
POSITION CONTROL OF AN ELECTRO-HYDRAULIC
SERVOSYSTEM
A non-linear backstepping approach
Claude Kaddissi, Jean-Pierre Kenné, Maarouf Saad
École de Technologie Supérieure, 1100 Notre-Dame West street, Quebec H3C 1K3, Canada
Keywords: Electro-hydraulic systems modeling, Non-linear control, Backstepping.
Abstract: This paper studies the control of an electro-hydraulic servosystem using a non-linear backstepping based
approach. These systems are known to be highly non-linear due to many factors as leakage, friction and
especially the fluid flow expression through the servo-valve. Another fact, often neglected or avoided, is
that such systems have a non-differentiable mathematical model for bi-directional applications. All these
facets are pointed out in the proposed model of this paper. Therefore, the control of this class of systems
should be based on non-linear strategies. Many experiments showed the failure of classic control with
electro-hydraulic systems, unless operating in the neighborhood of a desired value or reference signal. The
backstepping is used here to overcome all the non-linear effects. The model discontinuity is solved in this
paper, by approximating the non-differentiable function by a sigmoid, so that the backstepping could be
used without restrictions. In fact, simulation results show the effectiveness of the proposed approach in
terms of guaranteed stability and zero tracking error.
1 INTRODUCTION
An electro-hydraulic system is composed of multiple
components: A pump, which feeds the system with
fluid oil from an oil container; An accumulator,
which acts as an auxiliary of energy integrated in the
hydraulic circuit; A relief valve on the other hand to
compensate the increase of pressure if any; A
hydraulic actuator to drive a given load at a desired
position, its displacement direction, speed and
acceleration are determined by a servo-valve. Note
that oil exiting the hydraulic actuator is driven
through the servo-valve back to the tank.
Electro-hydraulic systems became increasingly
current in many kinds of industrial equipments and
processes. Such applications include rolling and
paper mills, aircraft’s and all kinds of automation
including cars industry where linear movements, fast
response, and accurate positioning with heavy loads
are needed. This is principally because of the great
power capacity with good dynamic response and
system solution that they can offer, as compared to
DC and AC motors. However, as a result of the ever-
demanding complexity with these applications,
considering non-linearity and mathematical model
singularity, the traditional constant-gain controllers
have become inadequate. Lim (1997) applied simple
poles placement for a linearized model of an electro-
hydraulic system. Plahuta et al. (1997) tried a
retroaction strategy for variable displacement
hydraulic actuator and this by using two cascaded
control loops for position and speed control. Zeng
and Hu (1999) used a PDF algorithm (Pseudo-
Derivative Feedback) where the integrator part of a
PID controller was placed in the direct path.
Experiments and simulations showed that factors
resulting in dynamic variations are beyond the
capacity of these controllers. And there are also
many of these factors to take into account, such as
load variations, changes of transducers
characteristics and properties of the hydraulic fluid,
changes of servo components dynamics and other
system components, etc. As a result, many robust
and adaptive control methods have been used. Yu
and Kuo (1996) employed an indirect adaptive
controller for speed feedback, based on pole
placement. Sliding mode controller has been used by
Fink and Singh (1998), in order to regulate the
pressure drop due to the load across the actuator. On
the other hand fuzzy logic control has been
270
Kaddissi C., Kenné J. and Saad M. (2004).
POSITION CONTROL OF AN ELECTRO-HYDRAULIC SERVOSYSTEM - A non-linear backstepping approach.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 270-276
DOI: 10.5220/0001134402700276
Copyright
c
SciTePress
employed by Yongqian et al. (1998), the controller
was based on a decision rules matrix of the error.
Results were very closed to neural network based
controller as in Kandil et al. 1999, where learning
was accomplished through the output error retro-
propagation and thus system knowledge was not
necessary. Simulation results in these advanced
strategies were very successful in most cases, aside
minor transient state problems or small steady state
error. However, stability is not guaranteed in these
approaches. This is because in such cases stability is
studied on discrete domains and one cannot expect
system behaviour at limits. Another point to consider
is that in spite of ensuring system robustness, most
control strategies might generate a control law with
high amplitude, which causes system saturation.
Such is the case of feedback linéarizations.
Therefore one should think to benefit of system non-
linearities that offer more manoeuvrability to avoid
saturating control signals.
This paper proposes a backstepping approach,
tacking into account all system non-linearities. A
major advantage of the backstepping approach is its
flexibility to build a control law by avoiding the
cancellation of useful non-linearities. In addition
modification is brought so the system model can be
used for bi-directional applications. Under such
modification the use of this approach ensures global
stability of the system, and generates low amplitude
control signal.
The paper is organised as follow. Section 2 presents
the dynamic model of the electro-hydraulic system
with emphasis on non-linearity and non-
differentiability. In section 3, we shall present the
design of a backstepping control strategy according
to the system properties. In section 4 Simulation
results and comparisons will be done. Some
conclusions will be carried out in the last section.
2 SYSTEM MODELING
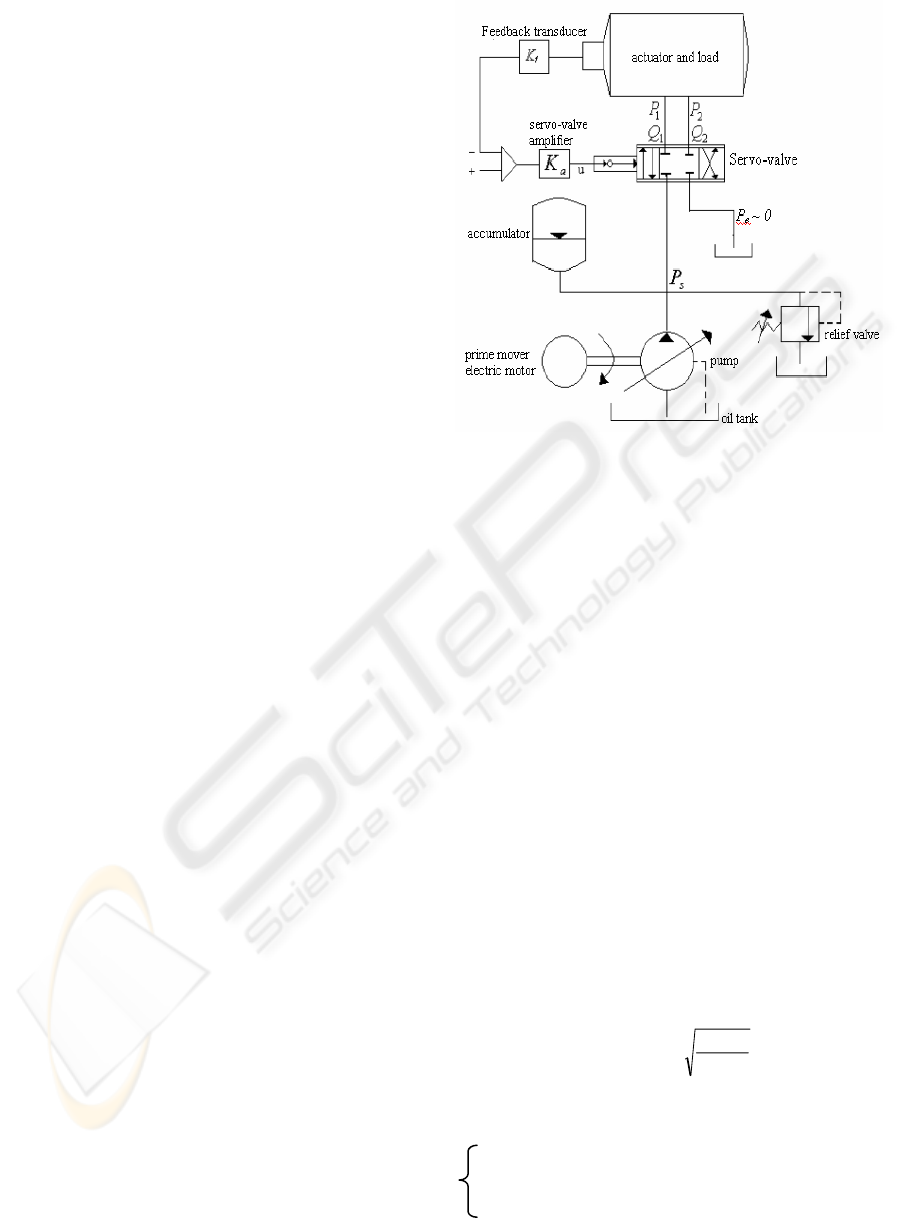
Consider the hydraulic system shown in figure 1. In
this hydraulic circuit the DC electric motor drives
the pump at constant speed. The pump in turn
delivers oil flow from the tank to the rest of the
components. Normally, the pressure P
s
at the pump
discharge depends on the load, however it is made
constant due to the presence of an accumulator and a
relief valve. In fact, the accumulator acts as an
additional pressure source in case needed. On the
other side the relief valve compensates the pressure
increase due to big loads, by returning the additional
Figure 1: Schematic of hydraulic servo-system
amount of flow to the tank. A hydraulic rotary
actuator drives the load. The actuator rotation is due
to the oil flow coming from the servo-valve, the
latter determines its direction, speed and acceleration
through convenient position of its spool. The control
signal being generated by the controller designed in
this paper actuates the spool to the right position. We
should note that the oil returns to the tank from the
servo-valve at atmospheric pressure and we assume
that the latter is a single stage servo-valve, critically
centred and the orifices are matched and
symmetrical.
The dynamic equation for a servo-valve spool
movement can be given by (LeQuoc et al., 1990):
KuAA
vvv
=+
&
τ
(1)
Where u is the control input, K is the servo–valve
constant,
v
τ
is its time constant and A
v
is the valve
opening area. The flow rate from and to the servo-
valve, through the valve
orifices, assuming small
leakage, are given as:
ρ
Ls
vd
PP
ACQQ
−
==
21
(2)
Where P
L
is the differential pressure due to load.
21
PPP
L
−
=
in the positive direction
12
PPP
L
−
=
in the negative direction
POSITION CONTROL OF AN ELECTRO-HYDRAULIC SERVOSYSTEM - A non-linear backstepping approach
271

21
PPP
s
+=
is the source pressure, C
d
is the flow
discharge coefficient and
ρ
is the fluid oil mass
density.
Since oil viscosity might vary with temperature, it
should be considered in the actuator dynamics along
with oil leakage. Thus we give the compressibility
equation as:
LLm
Lvs
vdL
PCD
PAsignP
ACP
V
−−
−
=
θ
ρβ
&
&
)(
2
(3)
We define C
L
as the load leakage coefficient,
β
is
the fluid bulk modulus,
θ
is the output angular
position, V is the oil volume under compression in
one chamber of the actuator and D
m
is the actuator
volumetric displacement.
Now we consider the hydraulic actuator equation of
motion given by Newton’s first law. Neglecting the
frictional torque we have:
Lm
TBPPDJ −−−=
θθ
&&&
)(
21
(4)
T
L
is the load torque, B viscous damping coefficient
and J the actuator inertia.
Note that in equations (3) the non-linear term due to
the flow expression and the non-differentiable sign
function that stands for changing in motion direction,
are at the origin of such systems complexity.
Finally choosing,
θ
=
1
x
,
θω
&
==
2
x
,
L
Px
=
3
,
v
Ax =
4
as state
variables; the system can be easily described with a
4th order non-linear state space model.
=
+−=
−−−=
−−=
=
1
44
234343
232
21
)(.
xy
urxrx
xpxpxsignxPxpx
wxwxwx
xx
ba
cbsa
cba
&
&
&
&
(5)
Where r
a
, r
b
, p
a
, p
b
, p
c
, w
a
, w
b
, w
c
, are appropriate
constants given by,
v
a
r
τ
1
=
,
v
b
K
r
τ
= ,
ρ
β
V
C
p
d
a
2
=
,
V
C
p
L
b
β
2
=
,
V
D
p
m
c
β
2
=
,
J
D
w
m
a
= ,
J
B
w
b
= ,
J
T
w
L
c
=
3 BACKSTEPPING BASED
NON-LINEAR CONTROL
In this section, the non-linear backstepping, as
presented by Hassan (2002), will be used to control
the electro-hydraulic system presented in figure 1.
The control law is derived based on a lyapunov
function, to ensure an input-output stability of the
system. This method has been employed before by
Ursu and Popescu (2002) with a reduced order
model of an electro-hydraulic system, for position
control; and with a 4
th
order model for load pressure
control, all with positive desired trajectories or
1)(
4
=
xsign . Later and for better tracking
characteristics the backstepping was applied to a 5
th
order electro-hydraulic system model (Ursu, F. et al.
2003). However the same assumption was held (i.e.
a positive reference for position). Conversely, it is
very vital to consider the case of a trajectory that
takes positive and negative values. Else, the system
application will loose generality, and will bypass a
large number of applications where electro-hydraulic
systems are used. One of those is electro-hydraulic
active suspension, where a hydraulic actuator has to
ensure a minimum vertical displacement of the car
body. Thus, it is evident that under road stochastic
fluctuations, the servo-valve will direct the flow to
the actuator in either ways, depending if the car is
crossing a bump or a pothole. Here, this method will
be used with the system model (5) for position
control and appropriate modification will be brought
to account for a positive-negative varying reference.
We denote by
idii
xxe
−
=
for 4,...,1=i the error
between each state variable and its desired trajectory.
Let us choose a candidate lyapunov function defined
by,
2
2
11
1
e
V
ρ
=
(6)
Then its derivative is given by,
)()(
1221111111 ddd
xxeexxeV
&&&
&
−+=−=
ρρ
Thus, taking
1112
ekxx
dd
−
=
&
(7)
Renders,
211
2
1111
eeekV
ρρ
+−=
&
(8)
In a second step we shall take,
2
2
22
12
e
VV
ρ
+=
(9)
ICINCO 2004 - ROBOTICS AND AUTOMATION
272
And its derivative,
22212
eeVV
&
&&
ρ
+=
3222112
2
111
[ ewxweeek
ab
ρρρρ
+−+−=
]
22232 dcda
xwxw
&
ρ
ρ
ρ
−−+
Here, taking
a
c
a
d
aaa
b
d
w
w
e
w
k
x
w
e
w
x
w
w
x +−+−=
2
2
2
21
2
1
2
3
1
ρρ
ρ
&
(10)
Will give,
322
2
22
2
1112
eewekekV
a
ρρ
+−−=
&
(11)
Next, consider
2
2
33
23
e
VV
ρ
+= (12)
Its derivative is given by,
33323
eeVV
&
&&
ρ
+=
2
22
2
111
ekek −−=
ρ
323223
([ xpxpewe
bca
−−++
ρρ
)])()(
34434 ddsa
xxexxsignPp
&
−+−+
By choosing,
34
332
3
2
332
4
)(
)(
xxsignPp
eke
w
xxpxp
x
sa
a
dbc
d
−
−−++
=
ρ
ρ
&
(13)
We have,
2
333
2
22
2
1113
ekekekV
ρρ
−−−=
&
34433
)( xxsignPeep
aa
−+
ρ
(14)
Finally we consider,
2
2
44
34
e
VV
ρ
+= (15)
Next we derive equation (15) and obtain,
44434
eeVV
&
&&
ρ
+=
2
333
2
22
2
111
ekekek
ρρ
−−−=
dba
xurxre
44444
)([
&
ρ
ρ
−+−+
])(
3433
xxsignPep
sa
−+
ρ
By setting the control u as stated by equation (16)
Figure 2: Figure 3:
sign function sigmoid function
−−−+=
4
4
4
343
4
3
44
)(
1
e
k
xxsignPe
p
xxr
r
u
s
a
da
b
ρρ
ρ
&
(16)
We should get the following result,
0
2
44
2
333
2
22
2
1114
<−−−−= ekekekekV
ρρ
&
(17)
Unfortunately, this is not the case because the
control signal u is a discontinuous signal, which
involves the derivative of x
4d
that contains a sign(x
4
)
function. Thus it is impossible to generate such
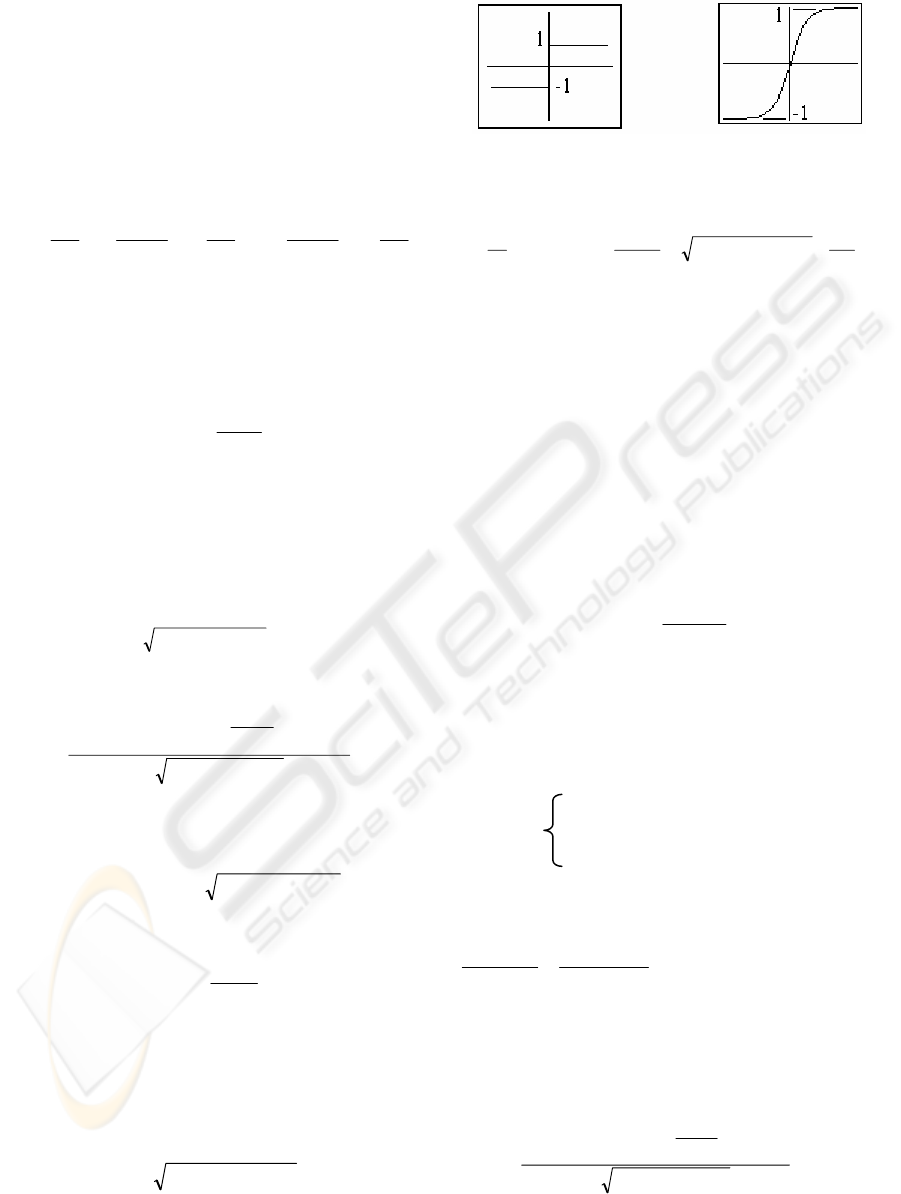
control signal. For that reason and to remedy this
problem, we introduce the sigmoid function defined
by (see figure 2 and 3),
ax
ax
e
e
xsigm
−
−
+
−
=
1
1
)(
(18)
This is a continuously differentiable function with
the following properties,
0>a
1 if
∞→ax
=
)(xsigm 0 if x = 0 (19)
-1 if
−∞→ax
and,
2
)1(
2
)(
ax
ax
e
ae
dx
xdsigm
−
−
+
=
(20)
Note, that the rate at which sigm(x) converges to 1 or
–1 depends on the slope ‘a/2’.
Now we can rewrite the equation (13) as,
34
332
3
2
332
4
)(
)(
xxsigmPp
eke
w
xxpxp
x
sa
a
dbc
d
−
−−++
=
ρ
ρ
&
(21)
Therefore we can solve for control signal u in (16)
by
POSITION CONTROL OF AN ELECTRO-HYDRAULIC SERVOSYSTEM - A non-linear backstepping approach
273
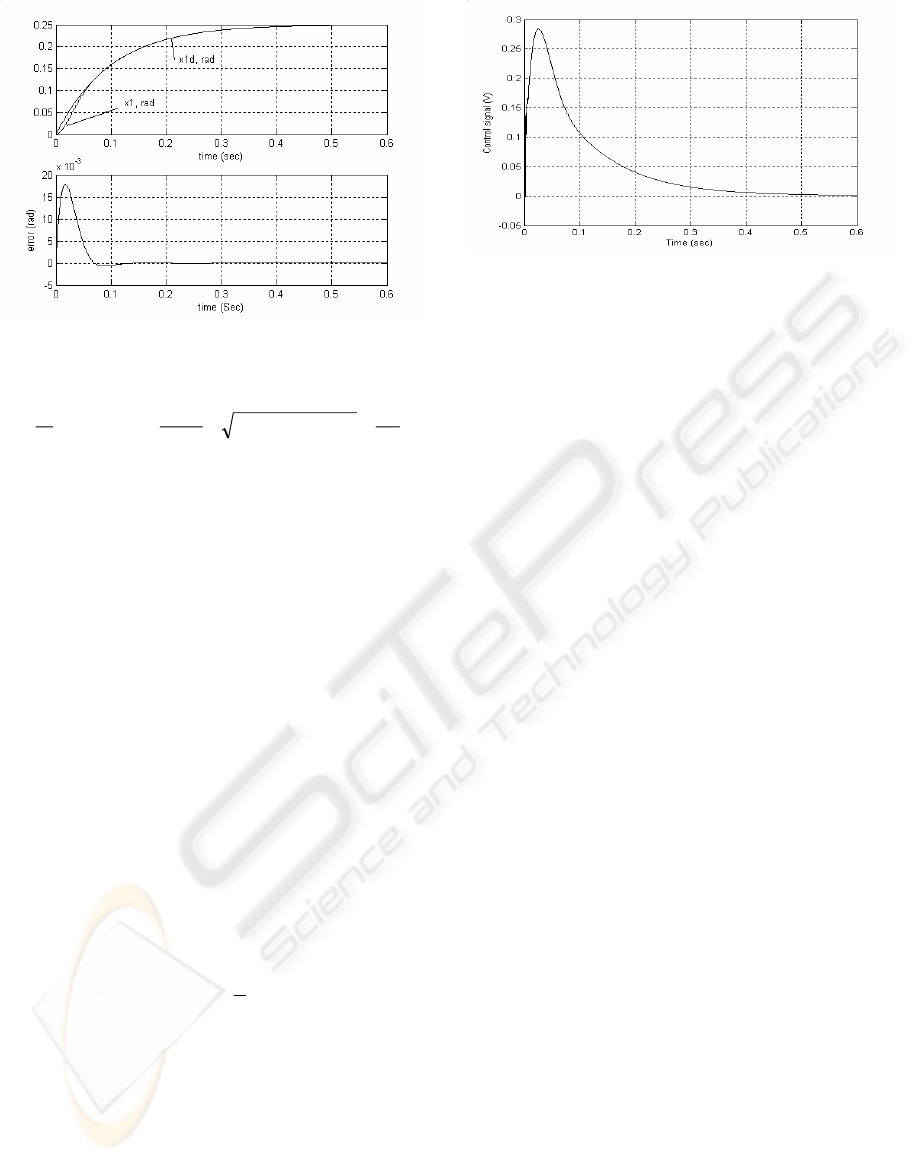
Figure 4: Position vs. desired position and
tracking error
−−−+=
4
4
4
343
4
3
44
)(
1
e
k
xxsigmPe
p
xxr
r
u
s
a
da
b
ρρ
ρ
&
(22)
That
gives,
0
2
44
2
333
2
22
2
1114
<−−−−= ekekekekV
ρρ
&
We can state now, that
0
4
<V
&
for every 0
≠
i
e ,
thus we conclude that the control law found in (22)
renders the system globally asymptotically stable.
In the next section we present the simulation of the
controlled system.
4 SIMULATIONS AND RESULTS
We shall present in this section, simulation results to
reveal the backstepping efficiency and robustness in
all cases (see appendix for control parameters
values).
First, let us choose a desired trajectory for position
that tends to a constant,
−=
−
r
t
t
fd
exx 1
11
> 0 (23)
Thus,
fd
xx
11
→
when ∞→
t
, with a time constant
t
r
. Where we set x
1f
= 0.25rad and t
r
= 0.1 sec.
Graphics are given in figures 4 and 5. Figure 4,
shows how the system output x
1
follows the desired
trajectory with an excellent transient state and a zero
tracking error in steady state. On the other hand
figure 5 shows a smooth control signal generated by
Figure 5: Control signal
equation (22), which drives the servo-valve spool x
4
to the convenient positions, far from saturating
amplitudes. Once desired position reached, x
4
holds
at zero hence no oil will flow to the actuator.
Next we will consider the case of a ‘sine function’
for the desired position with 1 amplitude and 2.5
rad/s frequency. Hence at zero crossing the valve
spool will have to move in the negative direction as
well as the actuator. Figure 6 and 7 shows the
comparison of the control signal when the model in
(5) is simulated with the sign function and the
sigmoid function respectively. It is obvious in the
first case, that when the actuator changes its
direction the discontinuous sign term gives infinite
control amplitude. While, a smooth control is
obtained with the proposed sigmoid function.
Furthermore, as seen from figure 8 the sigmoid
converges exponentially towards a sign with
constant a = 2500.
Finally as seen from figure 9; the
backstepping used with the new system model,
achieves a perfect tracking of the desired position.
This approach is compared with the results of a
classical PID controller based on pole placement. It
is obvious; the PID fails to achieve good tracking,
which results in large steady state error.
We conclude that, the backstepping effectiveness is
not affected by the approximation we made. The
latter allows a smooth continuous control signal as in
figure 7, which justify at the end of our work the
choice for
this approach and the proposition we
brought to the system model.
5 CONCLUSION
In this paper we studied the position control of an
electro-hydraulic servo-system. The control law we
established is based on the non-linear backstepping.
Our goal was to account for the system non-linearity
and non-differentiability, and to show how system
stability is globally guaranteed. We saw how
mathematical model non-differentiability prohibits
ICINCO 2004 - ROBOTICS AND AUTOMATION
274
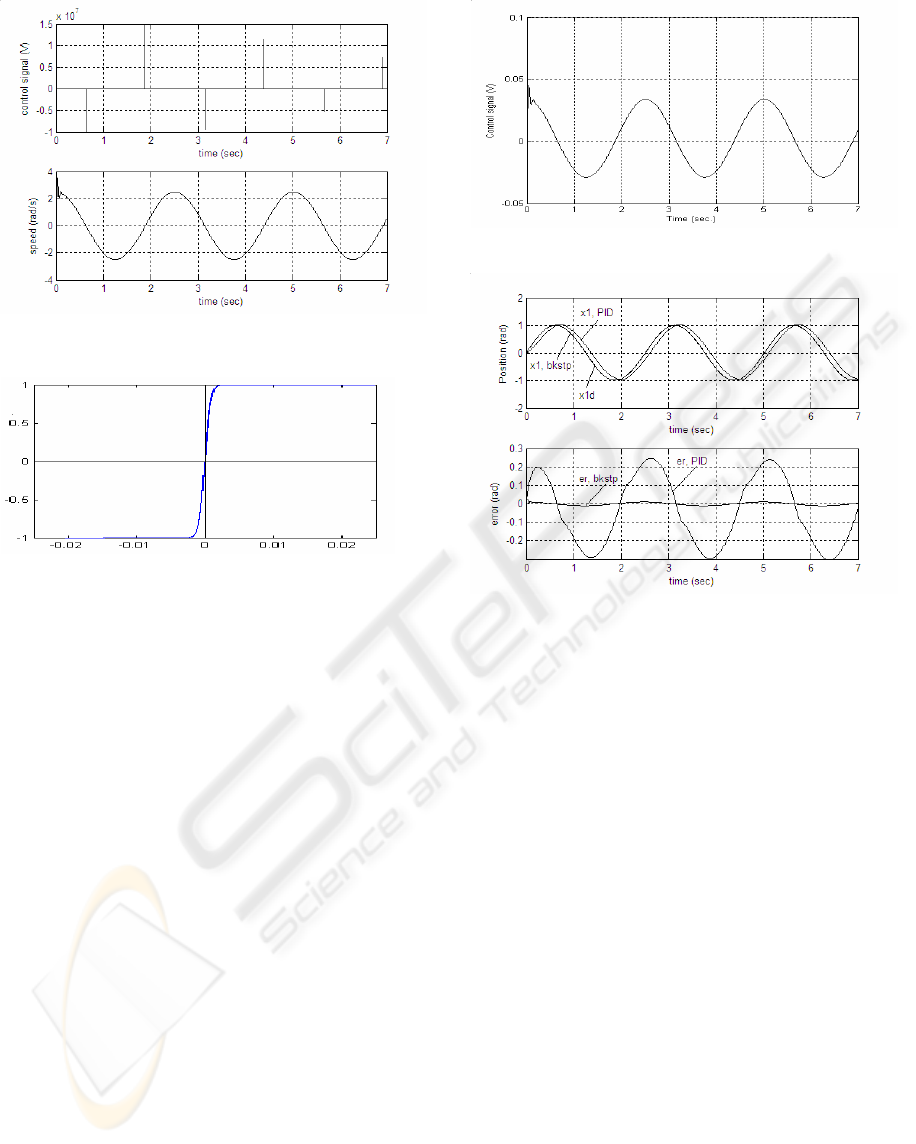
Figure 6: Control signal and actuator speed when
sign function is used
Figure 8: sigm(x
4
) compared to sign(x
4
)
successful control. Introducing the sigmoid function
brought solution to the non-differentiable aspect and
gave the model a smoother expression allowing
successful control via the same strategy. Comparison
with classical PID showed the effectiveness of this
control strategy, as it ensures perfect tracking with
small transient and steady state error. Our future
work consists of real time implementation of this
control law to reveal its effectiveness and bring
improvements if necessary. We are looking as well
to industrial applications of electro-hydraulic
systems, especially in cars industry. Our fields of
interests are basically electro-hydraulic active
suspension control and power transmission control
systems, for better ride quality. Those are the most
competent nowadays applications for hydraulic
servo-systems; especially that road means of
transports are facing a great competition on behalf of
the air and maritime transportations means.
REFERENCES
Fink, A., & Singh, T. (1998). Discrete sliding mode
controller for pressure control with an
electrohydraulic servovalve.
Paper presented at the
control Applications, 1998. Proceedings of the 1998
IEEE International Conference on.
Figure 7: Control signal when sigmoid is used
Figure 9: Position vs. desired position and tracking error
for backstepping and PID
Hassan, K. (2002).
Non-Linear Systems (Third ed.):
Prentice Hall, Upper Saddle River NJ07458.
Kandil, N., LeQuoc, S., & Saad, M. (1999). On-Line
Trained Neural Controllers for Nonlinear Hydraulic
System.
14th World Congress of IFAC, 323-328.
LeQuoc, S., Cheng, R. M. H., & Leung, K. H. (1990).
Tuning an electrohydraulic servovalve to obtain a high
amplitude ratio and a low resonance peak.
Journal of
Fluid Control, 20
(3Mar), 30-49.
Lim, T. J. (1997).
Pole placement control of an
electrohydraulic servo motor.
Paper presented at the
Power Electronics and Drive Systems, 1997.
Proceedings., 1997 International Conference on.
Plahuta, M. J., Franchek, M. A., & Stern, H. (1997).
Robust controller design for a variable displacement
hydraulic motor.
American Society of Mechanical
Engineers, The Fluid Power and Systems Technology
Division (Publication) FPST. Proceedings of the 1997
ASME International Mechanical Engineering
Congress and Exposition, Nov 16-21 1997, 4
, 169-176.
Ursu, I., F. Popescu, & Ursu, F. (2003, May 29-31,).
Control synthesis for electrohydraulic servo
mathematical model.
Paper presented at the
Proceedings of the CAIM 2003, the 11th International
Conference on Applied and Industrial Mathematics,
Oradea, Romania.
POSITION CONTROL OF AN ELECTRO-HYDRAULIC SERVOSYSTEM - A non-linear backstepping approach
275
Ursu, I., & Popescu, F. (2002, October 11-13,).
Backstepping control synthesis for position and force
nonlinear hydraulic servoactuators.
Paper presented at
the Book of Abstracts of the CAIM 2002, 10th
International Conference on Applied and Industrial
Mathematics,. Pitesti, Romania, October 11-13, p. 16.
Yongqian, Z., LeQuoc, S., & Saad, M. (1998).
Nonlinear
fuzzy control on a hydraulic servo system.
Paper
presented at the American Control Conference, 1998.
Proceedings of the 1998.
Yu, W.-S., & Kuo, T.-S. (1996). Robust indirect adaptive
control of the electrohydraulic velocity control
systems.
IEE Proceedings: Control Theory and
Applications, 143
(5), 448-454.
Zeng, W., & Hu, J. (1999). Application of intelligent PDF
control algorithm to an electrohydraulic position servo
system.
IEEE/ASME International Conference on
Advanced Intelligent Mechatronics, AIM Proceedings
of the 1999 IEEE/ASME International Conference on
Advanced Intelligent Mechatronics (AIM '99), Sep 19-
Sep 23 1999
, 233-238.
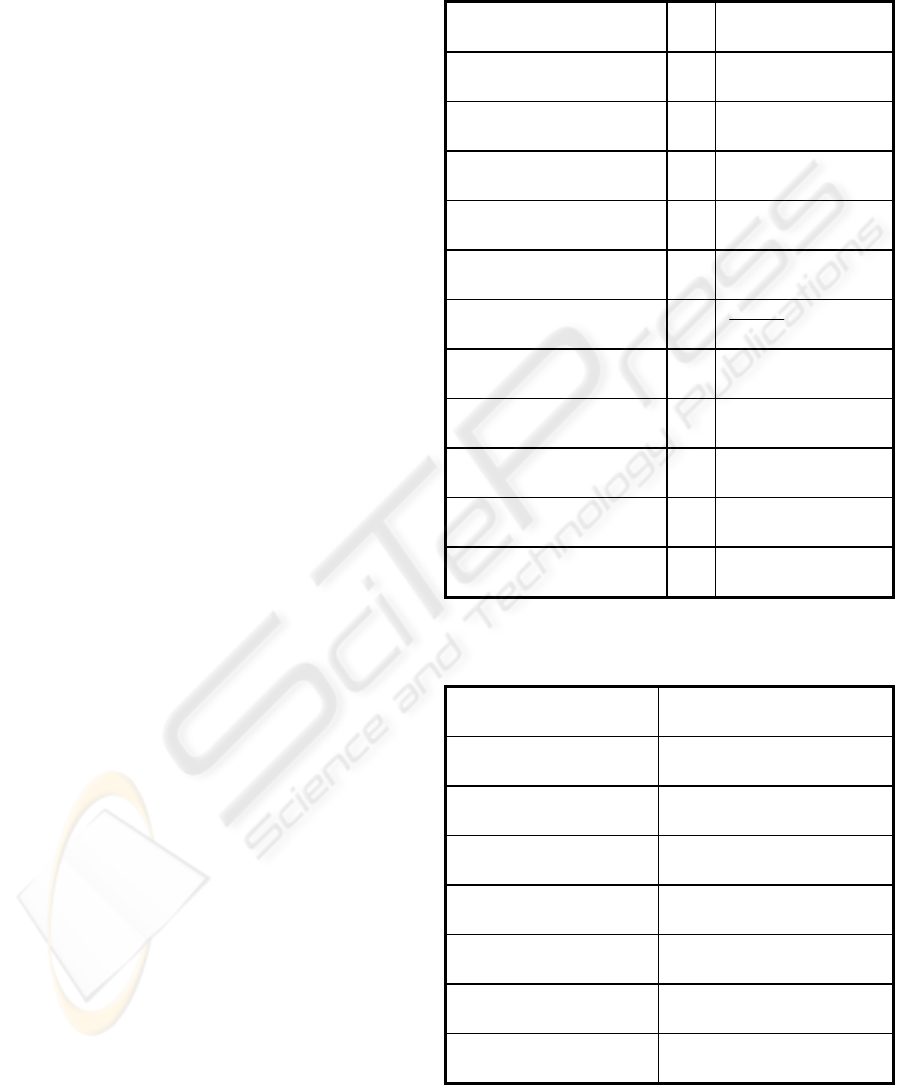
APPENDIX
Table 1: Hydraulic servo-system parameters
Servo-valve time constant
v
τ
3.18x10
-3
sec
Servo-valve amplifier gain K 0.0397cm
2
/V
Flow discharge coefficient C
d
0.63
Fluid bulk modulus
β
7.995x10
3
daN/cm
2
Actuator chamber volume V 135.4 cm
3
Supply pressure P
S
68.94 daN/cm
2
Fluid mass density
ρ
5
10981
85
x
g/cm
3
Leakage coefficient C
L
0.09047 cm
5
/daN.s
Actuator displacement D
m
2.802 cm
3
/rad
Viscous damping coeff. B 0.766 daN.s.cm
Actuator Inertial load J 0.0481 daN.cm.s
2
Actuator load torque T
L
11.2 daN.cm
Table 2: Control parameters
k
1
10
k
2
2.5
k
3
900
k
4
800
1
ρ
400
2
ρ
0.05
3
ρ
0.003
4
ρ
1700
ICINCO 2004 - ROBOTICS AND AUTOMATION
276
