
Cylindric Clock Model to Represent Spatio-temporal Trajectories
Joanna Isabelle Olszewska
School of Engineering and Computing, University of West Scotland, U.K.
Keywords:
Spatial and Temporal Reasoning, Reasoning about Motion and Change, Ontologies of Time and Space-time,
Temporal Information Extraction, Spatio-temporal Knowledge Representation Systems.
Abstract:
To automatically understand agents’ environment and its changes, the study of spatio-temporal relations be-
tween the objects evolving in the observed scene is of prime importance. In particular, the temporal aspect is
crucial to analyze scene’s objects of interest and their trajectories, e.g. to follow their movements, understand
their behaviours, etc. In this paper, we propose to conceptualize qualitative spatio-temporal relations in terms
of the clock model and extend it to a new spatio-temporal model we called cylindric clock model, in order to
effectively perform automated reasoning about the scene and its objects of interest and to improve the mod-
eling of dynamic scenes compared to state-of-art approaches as demonstrated in the carried out experiments.
Hence, the new formalisation of the qualitative spatio-temporal relations provides an efficient method for both
knowledge representation and information processing of spatio-temporal motion data.
1 INTRODUCTION
The study of spatio-temporal information such as
the computation and analysis of scene objects’ tra-
jectories has been proven to be of a major chal-
lenge for real-world applications involving the reli-
able and automatic understanding of a sensed envi-
ronment where agents evolve, whatever their level of
autonomy. Hence, a wide range of tasks from traffic
monitoring (Yue and Revesz, 2012), video summa-
rization (Cooharojananone et al., 2010), action pre-
diction (Young and Hawes, 2014), activity recogni-
tion (Sun et al., 2010; Zhang et al., 2013) to robot
path planning (Dash et al., 2012) and UAV navigation
aid (Kalantar et al., 2017) require efficient models to
represent spatio-temporal trajectories.
In particular, joint navigation in commander/robot
teams (Summers-Stay et al., 2014; Olszewska, 2017a)
needs both reliable, quantitative spatio-temporal data
and efficient, qualitative spatio-temporal models, in
order to generate objects’ paths.
In the literature, objects’ trajectories are usually
computed by quantitative methods that at first iden-
tify objects’ motion with computer-vision techniques
such as optical flow (Min and Kasturi, 2004), and then
build the related trajectories applying statistical mod-
els such as clustering (Zheng et al., 2005), local prin-
cipal component analysis (Beleznai and Schreiber,
2010), or Bayesian networks (Zhang et al., 2013).
Despite the effectiveness of these approaches, their
grounded representation does not allow natural lan-
guage processing or automated reasoning about them.
On the other hand, some qualitative knowledge-
based methods (Ligozat, 2012) have been developed
to analyze the qualitative motion of objects, e.g. us-
ing interval temporal relations (Gagne and Trudel,
1996). Other state-of-art approaches focus on the ob-
ject’s path consistency check, based on simple spa-
tial relations such as left, right, behind of, in front
of (Kohler et al., 2004), cardinal directions (Brehar
et al., 2011), or qualitative temporal interval models
(Belouaer et al., 2012). However, these existing qual-
itative temporal models do not provide a fully inte-
grated spatio-temporal model and rely only on lim-
ited, qualitative spatial concepts.
Hence, in this work, we aim to integrate the time
notion within natural-language meaningful, qualita-
tive spatial relations such as the clock model (Ol-
szewska, 2015) to built a complete and coher-
ent spatio-temporal model we called cylindric clock
model for both quantitative and qualitative analysis
of scene objects’ kinematics.
Our cylindric clock model thus leads, on one hand,
to the cylindrical representation of the motion and
paths of the objects of interest belonging to the sensed
scene, rather than the traditional box representation
(Beleznai et al., 2006). Therefore, our approach al-
lows a new and user-friendly representation of static
Olszewska, J.
Cylindric Clock Model to Represent Spatio-temporal Trajectories.
DOI: 10.5220/0006649605590564
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 2, pages 559-564
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
559
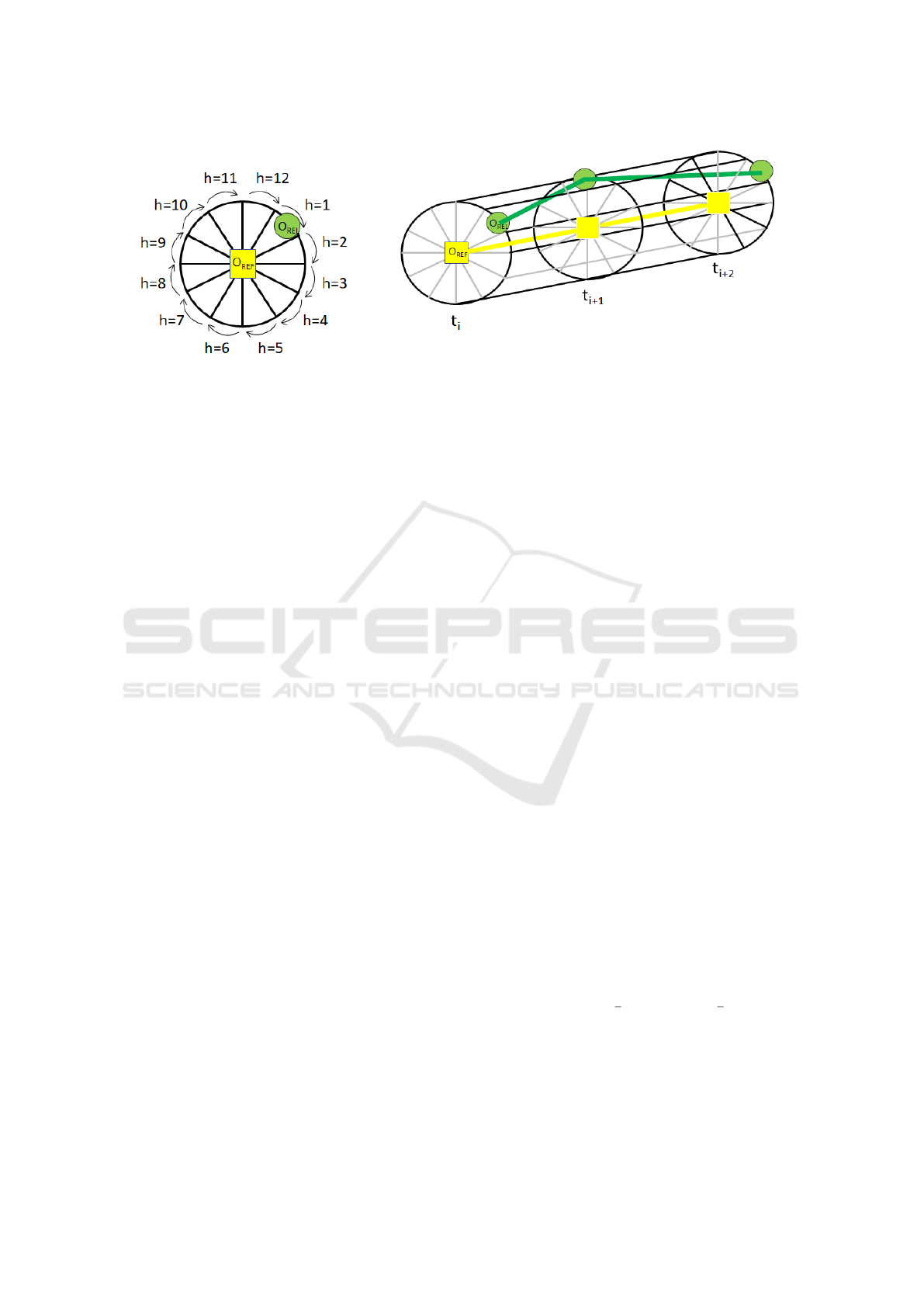
(a) (b)
Figure 1: Overview of (a) the spatial clock model; (b) the spatio-temporal cylindric clock model.
and dynamic objects within the observed scene. On
the other hand, our model conveys both quantitative
and qualitative spatio-temporal knowledge about the
scene objects as well as provides additional spatio-
temporal information, such as the semantic elucida-
tion of the relations between objects’ positions and
their change in time.
Thence, in the cylindric clock model, objects’
trajectories are represented in a three-dimensional
(2D+1) space, with (r,θ) spatial dimensions and the
(t) time dimension, unlike the two-dimensional repre-
sentations with (x,t) coordinates (Bennett et al., 2008),
(Zhang et al., 2013).
As in (Barber and Moreno, 1997), we represent
continuous change in the spatio-temporal space with
discrete time. However, our temporal segmenta-
tion of the space-time scene provides a novel tem-
poral model consisting in cylindrical segments rather
than the state-of-the-art linear time intervals (Allen,
1983; Halpern and Shoham, 1991), branching tem-
poral structures (Bolotov and Dixon, 2000), or time
points (Kowalski and Sergot, 1986; Dean and McDer-
mott, 1987).
We validated our cylindric clock model by apply-
ing it to camera-acquired, spatio-temporal data. It
is worth noting the model allows to process spatio-
temporal data obtained by any sensor recording the
scene and the objects of interest’s motion.
The main contribution of this work is the repre-
sentation of object’s trajectory by means of qualitative
spatio-temporal relations; in particular, its formaliza-
tion as a cylindric clock model. Furthermore, this
model leads to a new conceptualization of the Time
in terms of cylindrical segments.
The paper is structured as follows. In Section 2,
we present our qualitative spatio-temporal model we
called cylindric clock model. This proposed method
has been successfully tested on real-world datasets as
reported and discussed in Section 3. Conclusions are
drawn up in Section 4.
2 PROPOSED APPROACH
The proposed cylindric clock model is a 2D + 1
spatio-temporal model, where the 2D space of the
scene is divided into 12 parts (h) as per spatial clock
model (Olszewska, 2015) mapping the clock face as
illustrated in Fig. 1(a), and where the t time space is
discretized into i temporal instants (i.e. t
i
, t
i+1
, etc.)
represented as cylindrical segments (see Fig. 1(b)).
Hence, we formalise the cylindric clock model C
as follows:
C = C
t
i
∨ ... ∨C
t
j
, (1)
where t
i
and t
j
are the temporal instants when the
observation of the scene starts and stops, respectively,
with t
i
< t
j
, and where C
t
i
is a spatial relation between
two objects of interest, namely, the reference object
O
REF
and the relative sought object O
REL
, present in
the 2D view of the scene at the instant t
i
:
C
t
i
= R(O
REF
, O
REL
)
t
i
, (2)
with R a 2D, directional, clock-based spatial rela-
tion such as hCK, with h ∈ {1, 2, .., 12} and h ∈ N.
For example in Fig. 1, the clock-modeled relation
between O
REF
and O
REL
at the instant t
i
and in the
t
i
2D view has the semantic meaning of the natural-
language expression is at 1 o’clock and is represented
by the hCK relation, with h = 1, as follows:
hCK
t
i
= {(r
t
i
, θ
t
i
)|
π
6
+ 2kπ < θ
t
i
≤
π
3
+ 2kπ,
k ∈ N, h = 1},
(3)
where (r
t
i
, θ
t
i
) are the polar coordinates in the 2D
view of the observed scene at the instant t
i
, where r
t
i
is the radius or distance d
t
i
between O
REF
and O
REL
in the t
i
2D view, and with θ
t
i
the polar angle between
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
560
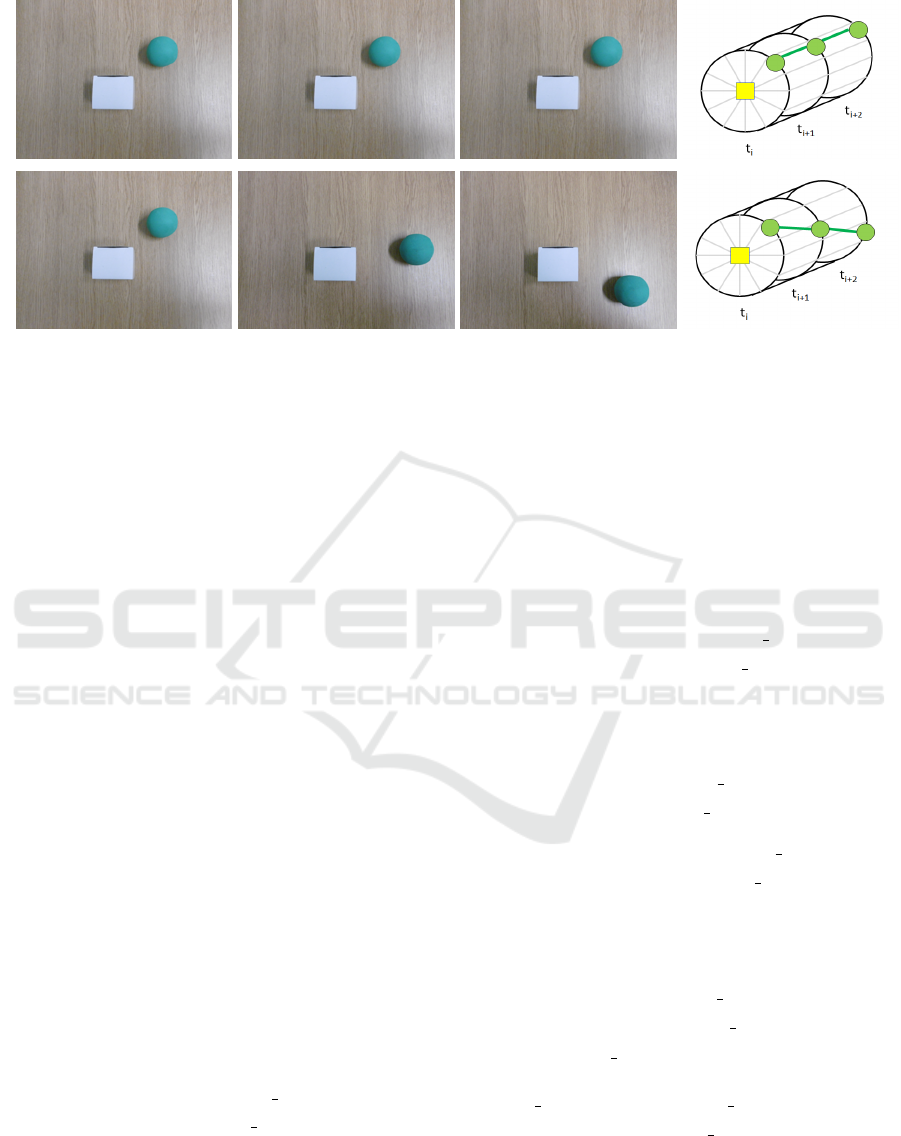
(a) (b) (c) (d)
Figure 2: Results samples for an observed scene with O
REF
(static white box) and O
REL
(green ball). Columns: (a)-(c) frames
of the scene captured at instants t
i
, t
i+1
, and t
i+2
, respectively; and (d) the resulting cylindrical temporal segments and O
REL
path represented by means of the spatio-temporal cylindric clock model. Rows: (1st) static O
REL
; (2nd) dynamic O
REL
.
the horizontal axis and the line determined by O
REF
and O
REL
in the t
i
2D view.
The trajectory P of the object of interest could be
thus defined as:
P = {R
t
i
, ..., R
t
j
, with i, j ∈ N, i < j}, (4)
for the object of interest’s path from instant t
i
to t
j
within the observed scene and taking into account the
definitions in Eqs. 2-3.
Unlike (Meyer and Bouthemy, 1993), we do not
assume the continuity of the object’s velocity. There-
fore in our model, the O
REL
objects could be static or
dynamic or both, assuming O
REF
is always static.
If the O
REL
object is static within a period of ob-
servation of the scene [k, p], with k ∈ N, k < p and
p 6= 0, or if the O
REL
object stops moving for a period
of time between instants k and p, then we can express
the static path P
s
⊆ P, as follows:
P
s
≡ {∃k, p, R
t
k
= R
t
k+1
= ... = R
t
p
}; (5)
otherwise, O
REL
object is dynamic, in which case
we can formalize the dynamic path as P
d
⊆ P, with:
P
d
≡ {∃l, R
t
l
6= R
t
l+1
with l ∈ N
0
}. (6)
Furthermore, we define the hasMoved ontological
concept using Description Logics (DL) (Baader et al.,
2010), as follows:
hasMoved v Temporal Relation
v Spatial Relation
u ∃O
REF
u ∃O
REL
u ¬isStatic,
(7)
where isStatic is defined in terms of Eqs. 5-6.
As appearance and/or disappearance of objects of
interest from the scene (Olszewska, 2017b) is an im-
portant issue for the continuity of the global trajectory
of the objects (Meyer and Bouthemy, 1993), we in-
troduce the hasAppeared and hasDisappeared on-
tological notions in our model with temporal DL (Ar-
tale and Franconi, 1999), as follows:
hasAppeared(@t
i
) v Temporal
Relation
v Spatial Relation
u ∃O
REF
u ∃O
REL
u (t
i−1
)(t
i
)(t
i−1
< t
i
)
· (¬has hCK@t
i−1
u has hCK@t
i
),
(8)
hasDisappeared(@t
i
) v Temporal Relation
v Spatial Relation
u ∃O
REF
u ∃O
REL
u (t
i−1
)(t
i
)(t
i−1
< t
i
)
· (has hCK@t
i−1
u ¬has hCK@t
i
),
(9)
where the has hCK(@t
i
) ontological concept is in-
troduced as follows:
has hCK(@t
i
) v Temporal Relation
v Spatial Relation
u ∃O
REF
u ∃O
REL
u (t
i
)
· ∃(1CK t ... t 12CK)@t
i
.
(10)
Cylindric Clock Model to Represent Spatio-temporal Trajectories
561

It is worth noting that in both cases, i.e. when an
object of interest appears or disappear from a scene,
this leads to dynamic trajectories as defined in our
cylindric clock model by Eq. 6.
3 EXPERIMENTS AND
DISCUSSION
To evaluate the performance of our spatio-temporal
model, our relations introduced in Section 2 have
been implemented within the STVO ontology (Ol-
szewska, 2011), using Prot
´
eg
´
e software and FACT++
automated reasoner.
Both development and experiments have been run
on a computer with Intel(R) Pentium (R) CPU N3540,
2.16 GHz, 4Gb RAM, 64-bit OS.
In our experiments on reasoning with our 2D+1
relations about real-world scenes, we merged two
datasets, one from the work of (Olszewska, 2015) for
static objects’ paths, and one with mixed static and
dynamic trajectories of objects of interests. Samples
of the datasets and corresponding results have been
presented in Fig. 2.
In particular, the global dataset is composed of
top views of camera-acquired scenes with two to five
objects of interests evolving in a real-world environ-
ment, leading to 1214 possible spatio-temporal re-
lations in between two different objects, one static
(O
REF
) and one static and/or dynamic (O
REL
). On the
other hand, this entire dataset has also a ground-truth
file attached to it, where the semantic spatio-temporal
relations have been identified by three humans for
cross-validation purpose and described with the cor-
responding poll-winning result. As an example, the
spatial description corresponding to Fig. 2(a) is ‘the
green ball (O
REL
) is 1CK (right above) the white box
(O
REF
)’, while the one related to Fig. 2(c) (2nd row)
is ‘the green ball (O
REL
) has moved to 3CK (right be-
low) the white box (O
REF
)’.
Table 1: Performance of our proposed approach for object’s
move detection (experiment 1) and trajectory building (ex-
periment 2), when using state-of-art methods (*) (Beleznai
et al., 2006), (**) (Belouaer et al., 2012), and (our) cylin-
dric clock model, respectively. The presented rates are the
mean average values.
state-of-the-art our approach
experiment 1 93% * 99.4%
experiment 2 97%** 98.2%
The first carried-out experiment consists in detect-
ing O
REL
objects evolving in the recorded scenes, as
illustrated in Fig. 2. For this purpose, we compared
our algorithm’s performance in terms of standard de-
tection rate with a traditional computer-vision based
method (Beleznai et al., 2006).
We can observe in Table 1 that our approach out-
performs the state-of-art quantitative technique. In-
deed, our average detection rate over the entire dataset
is of 99.4%, allowing the detection of both static and
dynamic objects of interest. Moreover, our system al-
lows to perform automated reasoning about the scene
objects of interest.
In the second experiment, we applied our method
to the dataset images in order to build consistently the
related trajectories of the detected objects with our al-
gorithm.
Examples of the results obtained when building
objects’ trajectories within spatio-temporal space are
presented in Fig. 2 for both static and dynamic objects
of interest.
We observe that a static object follows a linear tra-
jectory within our model, whereas dynamic objects’
trajectories are of an helical type.
For the experiment 2, we compared our ap-
proach’s performance in terms of the accuracy of the
built trajectory with the the qualitative method (Be-
louaer et al., 2012) using well-established time inter-
vals.
As reported in Table 1, our overall mean aver-
age accuracy rate across the dataset for the different
scenes and objects of interest is of 98.2%, outper-
forming the results obtained by using existing qual-
itative temporal models (Belouaer et al., 2012), while
our cylindric clock model provides the object’s path
within few milliseconds.
Hence, these values obtained in both cases by our
model demonstrate excellent scores and outperform
the state-of-art ones, in both accuracy and computa-
tional efficiency. Moreover, our cylindric clock model
provides meaningful natural-language interpretation
of the spatio-temporal relations in between the ob-
jects of interest and allows both numeric and seman-
tic description of their trajectories. Hence, our system
could be used in real-world applications for the nav-
igation of autonomous systems and/or multiple con-
versational agents.
4 CONCLUSIONS
In this work, we proposed new, qualitative spatio-
temporal relations leading to the cylindric clock
model, which allows the 2D+1 representation of the
trajectories of objects evolving in an observed scene,
where the time is conceptualized in terms of cylin-
drical segments. Experiments in real-world con-
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
562

text demonstrate the effectiveness and usefulness of
our approach compared to state-of-the-art techniques.
Thus, our model could be applied to intelligent sys-
tems for multiple agents and/or autonomous systems’
navigation and guidance aid.
REFERENCES
Allen, J. (1983). Maintaining knowledge about temporal
intervals. Communications of the ACM, 26(11):832–
843.
Artale, A. and Franconi, E. (1999). Introducing temporal
description logics. In Proceedings of the IEEE Inter-
national Workshop on Temporal Representation and
Reasoning (TIME), pages 2–5.
Baader, F., Calvanese, D., McGuinness, D. L., Nardi, D.,
and Patel-Schneider, P. F. (2010). The Description
Logic Handbook: Theory, Implementation and Appli-
cations. Cambridge University Press, 2nd. edition.
Barber, F. and Moreno, S. (1997). Representation of con-
tinuous change with discrete time. In Proceedings of
the IEEE International Symposium on Temporal Rep-
resentation and Reasoning (TIME), pages 175–179.
Beleznai, C., Fruhstuck, B., and Bischof, H. (2006). Multi-
ple object tracking using local PCA. In Proceedings of
the IEEE International Conference on Pattern Recog-
nition (ICPR), pages 79–82.
Beleznai, C. and Schreiber, D. (2010). Multiple ob-
ject tracking by hierarchical association of spatio-
temporal data. In Proceedings of the IEEE Interna-
tional Conference on Image Processing (ICIP), pages
41–44.
Belouaer, L., Bouzid, M., and Mouhoub, M. (2012). Dy-
namic path consistency for spatial reasoning. In Pro-
ceedings of the IEEE International Conference on
Tools with Artificial Intelligence (ICTAI), pages 1004–
1009.
Bennett, B., Magee, D., Cohn, A., and Hogg, D. (2008).
Enhanced tracking and recognition of moving objects
by reasoning about spatio-temporal continuity. Image
and Vision Computing, 26(1):67–81.
Bolotov, A. and Dixon, C. (2000). Resolution for branch-
ing time temporal logics: Applying the temporal reso-
lution rule. In Proceedings of the IEEE International
Symposium on Temporal Representation and Reason-
ing (TIME), pages 163–172.
Brehar, R., Fortuna, C., Bota, S., Mladenic, D., and Nede-
vschi, S. (2011). Spatio-temporal reasoning for traffic
scene understanding. In Proceedings of the IEEE In-
ternational Conference on Intelligent Computer Com-
munication and Processing, pages 377–384.
Cooharojananone, N., Kasamwattanarote, S., Satoh, S., and
Lipikorn, R. (2010). Real-time trajectory search in
video summarization using direct distance transform.
In Proceedings of the IEEE International Conference
on Signal Processing, pages 932–935.
Dash, T., Mishra, G., and Nayak, T. (2012). A novel ap-
proach for intelligent robot path planning. In Proceed-
ings of the AIRES Conference, pages 388–391.
Dean, T. and McDermott, D. (1987). Temporal data base
management. Artificial Intelligence, 32(1):1–55.
Gagne, D. and Trudel, A. (1996). A topological transi-
tion based logic for the qualitative motion of objects.
In Proceedings of the IEEE International Symposium
on Temporal Representation and Reasoning (TIME),
pages 176–181.
Halpern, J. and Shoham, Y. (1991). A propositional
modal logic of time intervals. Journal of the ACM,
38(4):935–962.
Kalantar, B., Mansor, S. B., Halin, A. A., Shafri, H. Z. M.,
and Zang, M. (2017). Multiple moving object detec-
tion from UAV videos using trajectories of matched
regional adjacency graphs. IEEE Transactions on
Geoscience and Remote Sensing, 55(9):5198–5213.
Kohler, C., Ottlik, A., Nagel, H.-H., and Nebel, B. (2004).
Qualitative reasoning feeding back into quantitative
model-based tracking. In Proceedings of the Eu-
ropean Conference on Artificial Intelligence (ECAI),
pages 1041–1042.
Kowalski, R. and Sergot, M. (1986). A logic-based calculus
of events. New Generation Computing, 6795(4):217–
240.
Ligozat, G. (2012). Qualitative Spatial and Temporal Rea-
soning. John Wiley & Sons.
Meyer, F. and Bouthemy, P. (1993). Exploiting the temporal
coherence of motion for linking partial spatiotemporal
trajectories. In Proceedings of the IEEE International
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 746–747.
Min, J. and Kasturi, R. (2004). Extraction and temporal
segmentation of multiple motion trajectories in hu-
man motion. In Proceedings of the IEEE International
Conference on Computer Vision and Pattern Recongi-
tion Workshop (CVPR).
Olszewska, J. (2015). 3D Spatial reasoning using the clock
model. In Research and Development in Intelligent
Systems, volume 32, pages 147–154. Springer.
Olszewska, J. (2017a). Clock-model-assisted agent’s spa-
tial navigation. In Proceedings of the Interna-
tional Conference on Agents and Artificial Intelli-
gence (ICAART’17), pages 687–692.
Olszewska, J. (2017b). Detecting hidden objects using ef-
ficient spatio-temporal knowledge representation. In
Revised Selected Papers of the International Confer-
ence on Agents and Artificial Intelligence. Lecture
Notes in Computer Science, volume 10162, pages
302–313.
Olszewska, J. I. (2011). Spatio-temporal visual ontology. In
Proceedings of the BMVA-EACL Workshop on Vision
and Language.
Summers-Stay, D., Cassidy, T., and Voss, C. R. (2014).
Joint navigation in commander/robot teams: Dia-
log and task performance when vision is bandwidth-
limited. In Proceedings of the ACL International
Conference on Computational Linguistics Workshop
(COLING), pages 9–16.
Cylindric Clock Model to Represent Spatio-temporal Trajectories
563

Sun, J., Mu, Y., Yan, S., and Cheong, L.-F. (2010). Activity
recognition using dense long-duration trajectories. In
Proceedings of the IEEE International Conference on
Multimedia and Expo, pages 322–327.
Young, J. and Hawes, N. (2014). Effects of training
data variation and temporal representation in a QSR-
based action prediction system. In Proceedings of
the AAAI International Conference on Artificial Intel-
ligence (AAAI).
Yue, H. and Revesz, P. (2012). TVICS: An efficient traf-
fic video information converting system. In Proceed-
ings of the IEEE International Symposium on Tem-
poral Representation and Reasoning (TIME), pages
141–148.
Zhang, Y., Zhang, Y., Swears, E., Larios, N., Wang, Z., and
Ji, Q. (2013). Modeling temporal interactions with in-
terval temporal Bayesian networks for complex activ-
ity recognition. IEEE Transactions on Pattern Analy-
sis and Machine Intelligence, 35(10):2468–2483.
Zheng, J.-B., Feng, D. D., and Zhao, R.-C. (2005). Trajec-
tory matching and classification of video moving ob-
jects. In Proceedings of the IEEE Workshop on Multi-
media Signal Processing, pages 1–4.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
564
