
Anomaly Detection in Industrial Software Systems
Using Variational Autoencoders
Tharindu Kumarage, Nadun De Silva, Malsha Ranawaka,
Chamal Kuruppu and Surangika Ranathunga
Department of Computer Science and Engineering, University of Moratuwa, Katubedda, Sri Lanka
Keywords:
Anomaly Detection, Industrial Software Systems, Variational Autoencoder, VAE, DBSCAN.
Abstract:
Industrial software systems are known to be used for performing critical tasks in numerous fields. Faulty con-
ditions in such systems can cause system outages that could lead to losses. In order to prevent potential system
faults, it is important that anomalous conditions that lead to these faults are detected effectively. Nevertheless,
the high complexity of the system components makes anomaly detection a high dimensional machine learning
problem. This paper presents the application of a deep learning neural network known as Variational Au-
toencoder (VAE), as the solution to this problem. We show that, when used in an unsupervised manner, VAE
outperforms the well-known clustering technique DBSCAN. Moreover, this paper shows that higher recall can
be achieved using the semi-supervised one class learning of VAE, which uses only the normal data to train the
model. Additionally, we show that one class learning of VAE outperforms semi-supervised one class SVM
when training data consist of only a very small amount of anomalous samples. When a tree based ensemble
technique is adopted for feature selection, the obtained results evidently demonstrate that the performance of
the VAE is highly positively correlated with the selected feature set.
1 INTRODUCTION
Software systems are becoming increasingly common
in industrial applications, being utilized for solving
various complicated problems. Most of the applica-
tions of industrial software systems are in critical sce-
narios where any failure would result in huge losses.
An industrial software system is a combination of
multiple components, each consisting of a large num-
ber of attributes. Each attribute in a component is a
statistical measure of a certain aspect of the compo-
nent. For example, queue size of requests received by
a component is an indication of the network connec-
tion to the component, as well as the memory usage of
the component. Monitoring these attributes manually
or using a rule based system for anomaly detection is
not feasible or maintainable in the long run. Hence,
automated mechanisms for anomaly detection are re-
quired.
One widely incorporated approach for detecting
faults automatically in industrial software systems is
based on machine learning techniques. The tech-
niques that have been discovered over the years can
be divided into supervised, semi-supervised, and un-
supervised (Agrawal and Agrawal, 2015).
Among them, supervised and semi-supervised
methods have proven to be the best performing
anomaly detection techniques. However, in order
to apply a supervised technique for an industrial
software system in a production environment, large
datasets containing system statistics need to be la-
beled as anomalous and non-anomalous before the
training phase (Ranaweera et al., 2017). Moreover,
new datasets would require being labeled periodically
to ensure that the models used for detecting anomalies
are relevant to the current conditions.
Thus, unsupervised techniques are the most prac-
tical solution that can be used for anomaly detection
in industrial software systems. Most of the unsuper-
vised clustering and deep learning techniques intro-
duced over the years have been used for anomaly de-
tection in general (Willsky, 1976; Tan et al., 2012;
Schneider et al., 2015). Out of the unsupervised
deep learning techniques, Autoencoders are the most
known method for anomaly detection in many do-
mains (Sakurada and Yairi, 2014). However, these
novel deep learning techniques have not been used for
anomaly detection in the industrial software systems
domain.
This paper presents a machine learning framework
440
Kumarage, T., Silva, N., Ranawaka, M., Kuruppu, C. and Ranathunga, S.
Anomaly Detection in Industr ial Software Systems - Using Variational Autoencoders.
DOI: 10.5220/0006600304400447
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 440-447
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

based on Variational Autoencoders (VAE) for detect-
ing anomalies in industrial software systems. VAE
shares the same decoder and encoder structure of a
normal Autoencoder. However, here the encoder acts
as a variational inference network, which makes the
VAE outperform normal Autoencoders (Kingma and
Welling, 2014; An and Cho, 2015).
The industrial software system we use is a com-
mercial stock trading platform. We show that VAE
outperforms DBSCAN (Density Based Spatial Clus-
tering of Applications with Noise), which is a density
based clustering method popularly used in anomaly
detection. Moreover, this paper presents the applica-
tion of one class learning method to improve the recall
of the VAE. According to this method, VAE is trained
only using the normal data and then used to detect
previously unseen anomalous data points. This semi-
supervised VAE outperforms the semi-supervised one
class SVM classification technique when the anomaly
ratio of the training data is trivial. Furthermore, pre-
vious research that employed Autoencoders has not
exploited any feature selection since Autoencoders
are said to be usable in high dimensional problems
(Sakurada and Yairi, 2014; Aygun and Yavuz, 2017).
However, in contrary, our research demonstrates how
the performance of the VAE can be extensively in-
creased by selecting discriminative features, which
supports modeling the latent variables more accu-
rately.
The rest of the paper is organized as follows.
Section 2 describes the related work corresponding
to anomaly detection in industrial software systems,
and section 3 describes the industrial software sys-
tem used for the experiments. Anomaly detection is
outlined in section 4, and section 5 discusses the im-
portance of feature selection for the VAE. Section 6
presents the evaluation, followed by the conclusion in
Section 7.
2 RELATED WORK
2.1 Anomaly Detection
Traditional methods for anomaly detection involved
probabilistic (Guo et al., 2006), and statistical mod-
els (Id´e and Kashima, 2004). Although these meth-
ods exhibited agreeable results, they were not scalable
due to the increasing complexity of the systems con-
cerned.
With the breakthrough of machine learning tech-
niques used in various domains, new supervised,
semi-supervised and unsupervised anomaly detection
techniques for detecting anomalies were also intro-
duced. Supervised classification techniques such as
Decision trees, K-nearest neighbors algorithm, Ran-
dom Forest algorithms (Alonso et al., 2011), Naive
Bayes and Support Vector Machines (Hu et al., 2003)
have been used for anomaly detection. All these
supervised techniques have been proven to be quite
powerful in detecting anomalies.
Many semi-supervised learning techniques have
also been used for detecting anomalies in several do-
mains. Among these techniques, one class SVM and
Autoencoders with one class learning have shown
promising results (Eskin et al., 2002; Heller et al.,
2003; An and Cho, 2015). One class SVM uses only
the normal data and within a given ratio, anomalies
are predicted. This method has been successfully
adopted in intrusion detection systems (Wang et al.,
2004), as well as in high dimensional and large scale
anomaly detection problems (Erfani et al., 2016).
However, due to the practical problem of label-
ing data for supervised anomaly detection, unsuper-
vised methods such as clustering and deep learning
neural networks came into use (Amer and Abdennad-
her, 2011; Dean et al., 2012). However these methods
highly depend on the features relevant to the domain
of execution.
2.2 Anomaly Detection in Industrial
Software Systems
Anomaly detection in industrial software system do-
main has been conducted using both supervised and
unsupervised machine learning techniques. When
considering the supervised techniques, SVM clas-
sification based anomaly detection has displayed
good results on an industrial trading software sys-
tem (Ranaweera et al., 2017).
Moreover, there is some research on machine
learning based approaches for unsupervised anomaly
detection in industrial software systems such as Tree
Augmented Naive Bayesian networks (Willsky, 1976;
Tan et al., 2012), Hidden Markov models (Willsky,
1976; Alonso et al., 2011), and restricted Boltzmann
machines (Schneider et al., 2015).
2.3 Variational Autoencoders for
Anomaly Detection
Among the unsupervised learning techniques, deep
learning neural network based techniques are cur-
rently gaining the momentum (Xu et al., 2017). Au-
toencoder neural networks are one of the most promi-
nent deep learning based anomaly detection technique
Anomaly Detection in Industrial Software Systems - Using Variational Autoencoders
441
that had been used in applications such as network in-
trusion detection, medical diagnosis, and credit card
fraud detection (Sakurada and Yairi, 2014; Aygun and
Yavuz, 2017). One of the most important features
of the Autoencoder is that it can employ nonlinear
dimensionality reduction while learning features. It
is shown that Autoencoders perform better than the
traditional principal component analysis (PCA) ap-
proach for anomaly detection using dimensionality
reduction (Sakurada and Yairi, 2014).
There had been different variations of Autoen-
coders introduced over the years. VAE (Kingma
and Welling, 2014) is one variation that had shown
promising results in anomaly detection. The advan-
tage of a VAE over the traditional Autoencoder is that
it uses theoretically sound variance inference for gen-
erating stochastic latent variables rather than deter-
ministic latent variables as in Autoencoders (An and
Cho, 2015; Walker et al., 2016; Doersch, 2016).
3 INDUSTRIAL SOFTWARE
SYSTEM
The anomaly detection approach of this research uses
the data corresponding to an industrial trading soft-
ware system, in which three predefined components
are used. Namely, the components incorporated are
Native Gateway (NG), Sequencer, and Matching En-
gine (ME). The Native Gateway component handles
the communication between external parties and the
trading software system, while Sequencer controls
and manages the sequence of the multiple inputs pro-
vided by the Native Gateway and passes them to the
Matching Engine. Matching Engine is the component
that is responsible for matching the input orders with
the stocks. Hence, ME handles a larger part of the
computing process within the trading system. More-
over, due to the complex functionality of these com-
ponents, each of these consists of a large number of
attributes and parameters as shown in Table 1. These
three components work together in the trading sys-
tem, to perform the necessary calculations required
for the use cases of the trading system. Moreover,
these components work together to achieve the tasks
by communicating over a network.
Table 1: Main components and dimensionality.
Component Dimension
Native Gateway 78
Sequencer 110
Matching Engine 357
4 METHODOLOGY
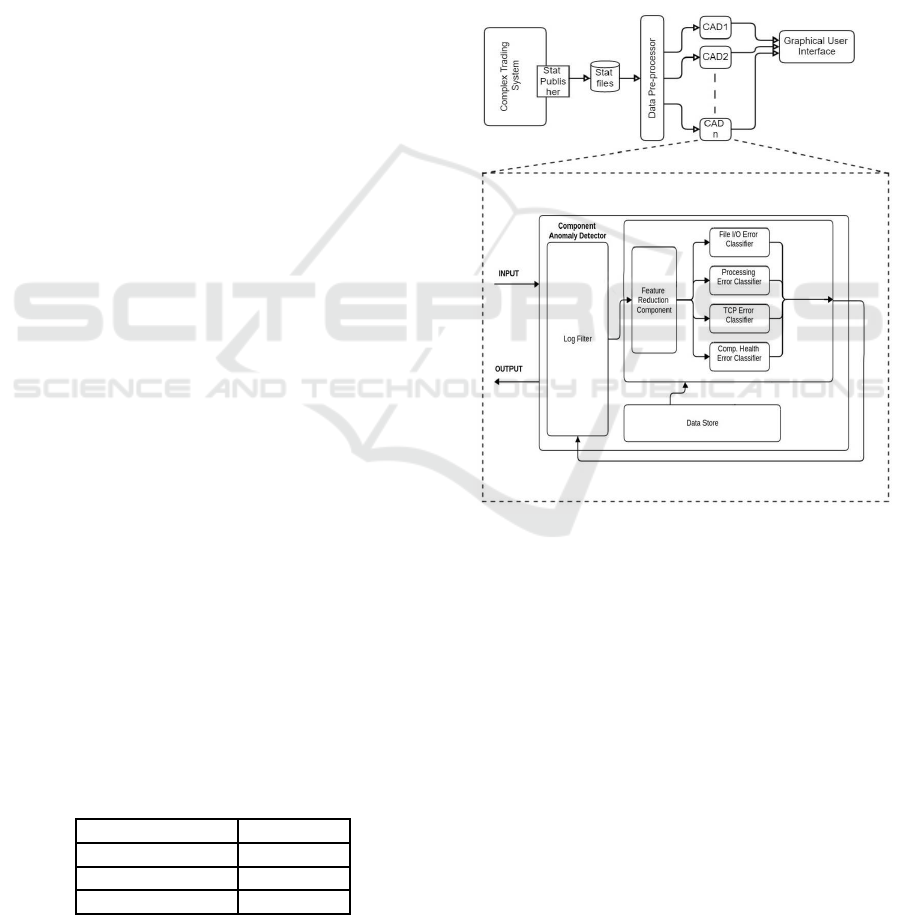
4.1 System Overview
We present an extension of a previous anomaly detec-
tion work done on the same industrial trading soft-
ware system (Ranaweera et al., 2017). Figure 1
demonstrates the architecture used in the previous
research, and we are exploiting the same architec-
ture with the modification of replacing the supervised
SVM algorithm used in different classifiers in the
component anomaly detector (CAD) with unsuper-
vised DBSCAN and VAE anomaly detectors.
Figure 1: Architecture of the anomaly detection framework
(Source: (Ranaweera et al., 2017)).
4.2 Variational Autoencoder (VAE)
4.2.1 Structure of the VAE
VAE has the structure of a normal Autoencoder
and consists of three main components (Kingma and
Welling, 2014; An and Cho, 2015).
1. Encoder neural network (Recognition model) -
This network maps the given data instances x onto
latent variable distribution z, given parameters φ.
This is achieved by modeling the parameters of
the approximate posterior q(z|x,Φ).
2. Decoder neural network (Generative model) -
This network maps the randomly sampled latent
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
442

variable z onto a distribution of x, given parame-
ters θ. This is achieved by modeling the parame-
ters of the probabilistic graphical model p(x|z,θ),
which implies the the likelihood of the data x
given the latent variable z.
3. Loss function as given in equation 1.
L(i) = E
q
φ
(z)
[ln(p(x|z, θ)) ] − KL(q
φ
(z|x)||p
θ
(z))
(1)
Here, the first term in equation 1 helps in min-
imizing the error between reconstructed output and
the original input, as in a normal Autoencoder. The
second term, by taking the Kullback-Leibler (KL)
divergence, forces the approximate posterior q
φ
(z|x)
and prior distribution p
θ
(z) to become similar values,
which prevents the stochastic hidden variables from
being deterministic as in the normal Autoencoder.
4.2.2 Anomaly Detection Procedure of the VAE
Basic training procedure of the VAE is that, given
the training data X:{x(1), x(2), ..., x(m)} where x(i)
ε R
D
, network tries to regenerate the given input at
the output
ˆ
X:{ˆx(1), ˆx(2), ..., ˆx(m)} by identifying the
latent variables Z that correspond to the data. If it
is assumed that there exists a significant difference
between the normal samples and anomalous sam-
ples, the error in reconstructing anomalous samples
is higher than that of the normal samples (Sakurada
and Yairi, 2014). Due to this reason, after training
the VAE using the training dataset, and while testing
the model on test dataset, anomalous data tend to give
a higher reconstruction error, which is calculated ac-
cording to the equation 2. Moreover, by defining a
threshold value for the reconstruction error, anoma-
lous data can be identified as the data points that have
a reconstruction error above the defined threshold.
E(i) =
v
u
u
t
D
∑
j=0
(x
j
(i) − ˆx
j
(i))
2
(2)
4.2.3 Semi-supervised One Class Learning
According to equation 2, data instances that tend to
give a higher reconstruction error are classified as
anomalies and the reason for higher reconstruction er-
ror is that the VAE is unable to reconstruct those given
instances correctly. In order to exploit this charac-
teristic of the VAE, we adopted a one class learning
technique.
In this one class learning technique, all the
datasets corresponding to the three components were
divided into normal and anomalous based on the la-
bels, and only the normal proportion of data was used
for unsupervised training of the VAE.
4.3 Density based Spatial Clustering of
Applications with Noise (DBSCAN)
Density based techniques had been best at identify-
ing clusters of arbitrary shapes and therefore they are
the best performing algorithms for detecting local out-
liers. Moreover, density based techniques are quite
robust in the presence of noise. This makes density
based techniques the best clustering based technique
for anomaly detection (Kotsiantis and Pintelas, 2004).
DBSCAN had been one of the most used density
based algorithms and had performed well over the
years (Loh and Park, 2014; Shekhawat and Sharma,
2017). There had been many variants of DBSCAN
that performed well in different domains. However,
the key underlying concept of anomalies had been the
same in all of these techniques.
In DBSCAN, a data point is clustered based on
whether the number of data points that exist within
a predefined radius is higher than a predefined num-
ber of data points (Yang et al., 2014). This marks the
data point clusters that have less number of data points
than the required amount within the defined radius, as
anomalous data points.
4.3.1 Anomaly Detection Procedure of DBSCAN
When classifying new data points as anomalous or
not, the number of data points within the predefined
radius from the new data point is counted, and if the
number of data points is higher than the predefined
number of data points, the new data point is labeled
as non-anomalous, and vice versa.
4.4 Dealing with High Dimensionality
The industrial software system components used in
this research consist of a large number of features as
shown in Table 1, which makes the anomaly detection
procedure quite complex.
In order to overcome this problem, according to
a previous research executed on the same industrial
trading software system (Ranaweera et al., 2017), a
tree ensemble method based on randomized decision
trees was utilized to select the most suitable features
that correspond to each component.
As shown in Table 2, we obtained a reduced fea-
ture set by using the tree based ensemble.
Anomaly Detection in Industrial Software Systems - Using Variational Autoencoders
443
Table 2: Dimensionality of the reduced feature set.
Component Dimension
Native Gateway 5
Sequencer 10
Matching Engine 10
5 VAE WITH FEATURE
SELECTION
Latent variables inferred by the VAE hold a great im-
portance in the anomaly detection procedure, since
these latent variables are the building blocks of the
generative model. If the inferred latent variable dis-
tribution is capable of identifying the different classes
within the data, differentiating anomalous from nor-
mal data evidently becomes more accurate. Most
of the supervised machine learning techniques try to
achieve this using labeled data. When the latent vari-
able distribution becomes accurate, result from unsu-
pervised anomaly detection tends to become as accu-
rate as in supervised learning algorithms.
According to the literature, VAE has shown good
performance for many domains and high dimensional
benchmarking datasets (An and Cho, 2015). How-
ever, we argue that the performance of the VAE can
be improved by identifying the best features in the
dataset, which would lead to a more expressive la-
tent model of the data. Hence, a feature selection is
adopted to extract the most suitable set of features,
which leads to a higher information gain while max-
imizing the posterior probability of P(X|z, θ). As a
result, the recognition model of the VAE tends to dis-
cover the best approximation of the latent variable
distribution, and consequently probability of each
data instance X of the training dataset, as shown in
equation 3 gets maximized. This is mainly due to
the accuracy increases of the generative model with
respect to the high expressiveness of the latent vari-
ables, which results in increased likelihood of the data
X given latent variable z. Thus, a VAE that has a high
performinggenerativemodel can be designed with the
support of feature selection, leading to a higher ac-
curacy of detecting anomalies in industrial software
systems.
In next section, we empirically show that VAE
does perform better with a reduced feature set.
P(X) =
Z
P(X|z, θ)P(z)dz (3)
6 EVALUATION
6.1 Dataset Generation
The datasets used in the experiments were generated
in a controlled environment using an industrial soft-
ware system that is used by a company in the trad-
ing systems domain. As mentioned earlier, controlled
environment contained three main components run-
ning to generate the required datasets; Native Gate-
way, Sequencer, and Matching Engine. Datasets for
each component were separated into training and test
datasets. The test datasets were labeled so that they
can be used for evaluating the anomaly detection tech-
niques. The dataset that was generated is identical to
the datasets used in the experiments done for the re-
search conducted on a supervised approach for detect-
ing anomalies (Ranaweera et al., 2017). Dataset cor-
responding to each component contains 20000 data
samples on average.
6.2 Experimental Results
Results were obtained for the three components sep-
arately. The training sets were used for training the
VAE and DBSCAN models, after which both models
were evaluated using the test datasets.
A ZeroR classifier was used as a baseline classi-
fier (assigning normal tag to all the data entries) in
order to mark a lower bound for the accuracy. Results
obtained from the experiments were analyzed based
on the Recall, Precision, F1 Score, and the Accuracy.
For each component, the scores were compared, un-
der these different experiments. The experiment pro-
cedure of this research is as below.
• Tested both multi-class learning (noted as M-c in
the table) and one class learning (noted as as O-c
in the table) of the VAE with respect to the dataset.
Performance evaluation of the two learning meth-
ods can be found in Table 3. Moreover, one class
and multi-class VAE were tested upon the selected
features from the tree based ensemble. This eval-
uation also can be found in Table 3.
• Tested both multi-class VAE and DBSCAN with
and without feature selection(FS). Evaluation of
the obtained performance can be found in Table
4.
• Tested a similar semi-supervised anomaly detec-
tion technique known as one class SVM against
the one class learning of VAE in order to evalu-
ate the usability in a practical environment. This
experiment was done with and without feature se-
lection. Results are shown in Table 5.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
444
Table 3: Performance evaluation of Variational Autoencoder
Comp Desc
Recall Precision F1 Accuracy
M-c O-c M-c O-c M-c O-c M-c O-c Base
ME
Without
FS
0.35 0.77 0.66 0.42 0.46 0.55 0.35 0.77 0.71
With
FS
0.96 0.97 0.96 0.92 0.94 0.94 0.97 0.97 0.71
SEQ
Without
FS
0.59 0.74 0.56 0.63 0.57 0.68 0.59 0.74 0.72
With
FS
0.99 1.00 0.85 0.85 0.91 0.92 0.99 0.99 0.72
NG
Without
FS
0.81 0.83 0.32 0.33 0.46 0.48 0.92 0.92 0.70
With
FS
0.97 0.98 0.39 0.39 0.56 0.56 0.93 0.93 0.70
Table 4: Variational Autoencoder and DBSCAN Comparison.
Comp Desc
Recall Precision F1 Accuracy
VAE DBSCAN VAE DBSCAN VAE DBSCAN VAE DBSCAN Base
ME
Without
FS
0.35 0.39 0.65 0.45 0.46 0.42 0.35 0.40 0.71
With
FS
0.96 0.95 0.91 0.91 0.93 0.93 0.97 0.95 0.71
SEQ
Without
FS
0.59 0.55 0.55 0.51 0.57 0.53 0.58 0.54 0.72
With
FS
0.99 0.99 0.85 0.80 0.91 0.89 0.99 0.99 0.72
NG
Without
FS
0.81 0.62 0.32 0.04 0.46 0.08 0.91 0.92 0.70
With
FS
0.97 0.81 0.38 0.05 0.55 0.09 0.92 0.52 0.70
Table 5: One class learning of Variational Autoencoder and one class SVM Comparison.
Comp Desc
Recall Precision F1 Accuracy
VAE SVM VAE SVM VAE SVM VAE SVM Base
ME
Without
FS
0.77 0.32 0.42 0.23 0.54 0.27 0.77 0.33 0.72
With
FS
0.97 0.97 0.92 0.50 0.94 0.66 0.97 0.97 0.72
SEQ
Without
FS
0.74 0.72 0.63 0.36 0.68 0.48 0.74 0.71 0.72
With
FS
1.00 0.99 0.85 0.22 0.92 0.36 0.99 0.99 0.72
NG
Without
FS
0.83 0.99 0.33 0.24 0.48 0.39 0.92 0.92 0.70
With
FS
0.98 1.00 0.39 0.23 0.56 0.38 0.93 0.95 0.70
6.2.1 Result Analysis
Recall is the most important score in anomaly detec-
tion, since even a slight fault in an industrial software
system would result in massive losses. However, pre-
cision is also important as many false positives would
result in a huge wastage of resources in reacting to the
anomaly alerts.
Anomaly Detection in Industrial Software Systems - Using Variational Autoencoders
445

When comparing the scores from the experiments
performed using the multi-class VAE and DBSCAN,
the VAE outperforms, or is quite close to DBSCAN in
all the components of the industrial software system.
This shows that the VAE is better than or equal to
DBSCAN, which is an established technique.
When comparing the scores from the experiments
performed using the VAE one class learning, the VAE
has shown to give higher recall values than that of
the multi-class model. Moreover, one class learning
VAE outperformed the well known semi-supervised
anomaly detection technique, one class SVM with
a high margin. Hence one class learning of VAE
provides a suitable semi-supervised anomaly detec-
tion framework for industrial software system do-
main. However, VAE could not outperform the su-
pervised SVM classification based anomaly detection
technique executed in the previous research on the
same dataset (Ranaweera et al., 2017).
When comparing the impact of the feature selec-
tion technique on the scores of the VAE, we can ob-
serve that the performance of all techniques had im-
proved when feature selection was performed. Previ-
ous research that employed Autoencoders has not ex-
ploited any feature selection, since Autoencoders are
said to be usable in high dimensional problems (Saku-
rada and Yairi, 2014; Aygun and Yavuz, 2017). How-
ever, according to the results obtained from the fea-
ture selection, we show that feature selection can im-
prove the performance of VAE substantially. More-
over, the experiments support the claims that had been
made in previous research that DBSCAN does not
perform well in high dimensional datasets (Berkhin
et al., 2006).
However, when comparing the overall results of
the three components, Native Gateway has lower re-
sults than the other two components. When analyzing
the dataset, We found that compared to Sequencer and
Matching Engine, data points have a sparse distribu-
tion in density wise, which can cause recognition net-
work of the VAE to identify normal points as anoma-
lous due to the high reconstruction error.
7 CONCLUSION
This paper presented the use of a deep learning neu-
ral network known as Variational Autoencoder (VAE)
to detect anomalies in an industrial software system
containing components with a large number of fea-
tures. Since the anomaly detection framework was
designed for industrial software systems with criti-
cal executions, higher recall is expected. Accord-
ing to the experiments executed, higher recall values
were obtained and these results were shown to im-
prove extensively with the feature selection mecha-
nism adopted in the research. Moreover, performance
of VAE is shown to outperform DBSCAN, which
is a well-established clustering based technique for
anomaly detection. Furthermore, the semi-supervised
one class learning based VAE outperforms the one
class SVM, and consequently proves that it is better
suited for a production environment.
One of the main characteristics of the VAE is that
it can be improvised for high dimensional anomaly
detection problems. However, this paper emphasized
the importance of identifying discriminative features
before utilizing the VAE, which leads to improved
generative power and accuracy in detecting anoma-
lies.
As future work, we intend to experiment with
unsupervised feature selection techniques such as
Joint Embedding Learning and Sparse Regression
(JELSR), Robust Joint Graph Sparse Coding, and Ex-
emplar Convolutional Neural Networks, instead of the
currently used supervised feature selection technique
tree based ensemble. This way, multi-class VAE can
be successfully used as a fully unsupervised anomaly
detection technique in industrial software systems.
ACKNOWLEDGEMENTS
The authors thank MillenniumIT Software (Private)
Ltd. for providing the datasets for industrial system
evaluation.
REFERENCES
Agrawal, S. and Agrawal, J. (2015). Survey on anomaly de-
tection using data mining techniques. Procedia Com-
puter Science, 60:708–713.
Alonso, J., Belanche, L., and Avresky, D. R. (2011). Pre-
dicting software anomalies using machine learning
techniques. In Proceedings of the 10th IEEE Inter-
national Symposium on Network Computing and Ap-
plications, pages 163–170. IEEE.
Amer, M. and Abdennadher, S. (2011). Comparison of
unsupervised anomaly detection techniques. Ger-
man Research Center for Artificial Intelligence (DFKI
GmbH).
An, J. and Cho, S. (2015). Variational autoencoder based
anomaly detection using reconstruction probability.
SNU Data Mining Center.
Aygun, R. C. and Yavuz, A. G. (2017). Network anomaly
detection with stochastically improved autoencoder
based models. In 4th International Conference on Cy-
ber Security and Cloud Computing (CSCloud), pages
193–198. IEEE.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
446

Berkhin, P. et al. (2006). A survey of clustering data mining
techniques. Grouping multidimensional data, 25:71.
Dean, D. J., Nguyen, H., and Gu, X. (2012). Ubl: Unsu-
pervised behavior learning for predicting performance
anomalies in virtualized cloud systems. In Proceed-
ings of the 9th international conference on Autonomic
computing, pages 191–200. ACM.
Doersch, C. (2016). Tutorial on variational autoencoders.
arXiv preprint arXiv:1606.05908.
Erfani, S. M., Rajasegarar, S., Karunasekera, S., and Leckie,
C. (2016). High-dimensional and large-scale anomaly
detection using a linear one-class svm with deep learn-
ing. Pattern Recognition, 58:121–134.
Eskin, E., Arnold, A., Prerau, M., Portnoy, L., and Stolfo,
S. (2002). A geometric framework for unsupervised
anomaly detection: Detecting intrusions in unlabeled
data. Applications of data mining in computer secu-
rity, 6:77–102.
Guo, Z., Jiang, G., Chen, H., and Yoshihira, K. (2006).
Tracking probabilistic correlation of monitoring data
for fault detection in complex systems. In Depend-
able Systems and Networks, 2006. DSN 2006, pages
259–268. IEEE.
Heller, K. A., Svore, K. M., Keromytis, A. D., and Stolfo,
S. J. (2003). One class support vector machines for de-
tecting anomalous windows registry accesses. In Pro-
ceedings of the workshop on Data Mining for Com-
puter Security, volume 9.
Hu, W., Liao, Y., and Vemuri, V. R. (2003). Robust support
vector machines for anomaly detection in computer
security. In ICMLA, pages 168–174.
Id´e, T. and Kashima, H. (2004). Eigenspace-based anomaly
detection in computer systems. In Proceedings of
the 10th ACM SIGKDD international conference on
Knowledge discovery and data mining, pages 440–
449. ACM.
Kingma, D. P. and Welling, M. (2014). Auto-encoding vari-
ational bayes. Proceedings of the International Con-
ference on Learning Representations (ICLR).
Kotsiantis, S. and Pintelas, P. (2004). Recent advances in
clustering: A brief survey. WSEAS Transactions on
Information Science and Applications, 1(1):73–81.
Loh, W.-K. and Park, Y.-H. (2014). A survey on density-
based clustering algorithms. In Ubiquitous Informa-
tion Technologies and Applications, pages 775–780.
Springer.
Ranaweera, L., Vithanage, R., Dissanayake, A., Prabodha,
C., and Ranathunga, S. (2017). Anomaly detection
in complex trading systems. In Engineering Research
Conference (MERCon), 2017 Moratuwa, pages 437–
442. IEEE.
Sakurada, M. and Yairi, T. (2014). Anomaly detection
using autoencoders with nonlinear dimensionality re-
duction. In Proceedings of the 2nd Workshop on Ma-
chine Learning for Sensory Data Analysis (MLSDA),
page 4. ACM.
Schneider, C., Barker, A., and Dobson, S. (2015). Au-
tonomous fault detection in self-healing systems using
restricted boltzmann machines.
Shekhawat, M. and Sharma, I. (2017). Density based met-
rics for clustering–a comprehensive survey. Interna-
tional Journal for Women Researchers in Engineering,
Science and Management, 1:6–9.
Tan, Y., Nguyen, H., Shen, Z., Gu, X., Venkatramani, C.,
and Rajan, D. (2012). Prepare: Predictive perfor-
mance anomaly prevention for virtualized cloud sys-
tems. In IEEE 32nd International Conference on
Distributed Computing Systems (ICDCS), pages 285–
294. IEEE.
Walker, J., Doersch, C., Gupta, A., and Hebert, M. (2016).
An uncertain future: Forecasting from static images
using variational autoencoders. In European Confer-
ence on Computer Vision, pages 835–851. Springer.
Wang, Y., Wong, J., and Miner, A. (2004). Anomaly intru-
sion detection using one class svm. In Fifth Annual
IEEE Information Assurance Workshop, pages 358–
364. IEEE.
Willsky, A. S. (1976). A survey of design methods for
failure detection in dynamic systems. Automatica,
12(6):601–611.
Xu, D., Yan, Y., Ricci, E., and Sebe, N. (2017). Detecting
anomalous events in videos by learning deep represen-
tations of appearance and motion. Computer Vision
and Image Understanding, 156:117–127.
Yang, Y., Lian, B., Li, L., Chen, C., and Li, P. (2014).
Dbscan clustering algorithm applied to identify sus-
picious financial transactions. In International Con-
ference on Cyber-Enabled Distributed Computing and
Knowledge Discovery (CyberC), pages 60–65. IEEE.
Anomaly Detection in Industrial Software Systems - Using Variational Autoencoders
447
