Foveal Vision for Instance Segmentation of Road Images
Benedikt Ortelt
1
, Christian Herrmann
2,3
, Dieter Willersinn
2
and J
¨
urgen Beyerer
2,3
1
Robert Bosch GmbH, Leonberg, Germany
2
Fraunhofer IOSB, Karlsruhe, Germany
3
Karlsruhe Institute of Technology KIT, Vision and Fusion Lab, Karlsruhe, Germany
Keywords:
Instance Segmentation, Multi-scale Analysis, Foveated Imaging, Cityscapes.
Abstract:
Instance segmentation is an important task for the interpretation of images in the area of autonomous or
assisted driving applications. Not only indicating the semantic class for each pixel of an image, but also
separating different instances of the same class, even if neighboring in the image, it can replace a multi-class
object detector. In addition, it offers a better localization of objects in the image by replacing the object
detector bounding box with a fine-grained object shape. The recently presented Cityscapes dataset promoted
this topic by offering a large set of data labeled at pixel level. Building on the previous work of (Uhrig
et al., 2016), this work proposes two improvements compared to this baseline strategy leading to significant
performance improvements. First, a better distance measure for angular differences, which is unaffected by
the −π/π discontinuity, is proposed. This leads to improved object center localization. Second, the imagery
from vehicle perspective includes a fixed vanishing point. A foveal concept counteracts the fact that objects
get smaller in the image towards this point. This strategy especially improves the results for small objects in
large distances from the vehicle.
1 INTRODUCTION
Understanding the scene in road images is important
for assisted and autonomous driving applications. In-
formation about driving related aspects, such as road
boundaries, object types, free space or obstacles, is
of particular interest. Given images from vehicle per-
spective, an understanding of the surrounding envi-
ronment is required. Instance segmentation serves
this purpose by denoting for each image pixel the un-
derlying object instance and the object class (e.g., car,
truck or pedestrian). Compared with regular seman-
tic segmentation, neighboring instances of the same
class, e.g., two vehicles, are separated, which is im-
portant in traffic situations where each object might
behave differently. In this matter, the instance seg-
mentation replaces an object detector and additionally
provides a pixel-level mask for each object instead of
a simple bounding box. This allows a better localiza-
tion of the object.
Following the widespread terminology (He et al.,
2017), semantic segmentation denotes the per-pixel
classification of the image content, object detection
the acquiring of object bounding boxes and instance
segmentation the per-pixel indication of class and in-
instance
segmen-
tation
instance
segmen-
tation
instance
segmen-
tation
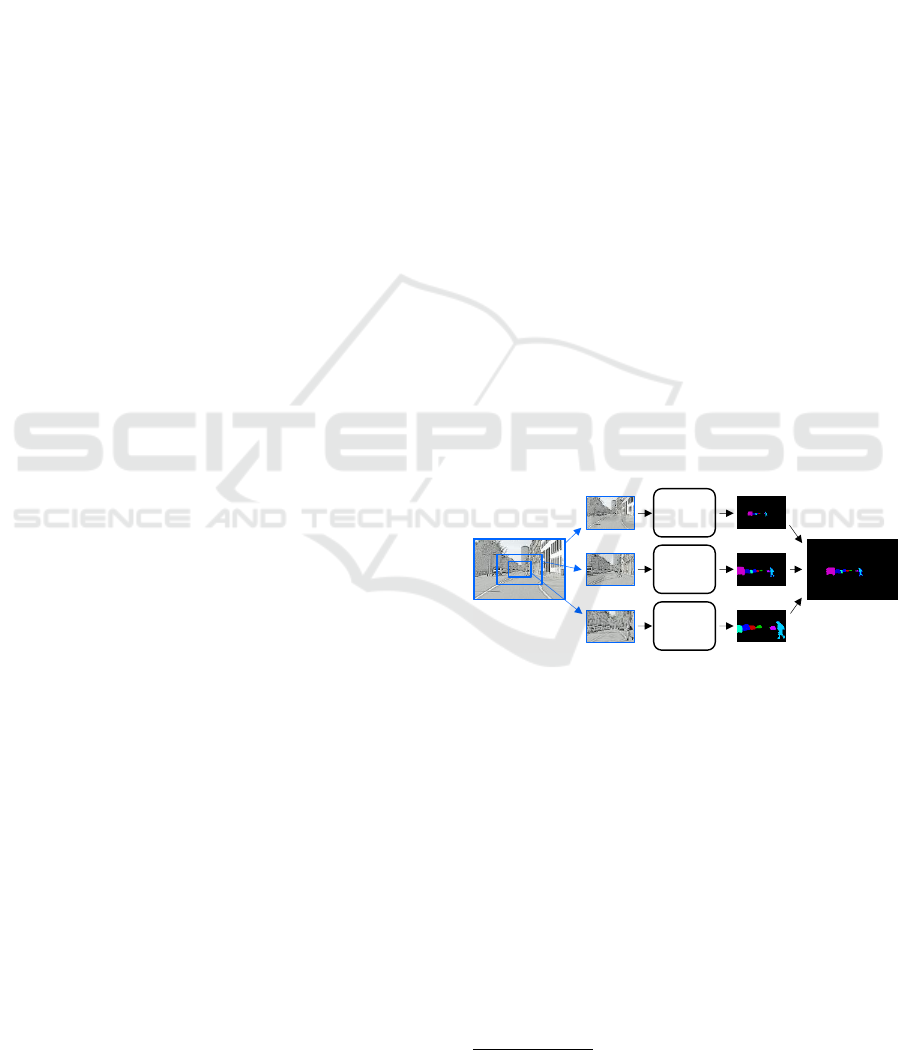
Figure 1: Foveal image analysis concept.
stance which makes this some kind of combination
of segmentation and detection. While semantic seg-
mentation is a very popular research field, instance
segmentation receives less attention. This can also
be observed by the number of submitted results for
the popular Cityscapes benchmark
1
where regular se-
mantic segmentation leads with 52:13 submissions at
the time of writing. Nevertheless, the Cityscapes da-
taset (Cordts et al., 2016) boosted the instance seg-
mentation topic a lot by providing appropriately an-
notated data.
This work builds upon the prior work of Uhrig
et al. (Uhrig et al., 2016) and improves their solution
by two specific contributions. First, an improvement
1
https://www.cityscapes-dataset.com/benchmarks
Ortelt, B., Herrmann, C., Willersinn, D. and Beyerer, J.
Foveal Vision for Instance Segmentation of Road Images.
DOI: 10.5220/0006616103710378
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
371-378
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
371

which is specific to this approach by replacing the dis-
tance measure for angular differences with an impro-
ved version that is invariant to the −π/π discontinuity.
Second, a generic multi-scale foveal concept is pro-
posed to compensate for the perspective properties of
road image data where objects tend to become smal-
ler in the image with increasing distance. A multi-
scale fine-grained analysis around the vanishing point
of the road allows to better address these small objects
as illustrated in figure 1.
2 RELATED WORK
The success of object detection approaches (Girshick,
2015; Ren et al., 2015; Liu et al., 2016) gave rise to
the fine-grained detection of object contours in the
shape of instance segmentation. Two principle con-
cepts to address instance segmentation can be distin-
guished. First, instance candidate approaches build
upon the reliable bounding boxes of an object detector
to refine the object shape. Second, candidate free met-
hods circumvent the object detection by direct estima-
tion of the object’s shape. Regarding dataset choices,
while Cityscapes (Cordts et al., 2016) is the current
state-of-the-art benchmark for instance segmentation
in road images, the MS COCO dataset (Lin et al.,
2014) offers a wider spectrum of image contents and
the KITTI dataset (Geiger et al., 2012) with additi-
onal instance labels (Chen et al., 2014; Zhang et al.,
2016a) is an older and smaller road image choice. Be-
cause this paper focuses on road scene understanding,
the Cityscapes dataset will be used for training and
testing the proposed methods.
2.1 Instance Candidate Methods
The refinement of bounding boxes allows to dis-
tinguish between instance pixels and background
pixels. The most direct approach is to learn a mask-
regression in addition to the bounding box regres-
sion and the class label (He et al., 2017). Fusing
several sub-networks by a cascade (Dai et al., 2016)
or using an identification network with a Conditio-
nal Random Field (CRF) (Arnab and Torr, 2017) are
further options. Fully Convolutional Neural Networks
(FCNs) (Long et al., 2015) can be used to improve er-
roneous bounding boxes by adjusting their size (Hay-
der et al., 2016).
2.2 Candidate Free Methods
Caused by the success of semantic labeling, methods
solving instance segmentation on pixel-level are the
second option. (Zhang et al., 2015; Zhang et al.,
2016b) apply a FCN and exploit depth information
for a stable training process to generate instance can-
didates which are refined by a Markov Random Field
(MRF) which reduces the error by enforcing glo-
bal consistency. (Romera-Paredes and Torr, 2016)
propose a recurrent solution where instances of one
class are separated step by step. Another solution
for instance segmentation is to start from a seman-
tic segmentation result where predicting the contour
of an object allows to separate single instances of one
class (Ronneberger et al., 2015; van den Brand et al.,
2016; Kirillov et al., 2016). Such methods are diffi-
cult to train and have issues with split instances, e.g.,
because of occlusion. This is addressed by (Uhrig
et al., 2016) by additionally predicting the object dis-
tance and the direction to the respective object center
for each pixel. A post-processing step allows then to
detect and merge split instances. This paper builds
upon this approach which will be elaborated on in
more detail in the next section.
2.3 Multi-scale and Foveated Concepts
Multi-scale image processing, e.g., by image py-
ramids, is a widespread technique to address diffe-
rently sized objects in images. It is a key part of all po-
pular object detection frameworks (Viola and Jones,
2004; Ren et al., 2015; Liu et al., 2016). While neces-
sary to achieve good results, it can introduce a signi-
ficant computational overhead. Foveated imaging is a
concept which reduces this additional burden by spa-
tially restricting the higher resolution scales around a
fixation point (Bandera and Scott, 1989; Ude et al.,
2003; Wang and Bovik, 2006). An increasing resolu-
tion is gradually compensated by limitation to a smal-
ler spatial region, which imitates the human vision.
3 BASIC CONCEPT
The proposed method builds upon (Uhrig et al.,
2016). This approach performs instance segmenta-
tion in two stages. In the beginning, an extended
FCN8s (Long et al., 2015), based on VGG16 (Simo-
nyan and Zisserman, 2015), is used for CNN-based
pixelwise predictions of the semantic class, the depth
and the instance-based geometric direction to the in-
stance center, as shown at the top of figure 2.
These three prediction maps are then post-
processed to obtain the final instance segmentation.
The semantic label is utilized to distinguish between
instances of different semantic classes and to classify
the resulting instances in the end while the depth la-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
372
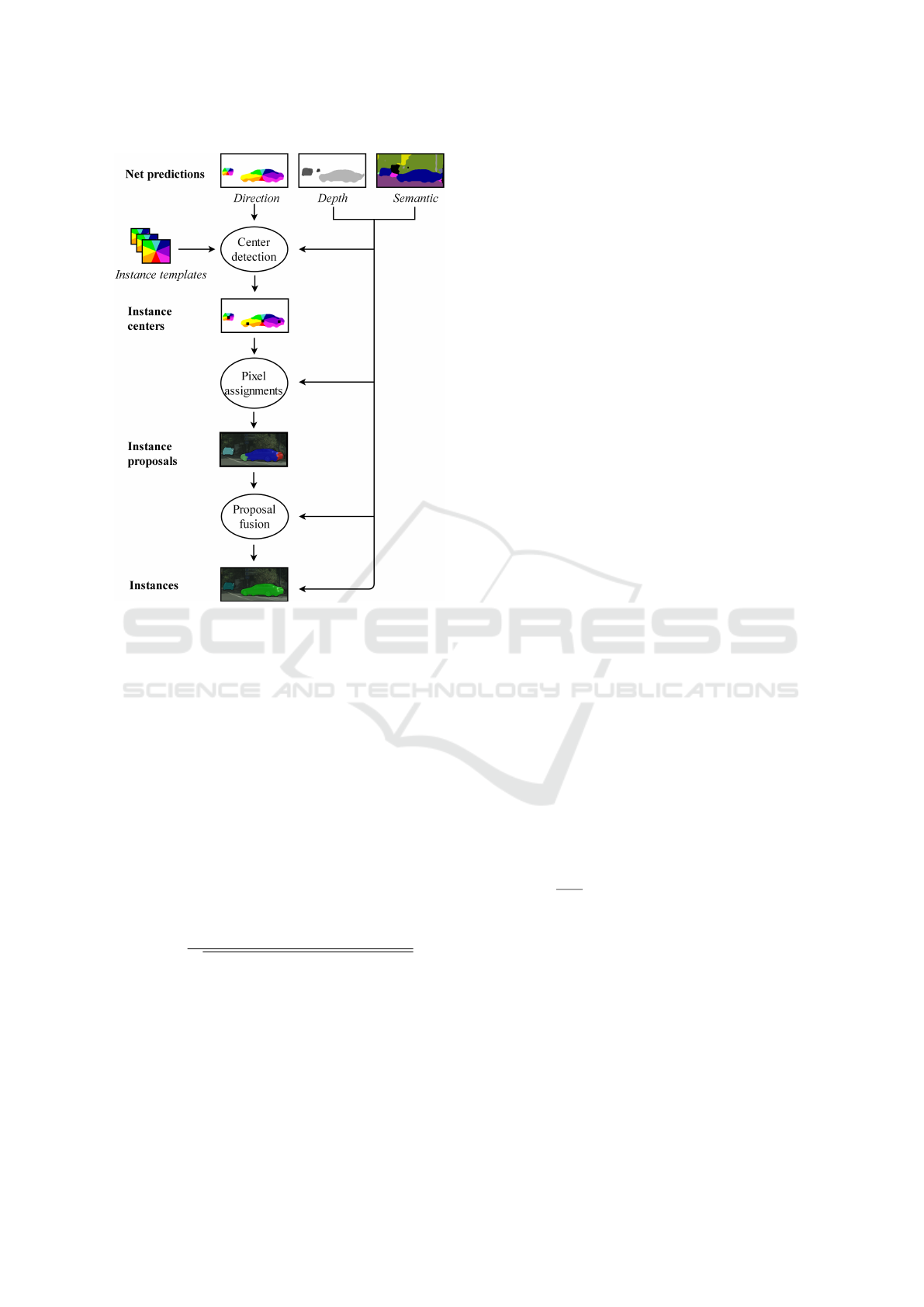
Figure 2: The post processing concept of (Uhrig et al.,
2016).
bel is mainly used to estimate each instance’s shape
and size. The direction predictions offer the direction
to the corresponding instance center of every instance
pixel which yields a high discriminativity at instance
borders.
In the post-processing, the predicted maps are
jointly employed to generate the instances by finding
the instance centers and assigning all pixels to the ap-
propriate centers. To reduce oversegmentation cau-
sed by wrong extra instance centers, instances are fu-
sed subsequently depending on their properties. Ini-
tial instance centers are determined with a template
matching procedure on the direction map using the
Normalized Cross Correlation (NCC)
R(x,y) =
∑
x
0
,y
0
F(x + x
0
,y + y
0
) · T(x
0
,y
0
)
r
∑
x
0
,y
0
F(x + x
0
,y + y
0
)
2
·
∑
x
0
,y
0
T(x
0
,y
0
)
2
(1)
to compare the angular patterns between the direction
map F and the template T. The rectangular templa-
tes are scaled according to prior knowledge and the
information from the semantic and depth map. Max-
ima in the score maps correspond to instance centers
that are found with non-maximum suppression in a
region that is equivalent to the template area. Pixels
are assigned to the closest center where semantic, pre-
dicted direction and relative location agree which re-
sults in instance proposals. Two proposals are fused
afterwards if one proposal’s accumulated direction is
biased to a neighboring proposal with similar depth
and semantic. We refer to (Uhrig et al., 2016) for furt-
her details.
4 IMPROVED ANGULAR
DISTANCE
The comparison of the template and the directions
map by NCC sometimes leads to inaccurate initial
center detections. This includes spatial shifts, missed
centers or even multiple centers per instance. These
effects may lead to inaccurate instance localization,
missed instances or over-segmented instances.
For this reason, we suggest a more robust and pre-
cise Improved Angular Distance (IAD) to compare
the angular patterns for detecting the instance centers.
In contrast to the basic NCC approach, it is invariant
to the angle’s non-linearity between −π and π.
Instead of the scalar angles, comparison of the
center directions is performed directly by the di-
rection vectors in shape of vector fields. For a single
pixel, the network predictions p
i
for each discrete an-
gular range class are used as weights for each class’s
respective direction vector r
i
to get the final direction
vector (Uhrig et al., 2016)
ρ =
∑
i
p
i
· r
i
. (2)
Consequently, the template T and the direction field
F are extended to vector fields containing the two di-
mensional normalized direction vectors ˆρ at each lo-
cation.
For a template and a direction field region of
height h and width w, the score S that indicates a
pixel’s likelihood of being an instance center is then
S(x,y) =
1
h · w
∑
x
0
,y
0
F(x + x
0
,y + y
0
)
T
· T(x
0
,y
0
). (3)
This corresponds to the cross correlation for the three-
dimensional case normalized by the number of pixels.
The normalization allows the comparison of scores of
different templates in the non-maximum suppression
step.
Leaving the pixel normalization aside, the com-
putation is equal to the inner product of the direction
vectors f and t of each pixel. Because of vectors ha-
ving unit length, this equals the cosine of the angle
between the vectors
hf,ti = cos(∠(f ,t)). (4)
Foveal Vision for Instance Segmentation of Road Images
373
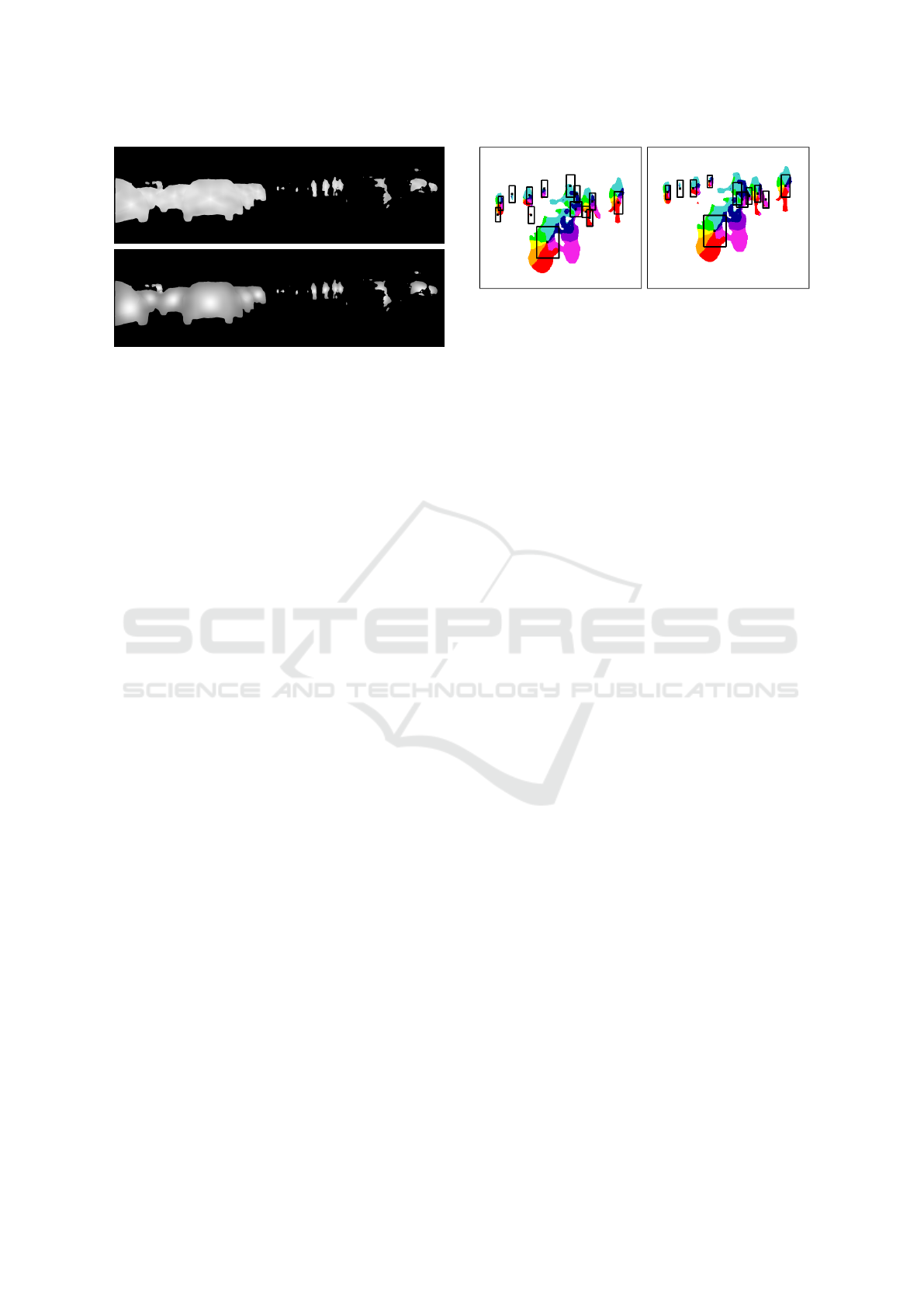
Figure 3: Score maps S when using NCC (top) and IAD
(bottom).
For this reason, small angular differences have a
small impact while opposed vectors cause significant
score reductions. So, lateral shifts of centers are pu-
nished harder leading to more accurate results in com-
parison to NCC. Additionally, this leads to more dis-
tinct maxima in the score maps which are depicted in
figure 3.
Due to normalization and the cosine function, the
overall scores ranges from -1 to 1 where a score of 1
indicates a perfect match.
There are several options to further improve the
score in equation 3. To better adjust the rectangu-
lar template to the instance shape, pixels classified as
background can be omitted from score computation.
Thereby, the rectangular template is adapted to the
real shape of the instance. Effects at the borders be-
tween instances where opposing directions occur can
be handled in two ways. The easiest way is to re-
duce the instance template size to avoid that neighbo-
ring instance pixels fall inside. We found that IAD
is more robust to smaller templates than NCC. Ad-
dressing border effects on score level is possible by
ignoring negative cosine values which indicate oppo-
sing directions occurring at the border.
5 FOVEAL STRATEGY
Foveated imaging is an intriguing but often unpopular
concept because of two common downsides for gene-
ral image analysis. First, it is often unclear how to
choose the fixation point where resolution should be
the highest. Either there is no clear point or knowing
the fixation point already solves the targeted problem,
which would be the case, e.g., in object detection. Se-
cond, applying foveal image transformations, such as
a log-polar transform (Schwartz, 1977), on the input
image alters object proportions depending on the ob-
ject location in the image. This makes the training of
a unified detection or segmentation method very dif-
Figure 4: Comparison of instance center detections with
NCC (left) and IAD (right). Color overlay for directions
is based on (Uhrig et al., 2016).
ficult.
Both issues are addressed in this work. First, the
vanishing point of the road offers an obvious choice as
fixation point in imagery captured in driving direction
from a vehicle. Second, we explicitly extract image
regions and scales instead of applying a highly non-
linear foveal image transformation to the input image.
This can also be understood as a multi-scale image
pyramid strategy with high resolution scales being
spatially focused and limited to the fixation point.
Two different solutions to determine the fixation
point in the road images are suggested:
1. Horizontally centered and vertically aligned at the
pre-calibrated horizon at fixed image coordinates.
This assumes a fixed and well aligned camera po-
sition. Extraction is quick.
2. Dynamically extracted based on the semantic
segmentation output of the Convolutional Neural
Network (CNN) at the original scale. This adapts
the fixation point according to the currently analy-
zed scene but requires a small computational over-
head.
The applied strategy to extract the dynamic fixation
point is based on the road segmentation on the whole
image. The topmost image area classified as road is
considered the vanishing point of the road and conse-
quently set as fixation point. This strategy results in
an intersection over union of 0.693 between the crop-
ped regions around the detected point and around the
ground truth vanishing point of the road. Note that
the CityScapes dataset also includes depth informa-
tion from stereo vision which offers an additional way
to determine the vanishing point. However, we decide
for a strategy working also in the absence of depth in-
formation to broaden the scope of the approach.
5.1 Fusion Methods
Foveal regions are cropped in alignment with the fixa-
tion point as visualized in figure 5. By avoiding regi-
ons centered around the fixation point, instances are
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
374
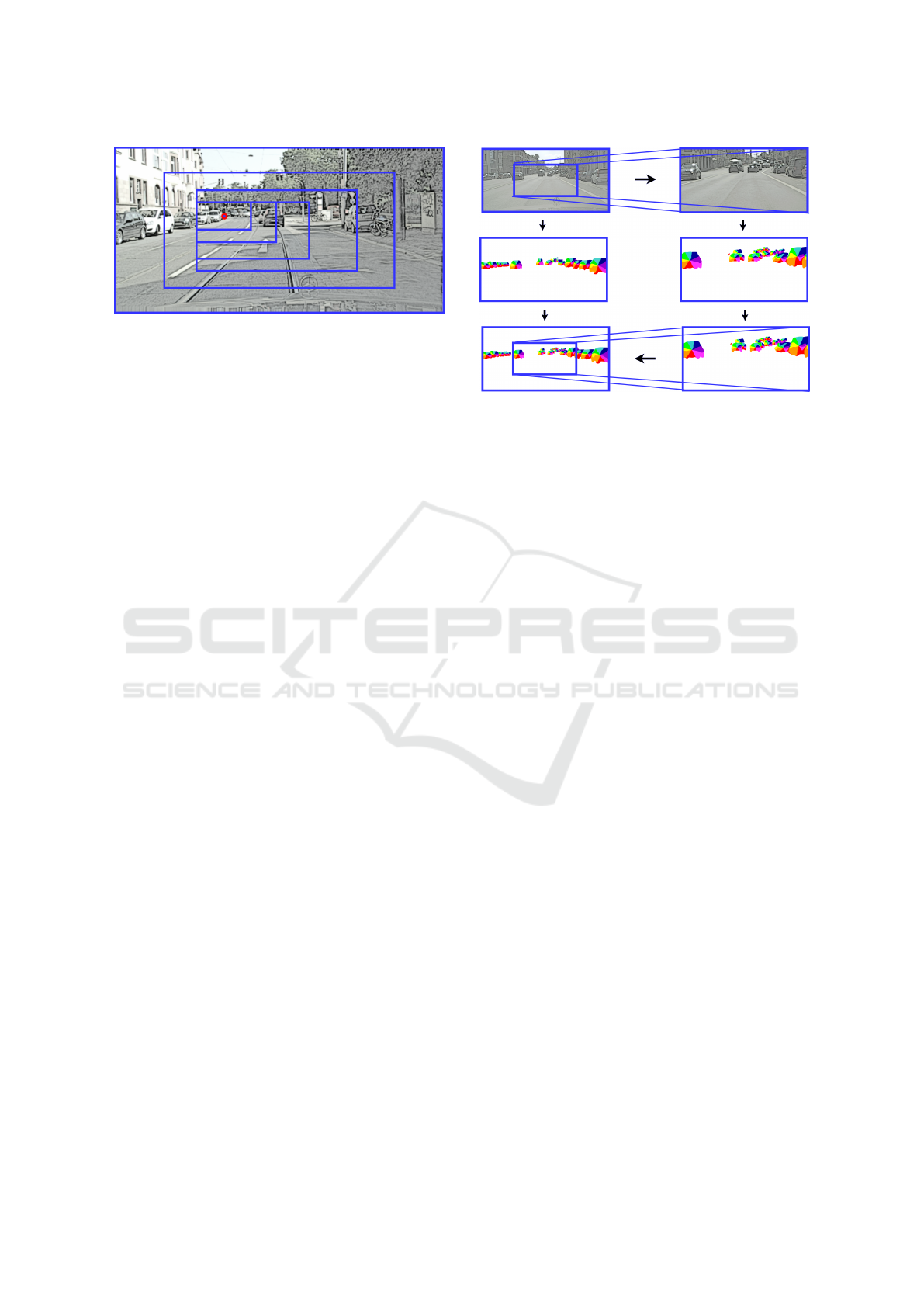
Figure 5: Foveal regions and their alignment with the fixa-
tion point.
better covered caused by the road beginning at the
bottom center of the image.
For each crop, the region is rescaled to fit the input
size of the instance segmentation CNN. Thus, small
objects at larger distances are enlarged. This better
exploits the typical scale range of objects from 40 to
140 pixels which networks pre-trained on the Image-
Net data respond to (Hu and Ramanan, 2016). The
CNN is fine-tuned separately for each foveal scale to
adjust for the differing alignment. Experiments with
a jointly trained network for all crops indicated worse
results. The post-processing template sizes are adjus-
ted accordingly to ensure consistency with the resized
objects.
The proposed foveal strategy then results in an in-
stance segmentation map for each crop, which has
the original resolution. The segmentation results of
the crops are subsequently scaled and merged into
the result of the whole image beginning with the lar-
gest crop. Three different fusion methods to combine
the crops are explored, with the first two being ge-
nerally applicable to all instance segmentation appro-
aches and the third one being specific to the chosen
base approach.
Baseline Instance Fusion. As a baseline, a crop’s
instance segmentation map simply replaces the cor-
responding part in the larger crop’s instance segmen-
tation map. To avoid instances being cut at the crop
border, instances that overlap within a small overlap-
ping zone are merged.
Improved Instance Fusion. While smaller crops al-
low to better segment the smaller objects, it is likely
that big instances are split because they significantly
exceed the typical object size range that can be de-
tected by the CNN. Additionally, there is less con-
text that the CNN can rely on if only a part of the
instance is visible in the crop. Following from this,
the baseline instance fusion might insert these split
instances even if they are correctly segmented in lar-
ger crops. This motivates an improved method to
fuse the instance segmentation maps pursuing the ob-
jective of combining bigger instances segmented at
Figure 6: Illustration of the feature fusion concept.
smaller scales and smaller instances segmented at lar-
ger scales. Merging a smaller crop into a larger crop
follows these steps:
1. Remove all instances in the larger crop that lie
completely within the smaller crop region. Keep
the remaining ones.
2. If more than 50% of an instance in the smaller
crop overlap with a remaining instance from the
larger crop
(a) then add the instance’s pixels to this remaining
instance.
(b) otherwise add the instance as a new one and
overwrite any overlap with other instances.
This strategy keeps the larger instances from the lar-
ger crops while still exploiting the finer details in the
smaller crops, both in terms of better object contours
as well as small objects.
Feature Fusion. Both previous instance fusions are
independent of the instance segmentation algorithm.
Specific to the basic method of in this work, scale fu-
sion can also be done earlier, i.e., on the semantic,
depth and direction feature map. Because the post-
processing is tolerant to minor inaccuracies, the dif-
ferent feature map crops are scaled accordingly and
just copied into each other without any border effect
handling. These fused maps are then regularly post-
processed. Figure 6 illustrates this strategy.
6 EXPERIMENTS
The experiments are performed on the Cityscapes da-
taset (Cordts et al., 2016) following the official in-
stance segmentation evaluation protocol. Instance
segmentation results are thus given as average pre-
cision (AP) and AP
50%
, where AP
50%
denotes the
average precision for a fixed instance overlap thres-
Foveal Vision for Instance Segmentation of Road Images
375
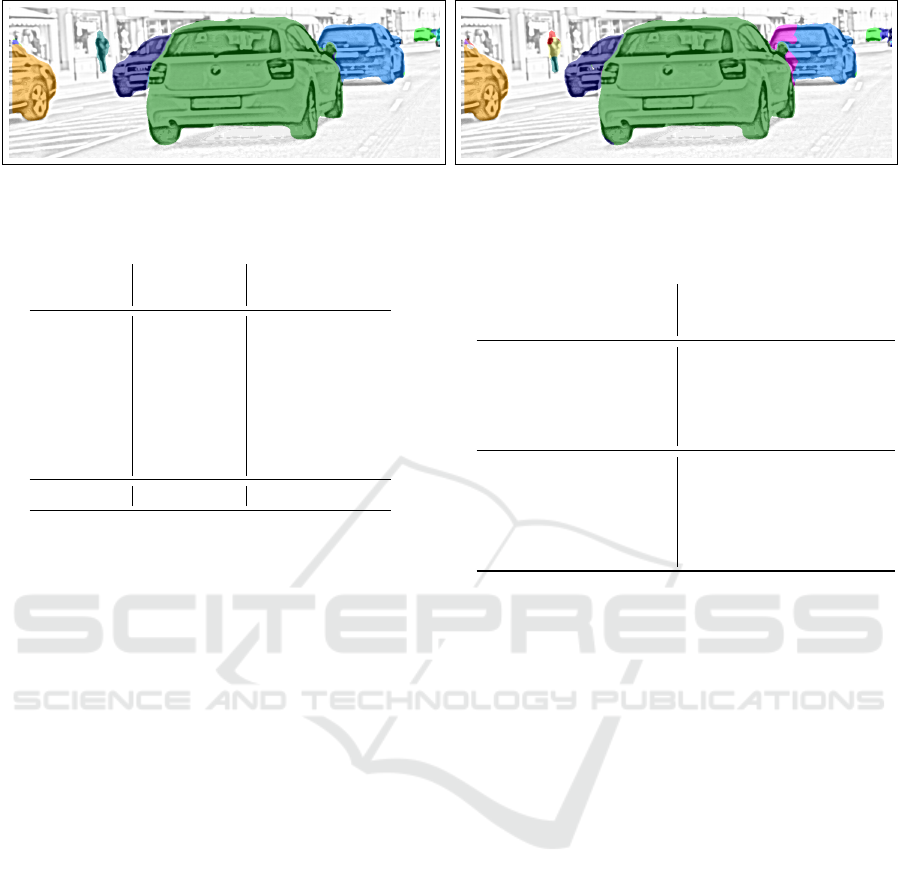
Figure 7: Comparison of instance segmentation improvement by IAD (left) compared with NCC (right).
Table 1: Evaluation of the IAD compared to the NCC base-
line on Cityscapes val. Numbers in percent.
NCC IAD NCC IAD
AP AP AP
50%
AP
50%
person 7.7 11.0 20.9 27.4
rider 7.4 8.8 25.3 26.9
car 22.0 24.5 38.6 40.6
truck 8.3 11.9 17.1 21.5
bus 15.8 17.3 35.5 34.8
train 7.3 10.1 14.5 22.0
motorcycle 5.3 7.0 16.3 19.0
bicycle 5.8 6.4 19.0 20.2
mean 10.0 12.1 23.4 26.6
hold in terms of the Jaccard index (intersection over
union) of 0.5. The CNN is trained on the training
set containing 2,975 images. Method optimization is
performed on the 500 image validation set. The test
set with 1,525 images serves for the final evaluation
where tests have to be performed via the official da-
taset website because no annotations are released for
this set. Method validation will be performed against
the reimplemented baseline of (Uhrig et al., 2016).
The base network is trained the same way followed
by the same post-processing strategy, which results in
a comparable overall performance with an AP of 9.9
(theirs) versus 10.0 (ours) on the validation set.
6.1 Angular Distance
Replacing the NCC by the IAD in the post-processing
for instance center detection, promises to improve the
results because of the more robust and tolerant stra-
tegy. The results in table 1 clearly confirm this across
all classes in the regular setting. Overall, results are
improved from 10.0 to 12.1 percent. An example
comparison of instance segmentation results between
both options is depicted in figure 7. It indicates less
decomposed instances for the IAD.
6.2 Multi-scale Analysis
Even though the Cityscapes dataset has a considera-
ble image resolution of 2048 × 1024 pixels, far ob-
jects are mostly below 30 × 30 pixels in size. This
Table 2: Comparison of fixation point search strategies,
number of foveal crops and fusion strategy on Cityscapes
val. All numbers are in percent and larger is better.
foveal setting metric
feature
fusion
baseline
instance
fusion
improved
instance
fusion
none AP 12.1 - -
fixed, 1 crop AP 13.3 13.1 14.4
fixed, 2 crops AP 8.9 8.4 13.8
dynamic, 1 crop AP 12.6 12.5 14.1
dynamic, 2 crops AP 11.1 10.9 14.0
none AP
50%
26.6 - -
fixed, 1 crop AP
50%
29.3 28.2 29.8
fixed, 2 crops AP
50%
20.8 19.0 29.1
dynamic, 1 crop AP
50%
28.3 27.7 28.6
dynamic, 2 crops AP
50%
26.7 25.6 28.7
motivates the proposed foveal strategy which enlar-
ges the objects into the typical favorable range of the
analyzing CNN. Due to the typical high response of
ImageNet pre-trained networks to objects in the scale
range of 40 to 140 pixels, an overly dense scale sam-
pling of the cropped foveal regions is unnecessary.
We decide for a scaling factor of 2 between crops,
i.e., each region of interest has half the size of the
previous one. The cropped regions are then upsca-
led to push object sizes into the favorable range of
the CNN. Table 2 shows the results of the compari-
son between pre-calibrated and dynamically selected
fixation points as well as an analysis of the number
of useful crops. It shows that the dynamic selection
becomes important if crops get smaller and more fo-
cused on small image regions. These regions must
then be selected well to improve performance. When
only using a single crop, the pre-calibrated strategy
is sufficient because the vanishing point of the road
is usually already inside the crop which renders the
dynamic strategy unnecessary. Regarding the fusion
strategy, feature fusion and the improved instance fu-
sion are consistently superior to the baseline strategy.
Also, the improved instance fusion outperforms the
method specific feature fusion. Overall, the valida-
tion AP is increased from 12.1 to 14.4 percent.
Having a look at instance segmentation results for
different object categories in table 3 indicates that the
improved instance fusion better addresses the large
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
376
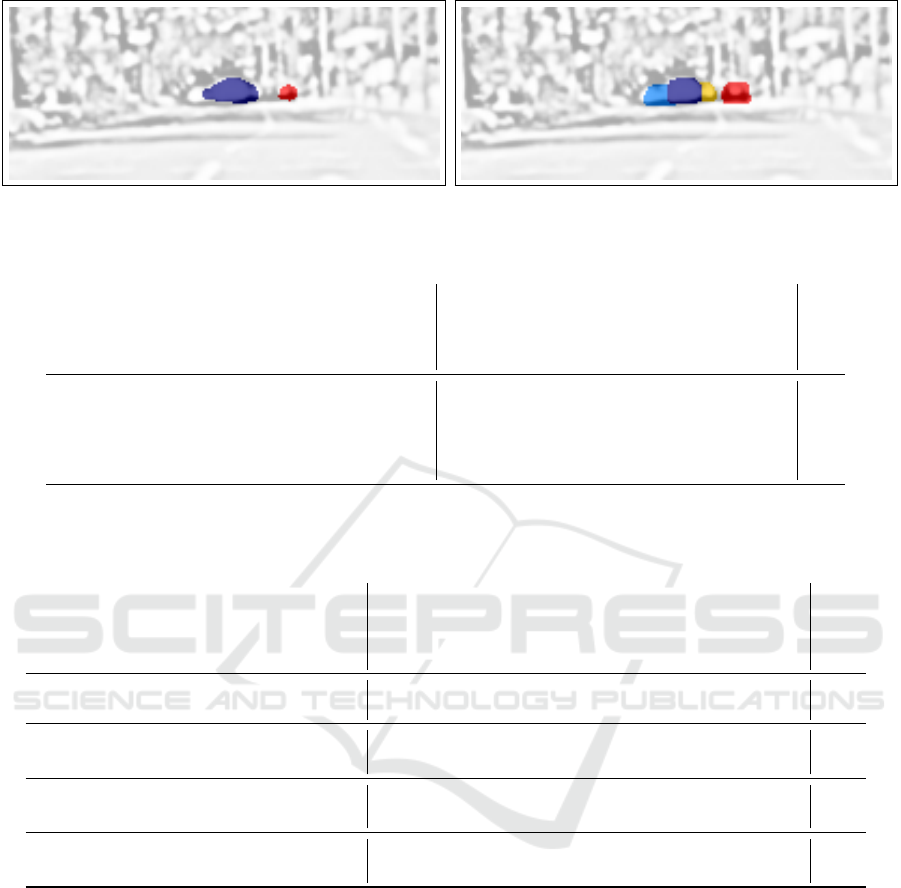
Figure 8: Result of the foveal strategy (left) on an image region where non-foveal processing detected no instances. The
ground truth is given on the right for reference.
Table 3: Detailed results for selected foveal strategies on Cityscapes val. All numbers are in percent and larger is better.
foveal setting fusion method metric
person
rider
car
truck
bus
train
motorcycle
bicycle
mean
none - AP 11.0 8.8 24.5 11.9 17.3 10.1 7.0 6.4 12.1
fixed, 1 crop improved instance fusion AP 13.2 11.1 25.8 14.5 22.9 11.2 8.2 8.1 14.4
fixed, 1 crop feature fusion AP 14.4 11.7 27.8 8.7 19.0 9.1 8.2 7.7 13.3
dynamic, 1 crop improved instance fusion AP 12.9 10.7 25.1 14.0 23.7 10.3 8.1 7.7 14.1
dynamic, 1 crop feature fusion AP 13.9 11.7 26.5 7.8 17.9 7.6 8.4 7.1 12.6
Table 4: Instance-level segmentation results on Cityscapes test. Comparison of the published class-based performance of the
basic concept (Uhrig et al., 2016) and our best performing method including IAD, the fixed foveal strategy with 1 crop and
improved instance fusion. All numbers are in percent and larger is better.
metric
person
rider
car
truck
bus
train
motorcycle
bicycle
mean
basic concept (Uhrig et al., 2016) AP 12.5 11.7 22.5 3.3 5.9 3.2 6.9 5.1 8.9
Ours AP 13.4 11.4 24.5 9.4 14.5 12.2 8.0 6.7 12.5
basic concept (Uhrig et al., 2016) AP
50%
31.8 33.8 37.8 7.6 12.0 8.5 20.5 17.2 21.1
Ours AP
50%
31.5 29.7 40.0 16.0 23.8 21.7 19.2 19.9 25.2
basic concept (Uhrig et al., 2016) AP
100m
24.4 20.3 36.4 5.5 10.6 5.2 10.5 9.2 15.3
Ours AP
100m
24.5 19.6 39.3 14.5 24.2 18.5 11.1 11.1 20.4
basic concept (Uhrig et al., 2016) AP
50m
25.0 21.0 40.7 6.7 13.5 6.4 11.2 9.3 16.7
Ours AP
50m
24.7 20.2 42.5 17.2 27.6 21.8 11.7 11.3 22.1
object classes as intended. By avoiding to split ob-
jects, such as trucks or trains, at crop borders, seg-
mentation significantly improves. This is opposing
to the feature fusion strategy where performance for
these classes drops heavily caused by split instances.
Finally, the best-performing combination is com-
pared with the published results of the basic method
on the Cityscapes test dataset. Significant overall im-
provement is achieved. Only the results for the person
and rider class show mixed results, indicating that the
CNN used by (Uhrig et al., 2016) is significantly bet-
ter at detecting people at the cost of all other classes.
7 CONCLUSION
Using an angular distance which is unaffected by the
−π/π discontinuity improved instance segmentation
results significantly. Further performance progress
was made by a generally applicable foveal image ana-
lysis strategy with a multi-scale focus on the vanis-
hing point of the road. This allowed to better dis-
tinguish far objects which are typically small in the
image. Overall, the performance on the Cityscapes
test dataset was improved by both measures from 8.9
to 12.5 percent average precision.
Foveal Vision for Instance Segmentation of Road Images
377

REFERENCES
Arnab, A. and Torr, P. (2017). Pixelwise Instance Segmen-
tation with a Dynamically Instantiated Network. In
Conference on Computer Vision and Pattern Recogni-
tion.
Bandera, C. and Scott, P. D. (1989). Foveal machine vi-
sion systems. In Systems, Man and Cybernetics, 1989.
Conference Proceedings., IEEE International Confe-
rence on, pages 596–599. IEEE.
Chen, L.-C., Fidler, S., Yuille, A. L., and Urtasun, R.
(2014). Beat the mturkers: Automatic image labeling
from weak 3d supervision. In Conference on Compu-
ter Vision and Pattern Recognition, pages 3198–3205.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The Cityscapes Dataset for Semantic Urban
Scene Understanding. In Conference on Computer Vi-
sion and Pattern Recognition.
Dai, J., He, K., and Sun, J. (2016). Instance-aware Seman-
tic Segmentation via Multi-task Network Cascades. In
Conference on Computer Vision and Pattern Recogni-
tion.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we re-
ady for autonomous driving? The KITTI vision ben-
chmark suite. In Conference on Computer Vision and
Pattern Recognition.
Girshick, R. (2015). Fast R-CNN. In International Confe-
rence on Computer Vision.
Hayder, Z., He, X., and Salzmann, M. (2016). Shape-
aware Instance Segmentation. arXiv preprint
arXiv:1612.03129.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask R-CNN. arXiv preprint arXiv:1703.06870.
Hu, P. and Ramanan, D. (2016). Finding tiny faces. arXiv
preprint arXiv:1612.04402.
Kirillov, A., Levinkov, E., Andres, B., Savchynskyy, B., and
Rother, C. (2016). InstanceCut: from Edges to Instan-
ces with MultiCut. arXiv preprint arXiv:1611.08272.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In Euro-
pean Conference on Computer Vision, pages 740–755.
Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C.-Y., and Berg, A. C. (2016). SSD: Single shot mul-
tibox detector. In European Conference on Computer
Vision, pages 21–37. Springer.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully
Convolutional Models for Semantic Segmentation. In
Conference on Computer Vision and Pattern Recogni-
tion.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. In Advances in Neural Informa-
tion Processing Systems, pages 91–99.
Romera-Paredes, B. and Torr, P. H. S. (2016). Recurrent
instance segmentation. In arXiv:1511.08250.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In MICCAI.
Schwartz, E. L. (1977). Spatial mapping in the primate
sensory projection: analytic structure and relevance to
perception. Biological cybernetics, 25(4):181–194.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions.
Ude, A., Atkeson, C. G., and Cheng, G. (2003). Com-
bining peripheral and foveal humanoid vision to de-
tect, pursue, recognize and act. In Intelligent Robots
and Systems, 2003.(IROS 2003). Proceedings. 2003
IEEE/RSJ International Conference on, volume 3, pa-
ges 2173–2178. IEEE.
Uhrig, J., Cordts, M., Franke, U., and Brox, T. (2016).
Pixel-level encoding and depth layering for instance-
level semantic segmentation. In German Conference
on Pattern Recognition.
van den Brand, J., Ochs, M., and Mester, R. (2016).
Instance-level Segmentation of Vehicles using Deep
Contours. In Asian Conference on Computer Vision.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International Journal of Computer Vision,
57(2):137–154.
Wang, Z. and Bovik, A. C. (2006). Foveated image and
video coding. Digital Video, Image Quality and Per-
ceptual Coding, pages 431–457.
Zhang, Z., A., S., S., F., and R., U. (2015). Monocular
object instance segmentation and depth ordering with
CNNs. In International Conference on Computer Vi-
sion.
Zhang, Z., Fidler, S., and Urtasun, R. (2016a). Instance-
level segmentation for autonomous driving with deep
densely connected mrfs. In Conference on Computer
Vision and Pattern Recognition, pages 669–677.
Zhang, Z., S., F., and R., U. (2016b). Instance-level segmen-
tation with deep densely connected MRFs. In Confe-
rence on Computer Vision and Pattern Recognition.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
378
