
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems:
Results from a Systematic Literature Review
Davide Calvaresi
1,2
, Kevin Appoggetti
3
, Luca Lustrissimini
3
, Mauro Marinoni
1
,
Paolo Sernani
3
, Aldo F. Dragoni
3
and Michael Schumacher
2
1
Scuola Superiore Sant’Anna, Pisa, Italy
2
University of Applied Sciences Western Switzerland, Sierre, Switzerland
3
Universit
`
a Politecnica delle Marche, Ancona, Italy
Keywords:
Software Engineering, Negotiation, Multi-Agent Systems, Cyber-Physical Systems, Real-Time Systems.
Abstract:
Cyber Physical Systems (CPS) require a multitude of components interacting among themselves and with the
users to perform automatic actions, usually under unpredictable or uncertain conditions. Multi-Agent Systems
(MAS) have emerged over the years as one of the major technological paradigms regulating interactions and
negotiations among autonomous entities running under heterogeneous conditions. As such, MAS have the
potential to support CPS in implementing a highly reconfigurable distributed thinking. However, some gaps
are still present between MAS’ features and the strict requirements of CPS. The most relevant is the lack of
reliability, which is mainly due to specific features characterizing negotiation protocols. This paper presents
a systematic literature review of MAS negotiation protocols aiming at providing a comprehensive overview
of their strengths and limitations, examining both the assumptions and requirements set during their develop-
ment. While this work confirms the potential of MAS in regulating the interactions among CPS components,
the findings also highlight the absence of real-time compliance in current negotiation protocols. Strongly
characterizing CPS, the capability to face strict time constraints could bridge the gap between MAS and CPS.
1 INTRODUCTION
Cyber-Physical Systems (CPS) are deeply rooted
in our daily living. Interconnected electronic de-
vices of any size (from wearable to huge drivers)
compose heterogeneous systems operating in var-
ious domains (e.g., manufacturing (Hsieh, 2002),
zero-energy buildings, near-zero automotive fatali-
ties (Rajkumar et al., 2010), telerehabilitation (Cal-
varesi et al., 2017b), and e-health (Calvaresi et al.,
2014)). Scalable across time and space, with the abil-
ity to cope with a scenario’s uncertainty, privacy con-
cerns and security issues, CPS and MAS are trans-
forming the humans’ control of the physical world.
Usually, these systems employ sensors to collect data
from the real world, process them, and then provide
feedback, either to other entities, or directly affect-
ing (e.g., via actuators) the real world. Such systems
are capable and responsible for both performing hard-
coded and automatic actions and dealing with unpre-
dictable or uncertain situations requiring “intelligent”
actions. The distributed nature of such systems opens
the horizon to a multitude of possible synergies. In-
teractions among entities of same or different systems
represent a fascinating world, which has been largely
investigated by the scientific community. However,
new arising challenges have still to be faced.
On the one hand, according to Calvaresi et al (Cal-
varesi et al., 2017a), Multi-Agent Systems (MAS)
is one of the most prominent and promising “ap-
proaches” supporting Internet of Things (IoT) tech-
nologies and CPS. The adoption of a multi-agent
framework can facilitate the implementation of coop-
erative/competitive distributed thinking, robustness,
reconfigurability, reusability (e.g., components ca-
pabilities, functionalities, knowledge), and a par-
tial technology independence (smoother migration
among different technologies) (Bellifemine et al.,
2007; Calvaresi et al., 2016b). On the other hand,
CPS require strict dependably, stringent safety and
security policies, resources efficiency, and real-time
guarantees (Rajkumar et al., 2010). For example, a
safe use of personal devices (e.g., wearable blood-
sugar/pressure devices), reliable and timely informa-
tion delivery, bounded risks in receiving wrong infor-
mation (in terms of content and timing), privacy guar-
224
Calvaresi, D., Appoggetti, K., Lustrissimi, L., Marinoni, M., Sernani, P., Dragoni, A. and Schumacher, M.
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review.
DOI: 10.5220/0006594802240235
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 1, pages 224-235
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

antees and systems overall stable are features strictly
required in safety-critical CPS.
Although the advantages provided by the adoption
of MAS are remarkable, the full compliance with the
requirements of CPS is not met yet (Calvaresi et al.,
2017a). Uncertainty in the environment, security
attacks, limitations in cyber models, and errors in
physical devices make ensuring the overall system
robustness, security, and safety, a critical challenge.
The distributed decision-making process is crucial
in the above-mentioned systems, and the negotiation
process is essential for their success.
Contribution
To reach consensus or just interact, MAS need sev-
eral negotiation protocols (standard and not). To bet-
ter understand such contributions, this work performs
a Systematic Literature Review (SLR) of the most rel-
evant negotiation protocols proposed in the scientific
literature addressing the following features:
(i) assumptions have been detailed to define the char-
acteristics of environments and systems in which
the negotiation processes are operating;
(ii) requirements have been presented and related to
the assumptions to define which objectives and
constraints have been set;
(iii) Strengths, and limitations collected by the pri-
mary studies have been elaborated to highlight
achievements and still open challenges.
Elaborating and summarizing the evidence, the
criteria presented in Section 3 have been generated
and discussed. Finally, considering the reliability as
the main requirement of safety-critical CPS, the nego-
tiation’s characteristics, constraints, and bounds have
been formalized. The paper is organized as follows:
Section 2 presents the review process and data collec-
tion, Section 3 organizes and describes the obtained
results, Section 4 briefly discusses the obtained results
in key CPS. Finally, Section 5 concludes the paper.
2 DATA COLLECTION AND
REVIEW PROCESS: THE
METHODOLOGY
Retrieving, selecting, and analyzing existing litera-
ture has more relevance if performed systematically.
Hence, this paper adheres the procedure suggested
by (Kitchenham et al., 2009) and adapted by (Cal-
varesi et al., 2016a). Such a methodology is com-
posed of three stages (see Figure 1), and it is rigorous
and reproducible
1
.
Firstly, Planning the review defines steps and
constraints. Such a phase elaborates a generic
free-form question in structured research questions
(SRQs) which characterize the pillars of the whole
protocol. By doing so, the outcome will be repro-
ducible, reliable, and comparable. The second stage,
Performing the review, deals with the execution of
the planned activities: (i) papers’ collection and se-
lection, (ii) paper elaboration, and (iii) features ex-
traction. The last step, Document Review, deals with
the data analysis and reporting activities related to the
scientific dissemination.
2.1 Planning the Review
Defining the review process sets the research ques-
tions and their contexts, search strategy, review
protocol, and biases and disagreement resolution.
Research Questions Definition
Investigating the scenarios presented in Section 1, the
following free-form questions arose: (i) What needs,
characterize the negotiations among agents in the sev-
eral application scenarios? (ii) Are the solutions pro-
posed by the scientific community satisfactory? (iii)
How are such solutions characterized?
The Goal-Question-Metric (GQM), proposed by
Kitchenham et al. (Kitchenham et al., 2010) and Gal-
ster et al. (Galster et al., 2014), ruled the decompo-
sition of the unstructured questions mentioned above,
into a set of three structured research questions. In
particular, the assumptions, requirements, strengths,
and limitations led the investigation and the definition
of the following questions:
SRQ1 Setting the next question we aim at understand-
ing the Step 0 of the negotiation protocol develop-
ment: What are the assumptions rooting the most
relevant approaches?
SRQ2 To identify the goals targeted by such protocol,
the following question is set: What are the re-
quirements such approaches intend to meet?
SRQ3 The adoption of a specific negotiation algorithm
would possibly bring some advantages. To name
them, the following question is set: What are the
strengths and limitations characterizing the re-
lated negotiation approaches?
Develop the Review Protocol
Once completed the definition of the structured-
research-questions, the definition of the Search Strat-
egy follows. Gray literature may introduce possible
1
Primary studies selected and elaborated in early 2017
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review
225
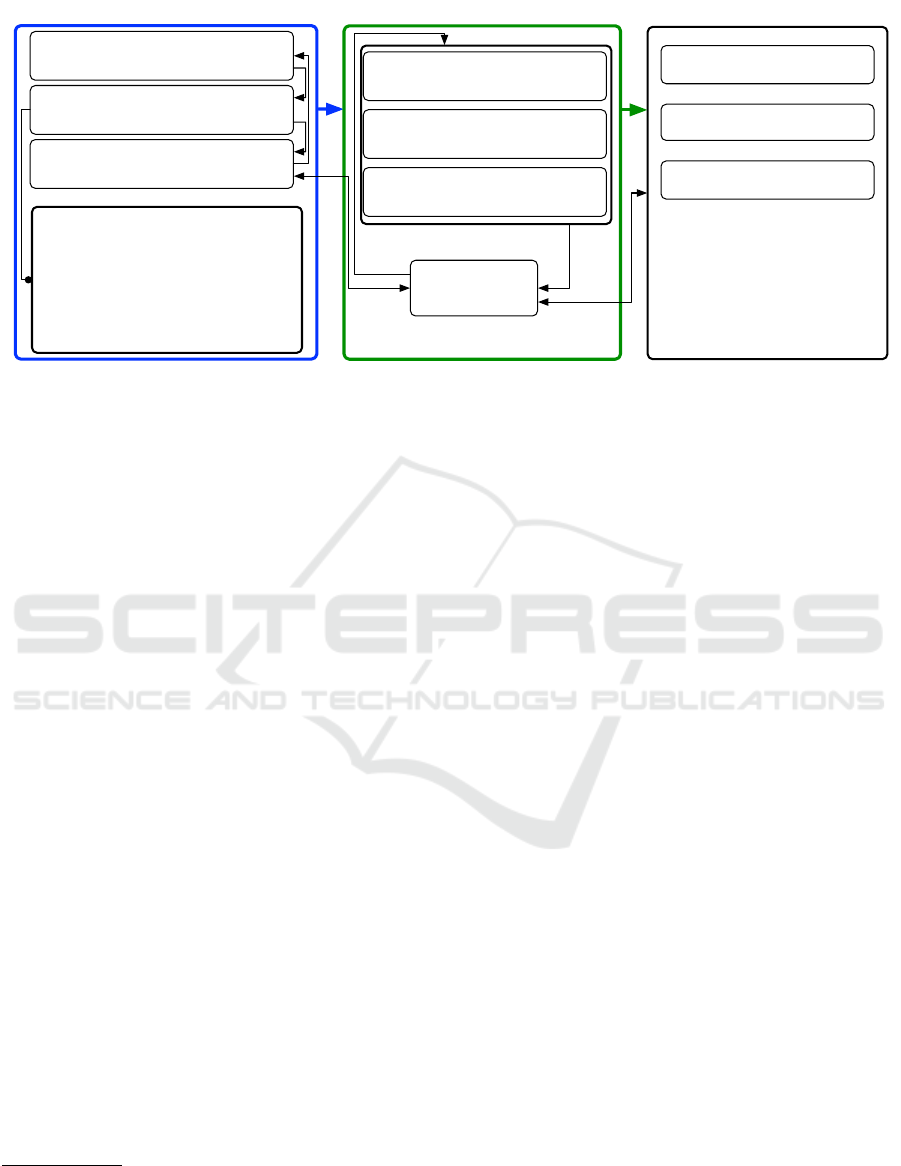
Planning the Review (a)
Dissemination (c)
Define the research questions
[free form and structured question]
Develop the review protocol
[Search strategy definition]
Validate the review protocol
Data Analysis
Final report composition
Summarizing evidence
• Channel of research
• Acceptance criteria
• Set of keywords
• Inclusion criteria
• Stop collecting criteria
• Features and quality criteria
• Bias and disagreement resolution
• Expected output format
Performing Review (b)
Disagreement
resolution
Article Elaboration
[Features collection, DARE criteria]
Article Selection
[Inclusion criteria application]
Article Collection
[Systematic search execution]
Figure 1: Review Methodology Structure according to (Kitchenham et al., 2009) and (Calvaresi et al., 2016a).
biases. Thus, only peer-reviewed collectors of papers
(ieeeXplore
2
, Sciencedirect
3
, ACM Digital Library
4
,
and Citeseerx
5
) have been investigated.
To obtain more accurate results during the
semi-automatic research, some keywords have been
contextualized (by aggregating at least two or three
words). According to the reviewers’ rooted back-
grounds and knowledge related to the Multi-Agent
domain, the following set of keywords has been
defined: multi-agent interaction protocol, multi-
agent negotiation protocol, agent-based negotiation,
multi-agent problem-solving negotiation, distributed
problem-solving negotiation, control distributed
problem-solving. For each query, the papers crawlers
produced lists of articles ordered by pertinence. The
criteria used to stop the paper collection is the same
adopted by Calvaresi et al. in (Calvaresi et al., 2016a).
Inclusion Criteria Definition
The initial research counted 200 papers. A further
coarse-grained examination reduced them to 143. The
reviewers filtered them by performing a simultaneous
and autonomous check of titles and abstracts’ perti-
nence with the following inclusion criteria:
A) Context: The primary studies should define their
contributions in the context of distributed-like
systems;
B) Purpose: The purpose of primary studies should
refer to mechanisms for negotiating tasks and re-
sources or for achieving agreement or consensus
between distributed entities.
2
http://ieeexplore.ieee.org/Xplore/home.jsp
3
http://www.sciencedirect.com/
4
http://dl.acm.org/
5
http://citeseerx.ist.psu.edu/index
C) Relevance: The primary studies should provide
at least one of the following elements: [theoreti-
cal model, interaction mechanisms, practical im-
plementation, tests, critical analysis, critical eval-
uations or discussion]
In the case of a clear verdict was missing (e.g.,
R1(Yes), R2(No), R3(Maybe)) the disagreement
resolution process described below has been applied.
Features and Quality Criteria Definition
During the “Features Collection”, assessing the qual-
ity of the information provided by the primary studies
is one of the main challenges of a Systematic Litera-
ture Review (Calvaresi et al., 2016a).
Although this work deals with a well-defined set
of feature, context, rationale, research justification,
critical examination, statement of findings and
possible biases can hamper the credibility. Thus, the
retrieved features have been classified by associating
them Y - information is explicitly defined / evaluated,
P - information is implicit / stated, or N - information
is not inferable (DARE critirea (Kitchenham et al.,
2009)).
Biases and Disagreement Resolution
The following expedients have been adopted to min-
imize and solve possible biases and conflicts. Devel-
oping the method and elaborating the articles, most
of the tasks have been cross-checked. In particular,
concerning Figure 1:
• the reviewers conducted the tasks included in 1(a)
and (b) “Planning the Review”, and “Document
Review” collaborating synchronously.
• The collected articles list has been divided into
three (number of reviewers performing the “Ar-
ticle selection”) subsets, which have been pro-
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
226

cessed (applying the inclusion criteria check) by
at least two out of three reviewers. The single re-
viewer’s choices (Yes, No, or Maybe) have been
kept hidden from each other till all of them had
completed such a task. In the case of possible un-
certainties (e.g., Yes-No, Yes-Maybe, No-Maybe)
a third reviewer has been asked an extra check to
finally decide weather include the article in the fi-
nal list (to be elaborated) or not.
• During the “Article Elaboration”, in the case rel-
evant doubts arose, periodical collaborative dis-
agreement resolution meetings have been orga-
nized.
3 RESULTS PRESENTATION
This section discusses the outcomes obtained by per-
forming the methodology presented in Section 2. The
main investigated issues are the assumptions on which
the studied protocols rely on, the subsequent require-
ments set by the authors of the primary studies to
identify and profile the proposed algorithms, and fi-
nally, the elaborated strengths and limitations, to sum-
mon the state of the art and identify future challenges.
3.1 Assumptions
The assumptions have been clustered to elicit abstract
categories thus facilitating presentation and under-
standing (see Table 1). Most of the systems com-
posed by distributed entities are based on the inter-
actions among the available components. In MASs,
such interactions have always been assumed asyn-
chronous (Smith, 1980; Smith and Davis, 1981)
strengthening the autonomy of single agents (e.g.,
their ability to execute without a direct human inter-
vention and with full control over their own thread).
Despite the communication-delay can be a crucial
component, some studies neglect it, referring to the
hypothesis of instantaneous message delivery (Ak-
nine, 1998). In most cases, the authors refer to
a general multi-agent architecture, even if few of
the analyzed papers base their agents on the BDI
paradigm (Atkinson et al., 2005). The design of a
negotiation protocol mainly relies on the capability of
taking autonomous decisions to pursue beliefs or di-
rectly self-interested or common goals. Indeed, the
rationality (e.g., the ability of agents to always exe-
cute to achieve their goals, and never to prevent them
from being achieved) and autonomy of agents are the
most common assumptions in the analyzed studies.
For example, in a group choice design support system
(GCDSS), the agents negotiate on behalf of their user
trying to persuade other agents according to their im-
posed or independently developed knowledge (Rus-
sell et al., 1995; Ito and Shintani, 1997).
Often, such autonomy has to face the impossi-
bility of having agents ready with complete knowl-
edge. Although dealing with partial knowledge might
lead to possible deception, it is the most studied sce-
nario in both cooperative and competitive MAS (Ak-
nine et al., 2004; Zlotkin and Rosenschein, 1991;
Smith and Davis, 1981). Having a competitive rather
than cooperative agents’ community, frames com-
pletely different scenarios and conditions which are
even more complex in the case they are both cooper-
ative and competitive at the same time. Some prac-
tical examples of negotiating limited knowledge in
cooperative scenarios are the control of UAVs’ task
scheduling (Budaev et al., 2016), monitoring elec-
tricity transformation networks, and scheduling meet-
ings (Kraus, 1997). Agents can collaborate by fol-
lowing self-organizing policies or relying on an or-
chestrator/coordinator (Wang et al., 2014) (the spec-
ular role in competitive scenarios is named “moder-
ator” (Hanachi and Sibertin-Blanc, 2004)). Agents
have to be “certified” or “trusted” (Alberti et al.,
2004). Thus, the collaboration is more secure and can
be applied in crucial activities such as decision mak-
ing, coordination, and control processes. The bid-
based negotiation approach is the most diffused, de-
spite the involvement of simple or complex tasks (Ak-
nine et al., 2004). In this approach, each agent
can play two main roles: (i) the initiator (who calls
for bids) and (ii) the contractor (who bids) in 1-to-
1, 1-to-many scenarios, or auction based many-to-
many (Wang et al., 2014). It can be predicted to
last for short (Faratin et al., 1998) or long (Collins
and Wolfgang Ketter, 2002) periods of time. In the
scenario where the negotiation is still not converg-
ing, it might be considered as failed (Aknine et al.,
2004). During a single instance of the bid-based
protocols, an agent can play one of the two roles.
Nevertheless, during the system execution, several
negotiations of several tasks or resources can hap-
pen, and then, agents can play both (i) and (ii) (as-
suming a community of agents playing exclusively
either (i) or (ii) is a rare scenario). In collabora-
tive scenarios, due to their inner mechanisms, par-
ticular negotiation protocols need to prevent agents
from over-bidding (e.g., very high rates in the Pre-
Bidding phase). The solutions have been “bound-
ing” the cooperation with the introduction of self-
interested agents (Aknine et al., 2004), imposing “se-
quentiality” (Hanachi and Sibertin-Blanc, 2004), or
limiting the number of issues to be possibly negoti-
ated (Faratin et al., 1998).
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review
227

Table 1: Assumptions overview.
Assumption Class Assumption Class Assumption Class
No-commitment AU Agents multi-role AR Stationary/mobile agents AR
Customizable neg. FL Customizable interaction prot. FL No comm-delay AR
Mobile agents AR Autonomous agents AU agent as service provider AR
Cooperative agents CP Neighborhood limited comm. IN Instantaneous messaging IN
Partial knowledge RA Cooperative decision making CP Multi-crit. decision making RA
Cooperative control CP BDI agents AR No bids on conflicting plans RB
Cooperative computation CP Certified agents RL One bid per agent per time FL
Multilateral comm. IN Limited resources RA Low-level comm. protocol IN
Shared resources AR Delegation FL No explicit utility transfer RA
Concurrent agents CM Castable (constraints/agents) FL Guaranteed resource alloc. RL
Sequential neg. RB Feedback mechanism RL Information Completeness AR
Roles re-definable
FL Bounded behaviors RA Competitive agents CM
Coordinated agents AR Stationary agents AR Self-interested agents CM
1-to1 negotiation IN Static environment AR Indivisible resources AR
1-to-n negotiation IN Tasks fully preemptable RB Loosely-coupled agents AR
Time efficiency PR Fault-tolerance RB Asynchronous agents AR
Failing negotiations RB simple tasks AR Sub-optimality PR
Neg. topic related AR Ontology IN Timed negotiation N
Long-time negotiation FL Agents’ specific role AR Limited services/issues FL
Indirect interactions IN Short-time negotiation FL Multi-negotiation FL
Allowed counter-offers FL No preemption AR Independent tasks AR
Penalized de-committing RB Extendable agents FL Rational Agents AR
Uncertainty RB
Legend
AR Architectural FL Flexibility RA Rationality CM Competition RB Robustness
AU Autonomy CP Cooperation IN Interaction PR Performance RL Reliability
The “pool” of agents able to take part in a nego-
tiation might be subject to some constraints. For ex-
ample, it can be restricted by the concept of neighbor-
hood (Olfati-Saber et al., 2007; Budaev et al., 2016)
which can have completely different outcomes if con-
sidering stationary agents (e.g., agents which execute
always in the same node of a network), mobile agents
(e.g., agents able to migrate to different nodes at run-
time), or hybrid scenarios (Ferber and Gutknecht,
1998; Wang et al., 2014). In (Aknine et al., 2004),
the agent selection for a task execution is based on
several factors such as the position of the agent in its
environment and its capacity to process information.
Reza et al. (Olfati-Saber et al., 2007) give cru-
cial importance to the agents’ autonomy, especially
in the presence of possible link/node failures unex-
pected time-delay and possible changes in the net-
work topology. The assumption of having a system
capable of operating as expected even in the case one
or more failures happen is quite strong. However, sev-
eral studies such as (Aknine et al., 2004) adopted it,
facing scenarios where faults are most likely to hap-
pen. Several studies made assumption enforcing the
flexibility, but hampering (in some cases impeding)
the reliability. For example, the possibility of break-
ing a commitment (the promise made for a task exe-
cution in the bidding phase), with (Wu, 2008; Zhou
et al., 2004) or without penalty, is not remotely al-
lowed (Odell et al., 2001; Odell et al., 2000). Assum-
ing the possibility of delegating tasks to other agents,
it would boost flexibility and efficiency but limit re-
liability and rationality. The possibility of preempt-
ing tasks/behaviors is reasonable. However, assum-
ing complete preemptability coupled with the absence
of explicit deadlines, and allowing the possibility of
failing negotiations, identical outcomes might be gen-
erated: multiple deadlines missing or direct starva-
tion (Krothapalli and Deshmukh, 1999; Aknine et al.,
2004). Sharing resources is a common practice to en-
hance system flexibility, bounded by their availabil-
ity (Wellman and Wurman, 1998). Several protocols
consider the customization of the negotiation interac-
tions (Mazouzi et al., 2002) possible by also provid-
ing a pre-set personalization mechanism (Demazeau,
1995; Purvis et al., 2003). The agents’ roles might be
assumed static or dynamic (Wang et al., 2014; Faratin
et al., 1998).
3.2 Requirements
Once the most common and relevant assumptions
have been framed, the next step is to investigate the
prevailing requirements set for negotiation protocols
in MAS (see Table 2). The agents’ interaction leading
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
228

to the achievement of consensus and self/community
goals captured the most concerns. Many contribu-
tions provide only negotiation-baselines, and thus re-
quire the implementation of generic/ad-hoc heuris-
tics (Wanyama and Far, 2007). According to Mazouzi
et al. (Mazouzi et al., 2002), being able to identify
how and when to validate protocols, evaluate their
success, and explain the relationships between agents,
are outstanding requirements that must be considered.
Nonetheless, deciding whom to interact with (e.g.,
agents with a higher reputation should have better
bearing than others) and when initiating the interac-
tion in certain scenarios is also crucial (Ramchurn
et al., 2004).
On one hand, having an organized structure (Fer-
ber and Gutknecht, 1998) and a flexible and auto-
mated agent community (Kraus, 1997) capable of
achieving desired goals without affecting somebody
else autonomy (Marzougui and Barkaoui, 2013) are
the most common elements characterizing the envi-
ronments in which the negotiation protocols have to
operate in. On the other hand, having feasible, bal-
anced, converging and preserved individual rational-
ity and privacy are the most common elements that
the protocols should present (Wellman and Wurman,
1998). For example, feasibility (basic assumption or
requirement associating all the approaches) involves
the need for setting functionalities such as check-and-
validation of task assignment (Hsieh, 2002). Some
approaches resulted in being extremely tailored on
certain use-cases. Thus, they set very precise re-
quirements to address a relatively broad multitude of
goals. For example, the impossibility for the con-
tractor to quit a task after having started it (Aknine
et al., 2004), the non-retractability of bids, and the
non-returnability of products (Guttman and Maes,
1998) are requirements set to foster reliability, espe-
cially in time-dependent solutions (Collins and Wolf-
gang Ketter, 2002). Moreover, although insufficient
to fully provide real-time guarantees, some solutions
seek for the respect of deadlines and schedulability
guarantees (Shen and Norrie, 1998).
To enhance stability, some authors set the
compliance with precedence and temporal con-
straints (Wanyama and Far, 2007). The time depen-
dency has also been interpreted as the agents’ capa-
bility of conceding more rapidly if the deadline ap-
proaches (Faratin et al., 1998). Regarding resources,
they are assumed limited. Thus, setting a require-
ment regulating resources access and consumption
regarding the agent community and their environ-
ment is mandatory. In trusted and collaborative en-
vironments, setting some policies is required to pro-
tect agents from exploiting each other (Faratin et al.,
1998) and to discourage counter-speculations (Collins
et al., 1998b). Other approaches to avoid security
issues propose the requirement to specifically de-
fine payment and permission mechanisms (Collins
et al., 1998b), transactions and market architec-
tures (Collins et al., 1998a), mandatory penalty poli-
cies (e.g., non-penalization for new entrance and
changing agents’ identity (Ramchurn et al., 2004)),
agent reputation update rate, and formal specification
for processes validation (Mazouzi et al., 2002).
Regarding robustness, systems are required to ei-
ther avoid failures or to keep working if they do oc-
cur below a certain threshold. One solution pro-
posed in the primary studies is to supply informa-
tion about the contractor during task execution (Ouel-
hadj et al., 2005). In particular, Collins et al. (Collins
et al., 1998b) and Hsieh et al. (Hsieh, 2002) propose
the requirement of a robust exception handler and a
method to solve resource conflicts. Architectural re-
quirements have been another important and recurrent
element in the primary studies. For example, to over-
come orchestration and autonomy limitations, a mod-
erator could be compulsory (supporting community’s
fairness) (Hanachi and Sibertin-Blanc, 2004). Finally,
to enhance or attain a certain performance, scenario-
driven converging time and maximum execution time
per task set are required (Vulkan and Jennings, 2000).
Despite the lack of critical analysis found in
many scientific contributions (Calvaresi et al., 2016a),
the analyzed papers have often proposed interesting
clues. The more practical the proposed solutions are,
the more detailed is the analysis of strengths and lim-
itations. The mainly theoretical contributions pre-
sented a broad range of claims from the more ex-
plicit and easily understandable to the more ambi-
tious and ambiguous. By looking at the big pic-
ture, common traits also associate entirely different
approaches. Moreover, clustering strength allowed to
define a sort of hierarchical relevance of the arisen
categories. Due to space restrictions, the above-
mentioned process will not be addressed in this paper.
Nevertheless, such categories can be easily under-
stood, since they reflect the structures of Section 3.3
and Section 3.4
3.3 Strengths
Table 3 collects all the features identified as
“strengths” by the primary studies. Although feasi-
bility is at the base of every process/protocol, it is not
always guaranteed, and thus many studies consider it
a “strength”. Hence, it is not trivial having a con-
verging negotiation protocol (Hanachi and Sibertin-
Blanc, 2004; Matt et al., 2006) and guaranteeing that
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review
229

Table 2: Requirements Overview.
Requirement Class Requirement Class Requirement Class
Specifics formalization VL Protocols validation VL Planned maintenance AR
Protocol evaluation VL Relating agents RA Tradeoff community/autonomy AU
Agents goal isolation RL Entity-change discouraged RL (who/when)-heuristics for neg IN
Promotion community join FL Agents’ reputation balancing FL Interactions reputation-based RL
Organized structures AR Automated agent AU Fake transactions penalization RL
Privacy preservation RL Individual rationality RA Increasing GDSSs intelligence PR
Efficiency PR Policies feasibility RL Services/gods non-returnability AR
Increase of compatibility FL Convergence & equilibrium PR Reasonable Converging Time PR
Ontology-based neg. IN Presence of moderators AR Manager operating in parallel IN
Context-based interactions IN time-limited neg. IN Heterogeneous transactions IN
Online tasks introduction FL Enanching inter-connections AR Complete agents’ knowledge RA
Interconnected managers
AR Limited managers visibility RA Reasonable Execution Time AR
Auction strictly-ruled RL Bids non-retractability AR Unbreakable commitment RL
global goals AR Precedence constraints AR Time-dependent neg. IN
Fault-tolerant neg. RL Resource-dependent neg. IN No-unbalanced exploitation RL
Complex neg. contracts AR Anti-frauds control RL Energy-balancing heuristics PR
Global social goals IN NO counter-speculations RL Secure resource supply RL
Optimal neg. PR Payment mechanisms IN Enable rich-semantic language IN
Enabled alliances IN Robust exception handling RL Multiple/Parallel neg. FL
Scalability AR retro-compatibility IN Common time reference AR
Competitiveness CM Shared knowledge AR Estimating due dates FL
Shared policies AR Costs estimable FL Multiple providers per service AR
Competitive negotiation CM Free community In/Out FL Heuristic-based bids FL
Cooperative framework CP Optimized coordination PR High-level comm. lagns IN
Norms taxonomy VL trust mechanism RL Mass customization PR
Holonic dynamics AR Conflict resolution proc. RL Breakable contracts RL
Deadlines respect RL Overview methods RL Comm-traffic reduction PR
Legend
AR Architectural FL Flexibility RA Rationality CM Competition VL Validation
CP Cooperation IN Interaction PR Performance RL Reliability AU Autonomy
a deal can always be achieved (Faratin et al., 1998).
Vice-versa, in the case of failures, detection and ex-
planation of success/failure are possible (El Fallah-
Seghrouchni et al., 1999). A possible way to avoid
failures due to computational intractability is to nego-
tiate throughout a centralized scheduling unit (Kan-
chanasevee et al., 1999). Seeking for effectiveness
and efficiency, many analyzed solutions are extremely
specialized and employable only in specific situa-
tions (Sun and Wu, 2009; Wu, 2008). Nevertheless, it
is possible to mention cases that allow language inde-
pendence (El Fallah-Seghrouchni et al., 1999), con-
text independence (Cardoso and Bordini, 2016) and
protocol re-utilization (Mazouzi et al., 2002), even
in diametrically opposed scenarios (e.g., cooperative
and competitive) (Sandholm, 1993). Some protocols
can deal with uncertain environments, avoiding un-
expected behaviors (Ito et al., 2008) and providing a
high level of formalization (Kraus, 1997) (relatively
flexible (Alberti et al., 2004)).
Moreover, having a controllable protocol size and
a tractable complexity (Mazouzi et al., 2002) helps
to enhance the system’s stability (Olfati-Saber et al.,
2007). Supporting agent autonomy (Hanachi and
Sibertin-Blanc, 2004), one has to cope with a broad
set of constraints. For example, they are radically
different if the scenarios considered are firmly struc-
tured and automated (Wang et al., 2014) (hierarchical
MAS (Wellman and Wurman, 1998)) or less struc-
tured, but considerably dynamic (e.g., the system just
requires to observe juridical, common-sense, and be-
havioral laws (Wu, 2008), or admits rule re-definition
on the fly (Purvis et al., 2003)). Finding an opti-
mal trade-off between completeness (the capability of
finding the optimal solution) (Ito et al., 2008) and the
computational cost is always needed.
MAS are considered distributed by nature, thus
guaranteeing low computational costs (Olfati-Saber
et al., 2007; Collins and Wolfgang Ketter, 2002;
Hong-tao and Kang, 2016; Golfarelli et al., 1997)
is broadly recognized as a major strength. Concern-
ing agent interactions, the overall performance of the
community can be enhanced by shortening global
negotiation processes (Aknine et al., 2004), avoid-
ing infinite plan expansion for recursive plans (Car-
doso and Bordini, 2016), generally reducing traf-
fic (Smith, 1980), avoiding the broadcast of request
messages to all the agents (Shen and Norrie, 1998),
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
230

Table 3: Strengths overview.
Strength Class Strength Class
Deal always possible RL Convergence of conversation RL
Success/failure detection VL NO computational intractability RL
Improved efficiency/effectiveness PR Communication lang/tech-independent AR
Allocations context-independent FL Protocol reuse FL
Cooperative/competitive compliant AR Dealing with uncertain environments FL
High-level of formalization AR Flexible specification FL
Controllable protocol size FL Tractable complexity PR
Stability
RL Ensure autonomy AU
Allows automated negotiation AR Hierarchical agents AR
Juridical/common-sense compliance RL Rules changing on the fly FL
Low computational costs PR Success/failure explanation RA
Shorter global negotiation processes PR No diverging/recursive plans RL
Net traffic reduced PR Avoidance of broadcasting requests PR
Reduced negotiation rounds PR Dynamic task allocation AR
Fast reaction to unpredictability PR Contract compliance verifiable RL
Preventable neg. with blocked agents RB Tasks-sets atomically negotiable AR
Better resource utilization PR Services description not required RA
Multiple heuristics employable AU Possibile parallel negotiations PR
De-commitment reduction PR Complex interactions observable RA
Qualitative/quantitative analysis VL Conflict Resolution in Natural Language IN
Trusted neg. sessions RL Increased task execution probability PR
Legend
AR Architectural FL Flexibility RA Rationality CM Competition VL Validation
RB Robustness IN Interaction PR Performance RL Reliability AU Autonomy
and reducing rounds (Wanyama and Far, 2007) and
messages-per-negotiation (Garcia et al., 2017). En-
abling dynamic task allocation (Ouelhadj et al., 2005)
is crucial. Thus, increasing the probability of task
execution (Budaev et al., 2016) is highly appreci-
ated. In terms of performance, the capacity of check-
ing contract compliance (Vok
ˇ
r
´
ınek et al., 2007), and
preventing negotiations with blocked agents (Aknine
et al., 2004), can limit unpredictability (further re-
duced in (Budaev et al., 2016) by decreasing the re-
action time to unpredictable events). Moreover, other
relevant studies mentioned the capability of: negoti-
ating sets of tasks considering them as atomic bar-
gaining items (Sandholm, 1993), improving the re-
source utilization (Xueguang and Haigang, 2004), re-
laxing some constraints in “trusted” negotiation ses-
sions (e.g., no need for services description) (Collins
et al., 1998b), implementing different heuristics (Car-
doso and Bordini, 2016), reducing the decommitment
ratio, and paralleling the negotiation processes (Ak-
nine et al., 2004).
Finally, some approaches permit to be evaluated
by executing formal studies (El Fallah-Seghrouchni
et al., 1999) such as qualitative and quantitative anal-
ysis (Mazouzi et al., 2002), and conflict resolution in
natural Language (Demazeau, 1995).
3.4 Limitations
Gathering and analyzing the limitations have been the
most challenging step of the whole review process.
They emerge in three main ways: related to the pro-
posed solution (often implicit and hidden between the
lines), to other approaches presented in the state of
the art, or to specific solutions used as comparison
terms.
The data elaboration, performed to avoid dupli-
cated elements and to simplify their understanding,
added a considerable overhead in the elaboration pro-
cess. Although several primary studies share the same
limitations, more than a hundred different instances
can be enumerated. The output of such aggregation is
summarized in Table 4.
Sorted by relevance, only the most relevant per
class are presented. The main limitation that affects
some elaborated protocol is the possibility of ending
up in a deadlock (Mazouzi et al., 2002; Aknine et al.,
2004; Golfarelli et al., 1997) which can entail catas-
trophic consequences. In the case of short bidding
windows, both initiators and contractors may lose op-
portunities. In the opposite scenario, with long bid-
ding windows, the whole system might be congested,
thus collecting a cascade of failures. Particularly for
those protocols only suitable for single issue nego-
tiation (Chang and Woo, 1994) or unable to handle
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review
231

Table 4: Limitations Overview.
Limitation Class Limitation Class
Risk deadlock RL Limited to single-issue neg. PR
Limited to sequential neg. PR Risk of not reaching stability RL
Single Point Of Failure RL Limited Knowledge access IN
Impossibility of any-time tactics PR Statistic constraints and system’s features PR
High net-traffic PR Not scalable FL
Additional Overhead neglected PR High computational cost PR
Strictly domain-dependent FL Competitive scenarios neglected AR
Semantic neglected IN Protocol limiting interactions IN
Low efficiency PF Optimal distribution unreachable PR
Conflicting sub-optimal allocations RL No dynamic rescheduling PR
Bounded applicability (issues/agents/interactions) PR Dynamics Non-analyzable RL
Feasibility non-observable RL Execution’s correctness non-observable RL
Risk of injection RL Risk of collusion RL
Legend
AR Architectural FL Flexibility PR Performance IN Interaction RL Reliability
parallel negotiations (Sandholm, 1993). This insta-
bility (Ito et al., 2008; Golfarelli et al., 1997) does
not come alone. Hence, some approaches introduce
single points of failure (Krothapalli and Deshmukh,
1999) such as the coordinator or moderator which can
also be affected by a limited knowledge (Hanachi and
Sibertin-Blanc, 2004; Vulkan and Jennings, 2000).
In the “Open-For-All environment” (Vulkan and Jen-
nings, 2000), there is a more pronounced incapability
to apply tactics at any instant (Faratin et al., 1998),
difficulties in defining/updating constraints and sys-
tem features (Hanachi and Sibertin-Blanc, 2004; Jen-
nings et al., 2001), an uncontrolled network traf-
fic growth (Jennings et al., 2001; Faratin et al.,
1998), expansion issues (Krothapalli and Deshmukh,
1999), and neglected additional overheads (Singh
et al., 2010) (e.g., due to increasing computational
costs (Ito et al., 2008; Wan et al., 2007)) hamper
dramatically the systems’ scalability. In terms of
reusability, certain approaches present limited appli-
cation domain (Krothapalli and Deshmukh, 1999;
Aknine, 1998) (e.g., not considering competitive
agents (Sandholm, 1993)). Low level and techno-
logically committed approaches do not consider the
semantic (Smith, 1980), thus concurring to gener-
ate interaction issues (Mazouzi et al., 2002; Jian,
2008). In term of performance, several studies re-
fer to a general “low performance” (Krothapalli and
Deshmukh, 1999; Ito et al., 2007), inefficiency (Ito
and Shintani, 1997), and “non-optimality” (Vulkan
and Jennings, 2000; Zhou et al., 2004). In particu-
lar, some approaches do not offer automatic mecha-
nisms (Shen and Norrie, 1998) for task/resource run-
time rescheduling. In same cases, scaling issues and
agents (Wan et al., 2007) may arise problems as well
(e.g., in (Ito et al., 2008), no more than two agents
and seven issues can be properly handled). For exam-
ple, in (Wellman and Wurman, 1998) there is a lack of
in-depth analysis mechanisms, and in (Hsieh, 2002)
checking the feasibility can be difficult or impossi-
ble(referred to cooperative communities). Finally, in
terms of security, checking or enforcing the course
of conversation is not always possible (Hanachi and
Sibertin-Blanc, 2004). Some protocols leave the door
open to possible injections, allowing “strategic lying”
(tricking agents into believing the liars are trustwor-
thy. Thus, they can exploit the unaware agents) (Ram-
churn et al., 2004). Agents collusion is also a lim-
itation and hence, a limited amount of mechanisms
deal with “agent reputation” preventing such unde-
sired circumstances (Ramchurn et al., 2004).
4 DISCUSSION
Exploiting the MAS’ capability of negotiating in CPS
represents a great potential, and it will be one of the
main challenges for MAS in the upcoming years. Ac-
cording to Calvaresi et al. (Calvaresi et al., 2017a),
MAS are still not ready to face strict timing con-
straints which strongly characterize the CPS. Never-
theless, many characteristics of the investigated nego-
tiation protocols confirm such a potential. The agents
in MAS can be seen as distributed nodes in CPS.
Hence, they are assumed as autonomous, concurrent,
coordinated, rational, multi-role, self-interested and
loosely coupled. Computational and functional ca-
pabilities, communication (asynchronous), resources,
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
232

and knowledge are considered limited. Resources can
be shared, tasks in the system can be independent, ar-
chitectures can be heterogeneous, and a mechanism
for fault-tolerance has to be feasible. Sub-optimal re-
source allocations have to be reached in polynomial
time. Unfortunately, some assumptions profoundly
characterizing many negotiation protocols make them
unable to cope with the requirements of CPS. In par-
ticular, in the presence of safety-critical CPS, assump-
tions such as “no-commitment is required, the possi-
bility of delegations, and only a vaguely defined time
efficiency” hamper the system reliability. In terms of
requirements, the impossibility to quit a running task,
the non retractability of bidding, the possibility of us-
ing different agent heuristics, the desired guarantee
of respecting deadlines (for manufactured goods), and
the presence of precedence constraints, go in the same
direction of many CPS requirements.
Nevertheless, requirements such as the introduc-
tion of a mediator mechanism to “simplify” the sys-
tem dynamics, the possibility for the agents of chang-
ing their nature/identity, and unconstrained permis-
sion of agents to participate in multiple bids and
tasks, cannot be accepted. Strength is strongly sub-
jected to the combination of requirements and as-
sumptions. Thus, given such biases, anything inferred
may result in inconsistent hypothesis. Instead, in the
same situation, analyzing the limitations gives already
important clues. The algorithms can be defined as in-
adequate to be employed in safety-critical CPS due to
the lack of commitment constraints, the difficulties in
checking the feasibility, breaking contracts allowed
by simply “paying” penalties, admission of a single
point of failure, and impossibility of being scalable.
5 CONCLUSIONS
This paper proposed an SLR applied to 143 primary
studies to explore the assumptions standing behind
the negotiation protocol in MAS and the requirements
the different approaches set. Finally, strengths and
limitations have been investigated to understand what
has been done and what is still missing from the
safety-critical CPS perspective.
The negotiation process in such systems involves
smart nodes in distributed networks. The conven-
tional decision-making processes performed in CPS
are subject to more stringent constraints with respect
to the ones characterizing traditional agent-based ap-
plications. The limitations presented in 3.4 and dis-
cussed in Section 4 depict a scenario in which the
most relevant missing feature is the reliability.
Under the same assumption, bridging the gap be-
tween MAS and CPS (e.g., enabling the respect of
strict timing constraints) can unveil new application
scenarios in domestic, manufacturing, and healthcare
domains. Finally, the analyzed techniques assume to
operate in trusted environments. So far, if such a hy-
pothesis is missing, the risk of injections and collu-
sions is quite high. Hence, security challenges ap-
peared to be still open, requiring to secure the systems
at several levels.
Further work shall include the identification of the
reliability of the primary objective, and the sets of
assumptions and requirements that have to be rede-
fined accordingly. Consequently, MAS would have
to be purged from the inadequate components, which
consist of several interventions in terms of theoret-
ical contributions and practical development of new
mechanisms. The proposed enhancements regard the
agent local scheduler, and the communication middle-
ware properly coupled with a new negotiation proto-
col based on concepts such as utilization factor and
resource reservation (Calvaresi et al., 2017a).
REFERENCES
Aknine, S. (1998). Issues in cooperative systems: Ex-
tending the contract net protocol. In Intelligent Con-
trol (ISIC), 1998. Held jointly with IEEE Interna-
tional Symposium on Computational Intelligence in
Robotics and Automation (CIRA), Intelligent Systems
and Semiotics (ISAS), Proceedings, pages 582–587.
Aknine, S., Pinson, S., and Shakun, M. F. (2004). An ex-
tended multi-agent negotiation protocol. Autonomous
Agents and Multi-Agent Systems.
Alberti, M., Daolio, D., Torroni, P., Gavanelli, M., Lamma,
E., and Mello, P. (2004). Specification and verification
of agent interaction protocols in a logic-based system.
In Proceedings of the 2004 ACM symposium on Ap-
plied computing, pages 72–78. ACM.
Atkinson, K., Bench-Capon, T., and Mcburney, P. (2005). A
dialogue game protocol for multi-agent argument over
proposals for action. Autonomous Agents and Multi-
Agent Systems, 11(2):153–171.
Bellifemine, F. L., Caire, G., and Greenwood, D. (2007).
Developing multi-agent systems with JADE, volume 7.
John Wiley & Sons.
Budaev, D., Amelin, K., Voschuk, G., Skobelev, P., and
Amelina, N. (2016). Real-time task scheduling for
multi-agent control system of uav’s group based on
network-centric technology. In Control, Decision
and Information Technologies (CoDIT), 2016 Interna-
tional Conference on, pages 378–381. IEEE.
Calvaresi, D., Cesarini, D., Sernani, P., Marinoni, M., Drag-
oni, A., and Sturm, A. (2016a). Exploring the ambient
assisted living domain: a systematic review. Journal
of Ambient Intelligence and Humanized Computing,
pages 1–19.
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review
233

Calvaresi, D., Claudi, A., Dragoni, A., Yu, E., Accattoli, D.,
and Sernani, P. (2014). A goal-oriented requirements
engineering approach for the ambient assisted living
domain. In Proceedings of the 7th International Con-
ference on PErvasive Technologies Related to Assis-
tive Environments, PETRA ’14, pages 20:1–20:4.
Calvaresi, D., Marinoni, M., Sturm, A., Schumacher, M.,
and Buttazzo, G. (2017a). The challenge of real-
time multi-agent systems for enabling iot and cps. in
proceedings of IEEE/WIC/ACM International Confer-
ence on Web Intelligence (WI’17).
Calvaresi, D., Schumacher, M., Marinoni, M., Hilfiker, R.,
Dragoni, A., and Buttazzo, G. (2017b). Agent-based
systems for telerehabilitation: strengths, limitations
and future challenges. In proceedings of X Workshop
on Agents Applied in Health Care.
Calvaresi, D., Sernani, P., Marinoni, M., Claudi, A., Balsini,
A., Dragoni, A. F., and Buttazzo, G. (2016b). A
framework based on real-time os and multi-agents for
intelligent autonomous robot competitions. In 2016
11th IEEE Symposium on Industrial Embedded Sys-
tems (SIES), pages 1–10.
Cardoso, R. C. and Bordini, R. H. (2016). Allocating social
goals using the contract net protocol in online multi-
agent planning. In Intelligent Systems (BRACIS), 2016
5th Brazilian Conference on, pages 199–204. IEEE.
Chang, M. K. and Woo, C. (1994). A speech-act-based ne-
gotiation protocol: design, implementation, and test
use. ACM Transactions on Information Systems.
Collins, J., Tsvetovat, M., Mobasher, B., and Gini, M.
(1998a). Magnet: A multi-agent contracting system
for plan execution. In Proc. of SIGMAN.
Collins, J. and Wolfgang Ketter, M. G. (2002). A multi-
agent negotiation testbed for contracting tasks with
temporal and precedence constraints. International
Journal of Electronic Commerce, 7(1):35–57.
Collins, J., Youngdahl, B., Jamison, S., Mobasher, B., and
Gini, M. (1998b). A market architecture for multi-
agent contracting. In Proceedings of the second in-
ternational conference on Autonomous agents, pages
285–292. ACM.
Demazeau, Y. (1995). From interactions to collective be-
haviour in agent-based systems. In Proceedings of the
1st. European Conference on Cognitive Science.
El Fallah-Seghrouchni, A., Haddad, S., and Mazouzi, H.
(1999). Protocol engineering for multi-agent inter-
action. In European Workshop on Modelling Au-
tonomous Agents in a Multi-Agent World, pages 89–
101. Springer.
Faratin, P., Sierra, C., and Jennings, N. R. (1998). Ne-
gotiation decision functions for autonomous agents.
Robotics and Autonomous Systems, 24:159–182.
Ferber, J. and Gutknecht, O. (1998). A meta-model for
the analysis and design of organizations in multi-agent
systems. In Multi Agent Systems, 1998. Proceedings.
International Conference on, pages 128–135. IEEE.
Galster, M., Weyns, D., Tofan, D., Michalik, B., and Avge-
riou, P. (2014). Variability in software systems-a sys-
tematic literature review. IEEE Transactions on Soft-
ware Engineering, 40(3):282–306.
Garcia, E., Cao, Y., and Casbeer, D. W. (2017). Periodic
event-triggered synchronization of linear multi-agent
systems with communication delays. IEEE Transac-
tions on Automatic Control, 62(1):366–371.
Golfarelli, M., Maio, D., and Rizzi, S. (1997). A task-
swap negotiation protocol based on the contract net
paradigm. DEIS, Universit
´
a di Bologna.
Guttman, R. H. and Maes, P. (1998). Cooperative vs. com-
petitive multi-agent negotiations in retail electronic
commerce. In International Workshop on Coopera-
tive Information Agents, pages 135–147. Springer.
Hanachi, C. and Sibertin-Blanc, C. (2004). Protocol mod-
erators as active middle-agents in multi-agent sys-
tems. Autonomous Agents and Multi-Agent Systems,
8(2):131–164.
Hong-tao, L. and Kang, F.-j. (2016). Distributed task allo-
cation modeling based on agent topology and protocol
for collaborative system. Optik-International Journal
for Light and Electron Optics, 127(19):7776–7781.
Hsieh, F.-S. (2002). Modeling and control of holonic manu-
facturing systems based on extended contract net pro-
tocol. In American Control Conference, 2002. Pro-
ceedings of the 2002, volume 6, pages 5037–5042.
Ito, T., Hattori, H., and Klein, M. (2007). Multi-issue nego-
tiation protocol for agents: Exploring nonlinear utility
spaces. In IJCAI, volume 7.
Ito, T., Klein, M., and Hattori, H. (2008). A multi-issue ne-
gotiation protocol among agents with nonlinear utility
functions. Multiagent and Grid Systems.
Ito, T. and Shintani, T. (1997). Persuasion among agents:
An approach to implementing a group decision sup-
port system based on multi-agent negotiation. In In-
ternational Joint Conference on Artificial Intelligence,
volume 15, pages 592–599.
Jennings, N. R., Faratin, P., Lomuscio, A. R., Parsons, S.,
Wooldridge, M., and Sierra, C. (2001). Automated ne-
gotiation: prospects, methods and challenges. Group
Decision and Negotiation, pages 199–215.
Jian, L. (2008). An agent bilateral multi-issue alternate
bidding negotiation protocol based on reinforcement
learning and its application in e-commerce. In Int.
Symposium on Electronic Commerce and Security,,
pages 217–220.
Kanchanasevee, P., Biswas, G., Kawamura, K., and Tamura,
S. (1999). Contract-net based scheduling for holonic
manufacturing systems. PhD thesis.
Kitchenham, B., Brereton, P., Turner, M., Niazi, M.,
Linkman, S., Pretorius, R., and Budgen, D. (2010).
Refining the systematic literature review process-two
participant-observer case studies. Empirical Software
Engineering, 15(6):618–653.
Kitchenham, B., Pearl Brereton, O., Budgen, D., Turner,
M., Bailey, J., and Linkman, S. (2009). Systematic lit-
erature reviews in software engineering - a systematic
literature review. Information and Software Technol-
ogy, 51(1):7–15.
Kraus, S. (1997). Negotiation and cooperation in multi-
agent environments. Artificial intelligence, 94(1-
2):79–97.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
234

Krothapalli, N. K. C. and Deshmukh, A. V. (1999). Design
of negotiation protocols for multi-agent manufactur-
ing systems. International journal of production re-
search, 37(7):1601–1624.
Marzougui, B. and Barkaoui, K. (2013). Interaction proto-
cols in multi-agent systems based on agent petri nets
model. Interaction, 4(7):2013.
Matt, P.-A., Toni, F., and Dionysiou, D. (2006). The
distributed negotiation of egalitarian resource alloca-
tions. In Proceedings of the 1st international work-
shop on computational social choice (COMSOC06),
pages 304–316.
Mazouzi, H., Seghrouchni, A. E. F., and Haddad, S. (2002).
Open protocol design for complex interactions in
multi-agent systems. In Proc. of 1st. international
joint conference on Autonomous agents and multia-
gent systems.
Odell, J., Parunak, H. V. D., and Bauer, B. (2000). Extend-
ing uml for agents. Ann Arbor, 1001:48103.
Odell, J. J., Parunak, H. V. D., and Bauer, B. (2001). Repre-
senting agent interaction protocols in uml. In Agent-
oriented software engineering.
Olfati-Saber, R., Fax, J. A., and Murray, R. M. (2007). Con-
sensus and cooperation in networked multi-agent sys-
tems. Proceedings of the IEEE, 95(1):215–233.
Ouelhadj, D., Garibaldi, J., MacLaren, J., Sakellariou, R.,
Krishnakumar, K., and Meisels, A. (2005). A multi-
agent infrastructure and a service level agreement ne-
gotiation protocol for robust scheduling in grid com-
puting. In EGC.
Purvis, M., Nowostawski, M., Oliveira, M., and Crane-
field, S. (2003). Multi-agent interaction protocols of
e-business. In International Conference on Intelligent
Agent Technology. IEEE/WIC, pages 318–324. IEEE.
Rajkumar, R. R., Lee, I., Sha, L., and Stankovic, J. (2010).
Cyber-physical systems: the next computing revolu-
tion. In Proceedings of the 47th Design Automation
Conference, pages 731–736. ACM.
Ramchurn, S. D., Huynh, D., and Jennings, N. R. (2004).
Trust in multi-agent systems. The Knowledge Engi-
neering Review, 19(1):1–25.
Russell, S., Norvig, P., and Intelligence, A. (1995). A mod-
ern approach. Artificial Intelligence. Prentice-Hall,
Egnlewood Cliffs, 25:27.
Sandholm, T. (1993). An implementation of the contract
net protocol based on marginal cost calculations. In
AAAI, volume 93, pages 256–262.
Shen, W. and Norrie, D. H. (1998). An agent-based ap-
proach for dynamic manufacturing scheduling. In
Proc. of Workshop on Agent-Based Manufacturing.
Singh, A., Juneja, D., and Sharma, A. (2010). Introducing
trust establishment protocol in contract net protocol.
In Advances in Computer Engineering (ACE), 2010
International Conference on, pages 59–63. IEEE.
Smith, R. G. (1980). The contract net protocol: High-level
communication and control in a distributed problem
solver. IEEE Transactions on computers.
Smith, R. G. and Davis, R. (1981). Frameworks for coop-
eration in distributed problem solving. IEEE Transac-
tions on systems, man, and cybernetics.
Sun, D. and Wu, J. (2009). Multi-agent coordination based
on contract net protocol. In Int. Symposium on Intelli-
gent Ubiquitous Computing and Education.
Vok
ˇ
r
´
ınek, J., B
´
ıba, J., Hod
´
ık, J., Vyb
´
ıhal, J., and P
ˇ
echou
ˇ
cek,
M. (2007). Competitive contract net protocol. Theory
and Practice of Computer Science.
Vulkan, N. and Jennings, N. R. (2000). Efficient mecha-
nisms for the supply of services in multi-agent envi-
ronments. Decision Support Systems, 28(1):5–19.
Wan, W.-n., Zhang, J.-q., and Wang, M. (2007). A multi-
agent negotiation protocol based on extended case
based reasoning. In IV International Conference on
Fuzzy Systems and Knowledge Discovery, volume 4,
pages 462–467. IEEE.
Wang, G., Wong, T., and Wang, X. (2014). A hybrid multi-
agent negotiation protocol supporting agent mobility
in virtual enterprises. Information Sciences, 282.
Wanyama, T. and Far, B. H. (2007). A protocol for multi-
agent negotiation in a group-choice decision making
process. Journal of Network and Computer Applica-
tions, 30(3):1173–1195.
Wellman, M. P. and Wurman, P. R. (1998). Market-aware
agents for a multiagent world. Robotics and Au-
tonomous Systems, 24(3-4):115–125.
Wu, J. (2008). Contract net protocol for coordination in
multi-agent system. In Intelligent Information Tech-
nology Application, 2008. IITA’08. Second Interna-
tional Symposium on, volume 2, pages 1052–1058.
Xueguang, C. and Haigang, S. (2004). Further extensions
of fipa contract net protocol: threshold plus doa. In
Proceedings of the 2004 ACM symposium on Applied
computing, pages 45–51. ACM.
Zhou, P.-C., Hong, B.-R., Wang, Y.-H., and Zhou, T. (2004).
Multi-agent cooperative pursuit based on extended
contract net protocol. In Machine Learning and Cy-
bernetics, 2004. Proceedings of 2004 International
Conference on, volume 1, pages 169–173. IEEE.
Zlotkin, G. and Rosenschein, J. S. (1991). Incomplete in-
formation and deception in multi-agent negotiation. In
IJCAI, volume 91, pages 225–231.
Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review
235
