to noise on such channels, the
temporal observation O received by the observer is
likely to differ from the temporal sequence generated
by the system (see Fig. 2). Intuitively, O is a se-
quence of temporal fragments bringing information
about what/when something is observed. Formally,
let Λ be a domain of observable labels, possibly in-
cluding the null label ε.
2
A temporal fragment ϕ is a
2
The null label ε is invisible to the observer.
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
48

pair (λ, τ), where λ ⊆ Λ is called the logical content,
and τ is a set of fragments, called the temporal con-
tent. Specifically, O is a sequence of temporal frag-
ments, O = ϕ
1
,...,ϕ
n
, such that
∀i ∈ [1 .. n],ϕ
i
=(λ
i
,τ
i
)(τ
i
⊆{ϕ
1
,...,ϕ
i−1
}) .
The temporal content of a fragment ϕ is supposed to
refer to a (possibly empty) subset of the fragments
preceding ϕ in O. Thus, a fragment is uncertain in
nature, both logically and temporally. Logical un-
certainty means that λ includes the actual (possibly
null) label generated by a system transition, but fur-
ther spurious labels may be involved too. Temporal
uncertainty means that only partial ordering is known
among fragments. As such, both logical and temporal
uncertainty are a sort of relaxation of the temporal se-
quence generated by the system, the former relaxing
the actual visible label into a set of candidate labels,
the latter relaxing absolute temporal ordering into par-
tial ordering.
A sub-observation O
[i]
of O, i ∈ [0 .. n], is the
(possibly empty) prefix of O up to the i-th fragment,
O
[i]
= ϕ
1
,...,ϕ
i
.
Example 1. Let Λ={short, open,ε}, O = ϕ
1
,
ϕ
2
, ϕ
3
, ϕ
4
, where ϕ
1
=({short,ε}, ∅), ϕ
2
=
({open,ε}, {ϕ
1
}), ϕ
3
=({short, open}, {ϕ
2
}),
ϕ
4
=({open}, {ϕ
1
}). ϕ
1
, is logically uncertain (ei-
ther short or nothing is observed). ϕ
2
follows ϕ
1
and
is logically uncertain (open vs. nothing). ϕ
3
follows
ϕ
2
and is logically uncertain (short vs. open). ϕ
4
fol-
lows ϕ
1
and is logically certain (open). However, no
temporal relationship is defined between ϕ
4
and ϕ
2
or ϕ
3
. 2
Based on Λ, a temporal observation O =
ϕ
1
,...,ϕ
n
can be represented by a DAG, called an
observation graph,
γ(O)=(Λ, Ω, E)
where Ω={ω
1
,...,ω
n
} is the set of nodes isomor-
phic to the fragments in O, each node being marked
by a nonempty subset of Λ, and E is the set of edges
isomorphic to the temporal content of fragments in O:
∀ω
i
∈ Ω,ϕ
i
=(λ
i
,τ
i
),ϕ
j
∈ τ
i
(N
j
→ N
i
∈ E),
∀(ω
j
→ ω
i
∈ E)(ϕ
j
∈ τ
i
,ϕ
i
=(λ
i
,τ
i
)).
A precedence relationship is defined between nodes
of the graph, specifically, ω ≺ ω
means that γ(O)
includes a path from ω to ω
, while ω ω
means
either ω ≺ ω
or ω = ω
.
Example 2. Consider the observation O defined
in Example 1. The relevant observation graph
γ(O) is shown in Fig. 3. Note how γ(O) implic-
itly contains several candidate temporal sequences,
each candidate sequence generated by picking up
a label from each node of the graph without vi-
olating the partially-ordered temporal relationships
Figure 3: Observation graph γ(O).
among nodes. Possible candidates are, among oth-
ers, short, open, short, open, short, open, open,
and short , open.
3
However, we do not know which
of the candidates is the actual temporal sequence gen-
erated by the system, the other ones being the spu-
rious candidate sequences. Consequently, from the
observer viewpoint, all candidate sequences share the
same ontological status. 2
4 INDEXING OBSERVATIONS
The rationale of the paper is that, both for computa-
tional and space reasons, the observation graph is in-
convenient for carrying out a task that takes as input
a temporal observation. This claim applies to linear
observations as well, which are merely a sequence O
of observable labels. In this case, it is more appropri-
ate to represent each sub-observation O
⊆ O as an
integer index i corresponding to the length of O
.As
such, i is a surrogate of O
. The same approach have
been proposed for graph-based temporal observations
(Lamperti and Zanella, 2000). However, we need ex-
tending the notion of an index appropriately and make
model-based reasoning on a surrogate of the temporal
observation, called an index space.
Let γ(O)=(Λ, Ω, E) be an observation graph. A
prefix P of O is a (possibly empty) subset of Ω where
∀ ω ∈P( ω
∈P(ω
≺ ω)).
The formal definition of an index space is supported
by the introduction of two functions on P. The set of
consumed nodes up to P is
Cons(P)={ω | ω ∈ Ω,ω
∈P,ω ω
}. (1)
The set of consumable nodes from P, called the fron-
tier of P, is defined as
Front (P)={ω | ω ∈ (Ω − Cons(P)),
∀(ω
→ ω) ∈ E (ω
∈ Cons(P))}. (2)
3
The fact that the length of a candidate temporal se-
quence may be shorter than the number of nodes in the ob-
servation graph comes from the immateriality of the null
label ε, which is ‘transparent’. For instance, candidate
ε, ε, short , open is in fact short, open.
INCREMENTAL PROCESSING OF TEMPORAL OBSERVATIONS IN SUPERVISION AND DIAGNOSIS OF
DISCRETE-EVENT SYSTEMS
49

Example 3. Considering γ(O) in Fig. 3, with P =
{ω
2
,ω
4
},wehaveCons(P)={ω
1
,ω
2
,ω
4
} and
Front (P)={ω
3
}. 2
The two functions defined on an index are formally
related to one another by Theorem 1.
Theorem 1. The frontier of an index is empty iff the
set of consumable nodes of equals the set of nodes
of the observation graph:
Front ()=∅⇐⇒Cons()=Ω. (3)
Proof (sketch). When Ω=∅ (empty observa-
tion), Eq. (3) is trivially proven. Thus, we assume
Ω = ∅. Considering Front ()=∅, based on Eq. (2),
we have {ω | ω ∈ (Ω − Cons()), ∀(ω
→ ω) ∈
E (ω
∈ Cons())} = ∅. Assume Cons() ⊂ Ω.
Let ¯ω ∈ (Ω − Cons()). Three scenarios are possi-
ble:
(a) ∀(ω
→ ¯ω) ∈ E (ω
∈ Cons()). In this case,
Eq. (2) is satisfied for ω =¯ω, that is, Front () =
∅, a contradiction.
(b) ω
(ω
→ ¯ω ∈ E). Even in this case, Eq. (2)
is satisfied for ω =¯ω, as the condition ∀(ω
→
ω) ∈ E (ω
∈ Cons()) is trivially true. Thus,
Front () = ∅, a contradiction.
(c) ∃(ω
→ ¯ω) ∈ E (ω
/∈ Cons()). This sce-
nario makes the universal predicate in Eq. (2) false.
However, we may choose a different node in (Ω −
Cons()), rather than ¯ω, specifically one of the ω
satisfying the existential predicate in scenario (c).
This way, the above three scenarios are possible
for the new node too. In particular, if either (a)
or (b) holds, Front () = ∅, a contradiction. If
(c) holds, the same considerations are repeated re-
cursively, until either (a) or (b) holds. Since the
observation graph is a DAG, such a recursion will
end at the either (a) or (b), that is, Front () = ∅,a
contradiction.
Thus, Front ()=∅ =⇒ Cons()=Ω. Con-
versely, assume Cons()=Ωand Front () = ∅.
Based on Eq. (2), Front () includes an ω in
(Ω − Cons()) = ∅, a contradiction. Thus,
Cons()=Ω =⇒ Front ()=∅.
Let O be a temporal observation. The prefix space
of O is the nondeterministic automaton
Psp(O)=(S
n
, L
n
, T
n
,S
n
0
, S
n
f
)
where
S
n
= {P | P is a prefix of O}
is the set of states,
L
n
= { | ∈ λ, (λ, τ) ∈ Ω}
is the set of labels,
S
n
0
= ∅
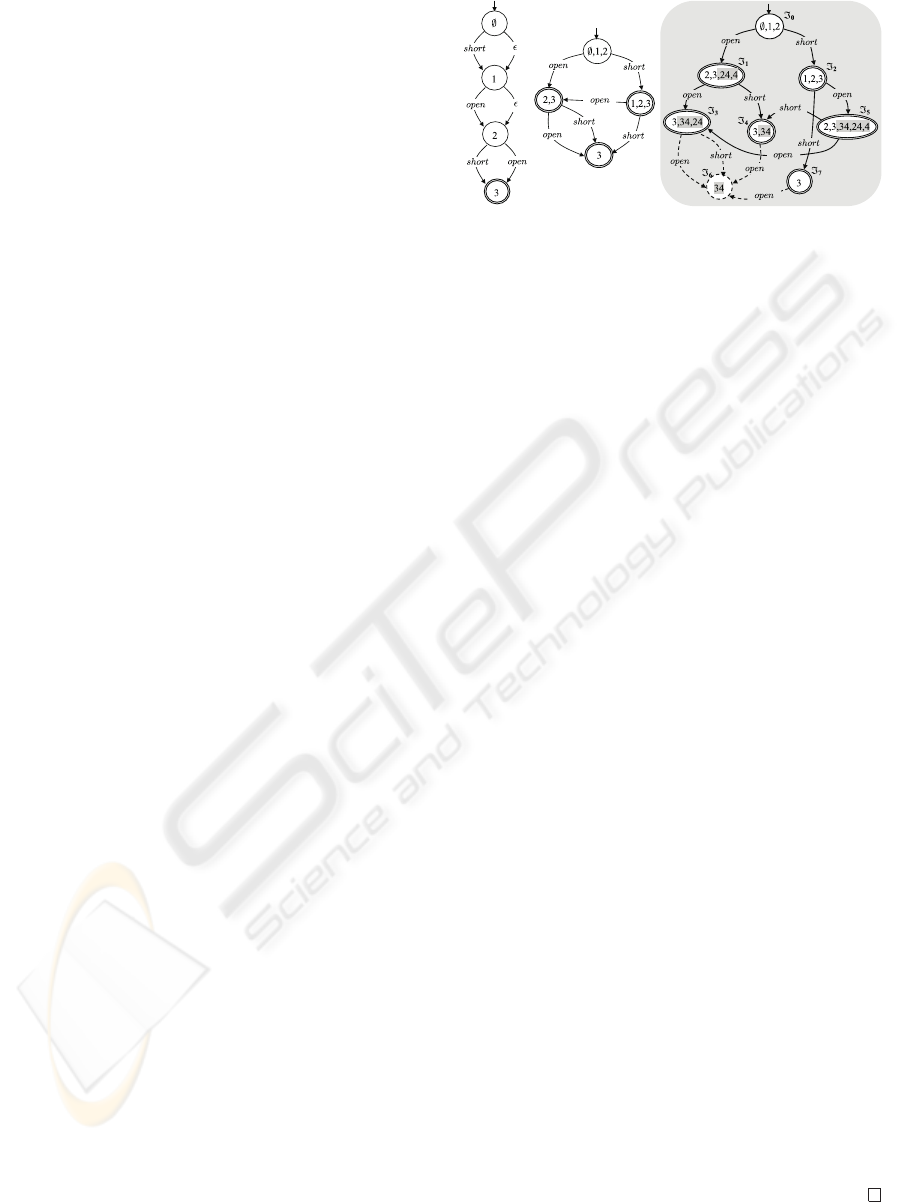
Figure 4: Prefix space Psp(O) and index space Isp(O),
where O is depicted in Fig. 3.
is the initial state,
S
n
f
= {P | P ∈ S
n
, Cons(P)=Ω}
is the set of final states, and T
n
: S
n
× L
n
→ 2
S
n
is the transition function such that P
−→P
∈ T
n
iff,
defining the ‘⊕’ operation as
P⊕ω =(P∪{ω}) −{ω
| ω
∈P,ω
≺ ω}, (4)
we have:
ω ∈ Front (P),ω =(λ, τ),∈ λ, P
= P⊕ω.
The index space of O is the deterministic automaton
Isp(O)=(S, L, T,S
0
, S
f
)
equivalent to Psp(O). Each state in Isp(O) is an in-
dex of O. The peculiarity of an index space is that
each path from S
0
to a final state is a mode in which
we may choose a label in each node of the observation
graph γ(O) based on the partial ordering imposed by
γ(O) (Lamperti and Zanella, 2002).
Example 4. Consider γ(O) in Fig. 3. Shown in Fig. 4
are the prefix space Psp(O) (left) and the index space
Isp(O) (shaded). Each prefix is written as a string
of digits, e.g., 24 stands for P = {ω
2
,ω
4
}. Fi-
nal state are double circled. According to the stan-
dard algorithm that transforms a nondeterministic au-
tomaton to a deterministic one (Aho et al., 1986),
each node of Isp(O) is identified by a subset of the
nodes of Psp(O). Nodes in Isp(O) have been named
0
···
7
. These are the indexes of O. 2
As for observations, we may define a restriction of
the index space up to the i-th fragment as follows. Let
Isp(O)=(S, L, T,S
0
, S
f
) be an index space, where
γ(O)=(Λ, Ω, E), Ω={ω
1
,...,ω
n
}. Let S be a
node in S. The sub-node S
[i]
of S, i ∈ [0 .. n],is
S
[i]
=
S
0
if i =0
{ | ∈ S, ∀ω
j
∈(j ≤ i)} otherwise.
(5)
The sub-index space Isp
[i]
of O, i ∈ [0 .. n],isan
automaton
Isp
[i]
(O)=(S
, L
, T
,S
0
, S
f
)
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
50
where
S
= {S
| S ∈ S,S
= S
[i]
,S
= ∅}
T
= {T
| T ∈ T,T = S
1
−→ S
2
,
T
= S
1
−→ S
2
,S
1
= S
1
[i]
,
S
1
= ∅,S
2
= S
2
[i]
,S
2
= ∅}
L
= { | S
1
−→ S
2
∈ T
}
S
f
= {S
| S
∈ S
, ∈S
,
Cons()={ω
1
,...,ω
i
}}.
The formal relationship between sub-observations
and sub-index spaces is stated by Theorem 2.
Theorem 2. The sub-index space of an observation
equals the index space of the sub-observation,
Isp
[i]
(O)=Isp(O
[i]
). (6)
Proof (sketch). The proof is supported by two lem-
mas. Lemma 2.1 is based on the relationship between
a nondeterministic automaton, A
n
, and its equivalent
deterministic one, A
d
, based on the subset construc-
tion (Aho et al., 1986). Closure(N
n
) denotes the clo-
sure of node N
n
in A
n
. This is the set made up by
N
n
and all the nodes that are reachable from N
n
via
ε-transitions in A
n
. Lemma 2.2 is grounded on the
definition of Psp(O) and, particularly, on Eq. (4).
Lemma 2.1. Let N
1
−→ N
2
be a transition in an index
space Isp(O). Then,
(i) There exists
¯
N
1
,
¯
N
1
⊆ N
1
,
¯
N
1
= ∅, such that
∀ ∈
¯
N
1
(
−→
∈ Psp(O),
∈ N
2
,
Closure(
) ⊆ N
2
);
(ii) All
∈ N
2
meet the condition stated in point (i).
Lemma 2.2. Let
−→
be a transition in Psp(O).
Let Max () denote the most recent fragment of in
O, Max ()=i | ω
i
∈, ∀ω
j
∈(j ≤ i). Then,
Max (
) ≥ Max ().
Theorem 2 can be proved by induction on the nodes
of the two automata in Eq. (6). The basis states the
equality of the initial states. Let S
0
and S
0
be the
initial states of Isp
[i]
(O) and Isp(O
[i]
), respectively.
Based on the lemmas above and Eq. (5), an index
∈S
0
belongs to the closure of the root of Psp(O)
and is only composed of nodes ω
j
such that j ≤ i.
Thus, ∈S
0
. Conversely,
∈ S
0
belongs to the
closure of the root of Psp(O
[i]
) and is only composed
of nodes ω
j
such that j ≤ i, thereby
∈ S
0
.In
other terms, S
0
= S
0
. Now we show the equality of
the transition functions.
Assume a transition N
1
−→ N
2
∈ Isp
[i]
(O), where
N
1
is also a node in Isp(O
[i]
). We show that the same
Figure 5: Psp(O
[3]
), Isp(O
[3]
), and Isp
[3]
(O).
transition is in Isp(O
[i]
) too. Since N
1
and N
2
are
the sub-nodes of two nodes in Isp(O), namely N
+
1
and N
+
2
, respectively, N
2
will not include the indexes
such that
−→
∈ Psp(O),
∈ Closure(
),
and either ∈(N
+
1
− N
1
) or ω
j
∈
where j>i.
Let
2
∈ N
2
. As such,
2
only includes indexes
ω
j
where j ≤ i. Thus,
2
is reachable in Psp(O)
from an index in N
1
via a path of transitions, the first
being marked by and the other ones by ε, each of
them relevant to a node ω
j
where j ≤ i. There-
fore, there exists a transition in Isp(O
[i]
) that is rooted
in N
1
and is marked by , reaching a node N
2
em-
bodying
2
. We have to show that N
2
= N
2
. As-
sume
2
∈ N
2
. As such,
2
∈ Closure(
1
) where
1
−→
1
∈ Psp(O
[i]
),
1
∈ N
1
, and each involved
transition is relevant to a node ω
j
such that j ≤ i.
Thus, the same sequence of consumptions of ω
j
ap-
plies to a path in Psp(O) that is rooted in
1
∈ N
1
.
Consequently,
2
∈ N
2
. In other terms, N
2
= N
2
,
thereby N
1
−→ N
2
∈ Isp(O
[i]
).
Assume a transition N
1
−→ N
2
∈ Isp(O
[i]
), where
N
1
is also a node in Isp
[i]
(O). We show that the
same transition is in Isp
[i]
(O). Consider an index
2
∈ N
2
. As such,
2
∈ Closure(
1
) where
1
−→
1
∈ Psp(O
[i]
),
1
∈ N
1
, and each in-
volved transition is relevant to a node ω
j
such that
j ≤ i. Thus, there exists a transition in Isp
[i]
(O) that
is rooted in N
1
and is marked by , reaching a node
N
2
embodying
2
. We have to show that N
2
= N
2
.
Assume
2
∈ N
2
. Following the same considerations
applied above we come to the conclusion that
2
is
reachable in Psp(O ) from an index in N
1
via a path
of transitions, the first being marked by and the other
ones by ε, each of them relevant to a node ω
j
where
j ≤ i. Therefore, there exists a transition in Isp(O
[i]
)
that is rooted in N
1
and is marked by , reaching a
node N
2
embodying
2
. Therefore, N
2
= N
2
, hence,
N
1
−→ N
2
∈ Isp
[i]
(O), which concludes the induc-
tion step and the proof of the theorem.
Example 5. Consider the observation O displayed in
Fig. 3 and relevant index space in Fig. 4. We show
INCREMENTAL PROCESSING OF TEMPORAL OBSERVATIONS IN SUPERVISION AND DIAGNOSIS OF
DISCRETE-EVENT SYSTEMS
51

Figure 6: Effect of Merge(N,N
).
that, according to Theorem 2, Isp
[3]
(O)=Isp(O
[3]
).
To this end, shown on the left-hand side of Fig. 5
is the prefix space Psp(O
[3]
), while the relevant in-
dex space Isp(O
[3]
) is depicted on the center. On
the right-hand side of the figure is a transformation
of the index space Isp(O) outlined in Fig. 4. Specif-
ically, each node S in Isp(O) has been transformed
into the subnode S
[3]
by removing some (possibly all)
of the indexes, as established by Eq. (5). For in-
stance, in node
5
, three, out of five indexes, have
been dropped, namely 34, 24, and 4 (which stand for
{ω
3
,ω
4
}, {ω
2
,ω
4
}, and {ω
4
}, respectively), thereby
producing the sub-node marked by 2 and 3. Note
how the sub-node of
6
becomes empty after the re-
moval of (the only) index 34. Based on the definition
of sub-index space, empty nodes are not part of the
result. This is why
6
and all entering edges are in
dotted lines. A further peculiarity is the occurrences
of duplicated sub-nodes, as for example {
3
,
4
,
7
}
and {
1
,
5
}. Each set of replicated nodes forms
an equivalence class of sub-nodes which results in
fact in a single node in the sub-index space. Thus,
{
3
,
4
,
7
} and {
1
,
5
} are collapsed into nodes
3 and 2, 3, respectively. This aggregation causes
edges entering and/or exiting nodes in each equiva-
lence class to be redirected to the corresponding sub-
node in the result. Performing such arrangements on
the graph and removing the dotted part, we obtain in
fact the same graph depicted on the center of Fig. 5,
namely Isp(O
[3]
). This confirms Theorem 2. 2
5 INCREMENTAL INDEXING
In case we need to perform the computation of
the index space of each sub-observation of O =
ϕ
1
,...,ϕ
n
, namely Isp(O
[i]
), i ∈ [1 .. n], the point
is, it is prohibitive to calculate each new index space
from scratch at the occurrence of each fragment ϕ
i
,
as this implies the construction of the nondetermin-
istic Psp(O
[i]
) and its transformation into the deter-
ministic Isp(O
[i]
). A better approach would be gener-
ating the new index space incrementally, based on the
previous index space and the new observation frag-
ment, avoiding the generation and transformation of
the nondeterministic automaton Psp(O).
This is performed by an algorithm called Incre-
Figure 7: Effect of Duplicate(N
−→ N
, P
).
ment (see below), which generates the new observa-
tion graph γ(O
[i]
) and relevant index space Isp(O
[i]
),
based on the previous observation graph γ(O
[i−1]
),
the relevant index space Isp(O
[i−1]
) , and the new
fragment ϕ
i
. In so doing, Increment is supported by
three auxiliary subroutines, Clone, Merge, and Du-
plicate. Such subroutines are defined in Lines 9–56,
before the body of Increment.
Function Clone (Lines 9–20) determines whether a
node N
+
, identified by the union of a set N of pre-
fixes and a prefix P for O
[i]
, belongs to the current set
S
i
of nodes of the index space. If so, N
+
is returned,
otherwise nil is returned.
Procedure Merge (Lines 21–38) merges two nodes
N and N
of the index space, along with relevant
edges, as shown in Fig. 6. This operation occurs when
N is to be extended with a new prefix P
, where
N ∪{P
} is in fact N
. To do so, all edges enter-
ing/leaving N are redirected to/from N
(Lines 28–
33), while N is removed (Line 34). In Lines 35–37,
the set B is updated. B is a variable (initialized by
Increment) called the bud set. Each element in B is
a triple (N, P,ω), called a bud, where N is a node
of the index space, P a prefix in N , and ω a node
of the observation graph belonging to the frontier of
P. A bud indicates that N needs further processing.
Once processed, the bud is removed from B.How-
ever, processing a bud possibly causes the generation
of new buds. In Lines 35–37, Merge drops the buds
relevant to N, while creating the corresponding buds
in N
.
Procedure Duplicate (Lines 39–56) takes as input
an edge N
−→ N
of the index space and a prefix
P
. As shown in Fig. 7, it generates a new node
N
∗
= N
∪{P
} (Lines 46–47), redirects the input
edge (Line 48), and duplicates all the edges leaving
N
with corresponding edges leaving N
∗
(Lines 49–
51). Finally, it updates the bud set by inserting new
buds relevant to N
∗
(Line 52) and by duplicating the
buds relevant to N
with corresponding buds in N
∗
(Lines 53–55).
The body of Increment is within Lines 57–114. It
is conceptually divided into three sections: initializa-
tion (Lines 58–66), core (Lines 67–112), and termi-
nation (Line 113). The initialization section generates
the new observation graph γ(O
[i]
) (Lines 58–61) and
the initial values of the elements of Isp(O
[i]
) but S
f
i
(Lines 62–65). Besides, it creates the bud set B, with
initial buds based on the new fragment ϕ
i
. The core
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
52

section is a loop iterating until the emptiness of the
bud set. At each iteration, a new bud B =(N,P,ω)
is considered (Line 68) and a new prefix P
is gen-
erated (Line 69). Each label relevant to the logi-
cal content λ of ω is then considered (Lines 70–110).
Eleven scenarios are to be distinguished, specifically:
(a) = ε, N
= N ∪{P
} already exists in S
i
, and
N
= N: N and N
are merged (Lines 71–75);
(b) = ε, N
= N ∪{P
} already exists in S
i
, and
N
= N: no operation is performed (Line 75);
(c) = ε and N
= N ∪{P
} is a new node: N is
extended with P
and B is updated with the new
buds relevant to P
(Lines 76–78);
(d) = ε, there is no edge leaving N marked by , and
N
= {P
} already exists: a new edge N
−→{P
}
is created (Lines 80–82);
(e) = ε, there is no edge leaving N marked by , and
N
= {P
} does not exists: a new node N
= {P
}
and a new edge N
−→ N
are created, and B is up-
dated with the new buds relevant to P
(Lines 83–
87);
(f) = ε, there exists an edge N
−→ N
, no other edge
enter N
,
¯
N = N
∪{P
} already exists, and
¯
N =
N
: N
and
¯
N are merged (Lines 90–95);
(g) = ε, there exists an edge N
−→ N
, no other edge
enter N
,
¯
N = N
∪{P
} already exists, and
¯
N =
N
: no operation is performed (Line 95);
(h) = ε, there exists an edge N
−→ N
, no other edge
enter N
, and
¯
N = N
∪{P
} does not exist: P
is inserted into N
and B is updated with new buds
relevant to P
(Lines 96–98);
(i) = ε, there exists an edge N
−→ N
, there exists
another edge entering N
,
¯
N = N
∪{P
} already
exists, and
¯
N = N
: edge N
−→ N
is substituted
by N
−→
¯
N (Lines 100–104);
(j) = ε, there exists an edge N
−→ N
, there exists
another edge entering N
,
¯
N = N
∪{P
} already
exists, and
¯
N = N
: no operation is performed
(Line 104);
(k) = ε, there exists an edge N
−→ N
, there ex-
ists another edge entering N
, and N
∪{P
}
does not exist: Duplicate(N
−→ N
, P
) is called
(Lines 105–106).
In the termination section (Line 113), the set of final
nodes of the new index space is generated: a node
N is final iff it contains a prefix P whose frontier is
empty.
1. I ncrement(γ(O
[i−1]
), Isp(O
[i−1]
),ϕ
i
,γ(O
[i]
), Isp(O
[i]
))
2. input
3. γ(O
[i−1]
)=(Λ
i−1
, Ω
i−1
, E
i−1
),
4. Isp(O
[i−1]
)=(S
i−1
, L
i−1
, T
i−1
,S
0
i−1
, S
f
i−1
);
5. ϕ
i
=(λ
i
,τ
i
): the i-th fragment of O;
6. output
7. γ(O
[i]
)=(Λ
i
, Ω
i
, E
i
),
8. Isp(O
[i]
)=(S
i
, L
i
, T
i
,S
0
i
, S
f
i
);
9. function C lone(N,P): either a node in S
i
or nil
10. input
11. N = {P
1
,...,P
k
}: a set of prefixes of O
[i]
,
12. P: a prefix of O
[i]
;
13. begin {Clone}
14. N
+
:= N ∪{P};
15. if N
+
∈ S
i
then
16. return(N
+
)
17. else
18. return(nil)
19. end if
20. end {Clone};
21. procedure M erge(N, N
)
22. input
23. N: a node in S
i
,
24. N
: a node in S
i
;
25. side effects
26. Merging of N and N
;
27. begin {Merge}
28. for each N
−→ N ∈ T
i
do
29. T
i
:= (T
i
∪{N
−→ N
}) −{N
−→ N}
30. end for;
31. for each N
−→ N
∈ T
i
do
32. T
i
:= (T
i
∪{N
−→ N
}) −{N
−→ N
}
33. end for;
34. S
i
:= S
i
−{N };
35. for each (N, P,ω) ∈ B do
36. B := (B −{(N, P,ω)}) ∪{(N
, P,ω)}
37. end for
38. end {Merge};
39. procedure D uplicate(N
−→ N
, P
)
40. input
41. N
−→ N
: an edge in T
i
,
42. P
: a prefix of O
[i]
;
43. side effects
44. Creation of node N
∗
= N
∪{P
} and edges;
45. begin {Duplicate}
46. N
∗
:= N
∪{P
};
47. S
i
:= S
i
∪{N
∗
};
48. T
i
:= (T
i
−{N
−→ N
}) ∪{N
−→ N
∗
};
49. for each N
x
−→ N
∈ T
i
do
50. T
i
:= T
i
∪{N
∗
x
−→ N
}
51. end for;
52. B := B ∪{(N
∗
, P
,ω
) | ω
∈ Fro nt (P
)};
53. for each (N
, P,ω) ∈ B do
54. B := B ∪{(N
∗
, P,ω)}
55. end for
56. end {Duplicate};
57. begin{Increment}
58. Λ
i
:= Λ
i−1
∪ λ
i
;
INCREMENTAL PROCESSING OF TEMPORAL OBSERVATIONS IN SUPERVISION AND DIAGNOSIS OF
DISCRETE-EVENT SYSTEMS
53

59. ω
i
:= a new node marked by λ
i
;
60. Ω
i
:= Ω
i−1
∪{ω
i
};
61. E
i
:= E
i−1
∪{ω → ω
i
| ω ∈ τ
i
};
62. S
i
:= S
i−1
;
63. L
i
:= Λ
i
−{ε};
64. T
i
:= T
i−1
;
65. S
0
i
:= S
0
i−1
;
66. B := {(N,P,ω
i
) | N ∈ S
i
, P∈N,
ω
i
∈ Fro nt (P)} ;
67. repeat
68. B := (N, P,ω), where B ∈ B, ω =(λ, τ );
69. P
:= P⊕ω;
70. for each ∈ λ do
71. if = ε then
72. if (N
:= C lone(N, P
)) = nil then
73. if N
= N then
74. M erge(N, N
)
75. end if
76. else
77. N := N ∪{P
};
78. B := B ∪{(N, P
,ω
) | ω
∈ Fro nt (P
)}
79. end if
80. elsif N
−→ N
∗
/∈ T
i
then
81. if {P
}∈S
i
then
82. T
i
:= T
i
∪{N
−→{P
}}
83. else
84. N
:= {P
};
85. S
i
:= S
i
∪{N
};
86. T
i
:= T
i
∪{N
−→ N
};
87. B := B ∪{(N
, P
,ω
) | ω
∈ Fro nt (P
)}
88. end if
89. else
90. N
:= the node such that T = N
−→ N
∈ T
i
;
91. if T
(T
∈ T
i
,T
= N
−→ N
,T
= T ) then
92. if (
¯
N := C lone(N
, P
)) = nil then
93. if
¯
N = N
then
94. M erge(N
,
¯
N)
95. end if
96. else
97. N
:= N
∪{P
};
98. B := B ∪{(N
, P
,ω
) | ω
∈ Fro nt (P
)}
99. end if
100. else
101. if (
¯
N := C lone(N
, P
)) = nil then
102. if
¯
N = N
then
103. T
i
:= (T
i
−{N
−→ N
}) ∪{N
−→
¯
N}
104. end if
105. else
106. Duplicate(N
−→ N
, P
)
107. end if
108. end if
109. end if
110. end for;
111. B := B −{B}
112. until B = ∅;
113. S
f
i
:= {N | N ∈ S
i
, P∈N, Front (P)=∅}
114. end {Increment}.
Example 6. Consider the observation graph γ(O)
in Fig. 3, and the index space Isp(O) shaded in
Fig. 4. We now show the application of Increment
that, based on γ(O
[3]
), Isp(O
[3]
), and ϕ
4
, directly
generates Isp(O
[4]
).
Shaded on the top-left of Fig. 8 is the computa-
tional state of procedure Increment after the initial-
ization (ending at Line 66). The graph represents
Isp(O
[3]
), with some extra information. Specifically,
each bud (N,P,ω
i
) ∈ B is represented by P
i
in node
N. For example, bud (N
2
, {ω
3
},ω
4
) is written in N
2
as 3
4
. The subsequent graphs in Fig. 8 depict the com-
putational state of Isp(O
[4]
) at ech new iteration of
the loop starting at Line 67. According to the initial
(shaded) graph, at first, B includes eight buds.
Considering the core section, the loop (Lines 67–
112) is iterated fourteen times:
(1) The chosen bud B in Line 68 is shaded in the cor-
responding pictorial representation. So, the bud
picked up at the first iteration is (N
3
, {ω
3
},ω
4
),
where λ(ω
4
)={open
1
}. At Line 69, P
=
{ω
3
}⊕ω
4
= {ω
3
,ω
4
}. Consequently, the inner
loop at Line 70 is iterated once for = open. This
corresponds to scenario (e) in the previous classifi-
cation: the new node N
4
is created and linked from
N
3
by an edge marked by open, as shown in graph
Step
1
. However, no new bud is inserted into B,as
Front ({ω
3
,ω
4
})=∅.
(2) B =(N
2
, {ω
3
},ω
4
), λ = {open}, and P
=
{ω
3
,ω
4
}. This corresponds to scenario (k): node
N
5
is generated by the duplicate procedure; how-
ever, no new bud is inserted into B.
(3) B =(N
1
, {ω
3
},ω
4
), λ = {open}, P
= {ω
2
,ω
4
},
scenario (k): node N
6
is generated by duplication;
moreover, a new bud (N
6
, {ω
2
},ω
4
) is inserted.
(4) B =(N
2
, {ω
2
},ω
4
), λ = {open}, P
= {ω
2
,ω
4
},
scenario (k): node N
7
is generated by duplication;
moreover, a new bud (N
6
, {ω
2
,ω
4
},ω
3
) is created.
(5) B =(N
7
, {ω
2
,ω
4
},ω
3
), λ = {short, open},
and P
= {ω
2
,ω
4
}.For = short, this corre-
sponds to scenario (d): edge N
7
open
−−−→ N
4
is cre-
ated (Line 82). For = open, scenario (j):no
operation.
(6) B =(N
6
, {ω
2
},ω
4
), λ = {open}, P
= {ω
2
,ω
4
},
scenario (f): nodes N
5
and N
7
are merged.
(7) B =(N
1
, {ω
2
},ω
4
), λ = {open}, P
= {ω
2
,ω
4
},
scenario (h): node N
6
is extended with index P
,
and a new bud (N
6
, {ω
2
,ω
4
},ω
3
) is created.
(8) B =(N
6
, {ω
2
,ω
4
},ω
3
), λ = {short, open},
P
= {ω
3
,ω
4
}.For = short, scenario (k): node
N
8
is generated by duplicate.For = open, sce-
nario (j): no operation.
(9) B =(N
0
, {ω
2
},ω
4
), λ = {open}, P
= {ω
2
,ω
4
},
and scenario (h): node N
2
is extended with index
P
, and a new bud (N
2
, {ω
2
,ω
4
},ω
3
) is created.
(10) B =(N
2
, {ω
2
,ω
4
},ω
3
), λ = {λ =
{short, open}, and P
= {ω
3
,ω
4
}.For = short,
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
54
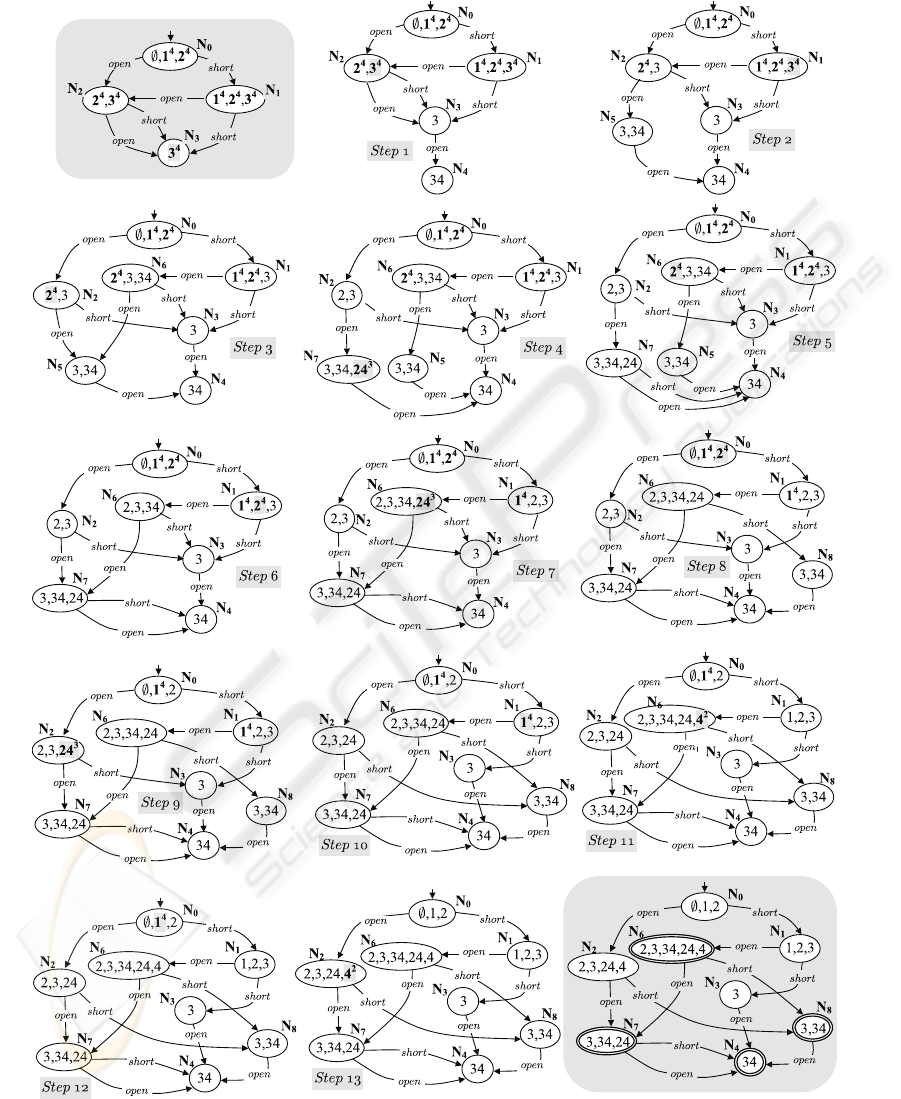
Figure 8: Tracing of the incremental computation of Isp(O
[4]
).
INCREMENTAL PROCESSING OF TEMPORAL OBSERVATIONS IN SUPERVISION AND DIAGNOSIS OF
DISCRETE-EVENT SYSTEMS
55

scenario (i): transition N
2
short
−−−→ N
3
is redirected
toward N
8
.For = open, scenario (j): no opera-
tion.
(11) B =(N
1
, {ω
1
},ω
4
), λ = {open}, P
= {ω
4
},
scenario (h): node N
6
is extended with P
and bud
(N
6
, {ω
4
},ω
2
) is created.
(12) B =(N
6
, {ω
4
},ω
2
), λ = {open,ε}, P
=
{ω
2
,ω
4
}.For = open, scenario (j): no opera-
tion. For = ε, scenario (b): no operation.
(13) B =(N
0
, {ω
1
},ω
4
), λ = {open}, P
= {ω
4
},
scenario (h): node N
2
is extended with index P
,
and a new bud (N
2
, {ω
4
},ω
2
) is created.
(14) B =(N
2
, {ω
4
},ω
2
), λ = {open,ε}, P
=
{ω
2
,ω
4
}.For = open, scenario (j): no opera-
tion. For = ε, scenario (b): no operation.
Since the bud set B is empty, the core section ends.
The termination section (Line 113) qualifies the final
states of Isp(O
[4]
), namely N
4
, N
6
, N
7
, and N
8
.As
expected, the last (shaded) graph in Fig. 8 represents
the same automaton Isp(O) in Fig. 4.
6 DISCUSSION
The technique for incremental construction of the in-
dex space is conceived in the context of dynamic
model-based diagnosis of DESs. In this realm, the
evolution of a system is monitored based on its model
and the observation it generates during operation. The
diagnostic engine is expected to react to each new
fragment of observation by generating a correspond-
ing set of candidate diagnoses based on the previous
behavior of the system and the new fragment. As
such, the diagnostic process is incremental in nature.
Model-based diagnosis of DESs is grounded on
two essential elements: the observation O and the
model M of the system. Roughly, the diagnostic en-
gine aims to explain O based on M. In so doing, a
subset of the behavior space of the system is deter-
mined and represented by a finite automaton, where
each path from the root to a final state is a candidate
history of the system. Even if the automaton is finite,
the number of candidate histories may be unbounded
because of possible cycles within the automaton.
Each history is a sequence of component transi-
tions, where each transition can be either normal or
faulty. Consequently, each history corresponds to a
candidate diagnosis, namely the set of faulty transi-
tions within the history. Despite the unboundedness
of candidate histories, the number of possible diag-
noses is finite, since the total number of faulty transi-
tions of components in the system is finite too. Pre-
cisely, if F is the domain of faulty transitions, the
domain of candidate diagnoses is the powerset 2
F
,
including the empty diagnosis ∅ denoting a normal
(rather than faulty) behavior. However, due to the
constraints imposed by M and O, the set of candidate
diagnoses is in general a small subset of 2
F
, possibly
a singleton.
Considering a diagnostic problem ℘(O, M), where
O = ϕ
1
,...,ϕ
n
is a temporal observation, we de-
fine the static solution of the problem, ∆(℘(O, M)),
the set of candidate diagnoses relevant to the histo-
ries drawn from O based on M. Since we are in-
terested in updating the set of candidate diagnoses at
each new fragment of observation, we have to con-
sider the sequence of static solutions relevant to each
sub-problem ℘(O
[i]
, M), i ∈ [0 .. n], where O
[i]
is the
sub-observation ϕ
1
,...,ϕ
i
up to the i-th fragment.
Note that, when i =0,wehaveanempty observation.
In other words, the diagnostic engine is expected
to generate a new static solution at the occurrence of
each newly-generated fragment of observation. This
is called the dynamic solution of ℘(O, M), namely
∆ = ∆(℘(O
[0]
, M)),...,∆(℘(O
[n]
, M)).
Another strong requirement for the diagnostic process
is that the model M of the system Σ is given only
intensionally, that is, in terms of the topology of Σ
(components and links among them) and the relevant
component models (communicating finite automata),
rather than extensionally, that is, in terms of the (pos-
sibly huge) automaton describing explicitly the sys-
tem behavior.
On the other hand, just as the observation graph
is not suitable for the diagnostic engine as is, and a
surrogate of it (the index space) is used instead, the
compositional model M turns to be inadequate as is,
and a surrogate of it is considered, namely the model
space of M, denoted Msp(M). Thus, for compu-
tational reasons, the diagnostic problem ℘(O, M) is
transformed by the diagnostic engine into a surro-
gate ℘(Isp(O), Msp(M)). As for the index space,
the model space is made up incrementally, following
a lazy evaluation approach: the model space is ex-
tended only when necessary for the diagnostic engine.
Essentially, a model space is a graph where nodes
correspond to possible system states, while edges are
marked by visible labels. Intuitively, a transition be-
tween nodes of the model space, N
−→ N
, occurs
when the new observation fragment involves label .
4
Both nodes and edges of the model space carry com-
piled diagnostic information: the dynamic solution
of the diagnostic problem can be generated based on
such information provided the index space is some-
how linked to the model space.
Specifically, each node of Isp(O) must be deco-
rated with the set of model-space states which comply
4
Roughly, according to lazy evaluation, the generation
of node N
is triggered by the occurrence of label .
ICEIS 2006 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
56
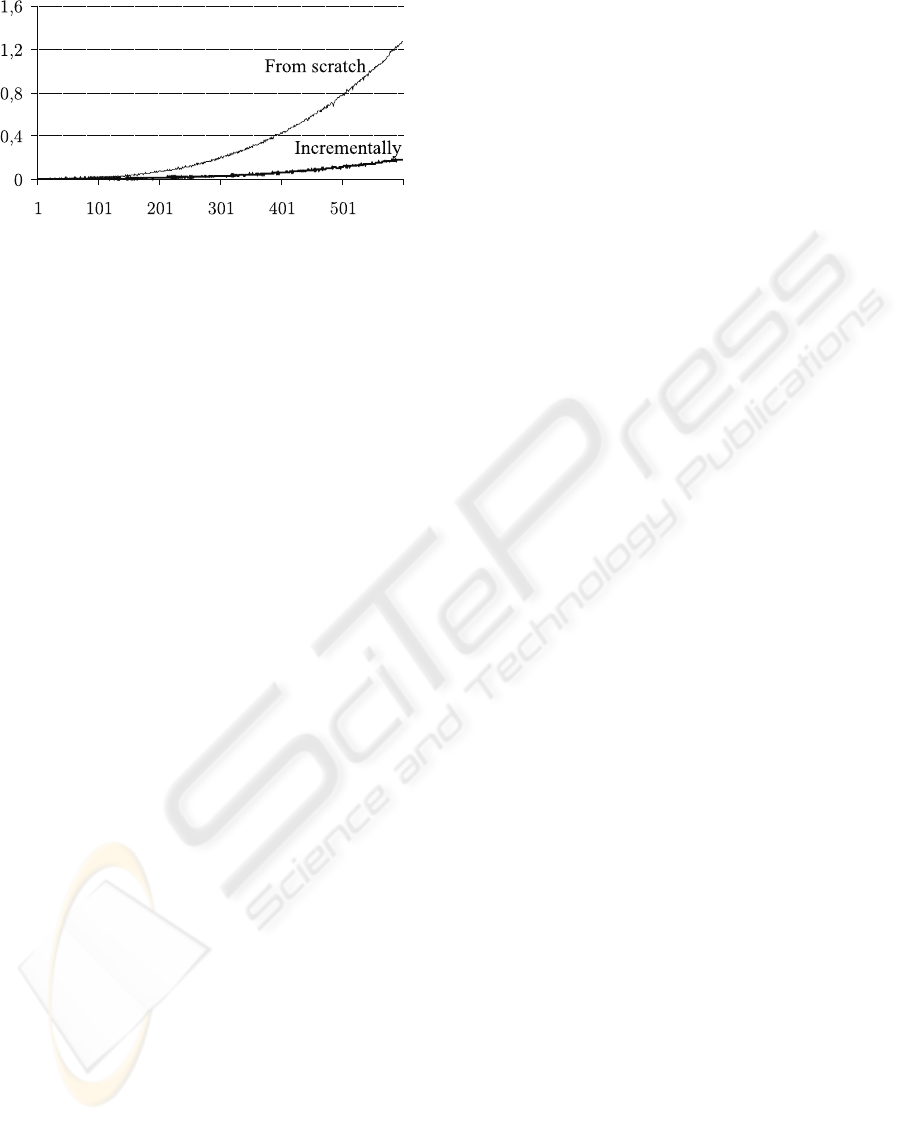
Figure 9: Experimental results: index-space computation-
time (y-axis) vs. number of observation fragments (x-axis).
with all the paths up to in Isp(O). Such a decora-
tion is grounded on the common alphabet of the reg-
ular language of Isp(O) and of Msp(M), namely the
domain of visible labels. For example, if
1
,...,
k
is a string of the language of Isp(O) ending at node
, and the same sequence of labels is also a string
of the language of Msp(M) ending at node N , then
the decoration of will include N. Since several dif-
ferent strings may end at , the decoration of will
include several nodes of Msp(M). Accordingly, the
Increment algorithm has been extended to cope with
decorated index spaces too.
7 CONCLUSION
Both the observation graph and the index space are
modeling primitives for representing temporal obser-
vations. Whereas the observation graph is the front-
end representation, suitable for modeling an observa-
tion while it is being received over a time interval, the
index space is a back-end representation, suitable for
model-based problem-solving and as a standard inter-
change format of uncertain observations among dis-
tinct application contexts. This paper has presented a
technique for constructing the index space incremen-
tally, while receiving observation fragments one at a
time. This is significant whenever a nonmonotonic
processing step has to be performed after each ob-
servation fragment is received, as is when the tasks
of supervision and dynamic diagnosis (and state es-
timation, in general), are considered. The Increment
algorithm is an attempt to achieve the stated goals.
Experimental results, shown in Fig. 9, indicate that
the algorithm (implemented in C language) is sound,
complete, and efficient. The diagram shows the time
(in seconds) to compute the index space of an obser-
vation composed of (up to) 600 fragments. The curve
on the top is relevant to the computation of each index
space from scratch. The curve on the bottom corre-
sponds to the incremental computation. The research
still needs to perform computational analysis, and to
gather further experimental results based on observa-
tions with different sizes and uncertainty degrees.
REFERENCES
Aho, A., Sethi, R., and Ullman, J. (1986). Compilers –
Principles, Techniques, and Tools. Addison-Wesley,
Reading, MA.
Baroni, P., Canzi, U., and Guida, G. (1997). Fault diag-
nosis through history reconstruction: an application
to power transmission networks. Expert Systems with
Applications, 12(1):37–52.
Baroni, P., Lamperti, G., Pogliano, P., and Zanella, M.
(1999). Diagnosis of large active systems. Artificial
Intelligence, 110(1):135–183.
Brusoni, V., Console, L., Terenziani, P., and Dupr
´
e, D. T.
(1998). A spectrum of definitions for temporal model-
based diagnosis. Artificial Intelligence, 102(1):39–80.
K
¨
ob, D. and Wotawa, F. (2004). Introducing alias infor-
mation into model-based debugging. In Fifteenth In-
ternational Workshop on Principles of Diagnosis –
DX’04, pages 93–98, Carcassonne, F.
Lamperti, G. and Zanella, M. (2000). Uncertain tempo-
ral observations in diagnosis. In Fourteenth European
Conference on Artificial Intelligence – ECAI’2000,
pages 151–155, Berlin, D.
Lamperti, G. and Zanella, M. (2002). Diagnosis of discrete-
event systems from uncertain temporal observations.
Artificial Intelligence, 137(1–2):91–163.
Lamperti, G. and Zanella, M. (2003). Diagnosis of Active
Systems – Principles and Techniques, volume 741 of
The Kluwer International Series in Engineering and
Computer Science. Kluwer Academic Publisher, Dor-
drecht, NL.
Lamperti, G. and Zanella, M. (2004a). A bridged diagnostic
method for the monitoring of polymorphic discrete-
event systems. IEEE Transactions on Systems, Man,
and Cybernetics – Part B: Cybernetics, 34(5):2222–
2244.
Lamperti, G. and Zanella, M. (2004b). Dynamic diagno-
sis of active systems with fragmented observations.
In Sixth International Conference on Enterprise Infor-
mation Systems – ICEIS’2004, pages 249–261, Porto,
P.
Mozeti
ˇ
c, I. (1991). Hierarchical model-based diagno-
sis. International Journal of Man-Machine Studies,
35(3):329–362.
Roz
´
e, L. (1997). Supervision of telecommunication net-
work: a diagnoser approach. In Eighth International
Workshop on Principles of Diagnosis – DX’97, pages
103–111, Mont St. Michel, F.
Wotawa, F. (202). On the relationship between model-based
debugging and program slicing. Artificial Intelligence,
135(1–2):125–143.
INCREMENTAL PROCESSING OF TEMPORAL OBSERVATIONS IN SUPERVISION AND DIAGNOSIS OF
DISCRETE-EVENT SYSTEMS
57
