
Usage of Cognitive Architectures in the Development of Industrial
Applications
Utilization of a General Cognitive Process in the Domain Building Automation
Alexander Wendt
1
, Stefan Kollmann
1
, Lydia Siafara
1
and Yevgen Biletskiy
2
1
Institute of Computer Technology, TU Vienna, Vienna, Austria
2
Department of Electrical and Computer Engineering, University of New Brunswick, New Brunswick, Canada
Keywords: Cognitive Architecture, AI, Building Automation, Decision-making, KORE, Industrial Application, ACONA,
Control Strategy.
Abstract: Cognitive architectures, which originate from the field of Artificial Intelligence, implement models for
problem-solving and decision-making. These architectures have a wide room for implementation in industrial
applications. The goal is to adapt a cognitive architecture to the demands of an application in the area of
building automation. It is analyzed, why cognitive architectures are difficult to apply in industrial domain.
The result of the analysis is a cognitive process, which is applied to an application in the building automation
domain. The use of the architectures is demonstrated within a Java-based based middleware. There, the
cognitive architecture is applied for the automatic generation and improvement of control strategies in
building automation, which have the goal to minimize energy consumption with minimal reduction of the
comfort.
1 INTRODUCTION
Cognitive architectures provide a general framework
for developing computational decision-making
applications and are often, but not necessarily, based
on theories of the human mind (Langley et al., 2009).
Autonomous decision-making ability is demanded in
the context of the growing complexity of industrial
applications. Therefore, they have a potential to
contribute to such applications. Unfortunately, up to
now, the few examples of industrial applications.
(Kotseruba et al., 2016) raise the question whether
cognitive architectures are suitable to apply for
software development besides of experiments. This
problem is addressed by proposing an approach to
enhance the systematic application of cognitive
architectures in the field of industrial systems.
As a method, we initially review well-known
examples of cognitive architectures and discuss their
functionality and usage in industrial applications.
Then, we specify the types of software applications
where cognitive architectures fit into and identify
problems that may emerge during the adaptation of
the architectures to a certain application. Based on
this analysis, we propose in the last part of the paper
our solution that consists of a cognitive process,
which is common for all studied architectures. The
process is implemented as an architecture. Finally, the
functionality of the architecture is demonstrated
within the project KORE (Cognitive Optimization of
Control Strategies for Increasing Energy-efficiency
in Buildings) (Zucker et al., 2016). KORE is applied
in the domain of building automation, which has the
purpose to optimize energy consumption under the
constraints of comfort.
2 EXISTING APPLICATIONS OF
COGNITIVE ARCHITECTURES
Cognition, according to Vernon et al., “can be viewed
as the process by which the system achieves robust,
adaptive, anticipatory, autonomous behaviour,
entailing perception and action” (Vernon et al., 2007).
It implies that the cognitive system is able not only to
understand the current situation but also to function
efficiently in situations for which it was not intended.
Among cognitive architectures, SOAR (State
Operator and Result) (Langley et al., 2009) and LIDA
(Learning Intelligent Distribution Agent)
Wendt, A., Kollmann, S., Siafara, L. and Biletskiy, Y.
Usage of Cognitive Architectures in the Development of Industrial Applications - Utilization of a General Cognitive Process in the Domain Building Automation.
DOI: 10.5220/0006679806410648
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 2, pages 641-648
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
641

(Ramamurthy et al., 2006) are prominent examples
with different origins. While SOAR origins from the
domain of logical problem solvers in classical
artificial intelligence, LIDA tries to model the human
mind and origins from neurological theories. Each
cognitive architecture has its advantages and
drawbacks.
SOAR is a general-purpose architecture that
implements cognitive functionality and defines
system behaviours by rules. LIDA is a cognitive
architecture that aims to model the human mind. It
provides a framework for cognitive architectures,
where modules can be arbitrary created and linked.
LIDA uses a partly bottom-up approach, where
activated content or ideas of what to do are competing
for attention. The winning content receives the
attention and gets its action developed and executed.
The cognitive architecture ICARUS (Langley et al.,
2011) origins from the area of autonomous robots. It
differs from SOAR as it uses several different
memories to store skills, concepts and beliefs.
The cognitive architecture BDI (Belief, Desire,
Intention) (Gottifredi et al., 2008) adds the
component of a desire to cognitive architectures,
where desires represent the goals of the system. SiMA
(Simulation of the Mental Apparatus & Applications)
(Schaat et al., 2017) extends the desires further into
drives, emotions and feelings, which are used as
evaluation mechanisms of different options of the
system. Multi-agent solutions have gained attention
within the community due to their ability to scale and
allow partitioned development. An approach is the
ACNF Cognitive Framework (Crowder et al., 2014).
SOAR and BDI (Gottifredi et al., 2008) have been
applied as the decision-making in robots. ICARUS
(Choi et al., 2009), BDI (Dignum et al., 2009), LIDA
(Sandsmark and Viktil, 2012) and SiMA (Schaat et
al., 2017) have been applied to games or simulations
of virtual human-like actors. The agent TAC-Air-
Soar (Heinze et al., 1999) shows the potential of
cognitive architectures as virtual pilots in the
modelling of fighter pilots in air combat scenarios.
Since the theory of cognitive architectures often
origins from psychology, some of them are used to
mimic human behaviour in psychological
experiments (Anderson et al., 2004), (Wendt et al.,
2015), (Gobet and Lane, 2010). In addition, there
exist real-world applications, where the predecessor
of LIDA has been deployed. In the US Navy, it
manages jobs for sailors, where the task is to offer
jobs for sailors depending on the sailor’s preferences,
the Navy’s policies, the needs of the tasks and the
urgency (Franklin and Patterson Jr, 2006).
3 ANALYSIS OF APPLICATIONS
Cognitive architectures tend to be more suitable for
particular application classes. The criteria for such
applications are analyzed in the following.
3.1 Suitable Applications
As the human mind is claimed to be the most complex
biological system that we know about, it would be
expected that the same decision process would benefit
industrial applications that are applied in complex
environments (Dietrich and Zucker, 2008). These
applications do not have access to all information
about their environments and have to make decisions
based on judgment instead of deterministic inputs.
Current applications can be categorized into two
main groups: controllers for physical robots and
virtual human in simulations. The domains are close
to the area of the human mind. An application that
differs from the others is the LIDA sailor application.
Their common denominator is that they have to select
one action out of several possible, comparable and
competing actions, to fulfil certain goals. Due to the
risk of applying a massive overhead, applications that
operate only with complicated problems, where the
environment is completely known are therefore not
appropriate.
Because decisions in these applications are based
on judgment and not on determinism, the evaluation
of options plays a major role. The program logic
together with stored data determines how to evaluate
option. Compared to a straightforward coded
program, a cognitive architecture has the advantage
that a lot of necessary program logic is transferred
from the code into knowledge. Due to the provided
infrastructure, it can be claimed that if a cognitive
architecture is used in a certain complexity of an
environment, the implementation should be possible
with less effort than using a direct implementation of
a state machine.
The claim can be understood in the following
context: Suppose that a game like Pacman is
developed. The goal is for a player to eat food and
avoid the ghosts. In the simplest case, decision-
making consists of some rules that define the
behaviour for each situation. The more inputs are
available, the more rules have to be written. At the
point of competing options, the code gets messy.
Evaluation of each option regarding some criteria is
necessary. Here, a cognitive architecture makes
sense. If such a system is extended, only to the way
options are created and evaluated has to be addressed.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
642

3.2 Problems with Common Cognitive
Architectures
Although cognitive architectures seem to be very
useful, most of them have never left the laboratory
(Kotseruba et al., 2016). The importance of extracting
the correct problem is given through an example in
the project VKT GOEPL (Wendt et al., 2012). The
purpose was to develop a decision support system for
the collaboration between agencies to protect critical
infrastructure in case of an earthquake. It should
answer queries like "how many hospital beds are
available within 10 km radius from the epicentre?" A
cognitive architecture only make sense, if there are
several competing methods to answer the question.
Another problem is that although cognitive
architectures claim to be very general, they tend to be
highly tailored to a certain problem. As an industrial
application is often very specific, the cognitive
architecture must not be too specialized, in order to
cover the required functionality. For instance, SiMA
models the human mind with high detail according to
a model derived from psychoanalysis. Compared to a
generic architecture like SOAR, SiMA contains much
pre-programmed functionality. In the project ECABA
(Zucker et al., 2016), the idea was to apply SiMA with
minimal changes to a problem in automated building
control. The SiMA model assumes that a drive is
independent. Because the proposed drives of the
building controller are interdependent, a workaround
with bad benefit/cost ratio had to be used.
SOAR and BDI use a minimal cognitive cycle. If
an industrial application has a need for an attentional
functionality, which filters relevant from non-
relevant content like in SiMA or LIDA, it may not be
possible to use these architectures because an
attentional mechanism is not a part of their concepts.
Perhaps, it is possible to implement this functionality
with high effort. General-purpose architectures,
which are more general problem solvers often lack
the flexibility needed for a certain application.
4 THE COGNITIVE PROCESS
To be able to use the potential of cognitive systems in
industrial applications, the shortcomings described
previously have to be addressed. The method
proposed in this paper is to create a meta-architecture
that consists of a common cognitive process, which
executes customized functions. According to (Wendt,
2016), a general cognitive process can be extracted
and common cognitive architectures can be mapped
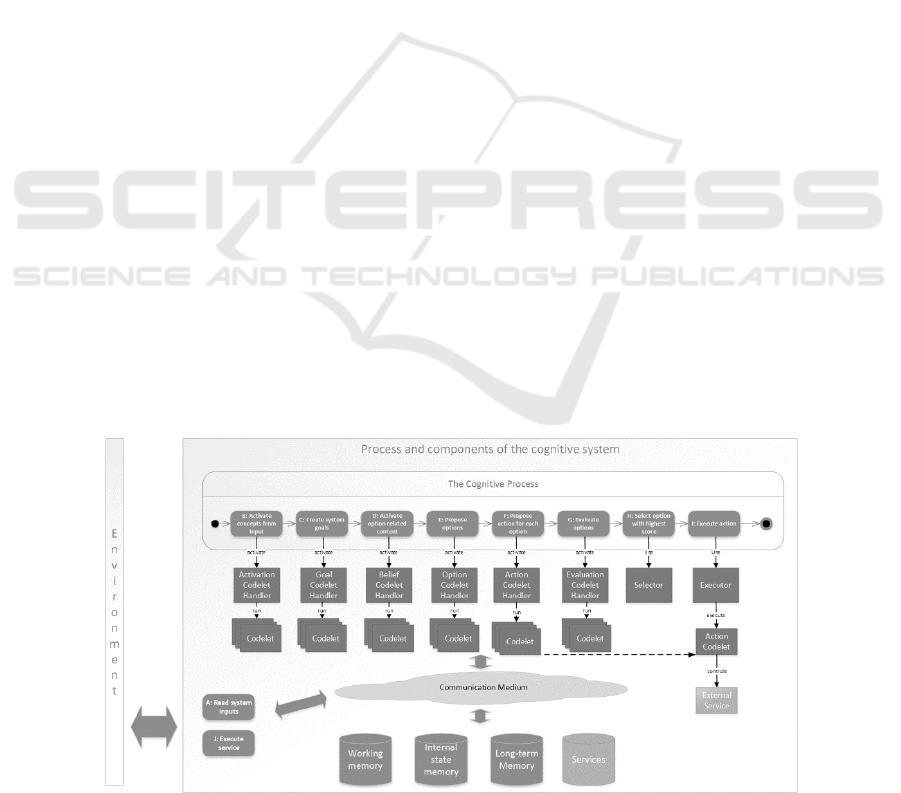
Figure 1: The cognitive process.
to it. In this paper, the idea is to use a modified version
of that process.
Figure 1 shows an overview. The cognitive
process describes one cognitive cycle, i.e. the path
from input to an action. In the following, each step is
described:
The first step is to "perceive" the input data (A:
Read system input), which can be a user request in an
application. It corresponds to the neural layer in
SiMA that contains raw data. Sensor data is
transformed into the internal representation (B:
Activate Concepts from Input). A knowledge base is
used to classify the data and to load the matching
symbol. No additional reasoning is performed. It
corresponds to the Perceptual Associative Memory of
LIDA or the Perceptual Buffer in ICARUS.
Then, the activated symbols are enhanced with
inferred knowledge. System goals (C: Create System
Goals) are activated by the sensor content if they are
not predefined. In addition, inferred knowledge about
the environment is activated (D: Activate Option
Related Content). Belief templates are tested and
beliefs are instantiated in a working memory. Implicit
knowledge is made explicit. In SiMA, the system
goals are drives, which rely on sensor data from its
body. In BDI, desires are tested against the beliefs
that originated from the sensor data (steps C and D
are swapped).
Based on the beliefs and the goals, ways of
fulfilling the system goals are proposed (E: Propose
options). These options define what the system is able
to do. They may contain possible actions that the
system can execute. In some applications, this step
may be optional if the options are equal to the actions
(F: Propose Action for each Option). Options can
also be interpreted as directives that can be fulfilled
by actions. In SOAR, operators and in BDI, intentions
are proposed. In LIDA, the options are presented
through coalitions of attention codelets with the
beliefs. All cognitive architectures have some means
to evaluate the proposed options, in order to rank
them (G: Evaluate Options). There are two sorts of
evaluations: Degree of goal fulfilment and the effort.
In SiMA, a rich set of evaluation methods is used.
Options are evaluated against the drives, the feelings
Usage of Cognitive Architectures in the Development of Industrial Applications - Utilization of a General Cognitive Process in the Domain
Building Automation
643
and the effort. Other methods used by e.g. SOAR is
the usage of preferences for certain operators like
"operator1 is better than operator2".
Through evaluation, options receive a score. One
option is selected based on its score (H: Select Option
with Highest Score). In the architectures SiMA and
LIDA, a second cognitive process would start to
develop a plan for each option. An action that is
associated with the option is executed (I: Execute
Action). It can be an action that alters the state of the
environment or an action that alters the internal state
of the system itself. In SOAR, that is what the
operators are doing. They only alter the internal state
of the working memory. An external action is
transformed into actuator commands, in order to
make a change in the system environment (J: Execute
Actuator Command).
Architectures like SOAR and BDI execute the
described process once, while due to an attentional
mechanism SiMA and LIDA executes it twice. The
winning option is further developed into detailed
plans.
5 TRANSFORMATION INTO A
COGNITIVE ARCHITECTURE
In case of a reactive system, the cognitive process can
be implemented straightforward. In the general case,
however, a deliberative system is applied, which
needs multiple cognitive cycles to decide about an
action. Figure 2 shows the architecture.
In most cognitive architectures, the execution of
actions is sequential. While an external action is an
action that alters the state of the environment, an
internal action only alters the internal state. For
instance, if data is loaded from a long-term memory,
it does only change the internal state. It may be
necessary to execute multiple internal actions before
an external action is executed. The key to handle this
is to keep track of the system's own decisions in a
working memory to know what has already been done
in a sequence of actions.
The system needs functions. In LIDA, the concept
of codelets was introduced. A codelet is a small piece
of code that executes independently on the content of
the working memory, e.g. to test sensor data and
activate an internal representation in the Perceptual
Associative Memory. Inspired by LIDA, codelets will
be implemented as the functions of the system. They
wait for a trigger to start. All codelets are assigned a
process step in Figure 1. The idea is that instead of
having fixed functions in the architecture, every
function is a codelet that can be added or removed, in
order to allow complete customization of the
cognitive process.
Every architecture needs memories. The long-
term memory can be in any format, e.g. an ontology
or a relational database, depending on the purpose of
the system. Through the codelets, its content is loaded
and converted into the internal representation. The
internal representation is defined in two memories:
the working memory and the internal state memory.
In the working memory, all content, which is relevant
for the current situation is stored, similar to SOAR. It
keeps actual instances of input data, data from the
long-term memory and data, which is generated
through codelets. In the internal state memory, only
decision-making relevant data like goals and options
is kept. It makes sense to separate the memories as
one of them only handles meta-data, which is linked
to the real data.
Figure 2: The general cognitive architecture that implements the cognitive process.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
644
6 THE APPLICATION KORE
Building Energy Management Systems (BEMS)
monitor and control the operation of the building
systems to maintain acceptable indoor comfort levels
under the constraint of energy efficiency. For the
control of these systems, automated decisions are
made using a control logic, which consists of a set of
rules defined by an expert. These rules are static or
updated during a re-commissioning phase. To reduce
the engineering effort, the focus in the project KORE
(Cognitive Optimization of Control Strategies for
Increasing Energy-efficiency in Buildings) (Zucker et
al., 2016) is to automatically generate and propose
rule-sets to the building operator.
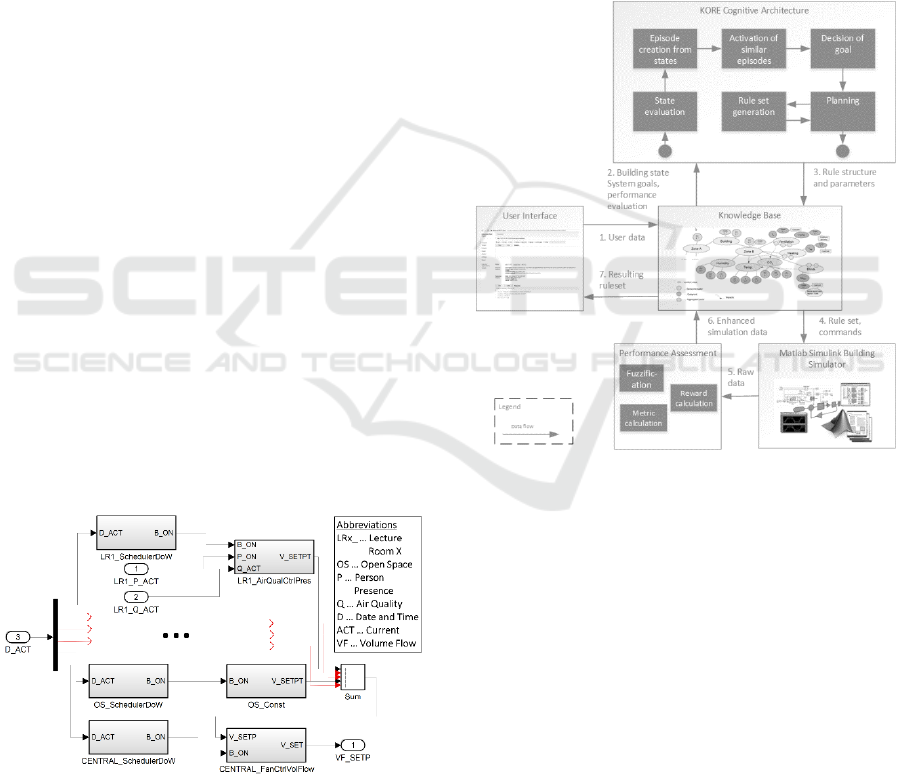
A rule-set is defined as a parameterized set of
interconnected control blocks like the example in
Figure 3. A control block is function of the building,
e.g. an actuator for a heating element or a CO
2
sensor.
Defined control blocks are instantiated in Matlab
Simulink. A Simulink model is then used to simulate
the rule-sets within a virtual building and get
feedback on how well they performed.
The task of the KORE application is to
automatically generate rule-sets, test them, evaluate
them and decide about the best method to continue
the optimization process. The system consists of three
components: A cognitive system for rule-set
generation, a simulator to test the generated rule-sets
and an ontology to store test results as well as
building information. The ontology is the long-term
memory of the cognitive system. An algorithm inside
of the cognitive system does the rule-set generation.
It arranges predefined control blocks corresponding
to a problem definition, which are later
parameterized.
Figure 3: Example of a rule structure in KORE.
There are three parts of information used. The
problem definition consists of the building structure,
the environmental setup, e.g., the season of the year
to be tested, and user requirements regarding comfort
and energy. The problem definition is stored in an
ontology, which has been created by domain experts.
The available utilities include a collection of
available control blocks and semantic knowledge.
The solution space consists of rules, generated by
interconnecting and parameterizing the available
control blocks. A further concept used is the episode.
It is the evaluation of a particular generated and tested
rule structure and parameters. Each episode is
evaluated regarding the fulfilment of the system
goals, i.e., energy efficiency, comfort and penalty that
describes the fulfilment of external rules applied to
the system.
Figure 4: The process of the KORE Application.
The process of the KORE application is visualized
in Figure 4. The process steps are described with the
numbers 1 to 7. It starts with a user request, which
contains the problem description address, the season
to optimize and the evaluation criteria (1 in Figure 4).
The problem description is enriched with information
stored in the knowledge base and is sent as input to
the cognitive system (2). First, the system retrieves
episodes from similar problems to find matching rule-
sets, using case-based reasoning. Rule-sets that
resulted in episodes with high returns have higher
probabilities of being selected by the system as
potential solutions in the future. The cognitive system
provides options to start rule generation from scratch
or to vary parameters of existing episodes. The
generated rule-structure (3) is sent to the building
simulator (4). It is returned as raw data to an evaluator
Usage of Cognitive Architectures in the Development of Industrial Applications - Utilization of a General Cognitive Process in the Domain
Building Automation
645
that adds the evaluations as meta-data (5). The
episode is stored in the ontology (6). Then, the
process starts over again or returns to the user if a
rule-set satisfies the input conditions (2), (7).
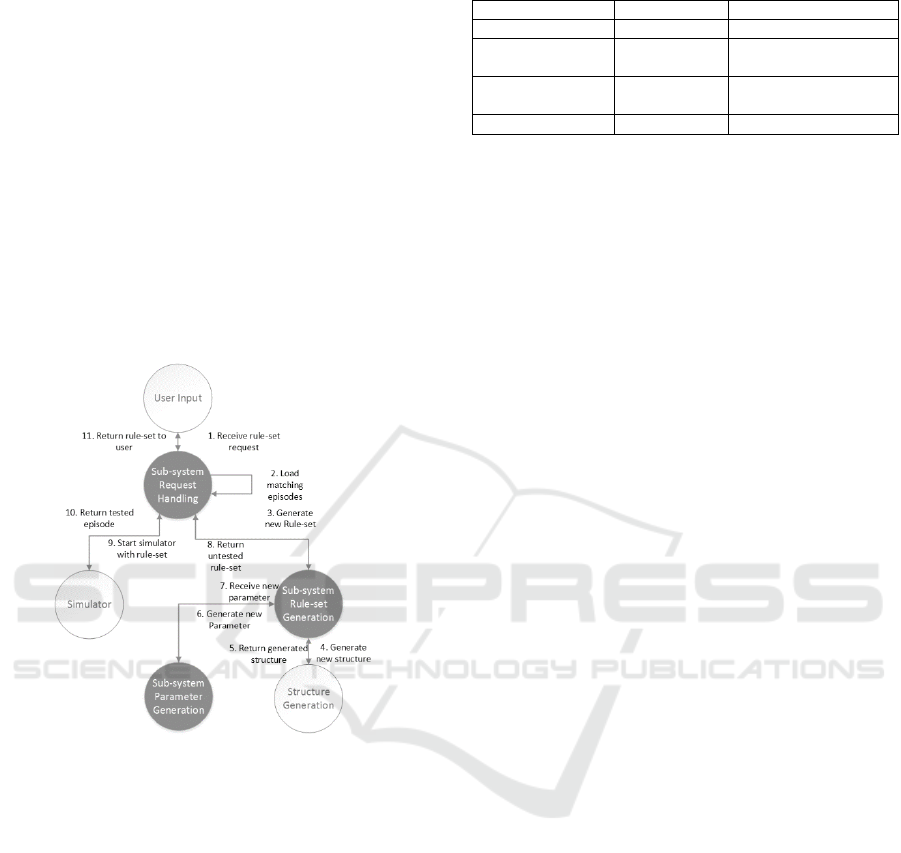
7 IMPLEMENTATION OF KORE
he cognitive process is to the architecture in Figure 4.
The main problem is divided into subsystems. They
are marked with a dark colour in Figure 5. Each
subsystem is defined as a separate cognitive problem.
In this paper, one exemplary subsystem will be
presented to show how a cognitive process is applied
outside of the standard uses like robots and artificial
life simulators.
Figure 5: Subsystems of the KORE application.
7.1 Subsystem Request Handling
When a user request is received by the subsystem
<Subsystem Request Handling>, the system must
select among existing episodes. The fulfilment of the
request by highest evaluated episode is the goal of the
system. In case the goal is not fulfilled, the second
best alternative is selected: to generate a new rule-set.
In Table 1, goals, options and actions of the
subsystem <Request Handling> are listed. Goals is
the fulfillment of a request, where <request
interrupted> is the more important goal. Actions are
predefined. The options are matched with the actions.
For each activated episode, an option is generated
<episode 1..n> that is connected to the action <return
episode>. In addition, an option is generated to
generate a new rule-set <new rule-set> with the action
<generate rule-set>.
Table 1: Overview of the subsystem Request Handling.
Goals
Options
Actions
request fullfilled
episode 1..n
return episode
request
interrupted
new rule-set
generate rule-set
untested rule-
set
test rule-set
interruption
Generated, untested rule-sets return to the
<Request Handling> as <untested rule-set>
connected to the action <test rule-set>.
7.2 Software Implementation
In (Wendt and Sauter, 2016), the ACONA framework
for implementing cognitive architectures in the Java-
based multi-agent platform Jade was presented. On
the lowest level, Jade agents are located. To allow
synchronous calls like reading a value from another
agent while blocking the method, having multiple
behaviours running in parallel and to get more control
over the external communication, the ACONA
framework adds a layer on top of Java Jade.
ACONA introduces cell functions, which allow
remote procedure calls for functions in other agents
and the communication is completely separated from
the function logic. Each agent also receives a memory
with the structure of datapoints for Json strings, in
order to provide a flexible internal representation.
Processes are implemented as codelet handlers,
where a codelet handler is an engine, which runs
codelets. In Figure 2, the setup is shown. The top
process is a codelet handler, where the processes steps
of the cognitive process are also codelet handlers.
Each process step allows customized codelets to be
executed. With this software setup, a flexible and
highly customizable cognitive system has been
designed.
7.3 Test Results
A request is provided through a RESTful web service
to the <Request Handling Subsystem>. A request
consists of CO
2
, energy and penalty requirements.
The system is demonstrated with two requests:
<Request 1> and <Request 2>. The goal conditions to
fulfil is an evaluation in the range [0, 1] of CO
2
,
energy and penalty, In <Request 1>, all conditions are
set to 0.9. In <Request 2>, they are 0.5. In Figure 6,
dashed lines show the request conditions.
For beliefs, a memory loader is triggered that
loads only the metadata of episodes, which perfectly
matches the scenario to be tested. Three episodes
match the two requests. Their evaluations are shown
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
646

with filled lines in Figure 6. After option codelets
have generated one option for each activated episode
and an additional option to generate a new rule-set,
evaluation codelets look for goal conditions and the
evaluations in the episodes and add them to the total
evaluation of that particular option. Each option has a
current state and a next state. Action codelets match
each option with a precondition state and a
postcondition state and adds a proposed action to the
matching option.
Figure 6: Evaluation of episodes regarding CO2, energy
and penalty criteria.
After evaluation, the option with the highest score
is selected. The results have been visualized in Figure
7. For <Request 1>, the option <GenerateRule> was
selected, which means that no loaded episode fulfilled
the requirements of the request. All evaluations are
negative because they do not match the requirements.
Therefore, a new rule-set and episode have to be
generated. However, an interesting effect occurs if the
possibility to generate new rules is removed. The
system always execute the action of the best option
and in such a case an episode would be returned
although it does not fulfill the requirement.
In <Request 2>, the requirements were lowered to
0.5 each and the option <OptionEpisode2> was
selected as it had the best rank. The corresponding
action was to return the rule-set of that episode to the
user.
Figure 7: Evaluation of available options for two requests.
8 DISCUSSION
A general cognitive process was extracted based on
the analysis of common cognitive architectures. It
should make it easier to apply cognitive architectures
in industrial applications. The most important task is
to find the suitable problem, i.e. problems, where a
system has several competing options to choose from.
The cognitive architecture has to be very flexible to
be applied to industrial applications specialized for
only one task. The more specialized a cognitive
architecture gets, the harder it is to implement without
violating the underlying cognitive model. The
cognitive process was turned into a general cognitive
architecture that allows more customization as all
functions are defined as codelets. Codelets enhance
and modify existing concepts in the working memory
in a deliberative way.
The implementation shows that an architecture
can be quickly setup and extended through codelets.
Another advantage is that every codelet can be
separately tested by unit tests, as the system is "open"
to injections into the working memory and the
internal state memory. It is easy to integrate new
actions or option types with low effort.
A drawback noticed, which is common for all
rule-based cognitive architectures, is that with
increasing possibilities, the complexity of the system
rises because codelets are generally interdependent.
For instance, if new ways of evaluations are added,
perhaps it makes the system unbalanced, which
results in selecting the "wrong" option.
As future work, the architecture will be adapted
and applied in the area of Industry 4.0 within the
project Self-Aware health Monitoring and Bio-
inspired coordination for distributed Automation
systems (SAMBA). Apart from the decision-making
module, the architecture includes other two modules
for error detection and communication with other
agents for distributed decision-making. The challenge
here is to adapt the system in a distributed
environment, therefore to exhibit collective
behaviour that will be able to pursue the goals of the
larger system. However, because the cognitive
process is general enough, the effort for
transformation in another domain is expected to be
kept low.
As the common cognitive cycle can be extracted
from the studied cognitive architectures, a perfect
validation would be to implement an existing
cognitive architecture with all specialized functions.
Besides, of the cognitive process, the key to
implementing an architecture would be to create the
proper state machine, which is correctly represented
0
0,2
0,4
0,6
0,8
1
Co2
EP
Episode Evaluation
Epsiode1 Episode2
Episode3 Request 2
Request 1
1,075
1,8
0,35
1
0 0,5 1 1,5 2
1
Option Evaluation Request 2
GenerateRule OptionEpisode3
OptionEpisode2 OptionEpisode1
-0,025
-0,03
-0,75
1
-1 -0,5 0 0,5 1 1,5
1
Option Evaluation Request 1
GenerateRule OptionEpisode3
OptionEpisode2 OptionEpisode1
Usage of Cognitive Architectures in the Development of Industrial Applications - Utilization of a General Cognitive Process in the Domain
Building Automation
647

within the internal state memory. SiMA, which has
much specialized cognitive functionality would be
suitable for such a test.
ACKNOWLEDGEMENTS
We gratefully acknowledge the financial support
provided to us by the BMVIT and FFG (Austrian
Research Promotion Agency) under the KORE
project (848805).
REFERENCES
Anderson, J.R., Bothell, D., Byrne, M.D., Douglass, S.,
Lebiere, C., Qin, Y., 2004. An integrated theory of the
mind. Psychol. Rev. 111, 1036.
Choi, D., Kang, Y., Lim, H., You, B.-J., 2009. Knowledge-
based control of a humanoid robot, in: Intelligent
Robots and Systems, 2009. IROS 2009. IEEE/RSJ
International Conference On. IEEE, pp. 3949–3954.
Crowder, J.A., Carbone, J.N., Friess, S.A., 2014. Artificial
cognition architectures. Springer.
Dietrich, D., Zucker, G., 2008. New approach for
controlling complex processes. An introduction to the 5
th generation of AI, in: Human System Interactions,
2008 Conference On. IEEE, pp. 12–17.
Dignum, F., Westra, J., van Doesburg, W.A., Harbers, M.,
2009. Games and agents: Designing intelligent
gameplay. Int. J. Comput. Games Technol. 2009.
Franklin, S., Patterson Jr, F., 2006. The LIDA architecture:
Adding new modes of learning to an intelligent,
autonomous, software agent. pat 703, 764–1004.
Gobet, F., Lane, P.C., 2010. The CHREST architecture of
cognition: The role of perception in general
intelligence, in: Procs 3rd Conf on Artificial General
Intelligence. Atlantis Press.
Gottifredi, S., Tucat, M., Corbatta, D., García, A.J., Simari,
G.R., 2008. A BDI architecture for high level robot
deliberation, in: XIV Congreso Argentino de Ciencias
de La Computación.
Heinze, C., Goss, S., Pearce, A., 1999. Plan recognition in
military simulation: Incorporating machine learning
with intelligent agents, in: Proceedings of IJCAI-99
Workshop on Team Behaviour and Plan Recognition.
pp. 53–64.
Kotseruba, I., Gonzalez, O.J.A., Tsotsos, J.K., 2016. A
Review of 40 Years of Cognitive Architecture
Research: Focus on Perception, Attention, Learning
and Applications. ArXiv Prepr. ArXiv161008602.
Langley, P., Choi, D., Trivedi, N., 2011. Icarus user’s
manual. Inst. Study Learn. Expert. 2164.
Langley, P., Laird, J.E., Rogers, S., 2009. Cognitive
architectures: Research issues and challenges. Cogn.
Syst. Res. 10, 141–160.
Ramamurthy, U., Baars, B.J., SK, D., Franklin, S., 2006.
Lida: A working model of cognition.
Sandsmark, M.T.H., Viktil, K.B.M., 2012. Jantu: A
Cognitive Agent Playing StarCraft: Brood War.
Institutt for datateknikk og informasjonsvitenskap.
Schaat, S., Jager, W., Dickert, S., 2017. Psychologically
Plausible Models in Agent-Based Simulations of
Sustainable Behavior, in: Agent-Based Modeling of
Sustainable Behaviors. Springer, pp. 1–25.
Vernon, D., Metta, G., Sandini, G., 2007. A survey of
artificial cognitive systems: Implications for the
autonomous development of mental capabilities in
computational agents. IEEE Trans. Evol. Comput. 11,
151–180.
Wendt, A., 2016. Experience-Based Decision-Making in a
Cognitive Architecture. TU Vienna, TU Vienna
University Library.
Wendt, A., Dönz, B., Mantler, S., Bruckner, D., 2012.
Evaluation of Database Technologies for Usage in
Dynamic Data Models. pp. 219–224.
Wendt, A., Gelbard, F., Fittner, M., Schaat, S., Jakubec, M.,
Brandstätter, C., Kollmann, S., 2015. Decision-making
in the cognitive architecture SiMA, in: Technologies
and Applications of Artificial Intelligence (TAAI), 2015
Conference On. IEEE, pp. 330–335.
Wendt, A., Sauter, T., 2016. Agent-Based cognitive
architecture framework implementation of complex
systems within a multi-agent framework, in: Emerging
Technologies and Factory Automation (ETFA), 2016
IEEE 21st International Conference On. IEEE, pp. 1–
4.
Zucker, G., Wendt, A., Siafara, L., Schaat, S., 2016. A
cognitive architecture for building automation, in:
Industrial Electronics Society, IECON 2016-42nd
Annual Conference of the IEEE. IEEE, pp. 6919–6924.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
648
