
MULTI-AGENT APPROACH BASED ON TABU SEARCH FOR
THE FLEXIBLE JOB SHOP SCHEDULING PROBLEM
Meriem Ennigrou
1
and Khaled Ghédira
2
1 ur. SOI²E, Stratégies d'Optimisation de l'Ingénierie des Informations et de la connaissancE
IPEIM, Institut Préparatoire aux Etudes d'Ingénieurs – ElManar, 2092 El Manar 2 BP 244, Tunisie
2 ur. SOI²E, Stratégies d'Optimisation de l'Ingénierie des Informations et de la connaissancE
ENSI, Ecole Nationale des Sciences de l'Informatique, 2010 Campus Universitaire la manouba, Tunisie
Keywords: Multi-Agent System, flexible Job Shop, Scheduling, Tabu Search
Abstract: This paper proposes a Multi-agent approach based on a tabu search method for solving the flexible Job Shop
scheduling problem. The characteristic of the latter problem is that one or several machines can process one
operation so that its processing time depends on the machine used. Such a generalization of the classical
problem makes it more and more difficult to solve. The objective is to minimize the makespan or the total
duration of the schedule. The proposed model is composed of three classes of agents: Job agents and
Resource agents which are responsible for the satisfaction of the constraints under their jurisdiction, and an
Interface agent containing the tabu search core. Different experimentations have been performed on
different benchmarks and results have been presented.
1 INTRODUCTION
Scheduling problems arise in several economic
fields and thereby play an important role in
production management. A scheduling problem
consists in allocating a set of jobs to a finite set of
resources over time while satisfying a set of
constraints.
Among the most difficult scheduling problems,
we find the Job Shop Scheduling Problem. Solving it
optimally seems to be very hard, in the majority of
cases, because of its high complexity. In fact, this
problem falls into the category of NP-hard problems
for which exact solving methods are inappropriate
since they explode with problem size. However,
approximate methods are more suitable for such
problems. The latter are based on local search
techniques such as tabu search or simulated
annealing or on evolutive techniques such as genetic
algorithms and ant systems.
In this paper we present a Multi-Agent model
based on the tabu search technique for solving the
flexible job shop scheduling problem. The latter
represents a generalisation of the classical problem
and is consequently more difficult to solve.
The paper is organised as follows: section 2
defines the problem subject of our research, the
following one presents the tabu search method on
which is based our model. Then, we describe the
Multi-Agent model proposed, its agents and its
global dynamic. Next, we present an illustrative
example. Finally, we give some experimental
results.
2 THE FLEXIBLE JOB SHOP
PROBLEM
A Job shop Scheduling problem consists in
performing a set of n jobs {J
1
, …, J
n
} on a set of m
resources {R
1
, …, R
m
}. Each job J
i
, i=1,…,n, is
composed of n
i
operations that must be performed
on the different resources according to a predefined
order, known as the job process routing. This one
characterizes the precedence constraints existing
between the operations of one job. In addition, each
operation has a processing time known in advance
and can be processed by only one resource.
Furthermore, each job has to be achieved in a
temporal range defined by its release date, before
which the job cannot be started, and its due date,
before which the job must be completed. This
temporal range defines the temporal constraints of
22
Ennigrou M. and Ghédira K. (2004).
MULTI-AGENT APPROACH BASED ON TABU SEARCH FOR THE FLEXIBLE JOB SHOP SCHEDULING PROBLEM.
In Proceedings of the Sixth International Conference on Enterprise Information Systems, pages 22-28
DOI: 10.5220/0002610000220028
Copyright
c
SciTePress

that job. Moreover, a resource can perform only one
operation at a time which correspond to the
disjunctive constraints, and an operation cannot be
interrupted unless it is finished, i.e. no pre-emption
is allowed. A solution for the job shop problem
consists in fixing a start time for each operation
satisfying the set of constraints.
The Flexible Job Shop Problem, first introduced
by Nuijten & Aarts (1996), is a generalisation of the
above mentioned problem, where each operation can
be processed by more than one resource and has
consequently a processing time depending on the
resource used. A solution consists then not only in
sequencing the operations on the resources and
fixing them a start time but also in allocating them to
a resource likely to achieve them. This problem is
also NP-hard.
Some approaches have been proposed for solving
it, they are based on the tabu search method. Among
them, the approach proposed by Mastrollili et
Gambrella (2000), Brucker & Neyer (1998),
Chambers & Barnes (1996).
3 TABU SEARCH
The model we propose in this article is based on the
tabu search method, Glover (1986), which is a meta-
heuristic based on the local search principle. The
latter consists in exploring the search space
composed of the set of solutions in order to find the
optimal one. More precisely, beginning from an
initial solution, it consists to choose, at each
iteration, the best solution in the current solution
neighbourhood, even if it does not improve the
quality of the solution. A neighbourhood is
composed of all the solutions obtained by a simple
move on the current solution. These solutions are
named, then, neighbours of the current solution.
In order to escape local optima in which the
system can be easily trapped, tabu search uses a
temporary memorisation structure in which it keeps
track of the last visited solutions: the tabu list. In
fact, a solution is forbidden during a number of
iterations equal to the tabu list size. Then, the best
solution among the ones not forbidden is selected for
the next iteration.
Although its efficiency in solving many difficult
problems, tabu search remains yet hardly adaptable
to flexible job shop problem because of the great
number of parameters to define:
– initial solution,
– neighbourhood function,
– evaluation of the current solution,
– tabu list size,…
In the following section, we describe briefly our
adaptation of the different parameters to the flexible
job shop. Subsequently, we present our multi-agent
model and its global dynamic.
3.1 Neighbourhood function
A tabu search based approach complexity depends
essentially on (1) the current solution neighbourhood
size and on (2) the evaluation scheme of this
neighbourhood with which the best solution will be
determined. Eikelder et al. (1997) have shown that
almost 90% of the solving time is consumed by
neighbourhood evaluation. Consequently, it seems
interesting to reduce the size of the neighbourhood
in order to reduce problem complexity.
To present our neighbourhood function, we need
first define the notion of critical path. A critical path
of a solution is the path which length is equal to the
schedule one and that is composed of operations
related to by either:
– a precedence constraint, or
– a disjunctive constraint (operations that can
be performed by the same resource)
A critical operation is an operation which
belongs to a critical path. the neighbourhood of a
solution is obtained by two types of moves:
1. Switch of two adjacent critical operations
achieved by the same resource.
2. Migration of a critical operation on another
potential resource.
3.2 Neighbourhood evaluation
The best non tabu neighbour belonging to the
current solution neighbourhood will be selected for
the next iteration. Hence, all neighbours must be
evaluated in order to determine the best one.
However, a global evaluation, i.e. computation of all
the start times of all the operations, of each
neighbour will need a considerable time. For this
reason, only a subset of operations will be taken into
account and to which start times will be redefined.
These operations are effectively concerned by the
move executed.
In the following, we define this sub-set of
operations in both cases of switch of two critical
operations and in the swap of a critical path on
another potential resource. We denote JS(O
i
) the
next operation of O
i
according to the process routing
of the job of O
i
. Similarly, we name MS(O
i
) the next
operation of O
i
performed on the same resource as
O
i
.
MULTI-AGENT APPROACH BASED ON TABU SEARCH FOR THE FLEXIBLE JOB SHOP SCHEDULING
PROBLEM
23

3.2.1 Switch of two critical operations
Let O
i
and O
j
be two critical operations performed
by resource R
k
. The only operations concerned
eventually after a switch are the following:
– JS(O
i
), JS(JS(O
i
)), ..., JS(O
j
), JS(JS(O
j
)), ...
– MS(O
i
), MS(MS(O
i
)), ...,MS(O
j
), MS(MS(O
j
)),
...
– MS(JS(O
i
)), MS(MS(JS(O
i
))), …,MS(JS(O
j
)),
MS(MS(JS(O
j
))), ...
– JS(MS(O
i
)), JS(JS(MS(O
i
))), ..., JS(MS(O
j
)),
JS(JS(MS(O
j
))), …
3.2.2 Swap of an operation
Let O
i
be a critical operation affected to a resource
R
k
and to replace on resource R
l
at date d. Let O
x
be
the operation executed by R
l
at date d. The
operations which likely to be modified are the
following:
– JS(O
i
), JS(JS(O
i
)), ...
– MS(O
i
), MS(MS(O
i
)), ...
– MS(JS(O
i
)), MS(MS(JS(O
i
))), ...
– JS(MS(O
i
)), JS(JS(MS(O
i
))), ...
– O
x
, JS(O
x
), JS(JS(O
x
)), ...,
– MS(JS(O
x
)), MS(JS(JS(O
x
))), ...
3.3 Initial solution
It has been shown that the efficiency of the
approaches based on local search depends closely on
the quality of the initial solution (Jain et al. 2000). In
our approach, the initial solution is determined by
the collaboration of the agent society. In the
following section, we present the Multi-Agent model
and its dynamic for determining the initial solution
and the optimal solution based on tabu search above-
mentioned.
4 MULTI-AGENT MODEL
According to Flexible Job Shop Problem definition,
we pick out two sorts of constraints: the ones
concerning the jobs, namely precedence and
temporal constraints, and those concerning the
resources, namely disjunctive constraints.
Consequently, the Multi-Agent model proposed is
composed of two agent classes: Job Agents and
Resource Agents responsible of the satisfaction of
the two classes of constraints. In addition, a third
agent class, containing a single agent, the Interface
agent, is added to our model. The latter contains the
core of the solving process, i.e. the tabu search
method. Moreover, it plays the role of the interface
between the agents and the user.
Each agent in this model has its own
acquaintances (the agents that it knows and with
which it can communicate), a local memory
composed of its static and dynamic knowledge and a
mailbox in which it stores the messages received
from the other agents. In the remaining of this
section we will describe each type of agent.
4.1 Job Agent
The acquaintances of Job agent are composed of
Resource agents that are likely to fulfil its operations
and of the Interface agent. Its static knowledge
includes its release and due dates, its process routing
and the different processing times of its operations
according to the resources. Whereas its dynamic
knowledge comprises the start times of its operations
and the current resources to which they are
allocated.
The Job agent is satisfied when all its operations
have been affected to potential resources and when
all its constraints are not violated, and in this case it
does nothing. Otherwise, it is unsatisfied and it tries
to assign an operation to an eligible resource in
cooperation with its acquaintances.
4.2 Resource Agent
The acquaintances of Resource agent are composed
of all Job agents whose operations are likely to be
fulfilled by it and of the Interface agent. Its static
knowledge encloses the list of operations that it can
perform along with their processing times. While its
dynamic knowledge is composed of the operations
currently assigned to it and their start times.
The Resource agent is satisfied when no
overlapping conflict exists between two operations
assigned to it and in this case it does nothing. If not,
it is unsatisfied and it tries to solve these conflicts by
sending one of the conflicting operation to its Job
agent in order to replace it elsewhere.
4.3 Interface Agent
The Interface agent acquaintances are composed of
all the agents existing in the system. Its static
knowledge contains:
– The maximal number of iterations allowed
Its dynamic knowledge is composed of
– The tabu list
– The current solution and its makespan
– The best solution encountered so far and its
makespan
– The current number of iterations performed.
As mentioned before, the Interface agent
contains the core of our solving process. The
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
24
Interface agent remains unsatisfied until the current
number of iterations exceeds a predefined threshold.
Otherwise, it delivers the best solution to the user.
In the remaining of this paper, we present the Multi-
Agent global dynamic in the two cases of initial
solution and optimal solution determination.
5 MULTI-AGENT GLOBAL
DYNAMIC
In this section we describe the global dynamic of the
Multi-Agent system proposed for the flexible job
shop problem. Two main phases compose this global
dynamic: initial solution determination phase and
optimisation phase by tabu search.
5.1 Initial solution determination
phase
The initial solution is the result of agent cooperation.
Initially, the Interface agent creates the different Job
and Resource agents and sends the message
"Determine_Initial_Allocation(J
k
)" to Job agents in
order to find an initial allocation for all their
operations. The job agent selects, consequently, the
less loaded resource among the potential resources
and a start time d such that:
– For the first operation of a job (according to
the process routing) d is equal to the release date of
the job.
– Otherwise, d is equal to the finish time of its
precedent operation (JP(O
i
)).
Such an initial allocation satisfies all precedence
and temporal constraints. However, it remains to
verify the disjunctive constraints. Each time an
operation is assigned to a resource, its Job agent
informs the concerned Resource agent through the
message "Operation_affected(R
l
, O
i
, d)". At the
receipt of this message, the Resource agent R
l
checks
its satisfaction. In the case that it is unsatisfied, i.e.
there is an overlapping conflict between this
operation and another operation that has been
already affected to it, it tries to find another
satisfying location on it which start time d
1
is the
closest possible to d. If such a location exists, then it
informs the Job agent through the message
"Operation_modified(J
k
, O
i
, d
1
)". Otherwise, it ejects
the operation and sends it to its Job agent in order to
search for another location through the message
"Operation_refused(J
k
, O
i
)". At this moment, the Job
agent sends the operation to another potential
resource through the message
"Place_Operation(R
x
, O
i
)".
The process above-mentioned will be repeated as
many times as the operation is not yet assigned and
for a predefined number of iterations. Once this
threshold is exceeded, namely the Job agent has not
found any location on a potential resource, it will
request one of the possible resources to create a
location through the message "Create_location(R
x
,
O
i
)". Such a location must satisfy all problem
constraints. Similarly, if the Resource agent fails in
creating such a location, it ejects the operation and
sends it to its Job agent to contact another Resource
agent, and so on. This process stops when a second
predefined threshold has been exceeded (for further
details see Ghédira & Ennigrou (2000)).
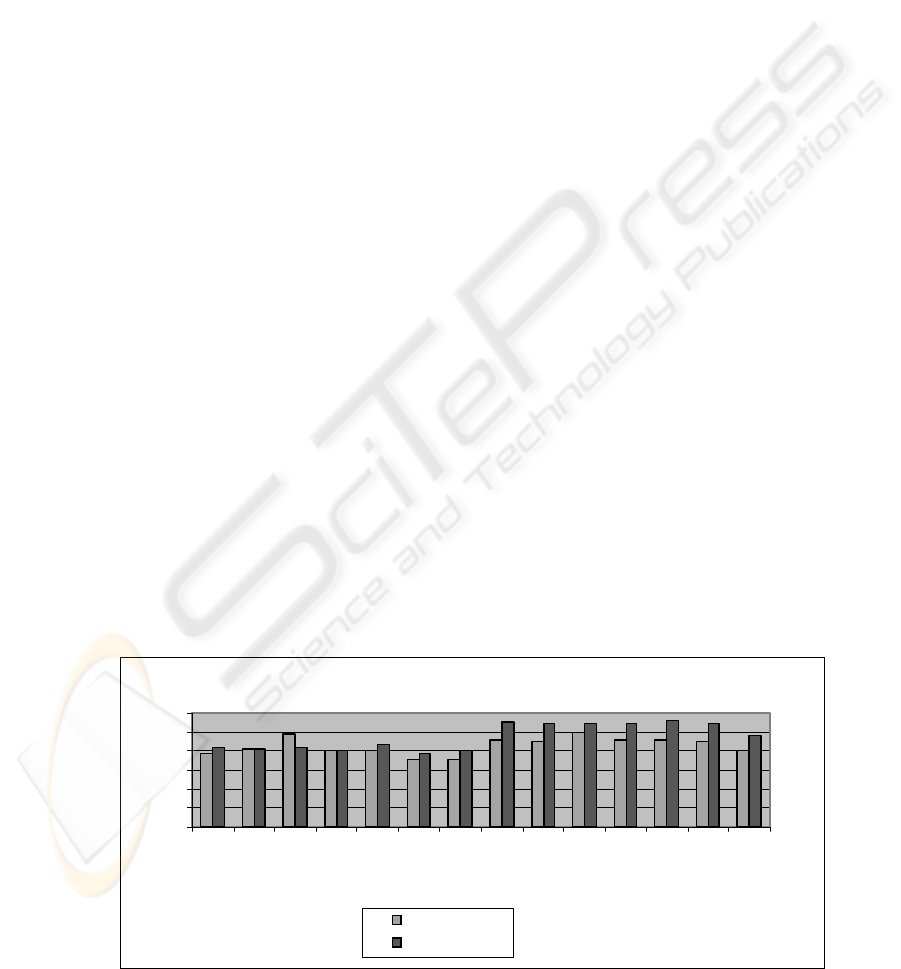
Some experiments have been made to show the
efficiency of such a system to perform good initial
solutions. The benchmarks used in this experiments
are of dimension 15x15. Figure 1 illustrates a
comparison of the performance of our approach and
the one of Mastrollili & Gambrella (2000) in terms
of Makespan.
Figure 1: Initial solution results
0
500
10 0 0
15 0 0
2000
2500
3000
s
e
tb4c9
se
t
b4
c
c
s
e
tb4x
setb4xx
s
et
b4
xx
x
s
e
tb4
xy
setb4xyz
se
t
i
5
c12
se
t
i
5cc
seti5x
seti5xx
se
t
i
5
x
xx
se
t
i
5
xy
seti5xyz
Notre App,
Mast&Gamb,
MULTI-AGENT APPROACH BASED ON TABU SEARCH FOR THE FLEXIBLE JOB SHOP SCHEDULING
PROBLEM
25
5.2 Optimisation Phase
At the end of the first phase detailed earlier, the
Interface agent receives the initial solution and
launches then the second phase, namely the
optimisation phase based on tabu search method.
The following algorithm presents the core of the
optimisation process implanted in the Interface
agent.
1. tabu_list
←
∅
2. nb_iter
←
0
3. current_sol
←
initial_solution
4. best_sol
←
current_sol
5. while nb_iter <= nb_iter_max do
6. iter
←
1
7. while iter <= iter_max & nb_iter <=
nb_iter_max do
8. path
←
critical_path (current_sol)
9. neighbourhood
←
determine_
neighbourhood (path)
10. best_neighbour
←
determine_best_
neighbour(neighbourhood
11. tabu_list
←
add_in_tabu_list(best_neighbou
r)
12. current_sol
←
perform_mvt
(current_sol,best_neighbour)
13. if cost(current_sol) < cost(best_sol) then
14. best_sol
←
current_sol
15. nb_iter
←
0
End if
16. nb_iter
←
nb_iter+1
17. iter
←
iter+1
End while
18. Diversification
End while
Once the best neighbour among the
neighbourhood of the current solution has been
chosen, the Interface agent sends the operation
concerned to its Job agent through the message
"Place_Operation (J
k
, O
i
, R
l
)" in order to inform it
about the move to perform. At the receipt of this
message, the Job agent sends this operation to the
Resource agent R
l
in order to find a location starting
at date d satisfying all problem constraints through
the message "Operation_allocated(R
l
, O
i
, d)". The
same process described in the first phase will be then
repeated.
When the number of iterations between two best
solutions exceeds a predefined threshold "iter_max",
a diversification phase is performed. The latter
consists in varying the search in order to explore
new regions of the search space. In our approach,
such a phase is characterized by replacing some
operations selected randomly. An operation is
replaced on one of its potential resources selected
also randomly.
6 ILLUSTRATIVE EXAMPLE
Let we consider a flexible Job Shop problem of
dimension 3x3. The following table describes the
processing times of the different operations on the
different resources.
M
1
M
2
M
3
O
11
x 8 x
O
12
x 8 x
O
13
x 6 x
O
21
11 2 x
O
22
x 3 10
O
23
11 x 10
O
31
12 x 12
O
32
4 x 12
O
33
12 x x
Table1: Processing times of a flexible Job Shop problem
3x3
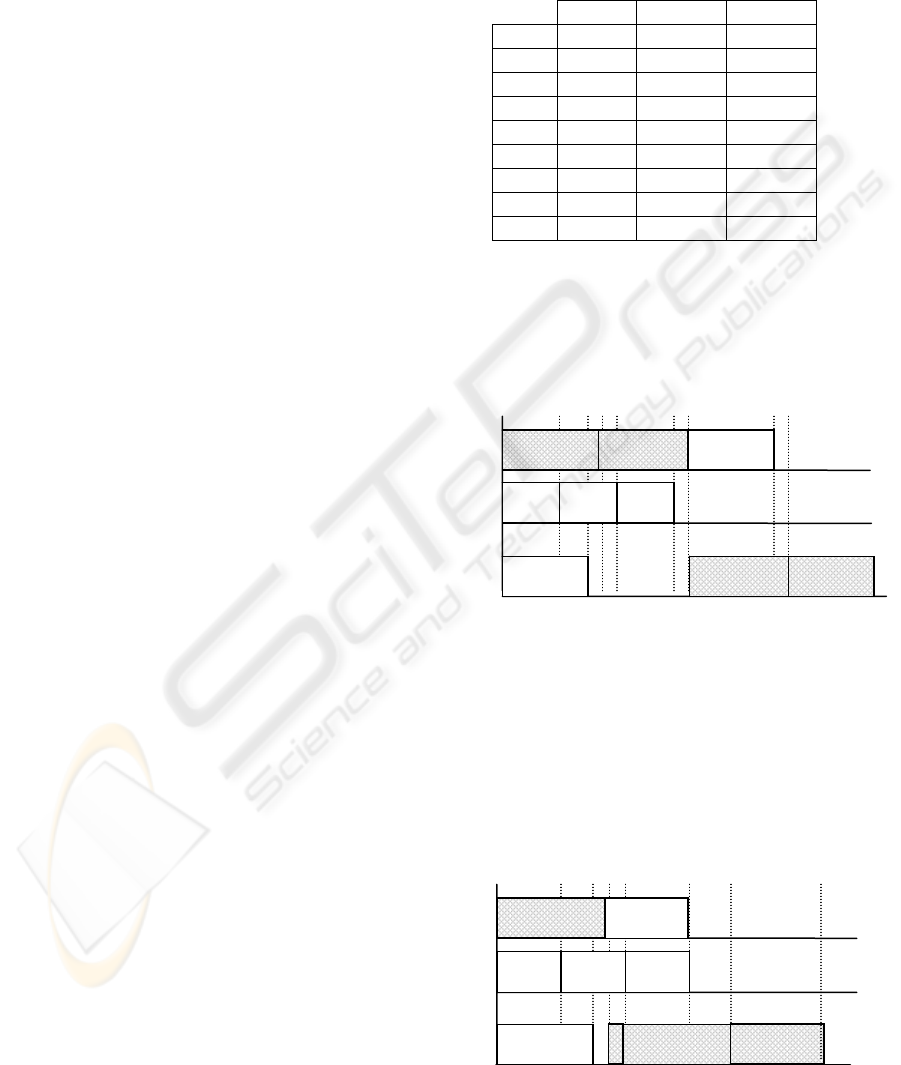
Figure 2 shows the initial solution provided by
the first phase of our approach. The critical path is
composed of the operations O
31
, O
32
, O
33
, O
23
. The
cost of this solution is equal to 47.
Figure 2: Initial Solution
The neighbourhood of the current solution is
composed of the following possible moves:
– Replacement of O
31
on M
1
– Replacement of O
32
on M
1
– Swap of O
33
and O
23
– Replacement of O
23
on M
3
The best neighbour among the previous moves is
the replacement of O
32
on M
1
, which cost is 39.
Figure 3 illustrates the new solution obtained.
Figure 3: Iteration 1 of the tabu search.
M
1
M
2
M
3
O
21
O
11
O
12
O
13
O
31
O
32
O
22
O
33
O
23
M
1
M
2
M
3
O
21
O
11
O
12
O
13
O
31
O
O
22
O
33
O
23
O
32
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
26
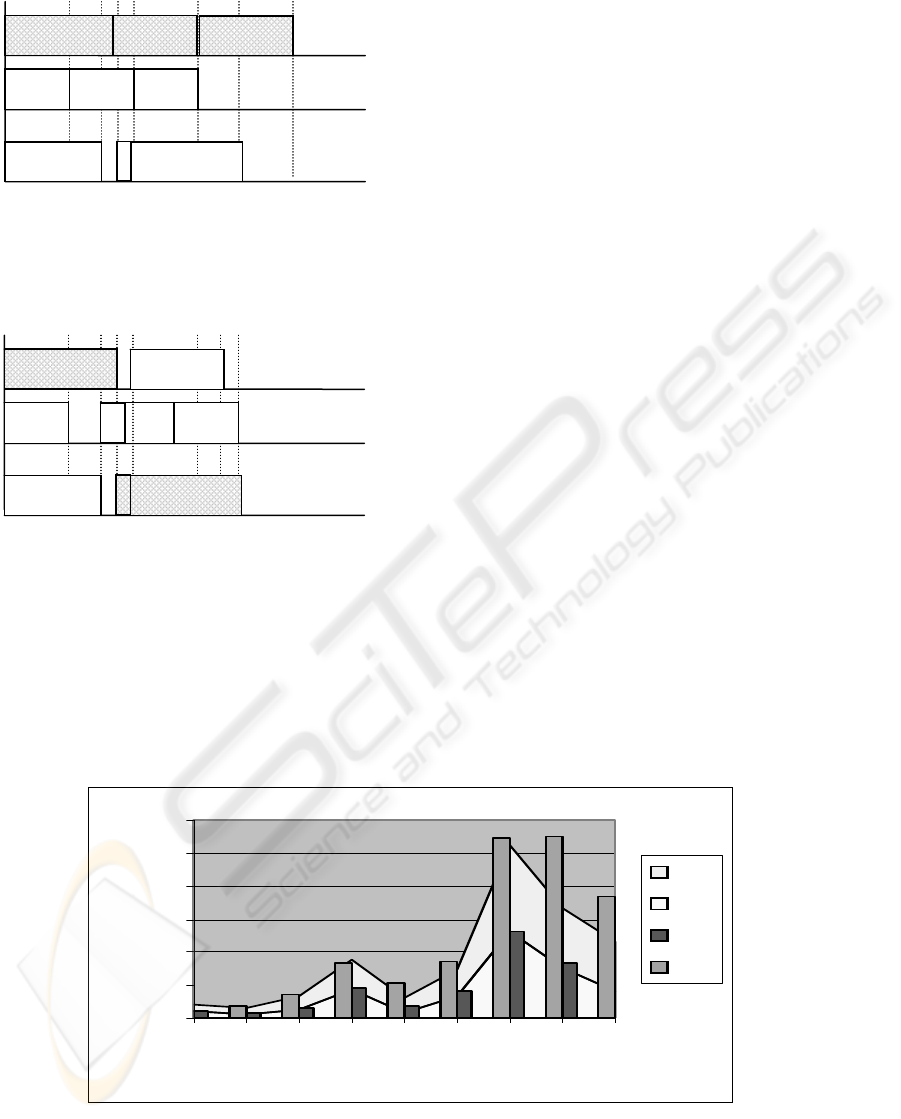
Figure 4: Iteration 2 of the tabu
Figure 5 shows the final solution obtained by the
solving process.
Figure 5: Optimal solution
7 EXPERIMENTS
Some experiments have been made on various
benchmarks defined by Brandimarte (1993),
Dauzerre-Peres & Paulli (1997), Chambers and
Barnes (1996) and Hurink et al. (1994). These
benchmarks have a number of jobs varying in the
set{10, 15, 20}, the number of resources in the range
[5, 20], the number of operations per job in the range
[5, 25] and the number of potential resources per
operation in the range [1, 3]. Consequently, the
benchmarks considered have a total number of
operations ranging in [50, 500].
For each benchmark, many executions have been
performed due to the great number of parameters to
define in the tabu search method and also due to the
random character of the diversification process. Five
executions have been performed for each instance
and for each parameter. The results mentioned later
show the minimum of the five iterations.
The parameters used in the tabu search are the
following:
– Tabu list size varying in {7,10,15,20,30}
– Total number of iterations nb_iter_max fixed
to 1000
– Number of iterations between two
diversification phases iter_max varying in
{250,300,350}
Figure 6 points up a comparison between the
initial solution and the optimal solution elaborated
by the two phases of our approach as same as the
lower and the upper bounds presented in the
literature for the same instances. This figure shows
that our approach provides optimal solutions
belonging to the range defined by the lower and the
upper bound.
Figure 6: Brandimarte Benchmarks
M
1
M
2
M
3
O
21
O
11
O
12
O
13
O
31
O
O
22
O
33
O
23
O
32
0
200
400
600
800
1000
1200
Mk01
Mk0
2
Mk0
4
Mk0
5
Mk0
6
Mk0
7
Mk0
8
Mk0
9
Mk1
0
UB
LB
Min
C0
M
1
M
2
M
3
O
21
O
11
O
12
O
13
O
31
O
O
33
O
23
O
22
O
32
MULTI-AGENT APPROACH BASED ON TABU SEARCH FOR THE FLEXIBLE JOB SHOP SCHEDULING
PROBLEM
27

8 CONCLUSION
In this article we have presented a Multi-Agent
approach for solving the flexible Job Shop problem.
This approach is based on the tabu search method.
The Multi-Agent system proposed is composed of
three agent classes: Job agents, Resource agents and
an Interface agent. Each agent class is responsible
for the satisfaction of the constraints under its
jurisdiction. Some experiments have been made on a
plenty of benchmarks. The results provided show a
substantial difference in cost between the initial
solution and the optimal one as same as the
existence of the latter solution in the range defined
by the lower and the upper bounds given in the
literature. Our perspectives are to distribute the tabu
search process between the society of agents in order
to make the decision shared between the agents
instead of its centralisation in the Interface agent.
REFERENCES
Brandimarte P. (1993). Routing and scheduling in a
flexible job shop by tabu search. Annals of Operations
Research 22. pp 158-183.
Brucker, P. et Neyer, J. (1998). Tabu-search for the multi-
mode job-shop problem. OR Spektrum 20, 21-28.
Chambers et Barnes (1996). Flexible Job Shop scheduling
by tabu search. Graduate program in Operations
Research and Industrial Engineering, The university
of Texas at Austin, Technical Report series, ORP96-
09.
Dauzerre-Peres S., Paulli J. (1997). An integrated
approach for modeling and solving the general multi-
processor job shop scheduling problem using tabu
search. Annals of Operations Research 70, 281-306.
Eikelder T., H.M.M., Aarts, B. J. M., Verhoeven, M. G. A.
and Aarts, E.H.L. (1997). Sequential and Parallel
Local Search Algorithms for Job Shop Scheduling.
MIC'97 Proceedings of the 2nd International
Conference on Meta-heuristics, Sophia-Antipolis,
France, pp. 75-80.
Ghédira K. et Ennigrou M. (2000). How to schedule o Job
Shop Problem through agent cooperation. AIMSA
2000: Aritificial Intelligence: Methodology, Systems,
Architectures.
Glover F. (1986). Future paths for Integer Programming
and Links to Artificial Intelligence,.Computers and
Operations Research, 5:533-549.
Hurink E., Jurisch B., Thole M. (1994). Tabu search for
the Job Shop scheduling problem with multi-purpose
machine. Operations Research Spektrum 15, 205-215.
Jain A., Rangaswamy B., Meeran S. (2000). Job shop
neighbourhoods and Move evaluation strategies.
Mastrolilli M., Gambardella L.M. (2000). Effective
Neighborhood Functions for the Flexible Job Shop
Problem. Journal of Scheduling, Volume 3, Issue 1.
Pages:3-20.
Nuijten W., Aarts E. (1996). A computational study of
Constraint Satisfaction for multiple capacitated Job Shop
scheduling. European Journal of Operations Research,
90(2): 269-284.
ICEIS 2004 - ARTIFICIAL INTELLIGENCE AND DECISION SUPPORT SYSTEMS
28
