
Real-time Image Registration with Region Matching
Charles Beumier and Xavier Neyt
Signal and Image Centre, Royal Military Academy, Avenue de la Renaissance 30, 1000 Brussels, Belgium
Keywords: Image Registration, Region Segmentation, Connected Component Labeling, Region Descriptors.
Abstract: Image registration, the task of aligning two images, is a fundamental operation for applications like image
stitching or image comparison. In our project in surveillance for route clearance operations, a drone will be
used to detect suspicious people and vehicles. This paper presents an approach for real-time image
alignment of video images acquired by a moving camera. The high correlation between successive images
allows for relatively simple algorithms. We considered region segmentation as an alternative to the more
classical corner or interest point detectors and evaluated the appropriateness of connected component
labeling with a connectivity defined by the gray-level similarity between neighboring pixels. Real-time
processing is intended thanks to a very fast segment-based (as opposed to pixel-based) connected
component labeling. The regions, even if not always pleasing the human eye, proved stable enough to be
linked across images by trivial features such as the area and the centroid. The vector shifts between
matching regions were filtered and modeled by an affine transform. The paper discusses the execution time
obtained by this feasibility study for all the steps needed for image registration and indicates the planned
improvements to achieve real-time.
1 INTRODUCTION
Image registration, a very important field of image
processing and computer vision, is the task of
aligning pictures, a fundamental step for applications
like image stitching, medical image alignment or
camera motion compensation.
Images are usually registered by intensity-based
matching or feature-based pairing (Zitova and
Flusser, 2003; Goshtasby, 2005). The common
intensity-based matching consists in image patch
cross-correlation to find corresponding areas in both
images, a time consuming process due to the large
space of search (image dimension and transform
parameters). The feature-based approach consists in
extracting in both images remarkable points, lines or
contours and in pairing them. The small memory
need and computational load of the latter approaches
have given rise to many successful and efficient
methods like SIFT (Lowe, 2004) and ORB (Rublee
et al., 2011).
We are currently active in a European Defence
Agency project of the Research and Technology
programme IEDDET for countering Improvised
Explosive Devices (EDA, 2017). It addresses the
topic of future route clearance operations for which
an early warning phase is in charge of pre-screening
the area to highlight any suspicious presence of
people or vehicles. To realize this, a test area will be
flown over by an Unmanned Aerial Vehicle
equipped with visible and thermal infra-red cameras.
The thermal camera has been selected for its
capacity to detect individuals and vehicles thanks to
its temperature sensitivity while the visible camera is
more appropriate for image registration.
For image registration, we propose to match
uniform regions as an alternative to the more
classical corners or interest points. Due to the
similarity of images taken from a sequence, regions
can provide for several simple and robust features,
obtained with little development and for small
computational effort. They can bring geometrical
and radiometric information or mix local (contour)
and regional characteristics. They also represent a
useful description for object tracking, after image
registration.
Real-time responses in the context of security or
rapid processing in the case of automatic detection
in hours of video footage impose fast algorithms.
For the sake of estimating local shift between
images to be registered, most fast approaches detect
interest points and match them across images (Lowe,
Beumier, C. and Neyt, X.
Real-time Image Registration with Region Matching.
DOI: 10.5220/0006655304390445
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
439-445
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
439

2004; Rublee et al., 2011). Many works preferred to
optimize the image intensity comparison of local
areas (blocks). For instance (Puglisi and Battiato,
2011) relied on efficient integral projections while
(Kim et al., 2008) limited the number of blocks and
sub-blocks to be analyzed, and estimated the best
correlation from the number of matching edge points
in sub-blocks. A more recent trend for acceleration
consists in exploiting parallel computing from the
central or graphics processing unit (Zhi et al., 2016;
Shamonin et al., 2014). In this work we planned to
explore the region approach in terms of speed,
registration potential and code simplicity.
The rest of the paper first outlines the
methodology in section 2, then details how images
are segmented into regions in section 3, and how
these are matched in order to model the image
transform for registration, subject of section 4.
Registration results are presented in Section 5 and
time figures are discussed for this feasibility study
and for the planned developments with the suggested
improvements. Section 6 draws conclusions and
outlines our future work.
2 METHODOLOGY
We were motivated to show that for image
registration, region extraction and matching is a valid
alternative to the traditional feature-based approaches
in terms of speed and precision, and this for a
software implementation easy to code and control.
Our development is based on the segmentation of
images into regions thanks to a very fast detection of
connected components. Instead of considering pixel
connectivity, horizontal segments are first detected
thanks to a fast horizontal connectivity check. Then
the vertical connectivity is used to link segments.
The representation of regions exploits directly the
segments and is coded as a list of segment leftmost
and rightmost x coordinates. This representation
allows for memory compactness and very fast
computation of classical geometrical features.
With such a speed for region segmentation, the
difficulty for choosing a threshold can be alleviated
by testing several threshold values for the reference
image (done once) and for the images to be
registered. The number of regions can be used as
selection criterion but some applications may prefer
to use all detected regions (for all thresholds tested).
In this feasibility study, only one threshold was
necessary, due to the high correlation of images
taken from a short sequence.
The regions extracted in images are matched by
features so that provisional shift vectors (Dx,Dy) are
collected all over the image. These vectors are
filtered and modeled by an affine transform. This
image transform made of 6 coefficients is used to
align the image to the reference so that image
differencing can highlight objects in motion.
3 IMAGE SEGMENTATION
The segmentation of images follows the approach of
connected component labeling, with a connectivity
rule based on the gray-level difference of
neighboring pixels. The implementation employs an
efficient representation of regions by segments to
offer speed and to optimize memory accesses and
size.
3.1 Connected Component Labeling
Connected Component Labeling, the process of
assigning a unique label to each group of connected
pixels, is usually applied to binary images. Refer to
(Grana et al., 2010) and (Lacassagne and
Zavidovique, 2011) for a detailed review of
pioneering and recent approaches.
Most algorithms use a 2-pass procedure that first
finds connected pixels and marks them with a
provisional label, storing possible equivalence of
labels when branches with different labels meet.
They then scan the image a second time to give a
final label, result of equivalence resolution.
The improvements brought to this general
approach concern the way the equivalence of labels
is resolved, how memory accesses are optimized to
reduce memory cache misses and how much
conditional statements are minimized to avoid
stalling the processing pipeline in RISC computers.
One of the fastest published methods on RISC
architectures is called LSL (Light Speed Labeling,
Lacassagne and Zavidovique, 2011) and consists in
the storage of foreground regions (in a binary image)
as run length codes (RLC) and not as an image. It is
exactly the way we improved our pixel-based
segmentation by connected component. The very
good results and thorough evaluation of LSL make
us confident that once our development for segment-
based (RLC) image segmentation will be finalized, it
will offer a fast and valid solution, as preliminary
tests already showed.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
440

3.2 Pixel Connectivity
Two pixels are considered connected if they touch
(in 4- or 8-Neighbor connectivity) and if their gray-
level difference complies to some rule. We adopted
a constant threshold. This definition for connectivity
allows regions to climb or descend hills of limited
slopes to form large areas that are bordered by edges
with a minimum contrast.
The choice for the threshold is crucial to avoid a
myriad of useless small regions or a reduced set of
very large areas. For speed reasons, we did not
choose for an adaptive solution with varying
threshold, such as the Maximally Stable Extremal
Regions (Matas et al., 2002). Region growing
methods usually perform non-contiguous memory
accesses that may result in cache misses. Instead, we
observed that 256-level images are well segmented
with a fixed threshold value between 2 to 8,
depending on the edge strengths. Values 3 or 4 are
often appropriate values.
One good threshold value can be obtained
automatically from a rough estimation of the
gradient histogram. Alternatively our fast
segmentation algorithm can be run several times to
select the best threshold when matching two images,
or even to use all obtained regions (for all
thresholds) if more candidates are needed. Mention
that the images in the sequences are captured within
a short time interval and from a similar point of
view. A threshold good for one image is likely to be
fine for the others.
3.3 Region Detection
As soon as two pixels are connected horizontally, a
segment is initiated by storing the first x position
into the array of segments xT. The x position of the
last horizontally connected pixel of this segment is
stored in the next value of xT. The array xT is filled
progressively during the image scan from top to
bottom. Thanks to the increasing addresses of the
accesses to the image and xT, memory cache misses
are minimized.
At the beginning of each row during the scan
process, the index of the first free value in xT is
stored in a small table yT that contains h (image
height) elements. This table offers a simple way to
access the segments of any image line and in
particular the line preceding the currently processed
one. yT also gives a compact and inexpensive way
to keep the y position of a segment without
explicitly storing y values for each segment.
3.4 Region Labeling
Subsection 3.3 explained horizontal connectivity.
The vertical connectivity is checked with stored
segments (xT) of the previous image line. Again,
memory accesses are efficient as xT values of the
previous line are probably still in the cache. As
shown in Figure 1, a new segment S may link
segments with different labels Li, when for instance
two or more branches get connected. This calls for
label equivalence and its resolution.
All segments of the first image line receive a
unique label assigned in increasing order. From the
second line, a comparison is made between segment
ends of the current line and the previous one to see if
a label can be propagated. Since xT values are
increasing along each image line, the comparison
between segments of two consecutive lines is done
efficiently. For a label to be propagated from
segment L on line y-1 to segment S freshly detected
on line y, there must exist at least one pixel from L
touching one pixel of S, with a gray-level difference
under the threshold.
Figure 1: Segment labeling for new segment S with
equivalences for L1, L2 and L3.
Several label propagation cases may happen. If
there is no segment L touching S, a new (increasing)
label is given to S. If there is just one, its label is
assigned to S. If there are several segments L, all the
corresponding labels Li have to be connected in an
equivalence table.
The equivalence table contains the provisional
final label (called parent) for each label. Each table
entry (label) is initialized with its table index. Once
equivalences are found, the minimum value (so, the
oldest assigned one) of the parent labels of all labels
connected by segment S is used as new parent label
for all connected labels.
At the end of the image scan, all segments are
found and compactly stored in the xT array and
easily accessed line by line thanks to the yT array. A
label array called labT (indexed by simplicity the
same way as xT, or half its index to gain some
memory) contains the segment provisional label
values. To resolve equivalences, the table values are
replaced by their parent label and compacted since
non-parent labels become useless. labT values are
updated accordingly so that at the end, the remaining
Real-time Image Registration with Region Matching
441
regions have the minimum number of labels from 1
(0 is reserved for no_region) to the number of
regions, by order of appearance when scanning the
image.
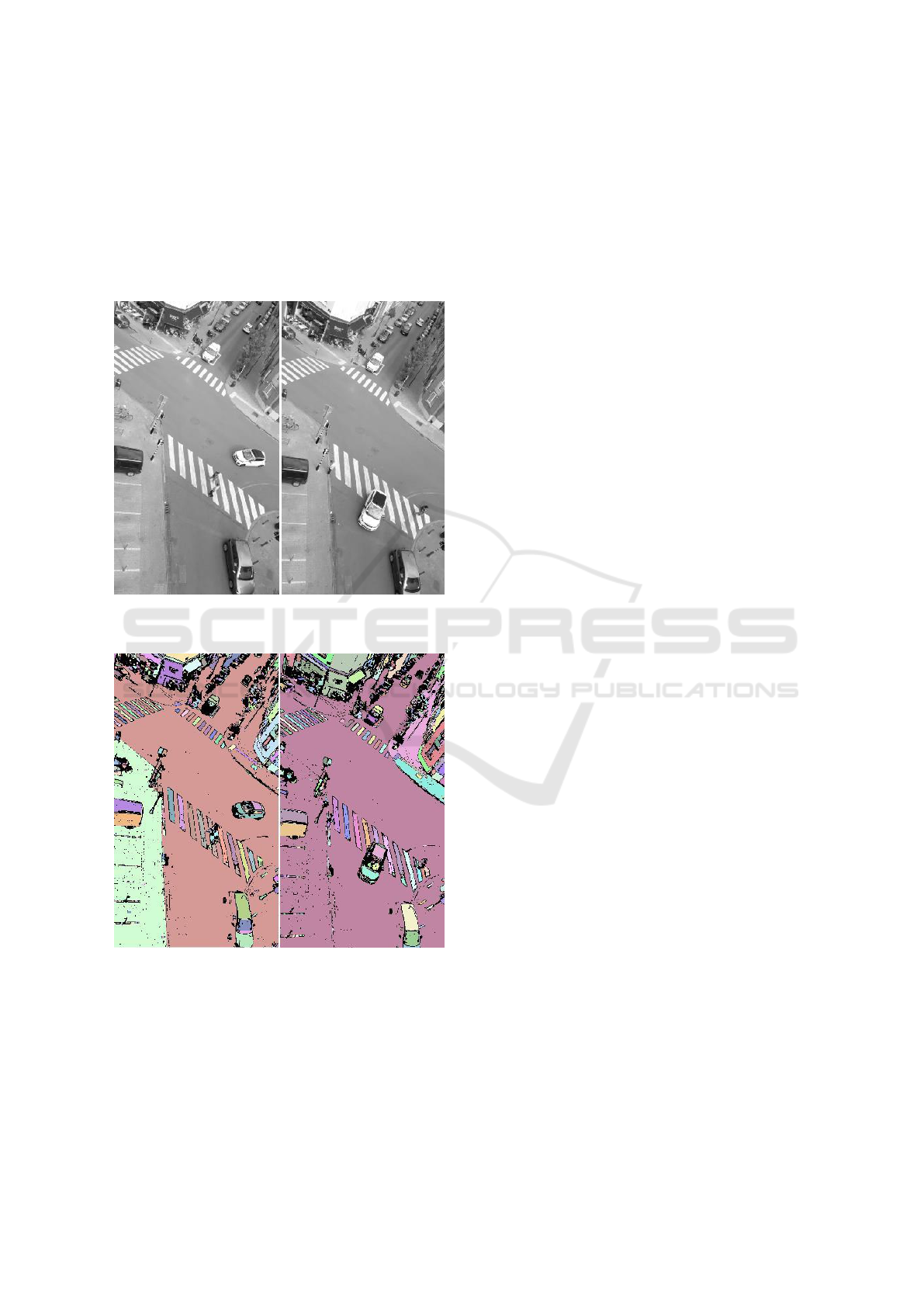
Figure 3 shows the result of image segmentation
into regions for two images of the sequence
separated by 4 seconds of Figure 2.
Figure 2: Two images of a sequence separated by 4
seconds.
Figure 3: Region extraction and labeling for the reference
image and the image to register.
4 IMAGE REGISTRATION
Image registration is realized by a 4-step procedure.
First, features are extracted for the regions detected
during image segmentation. Secondly, region
features of an image pair are compared to identify
possible matches. Each match defines a shift vector
(Dx,Dy), probable displacement of a region. Thirdly,
shift values are used to fit an affine transform
modeling the local shift all over the image. Finally,
the image to register is warped by the affine
transform to be aligned to the reference.
4.1 Region Features
Several region features are easily and efficiently
extracted from the way regions are stored as a
collection of segments. The most direct feature is the
area in pixels, computed very quickly for all regions
by scanning once xT, and summing the segment
lengths for each region. Region x and y value
averages, also accelerated by the segment-oriented
representation with xT and yT, give the centroid
coordinates Cx, Cy and offer a robust localization
for regions.
Like the first order moment Cx and Cy, the 2
nd
order moments Mxx, Mxy, Myy, physically related
to inertia, can be efficiently computed. They also
directly lead to the maximum and minimum inertia
axes, and give a hint to the region orientation. Other
easy geometrical features are the bounding box and
the region contour, with possible corner detection.
These last features should be included when regions
are not numerous or when the centroids are not
sufficiently precise, usually for medium or large size
regions.
Aside from these geometrical characteristics,
some obvious radiometric values can be rapidly
evaluated (e.g. minimal and maximal gray values,
average, standard deviation).
4.2 Region Matching
In this feasibility study, we implemented feature
matching by a direct comparison of only two
features (area, centroid position) with quite a large
tolerance. The first image of a sequence is taken as
reference to register any of the following images,
one at a time.
Two regions of similar area (up to 10%
difference) constitute a matching pair if their
centroid lies within a distance D, by default set to
1/10 of the image largest dimension.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
442

Figure 4: Selected shift vectors.
The shift vectors (Dx,Dy) between matching
regions centroids are collected to later derive a
motion vector field. Even with the current
elementary region matching with two features, a
dominant peak clearly appears in the 2-D histogram
of (Dx,Dy). The distribution around this peak
corresponds to the dependence of the local shift
values with image position since the camera
movement may induce a perspective transformation
or rotation. In our tests, the false candidates due to
wrong matches were distributed sparsely in the
histogram and did not challenge the dominant peak.
The selected shift vectors after histogram peak
selection are shown in Figure 4. A majority of
vectors are coherent in size and direction.
We will have to evaluate in practice, for limited
movements corresponding to fast frame rates (10 or
25 Hz), and depending on drone motion patterns, if
we need to consider multiple peaks, for instance for
the case of a strong rotation. One possible
implementation then consists in dividing the frames
into tiles in which the local apparent motion is closer
to a translation, resulting in a dominant peak if there
are enough matching regions in the tile and few
moving objects.
If the precision of Dx or Dy from the centroids is
not sufficient, other points may be searched for,
either from the region contours, or from the gradient
peaks near region borders.
4.3 Shift Modeling
The candidate list of (Dx,Dy) values was restricted
in the previous subsection to the histogram peak
since the area feature (and the maximal centroid
distance D) was not constraining enough to filter out
most of the false matches. To further fight against
erroneous shift estimations but also to compensate
for the possible lack of shift values in some image
area and to capture the dependence of shift values
with image position, a global model for (Dx,Dy) is
looked for in terms of the image coordinates. We
opted for an affine transform:
X = Ax+By+C
(1)
Y = Dx+Ey+F
(2)
where x,y are the coordinates of the image to be
registered and X,Y are the reference image
coordinates.
The coefficients of (1) and (2) are currently
estimated by least mean squares with the function
getAffineTransform from the openCV library. As
this function is called from our C program with a
process launching Python, shift modeling represents
a slow step in the current implementation of this
feasibility study.
4.4 Image Warping
An image warping operation is applied to register an
image of the sequence to the reference image. This
operation typically scans the result frame to write
the bilinear interpolation of 4 pixels from the source
surrounding the coordinates projected by the inverse
transformation of equations (1) and (2).
Although easy in concept, this operation is slow
(40 msec for a 2 Mpixel image) since all image
pixels are considered.
5 RESULTS AND DISCUSSION
The main goal of the presented research is to offer
camera motion compensation. Figure 5 shows the
difference between a registered image and the
reference. We see that the correction is globally fine.
Real-time Image Registration with Region Matching
443

A residual error of 2 or 3 pixels exists in some areas.
This is mainly due to the approximated localization
of regions by their centroid. An approach based on
region contours would be more precise but is not
necessarily needed as for the detection of large and
fast moving objects.
Figure 5: Difference between the reference and the
registered images.
A second objective of our development is to
offer fast processing. We intend to analyze the video
flow in real-time or to process stored sequences as
fast as possible. This is less of a challenge with
nowadays computers, but the standard image
resolution has increased.
For this feasibility study we recorded sequences
with a Samsung A5 (2016) in the MPEG 1080p
format. Each image has 1920 x 1080 pixels (2
Mpixel). The given execution times were obtained
by a computer equipped with an Intel i5-4590 at 3.3
GHz (27 Gb of RAM), using a single core.
Table 1 gives an overview of the current and
prospected execution time for the different steps of
the proposed registration approach in the case of 2
Mpixel images.
Table 1: Timing figures for a 2 Mpixel image.
Processing
Current [ms]
Prospected [ms]
(Pre-processing)
(20)
(20)
Segmentation
140
15
Region Features
1
5
Region Matching
2
10
Shift Modeling
100
10
Image Warping
40
20
Total
283 (+20)
60 (+20)
Some pre-processing might be needed, for
instance in the case of noisy images. We have
indicated an optional time of 20 ms to account for
simple low-pass filtering or equivalent processing.
Our implementation for this feasibility study
used a pixel-based region segmentation that runs in
about 140 ms. The segment-based version, not yet
finalized, currently detect similar regions in less than
15 ms. This impressive timing is comparable to
published works about connected component
labeling from binary images (Grana et al., 2010),
considering that gray-level comparison needs extra
work. Only the regions with a pixel count in the
range of 50 to 5000 pixels were kept. For the
considered sequence, this represents more than 500
regions.
The computation of features used in section 4
(area and centroid) is really fast (less than 1 ms)
thanks to the storage of regions as a list of segments.
We will explore additional features to increase the
region discriminative power. Some extra time has
been foreseen in Table 1 for possibly more
computationally demanding features.
Feature matching is also very fast (about 2 ms in
our tests). About 3000 matching candidates were
reduced to roughly 200 ones by the histogram peak
selection. The impact on time for increasing the
number of features is quite difficult to estimate since
more discrimination will speedup histogram
processing.
The estimation of the affine transform is a
bottleneck in the current implementation because it
relies on a Python library called as a separate
process from a C program. About 100 ms are
required to find the model coefficients thanks to
roughly 200 vectors (Dx,Dy), from which about half
will be rejected during refinement. Due to the large
proportion of valid region pairs, the solution can
benefit in execution time from a RANSAC
procedure (Fischler and Bolles, 1981). From
preliminary tests we believe in a 10 times speedup
compared to the current implementation.
The current warping operation by the affine
transform is also a heavy step (about 40 ms), since
all pixels are processed and require the access of 4
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
444

neighbors for bilinear interpolation. A possible
speedup for motion detection applications consists in
warping first at a lower resolution, and/or with the
nearest neighbor pixel, and to apply warping at full
resolution only where differences with the reference
are significant at low resolution.
According to Table 1, if we target an application
with 2 Mpixel image sequences, 60 ms (or 80 with
pre-processing) are likely to be needed for all the
processing steps. At a rate of 10 images per second,
40 ms (or 20) are left to handle moving object
detection and tracking, a task possibly helped by the
available regions extracted for image registration.
6 CONCLUSIONS
We presented a feasibility study for real-time image
registration that exploits fast image segmentation
into regions based on pixel connectivity along and
across horizontal segments. These segments form a
compact representation of the regions, appropriate
for the fast extraction of classical features such as
the area, the centroids and the 2
nd
order moments.
According to preliminary tests, video sequences
of 2 Mpixel images can be registered at 3 Hz. Based
on the discussion about identified slow operations,
the same sequences are likely to be registered and
analyzed for object tracking at 10 Hz.
Some refinements and improvements mentioned
in the discussion of section 5 are our future concern.
We will first finalize the segment-based region
extraction algorithm. We will then analyze the
potential of additional region features and adapt
region matching accordingly. We will look for
another model fitting algorithm, directly callable
from C. And finally, we will test other sequences,
and evaluate the influence of parameters.
ACKNOWLEDGEMENTS
We would like to thank the Belgian MoD and in
particular the Royal Higher Institute for Defence for
supporting this research.
REFERENCES
Zitova, B., and Flusser, J. (2003). Image registration
methods: a survey. Image Vision Computing 21, pages
977-1000.
Goshtasby, A. (2005). 2-D and 3-D Image Registration,
for Medical, Remote Sensing and Industrial
Applications. Wiley Press.
Lowe, D. (2004). Distinctive Image Features from Scale-
Invariant Keypoints. International Journal of
Computer Vision, 60 (2):91-110.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). ORB: an efficient alternative to SIFT or
SURF. In IEEE International Conference on
Computer Vision (ICCV), pages 2564-2571.
EDA, (2017). EDA programme launched to improve IED
Detection. https://www.eda.europa.eu/info-hub/press-
centre/latest-news/2017/01/12.
Puglisi, G., and Battiato, S. (2011). A Robust Image
Alignment Algorithm for Video Stabilization
Purposes. IEEE Transactions on Circuits and Systems
for Video Technology, 21 (10):1390-1400.
Kim, N.-J., Lee, H.-J., and Lee, J.-B. (2008). Probabilistic
Global Motion Estimation Based on Laplcian Two-Bit
Plane Matching for Fast Digital Image Stabilization.
EURASIP Journal on Advances in Signal Processing,
Volume 2008, pages 1-10.
Zhi, X., Yan, J., Hang, Y., and Wang, S. (2016).
Realization of CUDA-based real-time registration and
target localization for high-resolution video images.
Journal of Real-Time Image Processing, May 2016,
pages 1-12.
Shamonin, D., Bron, E., Lelieveldt, B., Smits, M., Klein,
S., and Staring, M. (2014). Fast parallel image
registration on CPU and GPU for diagnostic
classification of Alzheimer’s disease. Frontiers in
Neuroinformatics, Vol 7.
Grana, C., Borghesani, D., and Cucchiara, R. (2010).
Optimized Block-based Connected Components
Labeling with Decision Trees. IEEE Transactions on
Image Processing, 19(6):1596-1609.
Lacassagne, L., and Zavidovique, B., (2011). Light Speed
Labeling. Journal of Real-Time Image Processing,
6(2):117-135.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2002).
Robust wide baseline stereo from maximally stable
extremal regions. In British Machine Vision
Conference 2002, pages 384-393.
Fischler, M., and Bolles, R. (1981). Random sample
consensus: a paradigm for model fitting with
applications to image analysis and automated
cartography. Communications of the ACM, 24(6):381-
395.
33545395.395.
Real-time Image Registration with Region Matching
445
