
Designing Distributed Multi-Agent System for Aggregate and Final
Assembly of Complex Technical Objects on Ramp-up Stage
Petr Skobelev
2,3
, Valery Eliseev
1
, Igor Mayorov
1,3
, Vitaly Travin
2
,
Alexey Zhilyaev
1,2
and Elena Simonova
1,2
1
Smart Solutions, Ltd, Samara, Russia
2
Samara National Research University, Samara, Russia
3
Samara State Technical University, Samara, Russia
Keywords: Assembly Workshops, Planning and Scheduling, Distributed Problem Solving, Multi-Agent Technology,
Multi-Agent System, Adaptive Scheduling, Knowledge Base, Decision Making, Real-Time.
Abstract: The paper covers the problem of aggregate and final assembly of complex technical objects at the ramp-up
stage. New models, methods and tools for distributed scheduling are proposed, including modified version
of virtual market with new classes of agents. The new feature of multi-agent scheduler considers knowledge
base technology which helps to specify each operation in more detailed and individual way. The paper
describes first system prototype for adaptive planning at the ramp-up stage and the main directions of future
system development.
1 INTRODUCTION
The problem of production scheduling for
workshops of aggregate and final assembly of
complex technical objects is now often solved with
the help of classical models, methods and means of
production planning, such as SAP, BAAN, etc.
(Cox, 2000, Herrmann, 2006).
However, during development of new versions
of complex technical objects on ramp-up stage a
number of special problems can arise (Klocke,
2016):
• composition of the product and production
technology are finalized only during
assembly;
• failures in the work of suppliers (non-
compliance, non-delivery of parts or delay in
delivery);
• workers do not yet have the required
competencies;
• reassessment of labor productivity;
• unforeseen time spent on decision-making;
• urgent additional orders, etc.
As a result, significant delays occur in the plant's
operation, which are especially evident in aggregate
assembly workshops and at the final assembly line.
In this connection, this paper considers an
approach to designing a distributed multi-agent
system (MAS) for workshops of aggregate and final
assembly lines. This system is capable of flexibly
rearranging the work of assembly shops in case of
unforeseen events.
The first part of this paper covers the problem of
ramp-up production scheduling for complex
technical objects assembly. The second part
substantiates ways of solving the problem using the
knowledge base and multi-agent technology. The
third part provides a formalized formulation of the
planning task, based on maximizing the overall
satisfaction of agents in auction-like negotiations.
The fourth part describes the basic method of
adaptive agent planning and considers architecture
of the distributed multi-agent scheduling system.
The fifth part describes the architecture of the multi-
agent system and its components. The sixth part
demonstrates the possibility of using knowledge
base for adaptive planning. The conclusions propose
further steps for development of the system.
This project develops and advances the results of
the ARUM project under the EU Program "Factories
of the Future", during which the first prototype of
this kind of system was created (Leitão, 2013).
250
Skobelev, P., Eliseev, V., Mayorov, I., Travin, V., Zhilyaev, A. and Simonova, E.
Designing Distributed Multi-Agent System for Aggregate and Final Assembly of Complex Technical Objects on Ramp-up Stage.
DOI: 10.5220/0006636202500257
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 1, pages 250-257
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 DESCRIPTION OF THE
PROBLEM AND THE
PROPOSED APPROACH TO ITS
SOLUTION
The problem of forming schedules of the aggregate
and final assembly lines includes:
• formation of production schedules using
various criteria, preferences and constraints;
• forecast of the possibility of performing
schedules with available resources;
• adaptive re-scheduling of assembly in case of
unforeseen events in real time;
• identification of bottlenecks and resource re-
allocation between workshops;
• optimization of production schedule by
comparing options and initial conditions;
• control of implementation of production
schedules, etc.
Complexity of this processes is caused by NP-
hard nature of combinatorial search, nonlinearity of
decision making space, interdependences of
operations in technological processes, specific
individual features of matching rules for assigning
operations to resources, including competencies of
workers, and a number of other features.
Ramp-up stage is bringing additional complexity
by high dynamics of production, when various
events are constantly taking place: new orders are
emerging, composition of products is changing,
technological processes are being refined, supply
terms are broken, work centers fail or defects are
detected.
This complexity and high dynamics of
scheduling process, which is event-driven in this
case by definition, leads to the fact that traditional,
centralized, hierarchically organized, sequential
methods and algorithms of combinatorial type
cannot effectively solve this problem with
acceptable quality and within the required time for
practical applications in the workshops.
For practical solution of the problem the paper
proposes new distributed solution based on models,
methods and algorithms for adaptive scheduling
(Rzevski, 2014).
First of all, in this solution, instead of one "large"
central scheduler for aggregate and final assembly
shops, a distributed "system of systems" is proposed.
It is built as a multi-level network of "small" stand-
alone operational planners for individual workshops
with a plan horizon of up to a month, working in
coordination with the end-to-end scheduler of
aggregate and final assembly workshops with a
horizon of up to 3-6 months.
Secondly, to solve the problem of ramp-up
management, it is suggested to use multi-agent
technology which utilizes the concept of an "agent"
– an autonomous software object capable of
perceiving the situation, making decisions and
interacting with others (Skobelev, 2014). Solution of
any complex task in the multi-agent system is
formed by self-organization of agents through
interaction of dozens and thousands of agents of
demand-and-resource network (DR-network),
continuously competing and cooperating with each
other (Vittikh, 2003).
The schedule of workshops is created as a self-
organizing network of orders and resources,
adaptively changing depending on events in real
time. In the process of self-organization, software
agents of orders and resources search for each other,
at first choosing the best free options, and then
resolving conflicts until the system is balanced and
none of the options can improve the overall
performance of the system. Then the calculation
process stops, and the solution is given to the user.
This process more naturally describes the way
experienced managers and dispatchers usually form
schedules, finding a balance of interests among all
concerned parties. The transition from combinatorial
search for the optimal schedule to the search for an
"acceptable" (reasonable) schedule corresponding to
the current situation (reflecting the balance of
interests of orders and resources at the given
moment) allows to create quality schedules.
Thirdly, vitally important knowledge is need to
be accumulated when such systems are implemented
and used. However, this knowledge is often difficult
to formalize. It can be used to improve the quality of
planning, for example, information on the possibility
of parallelizing part of technological operations or
reinforcing them by adding more workers in order to
accelerate the work, or knowledge about the
competencies of workers, their compatibility in
shifts, etc.
For this purpose, the paper proposes using the
Knowledge Base (KB) for accumulation,
formalization and use of these parts of knowledge,
as storage of such knowledge is currently not
provided by any of the corporate systems. Such a
KB can be based on domain ontology as a semantic
network of classes of concepts and relations – a
technology that is actively developed within the
Semantic Web to describe the content of Internet
resources (Skobelev, 2012).
Designing Distributed Multi-Agent System for Aggregate and Final Assembly of Complex Technical Objects on Ramp-up Stage
251

Application of KB will make the developed
system open to users and allow them to customize
the resource matching and scheduling rules within
much wider limits than in traditional systems, to
adapt the system during its use, to reduce labor
intensity and the cost of operating the system.
3 FORMALIZED PROBLEM
STATEMENT OF SCHEDULING
BASED ON MULTI-AGENT
TECHNOLOGY
In the formal problem statement of managing the
production schedule, it is assumed that each of the
orders and resources has its own criteria, preferences
and limitations, and their importance can change
during execution of tasks, and the purpose of the
schedule is to find the maximum possible agreement
between these agents, taking into account
peculiarities of their current situation.
For this purpose, it is proposed to use multi-
agent technology to automate the processes of
identifying and resolving conflicts between agents of
orders placed in the common pool of resources.
Within the proposed multi-agent technology, the
problem of searching for a consensus can be
formulated through the notion of "satisfaction" of
agents of orders and resources, showing how much
the observed criteria for selecting solution options
differ from the ideal ones, given as wishes or based
on experience of practitioners (Mayorov, 2015).
The following list of agents is proposed for
building production schedules (Table 1).
Thus, the model of a manufacturing enterprise is
specified through a network of linked demands and
resources (DR-network), in particular, orders and
resources (relating to execution of work on
technological processes – operations and
transitions): resources are represented by assembly
stations, work centers, and workers of specific areas
of expertise. Orders at this level are production
assignments to workers for assembly of
technological assembly units (TAU) and assembly
units (AU). Further, larger structural subdivisions
are considered – sections, production shops with
sections and orders at the level of aggregate
assembly shops with corresponding inter-shop links.
At the top level, there is final assembly in the final
assembly shop with cooperation in adjacent
production and supply.
Table 1: The main classes of MAS agents and their
functions.
Agent class
Agent functions
Order agent
Selects the technological process (from
alternative ones), monitors the plan and
the fact
Technological
process agent
Plans tasks, monitors timeframes and
results obtained within the process
Division agent
Manages the load of employees within
divisions (shops, stations, workers)
Task agent
Searches for the best worker according
to the list of competencies and conforms
the terms of task fulfillment, monitors
its execution
Resource agent
Plans tasks suitable for the employee or
equipment, monitors the load and
results
Product agent
Evaluates the results, does not allow for
idling
Enterprise
agent
Finds and corrects bottlenecks in plans
and analyzes risks
In the proposed approach, each department of
assembly production at the level h (assembly line,
workshop, enterprise a s a whole) is given specific
types of agents of resources, tasks, operations,
technical processes, products (TAU and AU), the
state of which is described through functions of
satisfaction u
res h
j
by indicators (criteria functions) i
from the set {x
i
h
} with the weight
res h
ij
,
characterizing how much their values for the given
indicators deviate from the desired values of x
ij
id h
for
resource j in subdivision h. The indicators are
brought together in an additive way into a unified
satisfaction function. In this model, the target
function of resource agents (res) in subdivision at
level h of enterprise structure on satisfaction from
range [0,1] is piecewise linearly dependent on
indicators x
i
h
, on their values at the previous level of
organization h-1 and the values of satisfaction of
resource agents. Similarly, functions with the weight
task h
mn
of satisfaction of tasks u
task h
n
at the level h
can be given, where the set {y
n
h
} and {z
p
h
} is
considered as indicators for agents of products u
prod
.
For each of the agents of resources, tasks, products,
and enterprise agent, importance (priorities) {w
j
res
h
}, {w
n
task h
}, {w
p
prod h
}, respectively, can be
introduced. Superposition of satisfaction functions is
related to functions of bonus-penalties.
The enterprise agent is considered the only one at
each level h of enterprise structure. The task of
building an enterprise plan is to maximize
satisfaction of agents for level of enterprise structure
h=1,..., H, including agents of resources, tasks and
products (1):
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
252

where x
res h*
, y
task h*
, z
prod h*
, s
dep h*
are the
"optimal" (for this situation) values of variable
resources, tasks, products and enterprise for level h.
For the lower level of enterprise structure the
functions of satisfaction components f
ij
h=1
do not
depend on the previous values,
,
The variables x, y, z, s lie in the range of the
following indicators: D
I
resources, D
M
work on
technological processes, D
K
products, and D
L
enterprise agent, where I, M, K, L are dimensions of
the corresponding spaces.
Evaluation of their states is performed by agents
using the functions of satisfaction and bonus-penalty
multi-component functions.
Evaluation of the quality of planning in
operational schedulers is carried out using the main
criteria:
• minimization of production end time and
compliance with delivery dates of each object;
• maximization of the number of produced
object for the given planning horizon;
• minimization of time spent on production of
each TAU and AU;
• minimization of delays and storage time for
assembled aggregates, TAU and AU between
operations;
• maximum concurrency of TAU production,
allowed by technical processes;
• ensuring uniformity of equipment load in each
workshop and reducing downtime;
• uniformity of work load of employees and
minimization of additional shifts;
• decreasing the amount of work in progress at
the end of the period.
Thus, the planning task is formulated for agents
as the task of maximizing total satisfaction (1),
provided that decisions taken by the agents are
consistent. The recursiveness of the task by
department level and the non-linearity with respect
to the solutions at the previous level allow for an
iterative solution with the help of "nested" network
multi-agent schedulers of aggregate and final
assembly shops.
4 THE BASIC METHOD OF
ADAPTIVE PLANNING
At the heart of the developed multi-agent planning
technology lies the concept of "virtual market" of a
DR-network of any department, production line or
shop, where order agents can buy resource services
at a virtual price.
Within the virtual market of the system, orders
receive a certain stock of virtual currency for
purchases of finished products (components) or
resource services, and resources sell their services
on a time-based or other basis. Order agents can
enter into virtual contracts with resource agents, but
then, if necessary, they can reconsider their
decisions, compensating each other for possible
losses from the break of contacts. In the long term,
virtual money can be directly linked to real money
and micro-contracts during order execution to reflect
the state of production in real time.
The basic method of adaptive planning based on
the example of initial planning of TAU in the
operational planner of the workshop is as follows:
1. The order agent for production of a new TAU
loads its execution technology from the KB and
creates an agent of technological process (tasks).
2. The technological process agent creates agents
of child tasks (operations within the technological
process), setting tasks for them.
3. Agents of tasks begin searching for free (or
busy, if they are not available) resources in the scene
of the shop, which will cost the least amount of
virtual money, providing the maximum profit due to
the bonus part of the penalty function.
4. If the resource is already occupied by other
tasks, the conflict is fixed and its resolution begins.
Designing Distributed Multi-Agent System for Aggregate and Final Assembly of Complex Technical Objects on Ramp-up Stage
253
5. In case of a conflict, the task already placed on
the resource is asked to give way, but if the new
placement is worse, then the required compensation
is calculated according to the function of bonuses
and fines.
6. If the required compensation is too high, the
incoming task itself starts to look for a new
placement. And if the compensation is acceptable, it
pays for the departure of the previous task.
7. This process continues until there is a dynamic
stop, when no agent can improve its condition
(satisfaction function).
8. At this point, the Enterprise Agent identifies
the agent with the worst criteria for the system as a
whole.
9. The selected worst agent is given a command
to break ties and be dis-scheduled from related
orders / resources.
10. The selected agent receives an increased
importance coefficient for the worst criterion in its
satisfaction function, which will cause selection of
other options when it is rescheduled.
11. The agent tries to be rescheduled – if
successfully, the process proceeds to the next
criterion and the corresponding agent.
12. If not successfully, the agent reports the sum
of virtual currency, which he needs in order to reach
a new criterion value.
13. The enterprise agent assesses availability of
this sum in the system and, if necessary, adds the
virtual currency to the agent.
14. As a result, the worst agents iteratively "pull
up" their criteria to new values, compensating for
the losses of other agents at the expense of the
virtual budget.
15. The process ends when all the criteria of the
system as a whole fall into the comfort zone or when
they can no longer change.
16. Otherwise, control is transferred to the user
for further manual improvement.
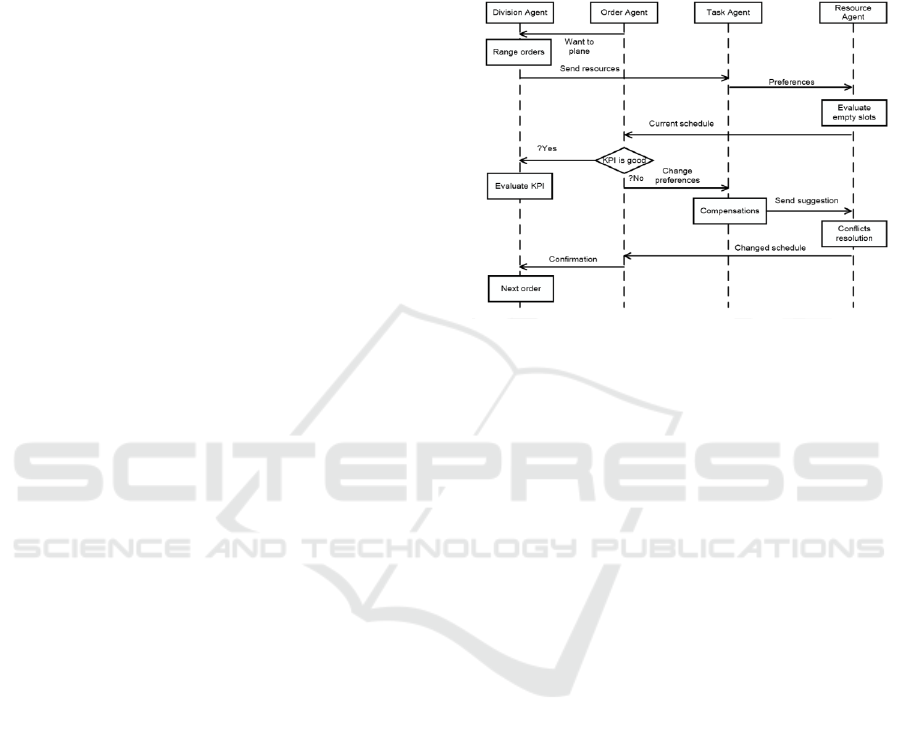
Improvement of the current state of agents is
performed through proactive interaction between
order agents, task agents and resource agents within
the proactivity protocol (Figure 1).
Division agent, having received a message from
the order agent, ranks the order list according to the
delay fine in the descending order. Then, during
evaluation of the schedule, the division agent
updates all of its indicators, the total profit, and
normalized criteria values. The list is dynamically
rebuilt as a result of the algorithm performance.
The tasks search for a more profitable position in
the resource schedule, while each resource plans
more profitable tasks in the oncoming process.
Changes in the positions of task agents are made
on the basis of the compensation method. In this
method, permutations occur in those cases where
compensation to the displaced agent from the
shifting one exceeds the decrease of its objective
function.
Figure 1: The part of simplified protocol proactive
improvement of schedule.
The conditions for completion of the event
scheduling algorithm are as follows:
• the stop occurs when the system reaches the
balance of satisfaction between conflicting
agents (orders and resources, as well as
others), when none of the proposals can
increase the value of indicators;
• changes in agents' indicators and agent
satisfaction associated with them does not
exceed the specified threshold (set in the
settings);
• termination of negotiations between
conflicting agents in case of refusal by the
parties to further negotiate due to lack of
options or achievement of the state of full
"nirvana" (specified special zone of
satisfaction);
• the allotted number of iterations or the
specified time for proactive improvement has
been exceeded;
• failure to reach the specified by the user
indicators, with a message to the user about
the need for manual intervention to resolve
conflicts.
As a result, the created schedule is built in the
process of self-organization of shop agents, which
allows for flexible and quick adaptation of the
schedule depending on events.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
254
5 ARCHITECTURE OF THE
BASIC MULTI-AGENT
SYSTEM
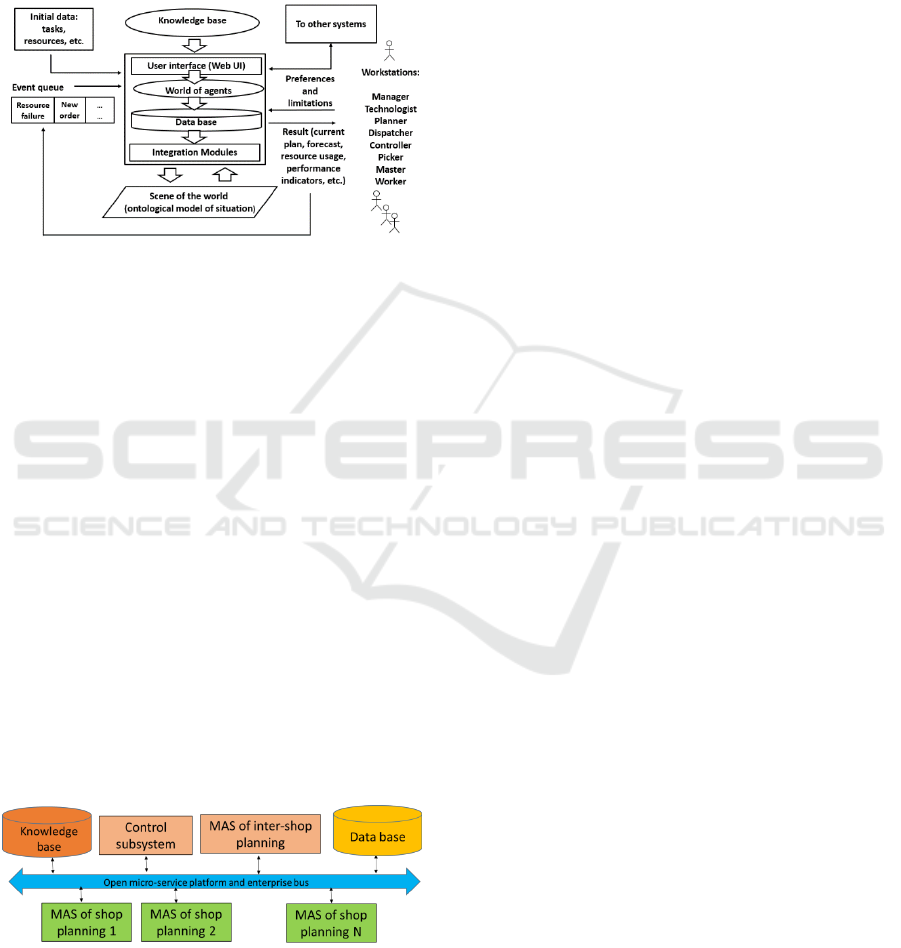
The architecture of the multi-agent scheduler is
presented in Figure 2.
Figure 2: The architecture of the multi-agent scheduler.
The following most important components are
found in the architecture of the basic multi-agent
scheduler:
• World of agents consists of instances of agent
classes to be executed. Agents are
asynchronous software objects (programs)
operating as a state machines.
• Event queue provides accumulation of events
coming from the real world, as well as their
processing.
• The World Scene is a semantic model of the
current situation, built by the agents of the
system on the basis of ontology.
• Application components make it possible to
perform additional functions for third-party
systems and user interfaces.
The distributed multi-agent system contains two-
level "system of systems". This system is based on
the network-centric interaction of planning modules
(schedulers) used at the inter-shop (strategic) and
workshop (operational) levels (Figure 3).
Figure 3: Network-centric system architecture.
The module of end-to-end inter-shop planning
forms the work schedule for a group of aggregate
and final assembly shops with a time horizon of one
quarter. Information on the capacity of equipment
and the total number of employees of a certain
category is taken into account as limitations for
orders execution.
At the shop level, there are operational planners,
each of which is responsible for scheduling a certain
workshop. The operational planning module has
more detailed information about the resources of its
workshop, including peculiarities of technological
processes, the composition and characteristics of
equipment and personnel. The technological
processes considered at this level can have a greater
degree of granularity and additional requirements for
characteristics of equipment and employees.
6 USING THE KNOWLEDGE
BASE FOR ADAPTIVE
PLANNING
The main purpose of the Knowledge Base (KB) is
formalization of the problem domain in order to
provide all the necessary information to systems that
solve applied problems, in particular, planning and
managing resources, by aggregating knowledge
from various information sources and providing the
user with the most complete information on the
object and the current situation in production.
The purposes of using KB are the following:
• customization of MAS scheduler for the
specific features of each workshop;
• extension of matching rules for assigning
tasks to resources (add criteria "on the fly");
• ensuring openness of the system and reducing
the costs of its operation.
The formalized model of knowledge in KB is
represented as classes of concepts and relations that
form semantic network of the domain. The
knowledge base technology is used in this case in
order to more accurately specify the requirements
that should be taken into account for individual
planning of each operation within the technological
process and to separate this knowledge from the
source code of the system in order to enable users to
independently expand or modify this information.
For ease of use, three levels of domain
description are distinguished: "ontology",
"ontological model", and "situation" ("scene)".
The key element within KB is ontology, which at
the basic level should, first of all, provide a
vocabulary of concepts for representation and
exchange of knowledge, as well as the multiple
relationships (relations) established between the
Designing Distributed Multi-Agent System for Aggregate and Final Assembly of Complex Technical Objects on Ramp-up Stage
255
concepts in this vocabulary. Attributes are
introduced for concepts and relationships, in order to
expand the possibility of describing subject areas by
including in ontology not only objects, but also their
qualitative and quantitative characteristics.
The ontological model describes real workshop
as a set of equipment, workers, technological
processes and operations, etc.
The scene describes instances of concepts and
relations with specific attribute values at the given
point in time (a set of facts).
The ontology consists of the following sections:
• organizational structure of the enterprise,
describing the list of departments, employees,
their professions, positions, competencies;
• infrastructure model of the enterprise,
describing the main technical means
(equipment, tools, materials, production sites,
facilities, characteristics of material objects,
physical and technical principles of operation,
etc.);
• technological processes of assembly,
describing the processes of the main activities
(production technology);
• manufactured products and provided services,
key indicators of quality and efficiency of
service delivery;
• professional specialization and competence of
workers;
• other knowledge required to plan operations
of technological processes.
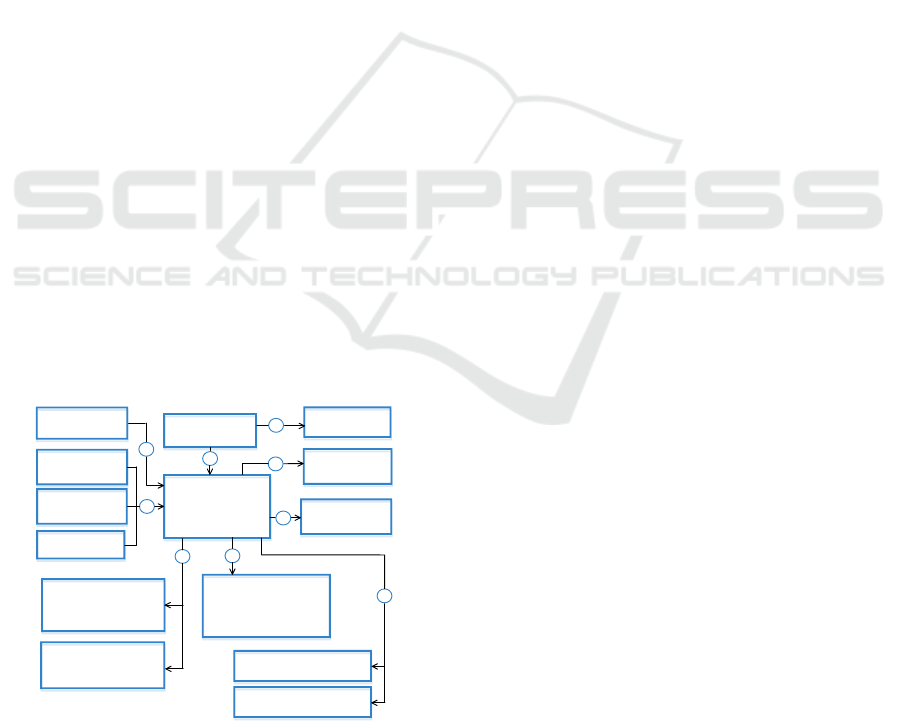
The main part of the knowledge base for
planning is the concept "Task" and its instances for
performing specific technological operations (Figure
4).
1
Product
name: wing
Task
name: drilling holes
number: 205.0005
labor intensity: 52
Group Task
code: 205.00060
Previous Task
code: 205.0001
Auxiliary equipment
type: drill
model: VD-500
Main equipment
type: assembly station
model: P019
Assembly unit
name: TAU 5702
Assembly unit
name: TAU 5802
Employee
personnel number: 00075
Employee requirement
profession: assembler
rank: 4
number: 2
Material
type: sealant
Next Task
code: 205.0015
Assembly unit
name: TAU 5608
3
2
5
6
5
Employee
personnel number: 00105
4
8
7
Figure 4: Relations in the concept "Task".
The presented relations in the concept "Task" are
used by agents in resource management system in
the following way:
• "Previous" (1) and "Next" (6) – allow the
agent to find the previous task with the request
to move earlier or reschedule, to find the next
task, and to send its agent a delay message;
• "Input objects" (2) and "Output objects" (5) –
show which agents should be in the scene to
start the task execution, and also what will be
the output as the result of task execution;
• "Part-Whole" (3) – shows that the task is a
part of a compound problem, the agent of
which receives parameters of the plan and the
fact of the task;
• "Employee Requirements " (4) – defines the
requirements for the performer of the task;
• "Who did it last time?" (7) – finds employees
who have already performed such tasks;
• "Required resource" (8) – specifies a resource,
predetermined by the manufacturing process.
The developed approach to MAS prototype
makes it possible to add new rules of matching "on
the fly", taking into account the complexity factors
revealed during planning for the workshops.
7 CONCLUSIONS
Further developments will be aimed at
implementation of schedulers of workshops and
their coordinated interaction in distributed system of
system for factory scheduling.
The transition from one centralized "global"
scheduler to a distributed MAS solution based on a
network of MAS schedulers of workshops will
ensure further expansion of the system, better
efficiency, flexibility and performance, productivity,
scalability and reliability of the system.
Further research will be focused on measuring
adaptability, quality and efficiency of scheduling.
ACKNOWLEDGEMENTS
This paper was prepared with the financial support
of the Ministry of Education and Science of the
Russian Federation – contract №14.578.21.0230,
project unique ID is RFMEFI57817X0230.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
256

REFERENCES
Cox, J., Spencer, M., 2000. The Constraints Management
Handbook. SRC PRESS. London.
Herrmann, J. (ed.), 2006. Handbook of Production
Scheduling. Springer. Switzerland.
Klocke, F., Stauder, J., Mattfeld, P., 2016. Modeling of
Manufacturing Technologies During Ramp-up.
Procedia CIRP, vol. 51, pp. 122-127. Elsevier.
Leitão, P., Barbosa, J., Vrba, P., Skobelev, P., Tsarev, A.,
Kazanskaia, D., 2013. Multi-agent System Approach
for the Strategic Planning in Ramp-up Production of
Small Lots. In IEEE SMC 2013, the IEEE
International Conference on Systems, Man and
Cybernetics. IEEE Computer Society, Washington,
DC, USA, pp. 4743-4748.
Rzevski, G., Skobelev P., 2014. Managing complexity.
WIT Press. Boston.
Skobelev, P., 2014. Multi-Agent Systems for Real Time
Adaptive Resource Management. In Industrial Agents:
Emerging Applications of Software Agents in Industry.
Elsevier.
Vittikh, V., Skobelev, P., 2003. Multiagent Interaction
Models for Constructing the Demand-Resource
Networks in Open Systems. Automation and Remote
Control, vol. 64, issue 1, pp. 162-169.
Skobelev, P., 2012. Activity ontology for situational
management of enterprises in real-time. Ontology of
Designing, vol. 1, issue 3, pp.6-38.
Mayorov, I., Skobelev, P., 2015. Towards
thermodynamics of real timescheduling. International
Journal of Design & Nature and Ecodynamics, vol.
10, issue 3, pp. 213-223. WIT Press.
Designing Distributed Multi-Agent System for Aggregate and Final Assembly of Complex Technical Objects on Ramp-up Stage
257
