
A Wearable Silent Speech Interface based on Magnetic Sensors with
Motion-Artefact Removal
Lam A. Cheah
1
, James M. Gilbert
1
, Jose A. Gonzalez
2
, Phil D. Green
2
, Stephen R. Ell
3
,
Roger K. Moore
2
and Ed Holdsworth
4
1
School of Engineering, The University of Hull, Kingston upon Hull, U.K.
2
Department of Computer Science, The University of Sheffield, Sheffield, U.K.
3
Hull and East Yorkshire Hospitals Trust, Castle Hill Hospital, Cottingham, U.K.
4
Practical Control Ltd, Sheffield, U.K
Keywords: Silent Speech, Permanent Magnet Articulography, Assistive Technology, Motion Artefact Removal,
Magnetic Sensors.
Abstract: For a silent speech interface (SSI) to be truly practical, it has to be able to tolerate motion artefacts generated
by the user while engaging in normal activities of everyday living. This paper presents a wearable speech
restoration system based on magnetic sensors with an integrated background cancellation technique to
eliminate the effect of motion-induced interference. The background cancellation technique is assessed when
the user makes no intentional movement, when they performs a set of defined head movements and when they
make more natural, conversational head movements. The performance is measured for the TIDigits corpus in
terms of whole word recognition rate using a Hidden Markov Model and through Mel Cepstral Distortion for
a Direct Synthesis of speech using Deep Neural Networks. The results indicate the robustness of the sensing
system with background cancellation against the undesirable motion-induced artefacts.
1 INTRODUCTION
Speech is perhaps the most convenient and natural
way of communication between humans. People
whose larynx has been surgically removed following
throat cancer, trauma or destructive throat infection
find themselves struggling with vocal communication
after losing their voice. This often has a severe impact
on people’s lives, which can lead to social isolation,
feelings loss of identity and depression (Fagan et al.,
2008; Danker et al., 2010). Unfortunately, existing
post-laryngectomy voice restoration methods (i.e.
oesophageal speech, the electrolarynx and speech
valves) are often limited by their usability and
abnormal voice quality (e.g. robotic and masculine
voice), which may be unsatisfactory especially for
female patients (Fagan et al., 2008). Typing-based
alternative and augmentative communication (AAC)
devices can also be employed, but are limited by slow
manual text input.
To overcome the limitation of existing methods,
assistive technologies (ATs) such as silent speech
interfaces (SSIs) have emerged and shown promising
potentials in recent years. A SSI is a system that
enables speech communication in the absence of
audible speech by exploiting other non-audible
signals associated with speech production (Denby et
al., 2010). Because of their unique feature, SSIs can
also be deployed in other scenarios such as spoken
communication aid in noisy environments or where
privacy/confidentiality is desirable. To date, there are
several types of SSIs using different modalities, such
as the electrical activity produced by the articulator
muscles (Brumberg et al., 2010; Herff et al., 2015),
the brain’s electrical activity (Schultz and Wand,
2010; Wand et al., 2014), or the movement of speech
articulators (Toda et al., 2008; Gilbert et al., 2010;
Hueber et al., 2010). Despite the attractive attributes
of SSIs, many are still deemed as impractical and
ineffective outside laboratory environment. Factors,
such as a high degree of intrusiveness, discomfort,
unattractive appearance, unintelligible speech quality
and artefacts/noise interference, affect their real-
world implementation (Denby et al., 2010).
56
Cheah, L., Gilbert, J., Gonzalez, J., Green, P., Ell, S., Moore, R. and Holdsworth, E.
A Wearable Silent Speech Interface based on Magnetic Sensors with Motion-Artefact Removal.
DOI: 10.5220/0006573200560062
In Proceedings of the 11th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018) - Volume 1: BIODEVICES, pages 56-62
ISBN: 978-989-758-277-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The present work builds upon the permanent
magnet articulography (PMA), which is a sensing
technique for articulator motion capture (Fagan et al.,
2008; Gilbert et al., 2010; Hofe et al., 2013; Cheah et
al., 2015). In previous work, progresses were reported
in terms of the hardware, user-centric design (Cheah
et al., 2015) and speech processing (Gonzalez et al.,
2016). However, measurements from wearable
devices (including PMA) are known to be susceptive
to motion-induced interference (Such, 2007).
Comparing to measurements acquired within
laboratory settings, which are generally conducted
when subjects are in steady positions, measuring
outside the laboratory faces the problem of motion
artefacts arising from unrestricted head movements
(i.e. corruption by varying earth’s magnetic field) by
the subjects. For a PMA based device to be practical
and effective in the field, integration of motion
artefact cancellation into current prototype is
therefore critical.
The remainder of this paper is structured as
follows. Section 2 describes the PMA prototype and
the proposed background cancellation technique.
Section 3 discusses about the performance of the
PMA system, followed by the experimental results in
Section 4. The final section concludes this paper and
provides an outlook for future work.
2 MATERIAL AND METHOD
2.1 System Design
PMA is a technique for capturing the movement of
the speech articulators by sensing changes in the
magnetic field generated by a set of permanent
magnets attached to the speech articulators (i.e. lips
and tongue) by a set of magnetic sensors arranged
around the mouth. The acquired data may then be
used to determine the speech which the user wishes
to produce, either by performing automatic speech
recognition (ASR) on the PMA data (i.e. recognize-
then-synthesis) (Hofe et al., 2013; Cheah et al., 2015),
or by directly synthesizing audible speech from the
articulatory data (i.e. direct synthesis) (Gonzalez et
al., 2016). Contrary to other methods for articulator
motion capture, PMA does not attempt to identify the
Cartesian position or orientation of the magnets, but
rather a composite of the magnetic fields from
magnets that are associated with a particular
articulatory gesture. The current PMA system
consists of six cylindrical Neodymium Iron Boron
(NdFeB) magnets: four on the lips (Ø1mm×5mm),
one on the tongue tip (Ø2mm×4mm) and one on the
tongue blade (Ø5mm×1mm), as illustrated in figure
1(a). These magnets are temporarily attached using
Histoacryl surgical tissue adhesive (Braun,
Melsungen, Germany) during experimental trials, but
will be surgically implanted for long term usage. The
remainder of the PMA system is composed of four tri-
axial anisotropic magnetoresistive (AMR) sensors
mounted on a bespoke wearable headset, a control
unit, a rechargeable battery and a wireless link to a
processing unit (e.g. computer/PC), as shown in
figure 1(b).
The PMA has distinct advantages over other SSIs,
such as being unobtrusive with no wires coming out
of the mouth or electrodes attached to the skin, which
may cause unwanted attention in public. Moreover,
the PMA system is also relatively lightweight and
highly portable. In addition, the current prototype has
extensively improved over its predecessors
particularly in terms of appearance, comfort and
ergonomic factors for the users, but without
compromising on the speech performances (Cheah et
al., 2015).
2.2 Cancellation of Motion-induced
Interferences
As illustrated in Fig, the first three sensors located
closer to the mouth (Sensor1-3) are used to monitor
the articulators. The data acquired by any of these
sensors (S
A
) is made up of the desired signal from one
or more of the magnetic markers (A), and other
‘background’ signals (B
A
), the most significant of
which is generally the result of the earth’s magnetic
field. Hence:
(1)
Movement of the user’s head results in significant
interference to the field detected by the sensors and it
has been found that the desired signal derived from
the articulator movements are up to 10 times smaller
than the changes resulting from typical head
movements. This result in a poor signal-to-noise
(SNR), which degrades the performance of the speech
restoration algorithms, thus eliminating the head
motion-induced interference is necessary.
A Wearable Silent Speech Interface based on Magnetic Sensors with Motion-Artefact Removal
57
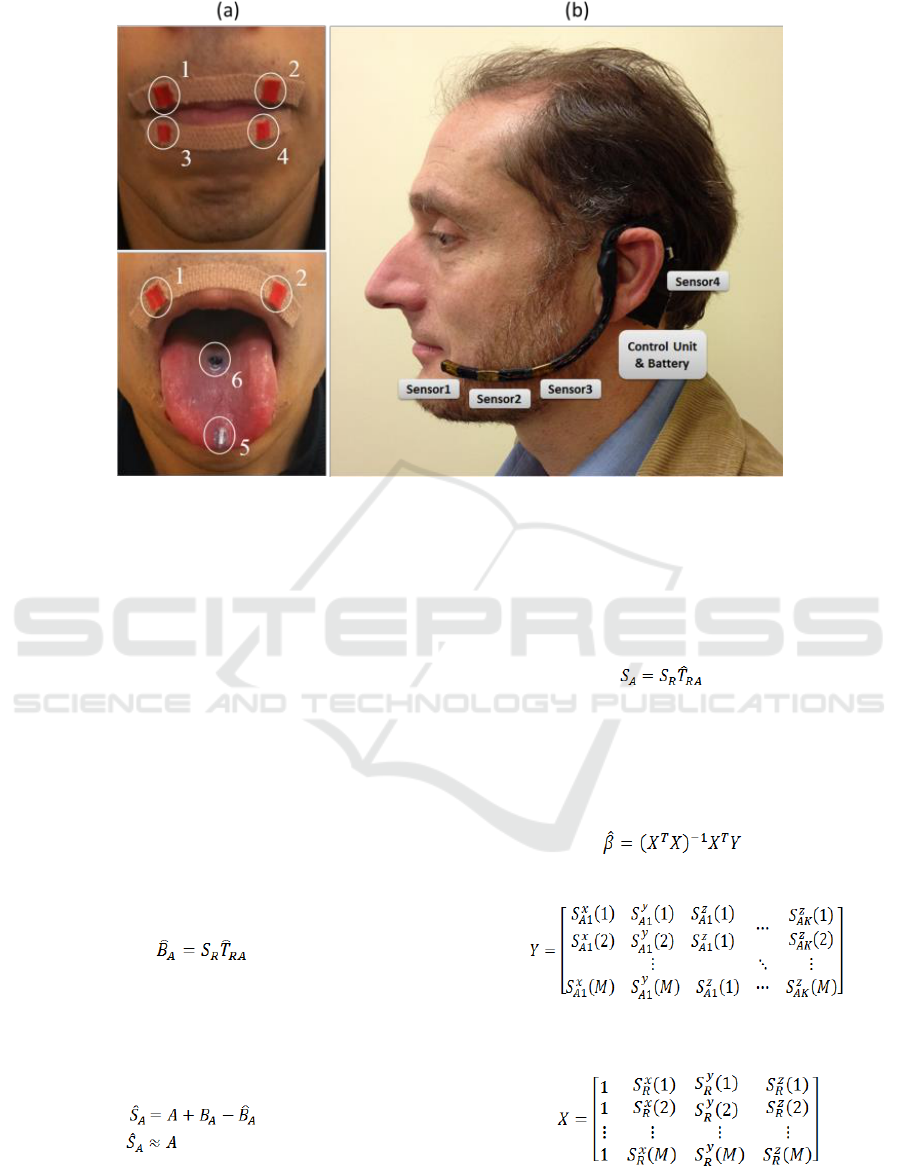
Figure 1: (a) Arrangement of magnetic markers placed on the tongue and lips. (b) Wearable PMA headset with 4 tri-axial
magnetic sensors, control unit and battery.
Although head movements typically result in
lower frequency signals than articulatory movement,
there is significant overlap in their respective
frequency spectral, thus making conventional
filtering ineffective.
The method proposed here is to reduce the effect
of these background signals by utilizing a reference
sensor (S
R
) located farther from the mouth (Sensor4)
as shown in figure 1(b). This is placed at a distance
far from the magnetic markers but rigidly attached to
the PMA headset so that it moves with the articulator
sensors (S
A
) and so measures the ambient magnetic
field. Hence, the aim is to estimate B
A
and cancel out
the effect of the background field on the articulator
sensor signal in (1). The estimate of B
A
may be
calculated as:
(2)
where T
RA
is a transformation between reference
sensor and the articulator sensors. The estimate from
(2) is then used to remove the background field from
an articulator sensor and leave only the desired
articulatory signal:
(3)
The required transformation T
RA
could be calculated
from the relative orientation of reference and
articulator sensors but this is difficult to measure and
will change if the headset becomes distorted. Instead,
it can be estimated by taking a series of measurement
of S
A
and S
R
while rotating the PMA headset in the
absence of any articulator movement i.e. A 0, where
(1) substitute into (3):
(4)
From (4), T
RA
is estimated via the least square method
to determine the best cancellation coefficients.
Assuming a model Y Xβ ε and a set of M
measurements of Y and X, then using the least squares
method, the best estimate β of is
(5)
where
is a set of M samples of the K articulator sensor
outputs (each with x, y and z components) and
is a set of M samples of the x, y and z components of
the magnetic field at the reference sensor, β
is a 4×K
BIODEVICES 2018 - 11th International Conference on Biomedical Electronics and Devices
58

matrix of cancellation coefficients and ε is the
estimation error which we seek to minimize.
(6)
The first row in (6) is a constant offset cancellation
term followed by 3 cancellation coefficients
corresponding to the estimated transformation matrix
T
RA
. Hence, in addition to removing the effect of the
background field, any offset on the articulator sensor
output is also removed.
3 PERFORMANCE
EVALUATION
3.1 Experimental Setup
The data used for this evaluation were collected from
a male native English speaker who is proficient in the
usage of the PMA device. Magnets were temporarily
attached to the subject’s lips using medical adhesive
strips and the tongue using medical adhesive
(Histoacryl®, Braun, Melsungen, Germany), as
illustrated in figure 1(a). and the PMA headset is
shown in figure 1(b). University research ethics
committee approval was obtained for this procedure.
It may be noted that the removal of the tongue
magnets causes temporary, mild discomfort but that
the intention is that magnets, with a biocompatible
protective coating, would be permanently implanted
into the articulators of long-term users.
For optimal sound quality, the recording was
conducted in an acoustically isolated room using a
shock-mounted AKG C1000S condenser microphone
via a dedicated stereo Lexicon Lambda USB-sound
card. The audio and PMA signals were recorded
simultaneously at sampling frequencies of 16 kHz
and 100 Hz. A bespoke Matlab-based GUI was
created to provide visual prompt of randomized
utterances to the subject at an interval of 5 seconds
during the recording session.
3.2 Vocabulary and Data Recording
To evaluate the performance of the proposed
background cancellation method, sentences from the
TIDigits database (Leonard, 1984), which consists of
sequences of up to seven connected English digits,
were recorded. The vocabulary is made up of eleven
individual digits, i.e. from ‘one’ to ‘nine’, plus ‘zero’
and ‘oh’ (both representing digit 0). Each dataset
consists of 77 digits sequences, and a total six datasets
were recorded, giving 462 utterances containing 1518
individual digits.
For model training, 3 datasets (231 utterances)
with no intentional head movements were employed,
while the testing was carried out with 1 dataset (77
utterances) for each of three conditions: i) no
intentional movement, ii) fixed angle movements
where the subject was asked to rotate his head to look
at a sequence of markers and speak as prompted.
These markers were arranged to give 30° rotation left
and right and 22° tilt upwards and downwards, iii)
conversational movements where subject was asked
to read the prompt and speak while simultaneously
moving their head in gestures which might be made
during conversation e.g. shaking from side to side,
nodding up and down, and tilting side to side.
3.3 Evaluation
Speech recognition and direct synthesis (i.e. generation
of audible speech from PMA data) experiments were
used to evaluate the performance of our system. For
speech recognition, whole-word hidden Markov
models (HMMs) were trained on PMA data as
described (Cheah et al., 2015). The word accuracy
results (i.e. percentage of words correctly recognized
after discounting the insertion errors) achieved by our
PMA system are reported here as an objective measure
of the system performance for speech recognition. For
direct synthesis, a deep neural network (DNN) with 3
hidden layers and 128 sigmoid units per layer was
trained on simultaneous recordings of PMA and speech
data to predict the acoustic signals from the articulator
movement. As described in (Gonzalez et al., 2017), the
DNN was trained on feature vectors extracted from the
raw PMA and speech signals. The speech signals were
parameterized as 27 dimensional-feature vectors
computed every 5ms from analysis windows spanning
25ms of data: 25 Mel-frequency cepstral coefficients
(MFCCs), fundamental frequency (F
0
) in log-scale and
binary voicing decision. The PMA signals were
parameterized as segmental features by applying the
principal component analysis (PCA) technique for
dimensionality reduction over symmetric windows
spanning 105ms of articulator movement data.
Performance on direct synthesis was evaluated by
comparing the speech features extracted from the
original signals with those predicted by the DNN from
PMA data using the following objective measures:
Mel-Cepstral distortion (MCD) (Kubichek et al.,
1993) in dBs for the MFCCs, root mean square error
(RMSE) for F
0
and voicing error rate.
A Wearable Silent Speech Interface based on Magnetic Sensors with Motion-Artefact Removal
59
4 RESULTS AND DISCUSSION
4.1 Performance of the Background
Cancellation Scheme
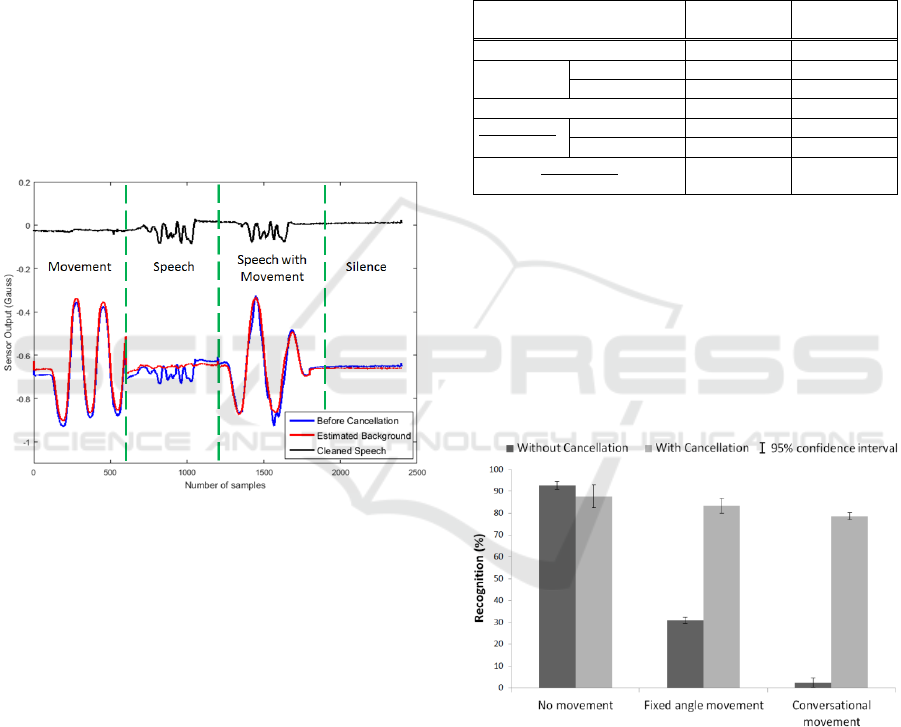
The performance of the background cancellation
scheme is illustrated in figure 2 for a single articulator
sensor output. In this trial, a participant made a series
of head movements (tilting the head from side to side)
and the uttered a digit sequences (i.e. ‘8428136’)
without head movement followed by simultaneous
utterance with same sequence of head movement. It
can be seen in the raw data as shown in figure 2, that
the effect of the head movement is approximately 5
times larger than the signals resulting from speech.
After background cancellation, the effect of head
movement has been almost entirely removed (during
the ‘Movement’ phase in figure 2).
Figure 2: Articulator sensor signal (Sensor3, y-axis) with
and without cancellation.
The effect of the background cancellation can be
quantified by comparing the rms of magnetic flux
density variations resulting from articulation and
head movement, before and after cancellation. In
addition, the variation in measured flux density in the
absence of both head movement and articulation
(‘Silence’ as illustrated in figure 2) is also calculated
as this represents the ‘noise floor’ below which
signals would be undetectable. The rms values of
these quantities for a dataset of 100s speech and 80s
of movements are given, along with relevant ratios in
table 1.
From table 1 we see that the mean rms during
articulation before cancellation is 2-3 times smaller
than the signal resulting from head movement. In
other words, the signal is buried in the background.
After cancellation, the articulation signal amplitude
remains largely unchanged but the amplitude of the
signal resulting from movement has reduced by a
factor of approximately 15-20, thus the desired
articulation signal is now 6 times larger than the
background. On the other hand, the process of
background cancellation has not significantly
affected the level of noise during silence and so the
articulation signal remains at least 10 times larger
than the noise floor.
Table 1: Articulation, background and noise level before
and after cancellation.
Before
Cancellation
After
Cancellation
Articulation (mG)
20.96
20.69
Movement
(mG)
Fixed Angle
38.57
2.8
Conversational
59.13
3.37
Silence
1.79
1.46
Articulation
Movement
Fixed Angle
0.54
6.85
Conversational
0.35
6.14
Articulation
Silence
11.39
13.97
4.2 Performance of PMA System in
Speech Recognition
Figure 3 shows the word accuracy results on the
speech recognition experiment with and without
background cancellation applied to the PMA data.
Without background cancellation, the recognition
performance in the presence of movement
deteriorates significantly (down to about 2%).
Figure 3: Word recognition rates with and without
background cancellation.
The use of background cancellation deteriorates
slightly the results in the absence of movement but
causes a large improvement in recognition in the
presence of movement. It should also be noted that
asking the participant to move and speak at the same
time causes some difficulties since, for instance, the
subject tend to hesitate and stumble over words more
because they are not continually looking at the
BIODEVICES 2018 - 11th International Conference on Biomedical Electronics and Devices
60

Table 2: Articulation, background and noise level before and after cancellation.
Movement
Cancellation
MCD (dB)
F
0
RMSE(Hz)
Voicing error rate
(%)
No movement
No
5.02
22.82
15.90
Yes
3.91
19.48
15.73
Fixed Angle movement
No
5.53
27.80
26.40
Yes
4.55
19.71
16.36
Conversational movement
No
6.41
26.73
28.37
Yes
4.49
17.01
16.18
prompt. Hence, some deterioration in recognition
may be due to changes in articulation rather than a
failure of the background cancellation scheme.
4.3 Performance of PMA System in
Direct Synthesis
Table 2 shows the results obtained on the direct
synthesis experiment. For each type of speech feature
(i.e. MFCC, F
0
, and voicing decision) the error made
by the DNN when predicting the feature from PMA
data is shown. As in the speech recognition
experiment, significant improvements are obtained
for all types of features when background
cancellation is applied. Again, the most detrimental
movement when no compensation is applied is the
conversational movement. However, when
cancellation is applied, the performance results
obtained for both types of movements is similar. In
any case, from informal listening, intelligible speech
is obtained for all movements types when background
cancellation is applied on the PMA data.
5 DISCUSSION
The background cancellation results presented in this
paper are derived for a single male subject who is
proficient in use of the PMA system. The
performance of the Direct Synthesis approach for a
small number of different speakers without
intentional head movement, but with background
cancellation active, is described in (Gilbert et al.,
2017). In that paper, three male subjects and one
female subject are considered and significant
variations in performance are noted between them.
Subjects who speak more slowly achieve better
performance while the female subject achieves
inferior performance. It is noted that the smaller size
of the female subject’s head means that the sensors
are further from the articulators, and it is suggested
that this may explain the inferior performance. The
effect of gender and age on background cancellation
performance have not been assessed since this would
require a large number of recordings which are time
consuming and uncomfortable.
The approach to background cancellation
proposed here is based on the assumption that the
magnetic field experienced by the articulator sensors
is the same as that experienced by the reference
sensor. While this is expected to be true of the earth’s
magnetic field, it may not be the case for localised
sources of magnetic fields or close to objects which
distort the earth’s field. Further testing will be
required to assess whether the performance of the
background cancellation method is maintained in
other environments, although it may be noted that no
measures were taken to control the background field
in the trails reported here. Similarly, although the
method proposed should be capable of cancelling the
effects of alternating magnetic fields, this has not
been verified experimentally.
Developing a speech rehabilitation system which
is acceptable to patients who have undergone a
laryngectomy involves a number of challenges. The
ability of the PMA system to remove motion artefacts
is one important element of this but work is also
needed to improve the speech reconstruction
achieved, to assess usability and potentially improve
the comfort of the sensor frame and to prove the
safety and viability of long-term implantation of
magnets into the articulators. Work is underway to
address all of these challenges and the results will be
reported elsewhere.
6 CONCLUSIONS
Significant improvements on the silent speech
restoration were achieved when using the proposed
background cancellation scheme for removal of
motion artefact induced by subject’s head movement.
This is an important step in our objective of
developing a speech rehabilitation system for
A Wearable Silent Speech Interface based on Magnetic Sensors with Motion-Artefact Removal
61

everyday use by subjects who have undergone a
laryngectomy. Encouraged by the results obtained so
far, work is underway to further evaluate the
background cancellation scheme and to develop other
aspects of the system so that a speech rehabilitation
system can be offered to individuals who have
undergone a laryngectomy which they find preferable
to existing methods.
ACKNOWLEDGEMENTS
The report is an independent research funded by the
National Institute for Health Research (NIHR)’s
Invention for Innovation Programme (Grant Referen-
ce Number II-LB-0814-20007). The views stated are
those of the authors and not necessarily those of the
NHS, the NIHR or the Department of Health.
REFERENCES
Brumberg, J. S., Nieto-Castanon, A., Kennedy, P. R., and
Guenther, F. H. (2010). Brain-computer interfaces for
speech communication. Speech Communication,
52(4):367-379.
Cheah, L. A., Bai, J., Gonzalez, J. A., Ell, S. R., Gilbert, J.
M., Moore, R. K., and Green, P. D. (2015). A user-
centric design of permanent magnetic articulography
based assistive speech technology. In Proc.
BIOSIGNALS, pages 109-116, Lisbon, Portugal.
Denby, B., Schultz, T., Honda, K., Hueber, T., Gilbert, J.
M., and Brumberg, J. S. (2010). Silent speech
interfaces. Speech Communication, 52(4):270-287.
Danker, H., Wollbrück, D., Singer, S., Fuchs. M., Brähler,
B., and Meyer, A. (2010). Social withdrawal after
laryngectomy. Eur Arch Otorhinolaryngol, 267(4):593-
600.
Fagan, M. J., Ell, S. R., Gilbert, J. M., Sarrazin, E., and
Chapman, P. M. (2008). Development of a (silent)
speech recognition system for patients following
laryngectomy. Medical Engineering & Physics,
30(4):419-425.
Gilbert, J. M., Rybchenko, S. I., Hofe, R., Ell, S. R., Fagan,
M. J., Moore, R. K. and Green, P. D. (2010). Isolated
word recognition of silent speech using magnetic
implants and sensors. Medical Engineering & Physics,
32(10):1189-1197.
Gilbert J. M., Gonzalez J.A., Cheah L.A., Ell, S.R., Green
P., Moore R.K. and Holdsworth E., Restoring speech
following total removal of the larynx by a learned
transformation from sensor data to acoustics, The
Journal of the Acoustical Society of America 141,
EL307 (2017);
Gonzalez, J. A., Cheah, L. A., Gilbert, J. M., Bai, J., Ell, S.
R., Green, P. D., and Moore, R. K. (2016). A silent
speech system based on permanent magnet
articulography and direct synthesis. Computer Speech
& Language, 39:67-87
Gonzalez, J. A., Cheah, L. A., Green, P. D., Gilbert, J. M.,
Ell, S. R., Moore, R. K., and Holdsworth, E. (2017).
Evaluation of a silent speech interface based on
magnetic sensing and deep learning for a phonetically
rich vocabulary. In Proc. Interspeech, pages 3986-
3990, Stockholm, Sweden.
Herff, C., Heger, D., de Pesters, A., Telaar, D., Brunner, P.,
Schalk, G., and Schultz, T. (2015). Brain-to-text:
decoding spoken phrases from phone representations in
the brain. Frontiers in Neuroscience, 9(217).
Hofe, R., Ell, S. R., Fagan, M. J., Gilbert, J. M., Green, P.
D., Moore, R. K., and Rybchenko, S. I. (2013). Small-
vocabulary speech recognition using silent speech
interface based on magnetic sensing. Speech
Communication, 55(1):22-32.
Hueber, T., Benaroya, E.-L., Chollet, G., Denby, B.,
Dreyfus, G., and Stone, M. (2010). Development of a
silent speech interface driven by ultrasound and optical
images of the tongue and lips. Speech Communication,
52(4):288-300.
Kubichek, R. (1993). Mel-cepstral distance measure for
objective speech quality assessment. In Proc. IEEE
Pacific Rim Conference on Communications,
Computers and Signal Processing, pages 125–128,
Victoria, Canada.
Leonard, R. G. (1984). A database for speaker-independent
digit recognition. In Proc. ICASSP, pages 328-331, San
Diego, USA.
Such, O. (2007). Motion tolerance in wearable sensors– the
challenge of motion artifact. In Proc. IEEE EMBC,
pages 1542-1545, Lyon, France.
Schultz, T., and Wand, M. (2010). Modeling coarticulation
in EMG-based continuous speech recognition. Speech
Communication, 52(4):341-353.
Toda, T., Black, A. W., and Tokuda, K. (2008). Statistical
mapping between articulatory movements and acoustic
spectrum using a Gaussian mixture model. Speech
Communication, 50(3): 215-227.
Wand, M., Janke, M., and Schultz, T. (2014). Tackling
speaking mode varieties in EMG-based speech
ecognition. IEEE Transactions on Biomedical
Engineering, 61(10):2515-2526.
BIODEVICES 2018 - 11th International Conference on Biomedical Electronics and Devices
62
