
Studying Natural Human-computer Interaction in Immersive Virtual
Reality: A Comparison between Actions in the Peripersonal and in the
Near-action Space
Chiara Bassano, Fabio Solari and Manuela Chessa
Dept. of Informatics, Bioengineering, Robotics, and Systems Engineering,
University of Genoa, Genoa, Italy
Keywords:
Virtual Reality, Natural Human-computer Interaction, Peripersonal Space Interaction, Near-action Space
Interaction, Virtual Grasping, Head Mounted Displays, Oculus Rift, Leap Motion.
Abstract:
Interacting in immersive virtual reality is a challenging and open issue in human-computer interaction. Here,
we describe a system to evaluate the performance of a low-cost setup, which has not the need of wearing
devices to manipulate virtual objects. In particular, we consider the Leap Motion device and we assess its
performance into two situations: reaching and grasp in the peripersonal space, and in the near-action space,
i.e. when a user stays on foot and can move his own arms to reach objects on a desk. We show how these
two situations are similar in terms of user performance, thus indicating a possible use of such device in a wide
range of reaching tasks in immersive virtual reality.
1 INTRODUCTION
In the last decade, virtual reality (VR) has had a
widespread success, thanks to the release of several
head-mounted displays (HMDs), such as the Oculus
Rift or the GearVR (by OculusVR), the HTC Vive,
the Project Morpheus (by Sony) or the Google Card-
board. These new technologies can be considered low
cost if compared to the ones previously available, for
example expensive motion capture systems or room-
filling technologies, such as the CAVE. In the past,
because of the high cost of the hardware required, VR
was mainly used for military applications, cinema and
multimedia production. Nowadays, instead, it has be-
come very popular in the entertainment world and has
caught the attention of researchers who are studying
its application in many other different fields: serious
games and edutainment, cognitive and physical reha-
bilitation, support for surgeons in diagnosis, operation
planning and minimal invasive surgery, modeling and
products design, assembly and prototyping process,
cultural heritage applications.
The work presented in this paper is a prelimi-
nary study, mainly focused on analyzing interaction
modalities within immersive virtual reality. In fact, in
many cases, controllers or joysticks are used to inter-
act with the virtual environments. Even if this solu-
tion is effective, actions performed do not resemble
to their real counterpart: people do not push buttons
to grab objects in their daily life. Therefore, non-
wearable devices could be an alternative solution. In
particular, the Leap Motion, a hand tracker device, al-
lowing the user to interact with virtual objects without
wearing specific tools and to see a virtual representa-
tion of his hands, seems to be promising. A recent
study (Sportillo et al., 2017), compared a controller-
based interface with a realistic interface, composed
by a steering wheel and the Leap Motion, in a driv-
ing simulation application. People reaction time was
lower in the first case but a better control over the ve-
hicle and a higher stability was measured in the sec-
ond case. Moreover, (Khundam, 2015; Zhang et al.,
2017) implemented a walk-through algorithm for nav-
igating the virtual environment based on hand-gesture
detection. Performances were task-dependent, but
participants preferred the Leap Motion to traditional
gamepads and joysticks, stating it is more intuitive,
easier to learn and use, causes less fatigue and motion
sickness and induces more immersion. Despite its
tracking issues, researchers are very interested in the
application of the Leap Motion for different purposes:
simulation of experiments (Wozniak et al., 2016) or
oral and maxillofacial surgery (Pulijala et al., 2017),
gaming, from puzzle (Cheng et al., 2015) to First
Person Shooter (Chastine et al., 2013), model craft-
ing (Park et al., 2017) and visualization of complex
108
Bassano, C., Solari, F. and Chessa, M.
Studying Natural Human-computer Interaction in Immersive Virtual Reality: A Comparison between Actions in the Peripersonal and in the Near-action Space.
DOI: 10.5220/0006622701080115
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 2: HUCAPP, pages
108-115
ISBN: 978-989-758-288-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

dataset (Reddivari et al., 2017; Cordeil et al., 2017).
In this paper, we aim to assess the stability, efficiency
and naturalness of a Leap Motion-based interface dur-
ing the interaction with virtual objects in the periper-
sonal and near-action space. We define as periper-
sonal space the area reachable by an user sitting in
front of the game area; whereas we define as near-
action space the area in which the user can reach ob-
jects standing in front of the workspace and perform-
ing few body movements (not walking).
2 RELATED WORKS
The success of virtual reality and HMDs is correlated
with the fact that these low cost technologies are still
able to provide a truly immersive experience (Chessa
et al., 2016) and an intuitive human-computer inter-
face.
Headset like the Oculus Rift and the HTC Vive also
provide simple tracking systems, able to localize and
track the HMD in a limited area. Moreover, these
commercial systems offer better performance, higher
resolution and lower weight with respect to expen-
sive specialized hardware (Young et al., 2014). Con-
versely, they tend to cause simulator sickness. Any-
way, it is also important taking into account that,
while the HTC Vive is conceived as a room-scale de-
vice, the Oculus Rift is mainly suggested for seated
or standing scenarios (Cuervo, 2017). A recent study
compared the two HMDs in a Pick-and-Place task and
pointed out that the HTC Vive tracking system is more
reliable and stable than the Oculus one, while there is
no difference in term of precision (Su
ˇ
znjevi
´
c et al.,
2017).
In order to guarantee a natural interaction, it is also
fundamental considering the reliability and precision
of the Leap Motion device. Its stated accuracy is
1/100th of a millimeter in a range from 25 to 600
mm above the device. Anyway, it has been demon-
strated that in static scenarios (not moving hands), the
error in measurement is between 0.5 mm and 0.2 mm,
depending on the plane and on the hand-device dis-
tance; while in dynamic situations (moving hands),
independently from the plane, an average accuracy of
1.2 mm could be obtained (Weichert et al., 2013). To
our knowledge, no study on the Leap Motion accu-
racy has been conducted yet with the device mounted
on a HMD. Anyway, for our purpose, we can consider
the hand tracker device reliable enough.
Finally, an issue with which everyone trying to recre-
ate a natural hand-based interaction with virtual en-
vironment deals with is the hand-object interpenetra-
tion due to the absence of real physical constraints
between the virtual hand and the virtual object. Dif-
ferent grasping approaches has been investigated: us-
ing a 3D model which simply follows the real hand
and can interpenetrate objects; a see-through method,
similar to the previous one, but showing the actual po-
sition of the fingers inside the objects; using a hand
model constrained to avoid interpenetration; using
two hands, a visual one not interpenetrating objects
and a ghost hand directly following the real one; using
different kind of feedback during collision, such as vi-
sual (object or fingers changing color), haptic (pres-
sure, vibration) or auditory feedback.
Many studies have pointed out that even if people
prefer interpenetration to be prevented, actually this
method does not improve performances, while any
kind of feedback seems to be a promising solution
(Prachyabrued and Borst, 2012; Prachyabrued and
Borst, 2014; Just et al., 2016).
3 MATERIALS AND METHODS
3.1 Hardware Components
The experimental setup is composed of a head-
mounted display, the Oculus Rift DK2
1
, with its own
positional tracking camera, and a computer able to
support VR. For the interaction with virtual objects,
we used the Leap Motion
2
mounted on the HMD.
The Oculus Rift DK2 has a 2160 × 1200 low-
persistence OLED display with a 90-Hz refresh rate
and vertical and horizontal field of view (FOV) of
maximum 100 degrees (Figure 1b). This headset con-
tains a gyroscope, an accelerometer and a magne-
tometer, which allow to calculate user’s head rotation
in the three-dimensional space and consequently to
synchronize his perspective in the virtual environment
in real-time.
Moreover, the Oculus Rift provides a 6-degree-of-
freedom position tracking system: the Oculus Sensor
device is an infrared camera able to detect and track
the array of infrared micro-LEDs on the HMD sur-
face. In this way, it is possible to obtain a precise 3D
position estimation and tracking of the user head in
the 3D space. The tracking area, however, is defined
by the limited field of view of the camera (Figure 2).
Another important element of our setup is the Leap
Motion. It is composed by two cameras and three in-
frared LEDs that allow to detect hands inside a hemi-
spheric area of approximately 1 meter above the de-
vice. Originally conceived for desktop applications,
1
https://www.oculus.com/
2
https://www.leapmotion.com/
Studying Natural Human-computer Interaction in Immersive Virtual Reality: A Comparison between Actions in the Peripersonal and in the
Near-action Space
109

Leap Motion has been recently adapted for VR appli-
cations: a special support for the device to be placed
at the centre of the frontal part of the HMD (Figure
1a) is supplied and on the web site it is possible to
freely download an integration software for the devel-
opment of VR contents, the Orion Beta. In our case,
we used the 3.2.0 version.
a
b
Figure 1: (a) Leap Motion device mounted on the Oculus
Rift DK2 (b) FOV of the Oculus Rift and of the Leap Mo-
tion device.
Figure 2: Field of view of the Positional Tracking Camera
of the Oculus Rift.
Finally, the computer we used respects the minimum
requirements for both the Oculus Rift and the Leap
Motion. It is an Alienware Aurora R5 with a 4GHz
Intel Core i7-6700K processor, 16GB DDR4 RAM
and a Nvidia GeForce GTX 1080 (8GB GDDR5X
RAM) graphics card.
3.2 Software Components
The VR environment has been created using Unity 3D
version 5.6.1f1. Unity 3D is one of the most used
game engine for the creation of games and 3D and
2D contents. In order to integrate the Oculus Rift and
the Leap Motion with Unity, we used the specific in-
tegration packages, respectively the Oculus Utilities
and the Leap Motion Unity Asset Core and Modules,
available on the official sites of the two devices.
3.3 Subjects
21 people, 12 males and 9 females, aged between 24
and 52 (mean 30,8 ± 6,7 years) took part to the exper-
imental session. All the participants were volunteer
and received no reward. The majority of them had al-
ready tried the Leap Motion and VR devices and ap-
plications in the past, but only 4 of them had already
tried the Oculus Rift.
3.4 Interaction Task
As our main purpose is investigating the operability
limits deriving from the combination of the Leap Mo-
tion and the Oculus Rift when interacting with virtual
objects, the task is very simple so that performances
are related mainly on the interaction than on the level
of difficulty of the task itself.
Participants wear the Oculus Rift and act in a virtual
room. Right in front of them, there is a virtual desk,
corresponding to the real desk in position and dimen-
sion, while behind them a virtual bookcase, corre-
sponding to the real one, delimits the game area (Fig-
ure 3). The position of these elements is defined in
the reference system of the tracking camera, which is
considered the origin of our virtual environment. The
camera, in fact, is the only fixed point in our setup,
existing in both realities, the real one and the virtual
one, and the position and rotation of the headset in the
3D space is referred to the system of reference of the
camera. When the Oculus Rift is out of the boundaries
of the camera FOV, lags occurred in the rendering of
the scene. When this happens, red lines, representing
the camera tracking cone, are displayed so that the
player can understand the reason of the problem and
come back to the tracked area.
On the desk there are 12 objects, different in color
and shape, and players are asked to grab them, one
per time and using a single hand, and place them in
the corresponding hole in the black support behind.
HUCAPP 2018 - International Conference on Human Computer Interaction Theory and Applications
110

A desktop application, showing the scene from a fixed
point of view, allows an external operator, the super-
visor, to see what the player is doing and help him in
three ways: deleting some objects in order to make
the scene clearer; repositioning objects accidentally
thrown out of the game area; selecting a hole. The
operator will also be able to reset the scene, start the
timer for the acquisitions and stop it.
As in a pilot study, in a task of grabbing and dragging
a
b
Figure 3: Example of the two different setups with the main
user immersed in the virtual reality and an external opera-
tor supervising him: (a) Peripersonal space setup (b) Near-
action space setup.
objects in the near-action space, participants com-
plained about the instability of the hands tracking,
which caused inadequate performances, we have de-
cided to write our own grasp function instead of us-
ing the one provided in the Leap Motion Interaction
Module. Moreover, we have decided to create two
slightly different versions of the game, one with the
interactable virtual objects in the peripersonal space
and one with the objects in the near-action space. In
the first case, the game area corresponds almost to the
real desk 110 cm long and 60 cm wide and the vol-
unteer sits on the chair; in the second case, instead,
the game area occupies part of the real desk and the
space between the desk and the bookcase, for a total
surface 156 cm long and 140 cm wide and the par-
ticipant has to stand up and play on foot (Figure 3).
The two setups have been created in order to under-
stand whether low performances, previously obtained
in the pilot study, were due to the algorithm used to
interact with virtual objects or to Leap Motion track-
ing issues in a near-action space interaction. Con-
cerning the grasp function, every time a hand collides
a
b
c
Figure 4: Grasp function: (a) The user looks at the scene
(b) The user reaches an object (c) The user grabs an object.
with an object, the object itself turns grey (Figure 4b)
and the distance between the palm and the center of
the object is calculated. We then check the hand’s
Grab Angle, which is a precalculated value, and, in
case it is greater than a threshold experimentally de-
fined, the object becomes purple (Figure 4c) and its
new position is calculated so that the distance between
hand and object remains constant; if the Grab Angle
is smaller than the threshold, no changes are applied
to the object. The most correct way to grasp an object
is approaching it with the hand open and closes it un-
til the object changes color. While, in order to release
the object, the user has to open his hand and move it
away from the item.
In order to ensure a greater stability, we also decided
not to implement a realistic physics. For example,
when an object is not colliding with the hand, its po-
sition and rotation is locked. On one hand, this causes
the presence of objects floating in the air; on the other
hand, it is the simplest way to overcome one of the
most common mistakes users do while using the Leap
Motion: grabbing an object and looking around for
the right hole. In fact, the rotation of the head causes
the hand to get out of the edges of the Leap Motion
FOV (Figure 1b), which can potentially lead to an un-
stable behavior of the object grabbed.
Studying Natural Human-computer Interaction in Immersive Virtual Reality: A Comparison between Actions in the Peripersonal and in the
Near-action Space
111

3.5 Experimental Parameters
The evaluation of the performances is divided in 3 dif-
ferent parts: (i)objective parameters recorded during
the game execution; (ii) the Simulator Sickness Ques-
tionnaire; (iii) the user’s subjective opinion.
3.5.1 Objective Parameters
During the task execution, for each participant, we
measured the total time required to complete the task
and the average time required to position each sin-
gle object. As the task is very simple, we expect
that these values reflect the stability and efficiency of
the human-computer interaction modality used, only.
Moreover, we counted the number of errors, in terms
of repositioned or deleted pieces, selection and reset
actions. If the system is stable, then participants will
not need any external aid.
3.5.2 Simulator Sickness Questionnaire
The Simulator Sickness Questionnaire (SSQ)
(Kennedy et al., 1993) is the standard test commonly
used when working with virtual reality. It allows
to analyze the participants’ status before and after
each exposure to VR in order to estimate if the
experience inside a virtual environment had some
physical effects. It considers 16 different aspects:
general discomfort, fatigue, headache, eye strain,
blurred vision, dizziness with eyes opened or closed,
difficulty focusing or concentrating, fullness of
head, vertigo, sweating, salivation increase, nausea,
stomach awareness, burping. These symptoms
indicate a state of malaise due to a poor quality of the
rendering of the virtual environment or to a too slow
integration of signals coming from different sensors
or to a bad tracking leading to a delay between
visual information coming from the HMD and other
information coming from other sensory channels
(vestibular, proprioceptive). The user has to rate
these voices using a scale ranging from 0 to 4, where
0 is none and 4 is severe.
3.5.3 Subjective Opinion
In order to evaluate the user’s experience we wrote
a custom questionnaire, taking into account different
aspect related to the interaction of the user in VR.
First of all, it is important to understand his/her de-
gree of confidence in moving in a virtual environment,
unable to see the real obstacles surrounding him (real
desk and bookcase). Then, we are interested in inves-
tigating at what extent movements performed are per-
ceived as natural and intuitive or, otherwise, at what
extent the user has to adapt to the system in order
to interact with virtual objects. Also, the obligation
of using one hand could be perceived as a constraint,
even if in general people unconsciously use only their
dominant hand to perform a task. For this reason, we
would like to receive feedbacks from the users. More-
over, we want to understand if our grasp function is
efficient and stable enough, so that people can easily
complete the task. Finally, it is important to know if
visual feedback provides helpful information.
We ask participants to evaluate their experience in the
two different setups and give a preference. The ques-
tionnaire, as shown below, is composed by an open
question and eight 5-point Likert scale questions:
Q1) Did you prefer the peripersonal space or the
near-action space trial? Why?
Q2) Did you feel safe to freely move your hands in the
peripersonal space trial?
Q3) Did you feel safe to freely move your hands in the
near-action space trial?
Q4) Was the interaction natural in the peripersonal
space trial?
Q5) Was the interaction natural in the near-action
space trial?
Q6) Level of frustration in the peripersonal space
trial
Q7) Level of frustration in the near-action space trial
Q8) In the task, you could use just a hand, did this
fact limit you?
Q9) Did the change in color of reached/grabbed ob-
jects help you?
3.6 Experimental Procedure
The experiment was composed of two trials: the
peripersonal space setup and the near-action space
setup. The order of execution was arbitrarily chosen
by the experimenter: to reduce the statistical variabil-
ity half of the participants carried out the first task
in the peripersonal space setup and half in the near-
action space setup. Before entering the main scene
and starting the experiment, each participant can ex-
plore and act in a demo scene, in order to become
familiar with the virtual scene and the interaction
modality and find the boundaries of the game area.
First, participants were asked to submit the SSQ, in
order to obtain an evaluation of their physical status
before the exposure to VR.
Then, they had to perform the task in one of the two
modality. When all the 12 objects were correctly po-
sitioned, the trial ended.
After this, the subjects had to submit a second SSQ,
which was used both to evaluate users’ status after
the first exposure and before the second exposure to
HUCAPP 2018 - International Conference on Human Computer Interaction Theory and Applications
112
the VR. The second trial was executed in the comple-
mentary modality to the one used during the previous
task. In the two VR scenes the position of the objects
changed, to avoid learning.
Subsequently, the users had to submit two last ques-
tionnaires: another SSQ and the subjective question-
naire.
4 RESULTS
4.1 Objective Parameters
The objective parameters defined to evaluate the per-
formances have been analyzed on four levels: firstly,
we made a general comparison between the results
obtained in the first and second trial, without taking
into account the setup; then, we compared the per-
formances in the two different setups; after this, we
made a ”crossed” comparison considering the order
of execution and the setup; finally, we considered the
personal preference and the setup.
In each analysis the statistical significance of the dif-
ferences between dataset was calculated by making a
t-test analysis.
Dividing the data according to the order of execu-
tion and comparing the mean total completion times
(Table 1), a consistent improvement of performances
between first (mean 89,7 ± 26,4 s) and second trial
(mean 73,3 ± 16,8 s) emerges. This is the only re-
sult statistically significant and can be explained as
the learning curve of participants. These results are
confirmed by the analysis of the completion time in
the crossed comparison between the order of execu-
tion and the setup (Table 3).
Slightly better performances in terms of total comple-
tion time, have been found in the near-action space
setup with respect to the peripersonal space setup, but
this results is not statistically significant (Table 2).
Table 1: Mean and standard deviation of total completion
time over all participants in the first and second trial (*
means a statistically significant difference, p < 0.02).
First vs Second trial
First Second
Mean [s]
89,7* 73,3*
Std [s]
26,4* 16,8*
There is no correlation between preferences and per-
formance, in fact, even if who preferred the near-
action space setup shows better results in the near-
action trial, this is not true for the one who preferred
the peripersonal space setup (Table 4). Anyway the
high variability suggests that more acquisitions are
Table 2: Mean and standard deviation of total completion
time over all participants in the peripersonal space and
near-action space setup.
Peripersonal vs Near-Action Space
Peripersonal Near-Action
Mean [s]
82 81,1
Std [s]
25,7 21,4
Table 3: Mean and standard deviation of total completion
time over all participants considering the order of execution
and the setup (P= Peripersonal, NA= Near-Action).
Order and Setup Crossed Comparison
1
st
P
2
nd
P
1
st
NA
2
nd
NA
Mean[s]
94,8 67,9 84,1 78,3
Std [s]
27,5 14 25,5 17,8
required. Data on partial times confirm previous re-
sults. In all the experiments the only kind of help
that the supervisor needed to use was the reposition-
ing of objects but the mean related to this parameter
was smaller than 0.5 in all the four analysis. Even
if this result is not statistically significant it demon-
strates the stability and reliability of our system. The
absence of statistical significance in the different sets
of data can indicate that the two setups can be consid-
ered equivalent.
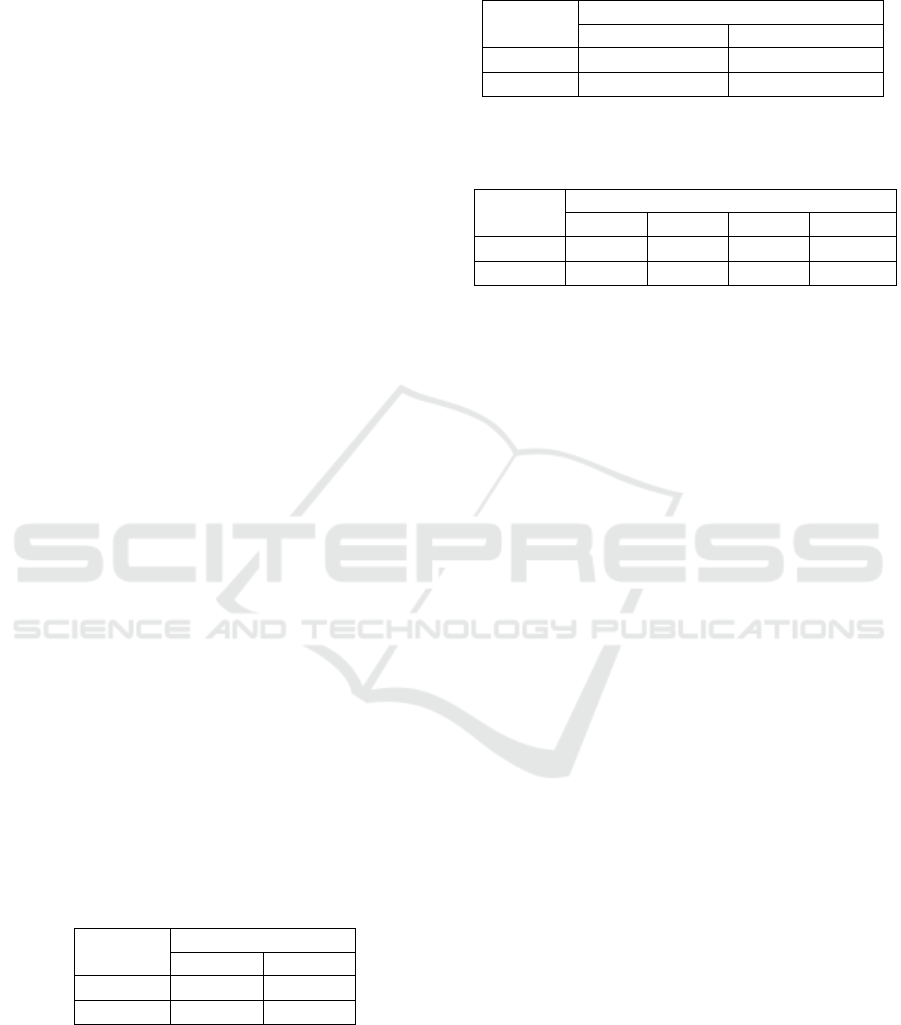
4.2 Simulator Sickness Questionnaire
The SSQ analysis highlights no change in the phys-
ical status of participants as there are no significant
differences between the data acquired before and af-
ter each task execution (see Fig. 5). 3 people how-
ever, reported a strange behavior of the system: in
the peripersonal space setup, when rotating their head
looking at the table, they perceived an oscillatory
movement accompanied by a sort of zooming effect.
This did not happen when they were staring at their
hands while rotating the head. This phenomenon
however did not interfere with their performances nor
caused sickness.
4.3 Subjective Opinion
The subjective questionnaire allows us to know par-
ticipants’ opinions about their experience in VR and
their interaction with virtual objects (see Fig. 6).
4 of the volunteers had not a preference and were
satisfied by both the setups. 11 of them stated that
they preferred the near-action space setup, but rea-
sons were different: some of them said that it was
more comfortable, as it allowed more freedom of
movements and more interaction with the scene and
Studying Natural Human-computer Interaction in Immersive Virtual Reality: A Comparison between Actions in the Peripersonal and in the
Near-action Space
113
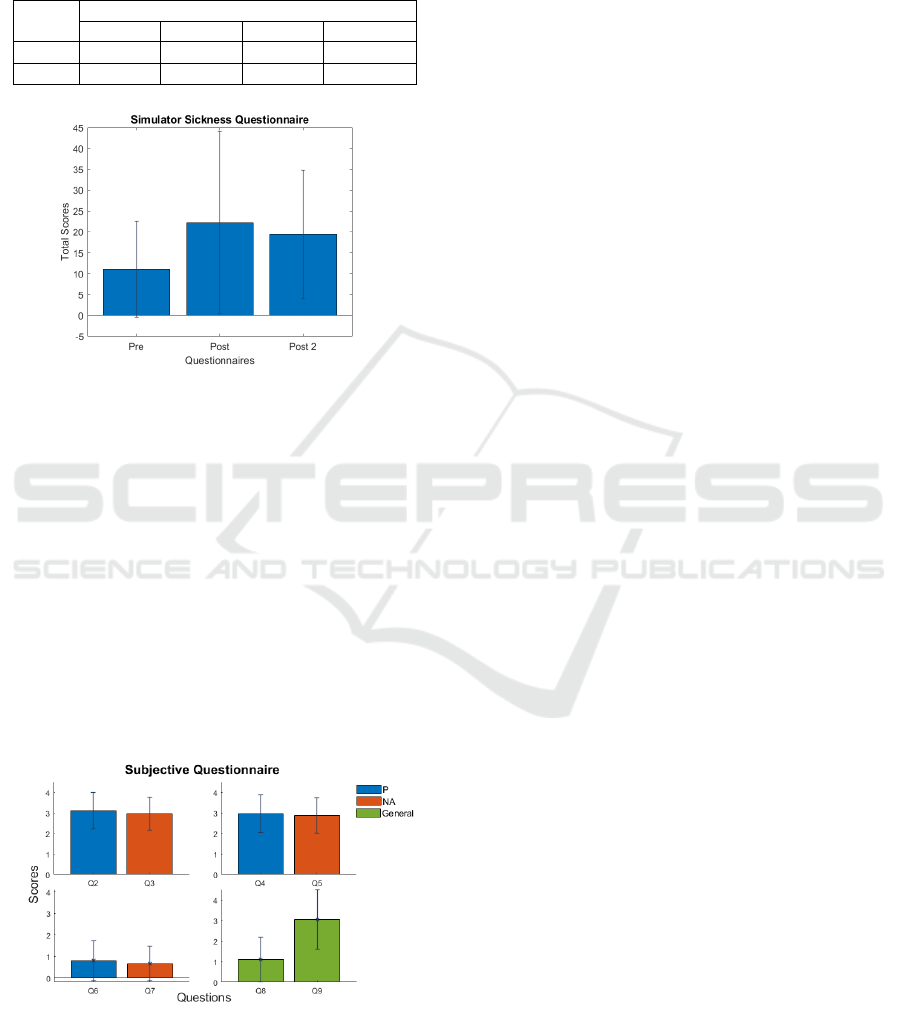
Table 4: Mean and standard deviation of total completion
time (sec) over all participants considering the preference
and the setup (P-P = preference peripersonal - peripersonal
setup, P-NA = preference peripersonal -near-action setup,
NA-P = preference near-action - peripersonal setup, NA-
NA = preference near-action - near-action setup).
Preference and Setup Crossed Comparison
P-P P-NA NA-P NA-NA
Mean
97,6 93,5 73,9 77,8
Std
36,1 24,6 16,1 20,6
Figure 5: Mean and standard deviation of the Simula-
tor Sickness Questionnaires submitted before the first trial
(Pre), between the first and the second trial (Post) and after
the second trial (Post 2).
the virtual objects and consequently the task was fun-
nier and more engaging; other people referred that it
was more realistic regarding distances. 6 of the par-
ticipants judged the peripersonal space setup the best
one, as they felt safer, more at ease and free to move
and complained that in the other setup they felt con-
strained by the wires and the limited game area. Be-
cause of the FOV of Oculus camera, in fact, the game
area is small. Moreover, on the boundaries, the Ocu-
lus tracking system frequently lost the signal from the
HMD, this caused a lag on the rendering of the scene,
Figure 6: Mean and standard deviation of the answers given
to the 8 5-points questions in the subjective opinion ques-
tionnaire. P = peripersonal space setup, NA = near-action
space setup, General = questions not referred to a specific
setup.
which was perceived as annoying and confusing. The
same problem occurred when users rotated too much
their head or looked backward, as there are no infrared
sensors on the back part of the headset. All these fac-
tors influenced the rate given to questions Q2, Q3, Q4,
Q5, which can be considered discrete to good. On one
hand, in the peripersonal space setup, due to the char-
acteristic of the setup itself, people felt their move-
ments were limited, but the tracking was stable; on
the other hand, in the near-action space setup, they
felt freer to move in a larger space but were limited
by the tracking system. Focusing on the naturalness
of the interaction, instead, the absence of physics was
perceived as weird and contributed to lower evalua-
tions.
The interdiction of using both hands together to grab
objects had a minimal influence (Q8), also because
in general people tend to instinctively use just their
dominant hand to move items, even in the real world.
Regarding the interaction with virtual objects and
the ability to complete the task (Q6, Q7), partici-
pants gave very good rates. So we can say that our
grasp function was well implemented. Finally, the
visual feedback (Q9) was appreciate, especially by
those who had stability problem with the Leap Mo-
tion tracking, probably caused by too fast movements
or interference within the sensors of the different de-
vices.
5 CONCLUSIONS
Our work aimed to define a room-scale setup to be
used when working with the Oculus Rift and the
Leap Motion mounted on it. For this purpose, we
have to take into account the limited field of view of
the tracking camera, which causes the game area to
be smaller than the one guaranteed by other tracking
systems commonly used for the VR. Anyway, we
were interested in finding the actual limits of the
two devices and in assessing how people could feel
constrained by them and if it is possible to create an
engaging exergame even in a restricted space. From
the received feedbacks, we can state that people in
general prefer having more freedom of movement
and just the fact of staying on foot satisfied them. The
experience is even more pleasurable and engaging
when the player is far from the boundaries of the
game area, where tracking is less stable: it has
frequently happened that participants had to find
alternative strategies in order to reach certain objects
still remaining in the limits of the camera FOV, for
example stretching their left arm (for right-handed
people). These situations in which the user is forced
HUCAPP 2018 - International Conference on Human Computer Interaction Theory and Applications
114

to adapt reduce the naturalness of the interaction
and the sense of presence. Moreover, we wanted to
evaluate if our grasp function could allow a natural
and efficient interaction with virtual objects. Many
participants also reported that the possibility to
see a virtual representation of their hands and use
them to interact with the surrounding environment,
made them feel more confident, as it enhanced their
capability to estimate distances. Anyway, further
investigations on this topic are required. One of the
main aspects that people pointed out was the absence
of physics rules, so it would be interesting to investi-
gate how to add gravity or collision between objects
without losing stability. Finally, we would like to
refine the parameter controlling the grasp action
and adapt it to the shape of different objects. This
could also potentially solve the object-hand interpen-
etrating problem still maintaining good performances.
REFERENCES
Chastine, J., Kosoris, N., and Skelton, J. (2013). A study
of gesture-based first person control. In Computer
Games: AI, Animation, Mobile, Interactive Multime-
dia, Educational & Serious Games (CGAMES), 18th
International Conference on, pages 79–86. IEEE.
Cheng, B., Ketcheson, M., van der Kroon, J., and Graham,
T. (2015). Corgi defence: Building in a virtual reality
environment. In Proceedings of the Annual Sympo-
sium on Computer-Human Interaction in Play, pages
763–766. ACM.
Chessa, M., Maiello, G., Borsari, A., and Bex, P. J. (2016).
The perceptual quality of the Oculus Rift for immer-
sive virtual reality. Human–Computer Interaction,
pages 1–32.
Cordeil, M., Bach, B., Li, Y., Wilson, E., and Dwyer, T.
(2017). A design space for spatio-data coordination:
Tangible interaction devices for immersive informa-
tion visualisation. In Proceedings of IEEE Pacific Vi-
sualization Symposium (Pacific Vis).
Cuervo, E. (2017). Beyond reality: Head-mounted displays
for mobile systems researchers. GetMobile: Mobile
Computing and Communications, 21(2):9–15.
Just, M. A., Stirling, D., Naghdy, F., Ros, M., and Stap-
ley, P. J. (2016). A comparison of upper limb move-
ment profiles when reaching to virtual and real targets
using the Oculus Rift: implications for virtual-reality
enhanced stroke rehabilitation. Journal of Pain Man-
agement, 9(3):277–281.
Kennedy, R. S., Lane, N. E., Berbaum, K. S., and Lilien-
thal, M. G. (1993). Simulator sickness questionnaire:
An enhanced method for quantifying simulator sick-
ness. The international journal of aviation psychol-
ogy, 3(3):203–220.
Khundam, C. (2015). First person movement control with
palm normal and hand gesture interaction in virtual
reality. In Computer Science and Software Engineer-
ing (JCSSE), 12th International Joint Conference on,
pages 325–330. IEEE.
Park, G., Choi, H., Lee, U., and Chin, S. (2017). Virtual fig-
ure model crafting with VR HMD and Leap Motion.
The Imaging Science Journal, 65(6):358–370.
Prachyabrued, M. and Borst, C. W. (2012). Visual inter-
penetration tradeoffs in whole-hand virtual grasping.
In 3D User Interfaces (3DUI), IEEE Symposium on,
pages 39–42. IEEE.
Prachyabrued, M. and Borst, C. W. (2014). Visual feedback
for virtual grasping. In 3D User Interfaces (3DUI),
2014 IEEE Symposium on, pages 19–26. IEEE.
Pulijala, Y., Ma, M., and Ayoub, A. (2017). VR surgery:
Interactive virtual reality application for training oral
and maxillofacial surgeons using Oculus Rift and
Leap Motion. In Serious Games and Edutainment Ap-
plications, pages 187–202. Springer.
Reddivari, S., Smith, J., and Pabalate, J. (2017). VRvisu:
A tool for virtual reality based visualization of medi-
cal data. In Connected Health: Applications, Systems
and Engineering Technologies (CHASE), IEEE/ACM
International Conference on, pages 280–281. IEEE.
Sportillo, D., Paljic, A., Boukhris, M., Fuchs, P., Ojeda, L.,
and Roussarie, V. (2017). An immersive virtual re-
ality system for semi-autonomous driving simulation:
a comparison between realistic and 6-DoF controller-
based interaction. In Proceedings of the 9th Interna-
tional Conference on Computer and Automation En-
gineering, pages 6–10. ACM.
Su
ˇ
znjevi
´
c, M., Mandjurov, M., and Matija
ˇ
sevi
´
c, M. (2017).
Performance and QoE assessment of HTC Vive and
Oculus Rift for pick-and-place tasks in VR. In Ninth
International Conference on Quality of Multimedia
Experience (QoMEX).
Weichert, F., Bachmann, D., Rudak, B., and Fisseler, D.
(2013). Analysis of the accuracy and robustness of the
Leap Motion controller. Sensors, 13(5):6380–6393.
Wozniak, P., Vauderwange, O., Mandal, A., Javahiraly, N.,
and Curticapean, D. (2016). Possible applications
of the Leap Motion controller for more interactive
simulated experiments in augmented or virtual real-
ity. In Optics Education and Outreach IV, volume
9946, page 99460P. International Society for Optics
and Photonics.
Young, M. K., Gaylor, G. B., Andrus, S. M., and Bo-
denheimer, B. (2014). A comparison of two cost-
differentiated virtual reality systems for perception
and action tasks. In Proceedings of the ACM Sym-
posium on Applied Perception, pages 83–90. ACM.
Zhang, F., Chu, S., Pan, R., Ji, N., and Xi, L. (2017). Dou-
ble hand-gesture interaction for walk-through in VR
environment. In Computer and Information Science
(ICIS), IEEE/ACIS 16th International Conference on,
pages 539–544. IEEE.
Studying Natural Human-computer Interaction in Immersive Virtual Reality: A Comparison between Actions in the Peripersonal and in the
Near-action Space
115
