
BDI AGENTS WITH FUZZY ASSOCIATIVE MEMORY FOR
VESSEL BERTHING IN CONTAINER PORTS
Prasanna Lokuge, Damminda Alahakoon
School of Business Systems, Monash University, Australia
Parakrama Dissanayake
Chairman, Sri Lanka Ports Authority, Sri Lanka,
Keywords Intelligent Agents, BDI, Beliefs, Desires, Intentions, Plans, Fuzzy associative memory, container
ports, shipping industry.
Abstract: Faster turnaround time of the vessels in berths has direct impact on the improvement of terminals
productivity. The need for an intelligent system that dynamically adapts to the changing environment is
apparent, as there is limited number of berths and resources available in container terminals for delivering
services to vessels. BDI (Beliefs, Desires and Intentions) agents are being proposed in a complex
collaborative environment in the vessel scheduling assuring better management and control in the terminal.
BDI agents to deal with many criteria and different goals with uncertain beliefs, it is proposed that fuzzy
associative memory to use in the planning process of the BDI architecture facilitating better decision
making in the whole process. In this paper we propose hybrid BDI architecture with fuzzy associative
memory in handling uncertainty issues of the vessel berthing in container terminals. Execution of Plans in a
collaborative multi agent environment would be strengthened with the introduction of fuzzy associative
memory in BDI agents.
1 INTRODUCTION
Berthing system of a container terminal requires to
determine expected berthing time (ETB), expected
completion time (ECT) of the vessels, a birth,
allocation of cranes, labour, trucks for the
stevedoring (loading and discharging) of containers
assuring maximum utilization of resources and
finally guaranteeing the high productivity of the
terminal.
Agent oriented systems are based on practical
reasoning system, which perhaps use philosophical
model of human reasoning have been used in
achieving optimal solutions for many business
application in the recent past. A number of different
approaches have emerged as candidates for the study
of agent-oriented systems [Bratman et al., 1988;
Doyle 1992; Rao and Georgeff, 1991c; Rosenschein
and Kaelbling, 1968; Shoham 1993]. The
architecture (Winikoff, 2001) has been implemented
and demonstrated the usability in number of
business systems.
BDI agent model is probably the most mature of the
intelligent agent models and has been adopted by a
few industrial applications. Berthing system in
container ports will have to satisfy various
constraints to a certain degree in making rational
decisions. In the work described, multi agent
systems model in container terminals have been
extended with the fuzzy associative memory which
greatly useful in handling uncertainty and vagueness
in the scheduling of vessels. In this paper, we
describe Hybrid BDI agent architecture coupled with
fuzzy associative memory in berth scheduling for
vessels in a container terminal.
The research is carried out at the School of
Business Systems, Monash University, Australia, in
collaboration with the Jaya Container Terminal at
the port of Colombo, Sri Lanka. The rest of the
paper is organized as follows: Section 2 provides an
introduction to berthing system in container
terminals. Section 3 describes the background of the
BDI agent model. Section 4 describes the proposed
hybrid BDI architecture for the agents in a container
terminal. Section 5 describes the schedule agent.
315
Lokuge P., Alahakoon D. and Dissanayake P. (2004).
BDI AGENTS WITH FUZZY ASSOCIATIVE MEMORY FOR VESSEL BERTHING IN CONTAINER PORTS.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 315-320
DOI: 10.5220/0002617403150320
Copyright
c
SciTePress

Section 6 describes a test case scenario. Future work
and conclusions are provided in Section 7.
2 VESSEL BERTHING SYSTEM IN
A CONTAINER TERMINAL
In current operations, shipping line will inform the
respective port the Expected Time of Arrival (ETA)
three months before the arrival of the ship.
Use of conventional software techniques to solve
this type of problems would cost very much for the
implementation and difficult to do so as intelligence
is required in managing the dynamic behavior of
such systems. Berthing system of a container
terminal is responsible for computing Expected time
of berth(ETB), Expected time of completion (ETC),
Expected sailing time (EST), allocation of a berth,
allocation of resources such as Cranes, Trucks, labor
etc.
3 BDI AGENTS
In the AI community the beliefs-desires-intention
(BDI) model has become to be possibly the best-
known and best-studied model(Georgeff, 1998) of
practical reasoning agents. Beliefs mean the
information about environment and can be modelled
as database records. Desires are the objectives to be
achieved by the agents. These may have different
parameters to set the priority of achieving the
objectives of the agent. Intentions are the current
selected plans for the execution Plans are used to
achieve future desires or states in the problem
domain. Agent considers many options in finally
achieving the goal set for the problem domain.
The first point to note regarding the execution
cycle given below will not observe dynamically
changing world during the execution of first set of
plans. In our Proposed hybrid BDI model for the
vessel berthing, different levels of plans are being
identified in achieving the final goals. BDI
execution cycle is given below:
Initialise-state ();
Repeat
Options:=option-generated(event-queue);
Selected-options:=deliberate(options);
Update-intentions (selected-options);
Execute ();
Get-new-external-events ();
Drop-successful-attitudes ();
Drop-impossible-attitudes ();
End repeat
4 HYBRID BDI AGENTS
Tasks involving in berths, vessels and scheduling are
being proposed to handle by three different types of
agents namely, VESSEL-AGENT(VA),
SCHEDULING-AGENT(SA) and BERTH-
AGENT(BA). Each agent handles the set of tasks
depending upon the knowledge they have and
essentially communicate and co-operate with other
agents in attaining the final desires of the system.
VA is primarily responsible for informing the vessel
details to other agents. SA schedules the vessels and
BA is responsible in assuring faster turnaround of
vessels. Main agents in the system are shown in
figure 1.
Basic control loop of the BDI is refined in
facilitating agents to capture the vessel berthing
environmental changes and allow replanning
(Wooldridge, 2000) during various stages. Refined
BDI execution cycle is shown below:
B :=
B
init
; /* initial beliefs*/
I := I
init
; /* initial intentions */
While True do
get next percept p;
B := Update(B
old
,p); /* update beliefs */
D := deliberate- options(B,I);
I := filter-options(B,D,I);
π
:= plan(B,I) /* choose plans */
while not empty (
π
) do
α
:= head(
π
); /* initial set of plans*/
execute(
α
);
π
:= tail(
π
); /* next set of plans */
get next percept p; /* observe beliefs */
B := Update(B
old
,p); /* update beliefs */
If not sound(
π
, I, B) then
π
:= plan(B,I); /* allow replan */
end-if
end-while
end-while
Where, B indicates the beliefs and B
old
means earlier
beliefs, D for desires and I for intentions. A percept
p is an input from the environment. Set of of
possible desires for the current beliefs and intentions
are being selected from the deliberate-option ( )
function. Then agent chooses between competing
alternatives, and commits to achieve them is given in
function filter-options( ) function. These chosen
options then become intentions I. Function sound(
π
, I, B ) allows agent to determine whether its earlier
plan is still appropriate in order to achieve the
current intention, if not, then it engages in further
reasoning to find an alternative plan. This implies
some (Wooldridge, 2000) degree of reactivity.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
316

Use of fuzzy associative memory in the BDI agent
model is described in the next section.
4.1 Fuzzy Associative Memory
Vessel scheduling in a container terminal is very
complex. This is mainly because, there are several
tasks to be executed together, uncertainty and
vagueness of the data, objectives are prioritised,
some objectives are partially satisfied etc. As with
many real life decision-making situations, it is
usually not possible to fulfil all objectives perfectly
when building berth schedules. Fuzzy associative
memory used in the BDI model essentially helps to
minimize the above constraint in vessel scheduling.
Consider the classical set A of the universe U. A
fuzzy set A is defined by a set or ordered pairs, a
binary relation,
A = {(x, µ
A
(x) ) | x
∈
A, µ
A
(x) ∈ [0,1]}, (1)
Where µ
A
(x) is a function called membership
function; µ
A
(x) specifies the grade or degree to
which element x in A belongs to the fuzzy set A.
Definition (1) associates with each element x in A a
real number µ
A
(x) in the interval [0,1] which is
assigned to x. Large values of µ
A
(x) indicate higher
degree of membership. A fuzzy rule can be defined
as a conditional statement in the form :
R1 : IF x is A
AND y is B
THEN z is C;
where x, y, z are linguistic variables; and A,B,C are
linguistic values determined by fuzzy sets on the
universe of discourses X and Y, respectively.
The proposed agent model use Mamdani fuzzy
associative memory in the schedule-agent (BDI) of
container terminal is described in the following
section.
5 THE SCHEDULE AGENT
Vessel scheduling tasks are being carried out by the
various components in the schedule-agent(SA).
Steps shown in the refined BDI execution cycle is
being followed by the agent, further SA uses fuzzy
associative memory when there are instances of data
uncertainty. The main components of the
SCHEDULE-AGENT are EVENT-HANDLER,
PLAN-SELECTOR, PLAN-MONITOR, STATIC-
FILTER, IMPACT-ANALYZER, NEGOTIATOR
and BERTH-ASSIGNER. The different components
and the proposed Neuro-BDI architecture for
SCHEDULE AGENT are shown in Figure 2.
Events are extracted from percept in EVENT-
HANDLER component and subsequently agent’s
beliefs are updated. VA may send ETA, NOB, and
LEN etc of a new vessel to SA. This triggers SA to
compute ETB for the new vessel.
Deliberation process in the PLAN-SELECTOR
component chooses intentions in achieving a desire.
Set of plans is then identified by the PLAN-
SELECTOR for execution. For e.g. SA may have
plans to check the berthing/sailing draft
requirements, and crane outreach requirements of
the berths.
PLAN-MONITOR component monitors the
execution of committed plans by the agent. if
PLAN-MONITOR ever determines that its next
level plan is no longer appropriate in order to
achieve the current intentions, then it finds an
alternative plan.
STATIC-FILTER will execute the initial set of
plans in finding out the suitable berths. IMPACT-
ANALYZER uses fuzzy associative memory in
Vessel Agents
Schedule details
Expected arrival
Request for bids/
Berth productivity
Berth Agents
Schedule Agent
Figure 1: Main Agents in the proposed vessel berthing system
BDI AGENTS WITH FUZZY ASSOCIATIVE MEMORY FOR VESSEL BERTHING IN CONTAINER PORTS
317

selecting the most efficient berth from the earlier
selected berths for the cargo operations of the new
vessel. Negotiations required to improve the berth
productivity given by BA’s will be handled by the
NEGOTIATOR component. Final berth schedule
indicating the ETB for new vessels is being assigned
by the BERTH-ASSIGNER component in the SA.
Next section describes the use of fuzzy associative
memory in IMPACT-ANALYSER component for
the selection of a suitable berth for the new vessel.
6 THE IMPACT ANALYSER
COMPONENT WITH FUZZY
ASSOCIATIVE MEMORY
The primary objective of the IMPACT-ANALYSER
is to find out a berth, which can commit the highest
productivity in serving the new vessel. Firstly, BA
requests to send the average berth productivity
(GBP
i
) that individual berths can commit for the
cargo operation of the new vessel. GBP of a berth i
is given as,
GBP
i
=
∑
=
N
N
GCP
1
i
Where, N is number of cranes used in the berth and
the gross crane productivity(GCP
i
) indicates the
number of moves per hour by crane i.
Operational delays (ODL
i
) in various berths are
considered at this point as it has a direct impact on
the completion of cargo operations in a berth.
Number of trucks (NOT
i
vessel
) that can be assigned
for the loading and discharge of the boxes in each
berth is also considered at this point by the SA. The
above fuzzy input parameters GBP
i
, ODL
i
and
NOT
vessel
are considered in computing the expected
vessel productivity (EVP
i
vessel
) of the new vessel.
Time required for the completion of cargo
operations (EOT
i
vessel
) of a new vessel in berth i is
then calculated.
Impact-analyser component uses three linguistic
input variables GBP
i
, NOT
vessel
and ODL
i
to
compute expected vessel productivity in berth i for
the new vessel, EVP
i
vessel
. The ranges of the
linguistic variables are defined and triangle and
trapezoid shapes are used to represent the fuzzy sets
in the proposed system. Mamdani fuzzy inference
system used by the IMPACT-ANALYSER
component is shown in Figure 3.
Linguistic values for the variables and their
notations used are described below:
GBP
i
= {Very-Low, Low, Rather-Low, Average,
Rather good, Good, Very Good}
NOT
vessel
= {Very-Few, Few, Rather-Few,
Average, Rather-Large, Large, Very-
Large}
ODL
i
= {Small, Average, Big}
Linguistic values identified for the output variable
EVP
i
vessel
in the fuzzy associative memory are as
follows:
EVP
i
vessel
= {Very-Low, Low, Rather Low,
Average, Rather-High, High, Very-High}
The knowledge based was implemented with 147
fuzzy rules. Linguistic variables and their ranges
used in the fuzzy associative memory are shown in
the following tables.
Table 1: Linguistic Variable: GBP
i
Value Notation Range
Very Low VL [0 –20]
Low L [15-35]
Rather-Low RL [28-45]
Average A [38-50]
Rather-Good RG [40-60]
Good G [55-85]
Very good VG [75-115]
N
1
Figure 2: Components of the Schedule-agent
Percept
Percept
Impact-analyser (Fuzzy system)
Static-filter
Event-handler Plan-selector Plan-monitor Negotiator Berth-assigner
Control Flow
Feedback Flow
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
318
Table 2: Linguistic Variable: NOT
vessel
Value Notation Range
Very-Few VF [0 –3]
Few F [2-5]
Rather-Few RF [3-6]
Average A [4-7]
Rather-Large RL [6-9]
Large L [8-12]
Very Large VL [11-15]
Table 3: Linguistic Variable: ODL
i
Value Notation Range
Small S [0-5]
Average A [3-8]
Big B [7-15]
Table 4:
Linguistic Variable: EVP
i
vessel
Value Notation Range
Very-Low VL [0-15]
Low L [12-30]
Rather-Lowl RL [25-40]
Average A [35-50]
Rather-High RH [42-65
High H [56-90]
Very-High VH [72-110]
A sample test case scenario in a container terminal is
described in the next section.
6 A TEST CASE FOR VESSEL
BERTHING
A berthing situation at Jaya container terminal
(JCT), port of Colombo has been simulated with
BDI agents and fuzzy associative memory in BA.
JCT has four main berths: JCT1, JCT2, JCT3 and,
JCT4. Table 5 shows the berth occupancies at a
given point of time in JCT.
Table 5: Berth Occupancy in JCT
Vessels at the Terminal, time T
i
Beliefs Maersk ZIM APL United_V
NOB 550 525 750 490
VCR 13m 13m 18m 13m
Berth JCT1 JCT2 JCT3 JCT4
COR 13m 18m 18m 18m
ETC Sat1220 Sat0300 Sat0435 Sat0500
Declaration of a new vessel ZIM-JAPAN (ZIMJ) has
been sent by VA for scheduling. Declaration of
vessel ZIMJ minimally contains: ETA
zimj
= Sat0315,
NOB
zimj
= 1650, VCR
zimj
= 18m, etc.
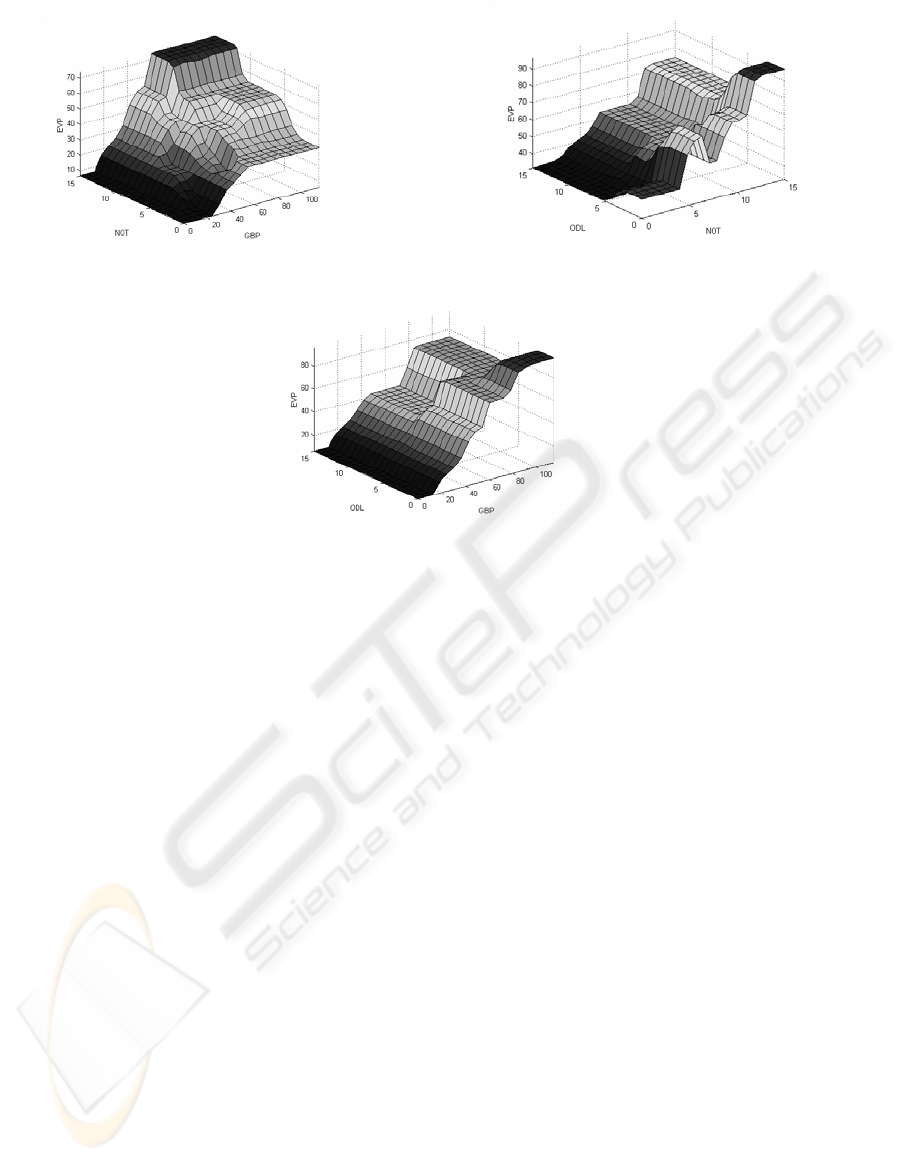
Table 6 shows the inputs and final output of
expected vessel productivity (EVP
i
vessel
) of
individual berths. IMPACT-ANALYSER of the
SA will use the fuzzy based expert knowledge in
computing the EVP
i
vessel
of individual berths. Figure
4a, 4b and 4c show the decision surfaces produced
for the rule base learnt by the agent.
Table 6: Sample inputs and output value
GBP ODL NOT EVP
vessel
JCT2 62 5 4 37.7
JCT3 80 6 5 48.3
JCT4 99 5 3 64
Outputs of the EVP
i
vessel
received from the Fuzzy
inference system will be used to compute the
expected time required for the completion of cargo
operations (EOT
i
vessel
) of the new vessel ZIMJ in the
above berths. Following equation is used to compute
the EOT
i
vessel
.
EOT
i
vessel
=
With above information, BERTH-ASSIGNER will
assign a berth, which indicates the minimum EOT
for the new vessel.
7 CONCLUSIONS AND FUTURE
WORK
Paper discussed the use of BDI agents in a complex
multi agent environment in the shipping industry.
Main BDI execution cycle is refined enabling agents
to replan or to select alternative plans in achieving
its original desires or intentions. This would
essentially enhance the agent’s ability in assigning
berths for vessels in container terminals
Paper also outlined the use of fuzzy associative
memory in BDI agents, especially in dealing with
vague and uncertainty situations in the planning
stage of the vessel berthing system.
We plan to extend the research work to
incorporate fuzzy expert knowledge into the BDI
architecture, which would provide necessary
infrastructure for BDI agents to reconsider its
intentions dynamically.
NOB
vessel
EVP
i
vessel
BDI AGENTS WITH FUZZY ASSOCIATIVE MEMORY FOR VESSEL BERTHING IN CONTAINER PORTS
319
REFERENCES
Rao A.S and M. Georgeff., 1995. BDI agents: from theory
to practice. In proceedings of the first international
conference on Multi agents systems (ICMAS-95).
Rao A.S and M.P. Georgeff., 1995. BDI agents: From
Theory to Practice. Technical note 56..
Paolo Busetta P and Ramamohanarao K., 1997. Technical
Report 97/16, The University of Melbourne,
Department of Computer Science, Melbourne,
Australia.
Paolo Busetta P and Ramamohanarao K., 1997. Technical
Report 97/16, The University of Melbourne,
Department of Computer Science, Melbourne,
Australia.
Busetta P and Kotagiri R. An Architecture for Mobile BDI
Agents. Technical Report 97/16, The University of
Melbourne, Department of Computer Science,
Melbourne,Australia.
http://citeseer.nj.nec.com/article/busetta97architectur
e.html
Ljungberg M and Lucas A., 1992. The OASIS Air traffic
management system. proceeding of the second pacific
rim international conference on artificial intelligent,
PRICAI,Seoul Korea.
Georgeff M, Pell B,Pollack M,Tambe M and. Wooldridge,
M., 1998. The Belief-Desire-Intention Model of
Agency,SpringerPublishers,
http://citeseer.nj.nec.com/georgeff99beliefdesireintenti
on.html
Winikoff M , Padgham, and Harland J., 2001.
Simplifying the development of intelligent agents. In
Proceedings of the 14
th
Australian Joint Conference
on Artificial Intelligence (AI’01)
Jorg P. Muller., 1996. The Design of Intelligent Agents, A
Layered Approach, Springer-Verlag Berlin
Heidelberg, New York.
Nicholas R. Jennings., 1999. Intelligent Agents VI,
,Agent Theories Architecture, and Languages, 6
th
International workshop proceedings.Florida.
George B and Bojadziev M., 1995. Fuzzy sets, fuzzy logic,
applications, World Scientific publishing Co Pte Ltd,
Singapore.
Baldwin J.F., 1996. Fuzzy Logic, John Wiley & sons Ltd,
England.
Philip D. Wasserman., 1989. Neural Computing, theory
and Practice, Van Nostrand Reinhold, New York.
Eberhart R.C and Dobbins R.W., 1990. Neural Network
PC Tools, Academic Press Inc, ,New York.
Lin T.C and Lee C.S.G., 1996. Neural Fuzzy Systems,
Prentice Hall P T R, Upper Saddle River, New Jersey.
Brazier F., Dunin-Keplicz B., Verbrugge R., 1997.
Modelling Internal Dynamic Behaviour of BDI
Agents. Proceedings of the Third International
Workshop on Formal Models of Agents, MODELAGE
http://citeseer.nj.nec.com/brazier97modelling.html
Ardissono L, Boella G, and Lesmo L.,1997. A plan-
based formalism to express knowledge about actions.
In Proc. 4th ModelAge Workshop: Formal Models of
Agents, pages 255--268, Pontignano, Italy.
Figure 4a: Decision surface for GBP and
NOT
Figure 4b: Decision surface for NOT and
ODL
Figure 4c: Decision surface for GBP and ODL
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
320
