
Towards Image Colorization with Random Forests
Helge Mohn, Mark Gaebelein, Ronny H
¨
ansch and Olaf Hellwich
Department of Computer Vision & Remote Sensing, Technische Universit
¨
at Berlin, Germany
Keywords:
Image Colorization, Random Forests, Regression.
Abstract:
Image colorization refers to the task of assigning color values to grayscale images. While previous work is
based on either user input or very large training data sets, the proposed method is fully automatic and based on
several orders of magnitude less training data. A Random Forest variation is tailored towards the regression
task of estimating the proper color values when presented with a grayscale image patch. A simple position
prior as well as scale invariance are included in order to improve the estimation results. The proposed approach
leads to satisfying results over various colorization tasks and compares favorably with state of the art based on
convolutional networks.
1 INTRODUCTION
From the first stable grayscale photo in history taken
in 1826 by Joseph N. Nipce, it took more than 60 ye-
ars until photography was available for the mass mar-
ket with the introduction of Kodak Nr. 1 in 1888. Co-
lor films, however, would not been available for anot-
her 50 years. Even after the release of color films by
Agfa and Kodak in 1936, grayscale films remained in
common use - for specific use cases even until today
(Mulligan and Wooters, 2015).
The century, when grayscale films have been the
only possibility to take photographs, leaves a tremen-
dous amount of pictures that would potentially bene-
fit from a robust and automatic colorization method.
However, possible applications go beyond grayscale
photography and include the colorization of night vi-
sion images or the production of pseudo-color images
to emphasize certain image structures such as structu-
ral damage in X-ray images.
Assigning plausible color values to a grayscale
image is a very sophisticated task and in general an ill-
posed problem since several colors in the real world
would result in the same grayscale image. Thus, prior
knowledge needs to be included, which helps to over-
come these ambiguities. Existing work for coloriza-
tion of grayscale images can be coarsely divided ba-
sed on the source of this prior knowledge.
Color embedding is an applicational area, which
is only loosely related to colorization. Correspon-
ding methods aim at saving the chrominance infor-
mation within a given grayscale image. One example
Figure 1: A Random Forest (RF) is trained with color ima-
ges that have a similar scenery as the query grayscale image.
The trained RF is able to determine a plausible color version
of a given grayscale image.
is (R. L. de Queiroz, 2006), which maps color values
to high-frequency textures of low visibility and adds
them to the grayscale image. As this process is re-
versible, it allows a color-to-grayscale conversion as
well as the “recolorization” of the obtained grayscale
image. However, it requires the availability of the cor-
responding color image so that the correct informa-
tion can be encoded into the grayscale image.
Another related field is the color transfer between
frames of a grayscale video. Certain keyframes are
colorized by a given method, e.g. manually, and the
given color values are subsequently transferred from
one frame of the video to the next. Corresponding
methods rely on matches between the image content
which can be established either manually as in (Kar-
thikeyani et al., 2007) or automatically as in (Irony
270
Mohn, H., Gaebelein, M., Hänsch, R. and Hellwich, O.
Towards Image Colorization with Random Forests.
DOI: 10.5220/0006570002700278
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 4: VISAPP, pages
270-278
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

et al., 2005). Due to the high similarity of adjacent
frames, this process provides highly accurate and re-
liable results. The question how the keyframe can be
colored is left unanswered, though.
A large group of colorization approaches involve a
human operator to exploit the vast knowledge of hu-
mans about objects in the real world. Users label a
few pixels within the image with corresponding co-
lors, which are then propagated to neighboring pixels
with similar intensity or textural patterns (A. Levin,
2004; Yatziv and Sapiro, 2006). The strength of these
approaches is certainly the user. On the one hand, hu-
mans are naturally well trained to match colors from
memory. On the other hand, colors will be selected
that are plausible on the object- or semantic level
instead of being based on low-level image informa-
tion such as texture or intensity alone. While these
approaches result in a visually pleasing color version,
the involvement of a human operator is time consu-
ming and hinders the application to a large amount of
images.
The last group consists of fully automatic appro-
aches which do not rely on any kind of manual in-
teraction. Instead, they are based on a set of trai-
ning images where additional to the grayscale images
the corresponding color information is known. These
methods derive a statistical model of the relationship
between intensity and textural patterns on the one side
and realistic colors on the other side. A recent exam-
ple is (R. Zhang, 2016) which is based on a Convoluti-
onal Network (ConvNet) which is trained on millions
of color images. The resulting network is able to co-
lorize general images and leads to visually pleasing
results.
While approaches such as (R. Zhang, 2016) are
based on millions of training images, our approach
operates with 10-20 images with the additional con-
straint that these images show a similar scene (see Fi-
gure 1). Due to the smaller amount of images, training
is very efficient and can be easily tailored to specific
scenes for various applications.
It applies a Random Forest (RF, (Breiman, 2001))
for the regression task of estimating plausible co-
lor information when provided with a local grays-
cale image patch. Color information is stored as 2D
histograms over chrominance values within the CIE
L*a*b* color space. Although the RF is trained on
only a few images of a similar scene, the usage of
local image patches as well as comparatively large
histograms would lead to a large memory footprint
if naively implemented. Two solutions are proposed
to cope with this problem. First, the color histograms
at the leafs are usually sparse and can thus be sto-
red in a memory-efficient manner. The second solu-
tion is based on the observation, that only tree crea-
tion needs to hold all training samples in the memory
(see Section 2.2), while tree training can be executed
on training batches (see Section 2.3). Instead of pre-
computing any kind of low-level features, the RF is
applied to the grayscale images directly. Correspon-
ding node tests compute several implicit features on
the fly (as for example in (Lepetit and Fua, 2006)),
which allow memory- and time-efficient processing
and are furthermore highly adaptable to the specific
colorization task. The training data is augmented with
training images at different scales to enable the forest
to map scaled textures to the correct colors. Obser-
ved color values are rebalanced similar to (R. Zhang,
2016) to account for the fact that pastel colors occur
more frequently than saturated colors.
The contribution of the proposed method is there-
fore five-fold:
• Decoupling tree creation and tree training to make
full use of a large amount of training samples du-
ring the estimation of the target variable.
• Implicit feature learning makes the computation
of predefined features obsolete.
• A sparse representation of the target variables le-
ads to memory-efficient RFs.
• Data augmentation increases the robustness of the
colorization regarding scale.
• Color rebalancing leads to realistically saturated
colors.
2 COLORIZATION ALGORITHM
2.1 Preprocessing
The proposed colorization method is based on a RF
(see Sections 2.2-2.4) as regression method. As su-
pervised approach, it relies on training data which -
additionally to the grayscale images - provides the
corresponding color information. While ground truth
data is difficult to obtain in many other supervised ma-
chine learning problems such as semantic segmenta-
tion, it basically comes for free for colorization tasks.
Any kind of color image can be transformed into a
grayscale version where the latter is used as training
data and the former as reference image. The propo-
sed method uses the CIE L*a*b* color space to per-
form regression, since it decouples luminance from
color information. Thus, training images are conver-
ted from RGB to CIE L*a*b*, where the luminance
L* is used as training input and the a*b* components
as target variable. During prediction, the luminance
Towards Image Colorization with Random Forests
271

is provided by the query image itself, which is then
fused by the estimated chrominance information to
obtain a color image.
During application, the RF aims at matching tex-
tural patterns in the query image to patterns observed
during training. However, images of similar scenes
and objects can differ largely in brightness and con-
trast due to different lighting conditions. In order to
normalize for lighting changes, histogram equaliza-
tion is performed as preprocessing step, which allows
a better comparability of different image patches.
Another change that commonly appears in opti-
cal imagery of close-range objects is a variation in
scale: While textural properties of an object might
differ greatly depending on the distance the image is
acquired, the color stays more or less constant. A cor-
rect colorization result can only be expected, if the
scale of the object within the query image is similar
to the scale within the training images. That is why
the training data is augmented with differently scaled
versions of the training images in order to achieve a
certain scale invariance.
2.2 Creation of a Random Forest
A RF is a set of binary decision trees, where each tree
is a hierarchical structure of split- and leaf-nodes. All
trees are created independently from each other and
should be as diverse as possible in order to benefit
from averaging their results during prediction. Diver-
sity is usually achieved by introducing randomization
processes during tree creation. A first source of rand-
omization is bagging, i.e. creating individual training
sets for each tree by randomly sampling data from the
training set.
During tree creation, split nodes are subsequently
added to a tree starting by the root node. Every split
node partitions the data that was propagated to this
node based on a simple binary test Ψ. Depending on
the outcome of this test, the corresponding subsets are
propagated further to the left or right child node. The
performance of each tree and thus of the whole fo-
rest depends strongly on the definition and selection
of reasonable node tests. Vanilla RF implementati-
ons usually simply split along one randomly selected
feature dimension, which in our application scenario
corresponds to test whether the luminance L of a cer-
tain pixel (x + ∆x, y + ∆y) within the patch at (x, y) is
higher or lower than a threshold T . Equation 1 shows
this first luminance feature (Ψ
1
), which basically de-
termines whether a pixel belongs to a bright or a dark
object. This work additionally applies node test va-
riants that are more tailored towards the analysis of
images (as for example proposed in (Lepetit and Fua,
Figure 2: From left to right: Part of a grayscale image; Ex-
ample patches taken from marked pixel positions; Lumi-
nance feature Ψ
1
; Luminance difference feature Ψ
2
. The
two rows show a homogeneous patch at the top and a textu-
red patch at the bottom.
2006)). Equation 2 shows a second luminance feature
Ψ
2
which compares the luminance difference of two
pixels (x +∆x
i
, y +∆y
i
), i ∈ {1, 2} located in a patch at
(x, y) to a threshold T . This feature is an approxima-
tion of the local gradient and thus analyses the local
texture. Figure 2 visualizes these two features.
Ψ
1
: L(x + ∆x, y + ∆y) ≥ T (1)
Ψ
2
: L(x + ∆x
1
, y + ∆y
1
) − L(x + ∆x
2
, y + ∆y
2
) ≥ T
(2)
A second group of node tests aims at including a
prior model on the positions that different colors take
within an image. Depending on the application sce-
nario, i.e. the nature of the query image, some colors
are more likely to occur at certain image positions.
Simple examples are landscape images, which often
show blue pixels at the top (i.e. the sky) or portraits
that show pixels of skin color rather in the center.
Three different node tests are used to enable the
RF to learn the color prior from the training data. The
first variant tests whether the pixel coordinates of a
patch are within a circular area, whose position and
size are randomly determined. The other two variants
simply split either on the x- or on the y-coordinate of
the patch position (very similar to test type Ψ
1
) and
thus divide the image into axis-aligned blocks.
Nearly all of the used node tests involve the com-
parison of a scalar value (either luminance or pixel
coordinate) with a threshold. There are many ways to
define this threshold ranging from random sampling
to a completely optimized selection. We define the
threshold as the median of the projected values as this
splits the data into two equally large parts (if possi-
ble). This leads to trees that are most balanced. Thus,
they apply a maximum amount of node tests to the
data and achieve a fine-grained partition of the feature
space. However, this threshold definition depends on
the data only and is independent of the reference data.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
272
In order to optimize the node tests with respect to
the target variable, each newly created split node ge-
nerates multiple different test candidates during tree
creation. These different test instances are created by
randomly sampling test parameters, e.g. which of the
five different test types is applied, which pixel positi-
ons are to be used, etc. Each of these tests splits the
local data into two subsets. Based on this split, the
drop of impurity (Eq. 3) is computed which is based
on the Gini index (Eq. 4).
Γ = I
node
− (P
le f t
· I
le f t
+ P
right
· I
right
) (3)
I
n
= 1 −
∑
a,b
p
n
(a, b)
2
(4)
where p
n
is the distribution of colors represented as
2D histogram over the a*b* values of the CIE L*a*b*
color space at node n.
The test leading to the split with the largest drop
of impurity is selected and the samples are propagated
to the child nodes accordingly.
The recursive splitting stops, if one of the follo-
wing criteria is met:
• The maximum tree height is reached.
• The minimum number of samples within a node
falls below a threshold.
• The largest drop of impurity of all generated split
candidates is below a threshold (i.e. close to zero).
2.3 Training of a Random Forest
As colorization is an inherently ill-posed problem it
benefits from the virtually unlimited amount of trai-
ning data. The creation of the random decision trees,
however, relies on the availability of all data sam-
ples in order to perform node test optimization (see
Section 2.2). Thus, only a certain fraction of available
training samples is used to define the tree structure.
Once the trees are created, they have to be trained, i.e.
an estimate of the target variable has to be assigned
to the corresponding leaf nodes. This process does
not require all samples to be present at once. Thus, to
train the trees all samples from all training images are
used.
Training patches are propagated through the tree
based on the node tests as defined during tree creation.
Once a patch reaches a leaf node, it is used to update
the estimate of the target variable, i.e. the correspon-
ding color. To this purpose the color information is
quantized and stored in two-dimensional histograms
representing the local posterior of the a*b* part of the
CIE L*a*b* color space. Due to the nature of the de-
cision trees, these histograms tend to be very sparse
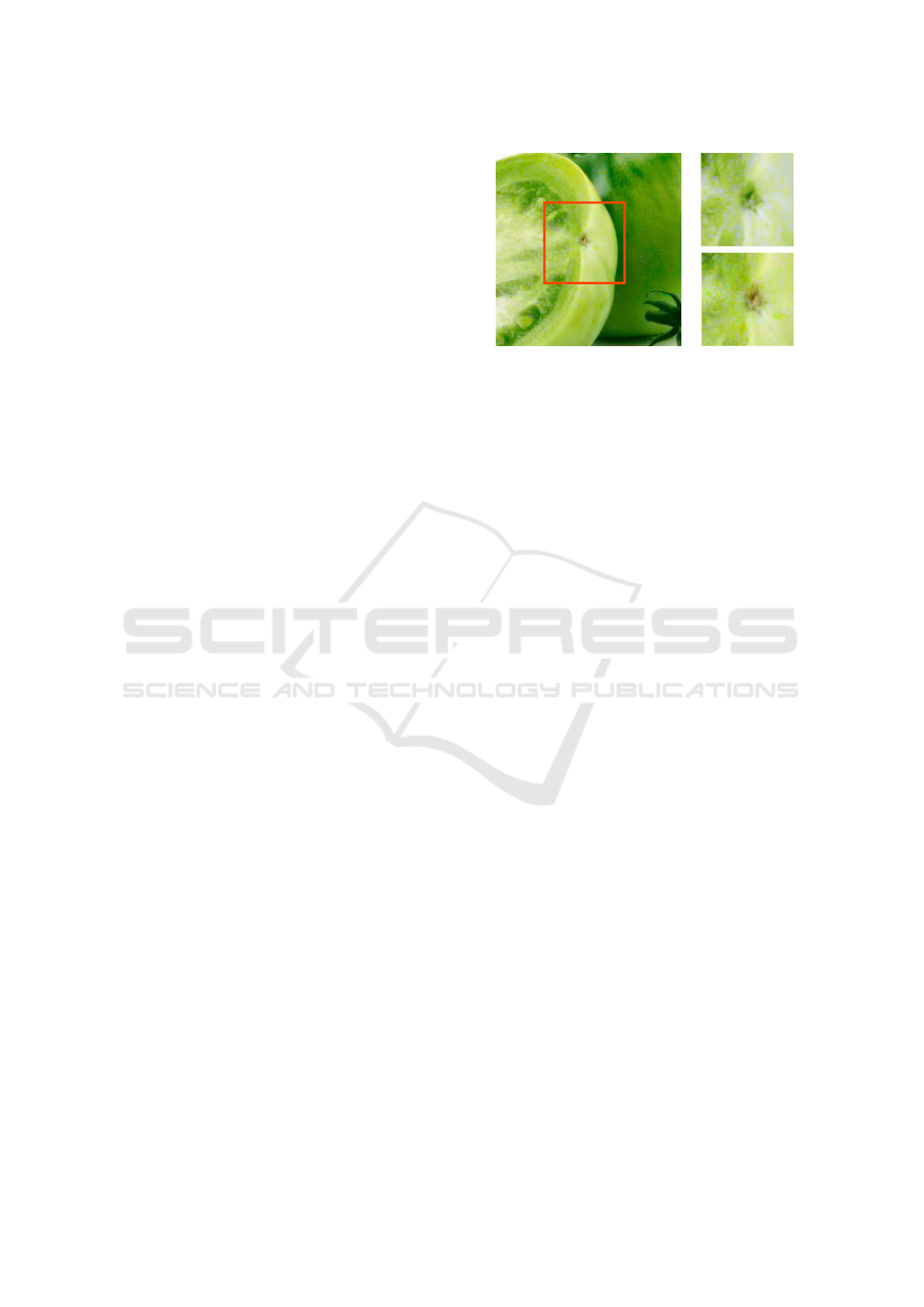
Figure 3: Histogram normalization: Left: Ground truth
image (a green tomato); Right: Colorization results. Wit-
hout normalization (top) the tip of the tomato is falsely co-
lored in green, while it is correctly colored brownish if all
histograms are normalized according to the chrominance
occurrence in the training data (bottom).
and can thus be saved in an efficient manner in order
to minimize the memory footprint of the trees.
At the end of the training process all histo-
grams are normalized according to the hue occurrence
within the training data. This class rebalancing is a
typical processing step to ensure that classes that are
underrepresented within the training data are treated
with similar importance as frequent classes. This is
especially important in colorization tasks, since rat-
her weak colors appear significantly more often than
strongly saturated colors. Colors with a high occur-
rence in the training images would then dominate nu-
merous hue histograms.
Figure 3 shows an input image on the left. The top
of the right side shows a detail of the colorization re-
sult without normalization after the training process,
while the bottom right illustrates the colorization re-
sult with normalization. In this example green is the
dominant color which clearly dominates brown. Wit-
hout proper normalization the brown tip of the tomato
is falsely colorized in green. After performing a nor-
malization the tomato point is correctly colorized in
brown.
2.4 RF Application
During prediction, patches around all pixels of the
query image are propagated through the trees in the
same way as during tree training. A patch x will re-
ach exactly one leaf n
t
in each individual tree t. Let
p
n
t
(a, b|x) be the a*b* histogram of the particular leaf
n
t
in tree t that had been reached by patch x. The
a*b*-histograms of these leafs are averaged and the
maximal value of the resulting histogram is assigned
as chrominance estimate ˆa*
ˆ
b* to the corresponding
pixel:
Towards Image Colorization with Random Forests
273
ˆa
∗
ˆ
b
∗
= argmax
a,b
p(a, b|x) (5)
p(a, b|x) =
1
N
N
∑
t=1
p
n
t
(a, b|x) (6)
The estimated ˆa*
ˆ
b*-values together with the
grayscale value of the query image provide the com-
plete CIE L*a*b*-vector which is then converted to
the RGB color space and saved at the corresponding
image position.
3 EVALUATION
3.1 Data
The proposed method assumes a small database of
images similar to the query image (see Figure 1). The
difficulty of the colorization task depends on the con-
tent of the query images and how well their statistics
match the statistics of the training data. These two
factors are somewhat connected: If scenes have a li-
mited color variation and a clear relationship between
texture and color, it is more likely to sufficiently re-
present them with a few training images. If scene
content is diverse and similar textures are colored dif-
ferently, the training data might not suffice to extract
all necessary information and even if, the estimated
mapping will be ambiguous. In order to evaluate the
performance without having a selection bias towards
too easy (or too hard) image types, we collected data
for ten different and diverse categories, namely Be-
ach (see for example Figure 10), Sanssouci, Redbrick-
House, GarbageCan, PolarLight, Airport, Train, Gra-
pes (see for example Figure 8), and Forest (see for
example Figure 12). These categories include man-
made as well as natural objects, homogeneous as well
as strongly textured regions, and cover a wide range
of color distributions.
3.2 Random Forest Statistics
The colorization results depend solely on the perfor-
mance of the applied Random Forest since no other
type of processing (e.g. label smoothing as post pro-
cessing) is involved.
That is why this section briefly analyzes an exam-
ple instance of a Random Forest that was trained on
images of the category Sanssouci with an image pa-
tch size of 5 × 5 pixel. It consists of four trees that
have been grown until maximal height. A node nee-
ded to contain at least 10 samples to continue split-
ting. In this case, 150 possible split candidates are
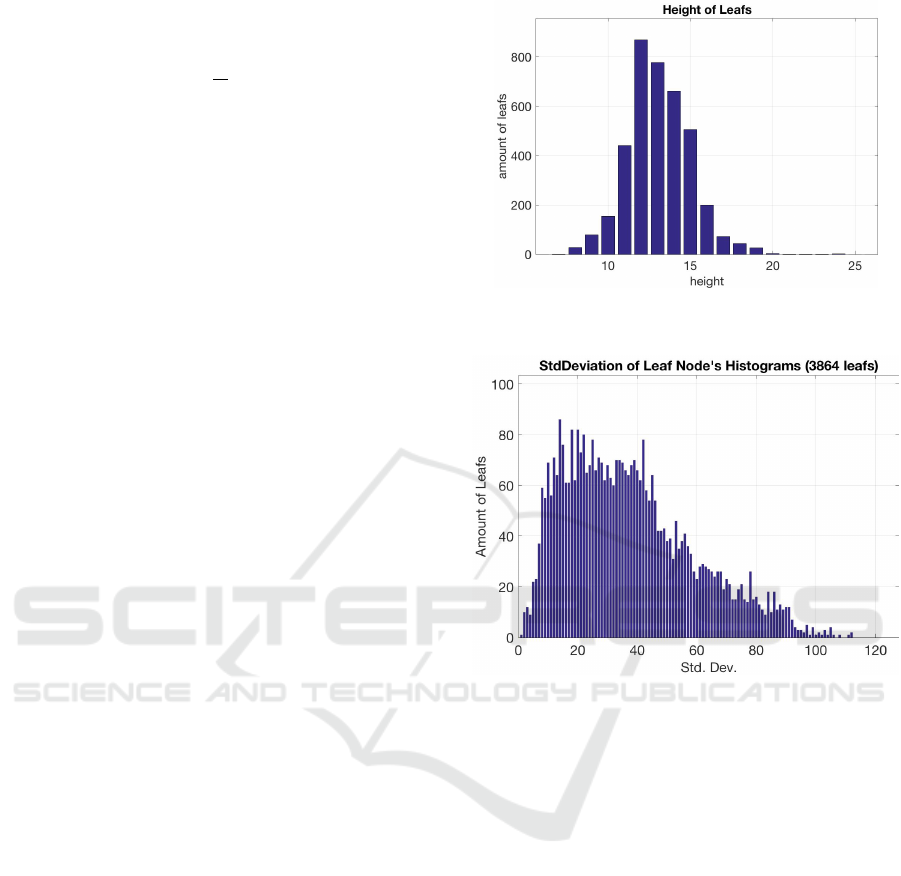
Figure 4: Amount of leafs at different tree levels within a
tree of the forest.
Figure 5: Amount of leafs with different levels of pureness
measured as average sample distance to sample mean.
created randomly and evaluated based on the drop of
impurity (see Equation 3). If the drop of impurity of
the best split was below 10
−4
or other stopping cri-
teria became valid, the recursive partitioning stopped.
In this case, a leaf node is created containing a 2D
histogram over possible a*b* values discretized into
a 32 × 32 grid.
Figure 4 shows the number of leafs existing at a
specific tree height within a tree of the forest. The
longest path within the forest only reached a height
of 24. Most paths end before height 16, which shows
that the trees are fully grown. Increasing the maximal
tree height will not change the tree topology unless
they are induced with a larger set of training samples.
Each internal node within a tree aims at dividing
the data in a way such that the corresponding child
nodes are as “pure” as possible, i.e. contain samples
mostly having similar colors. One way to measure the
“pureness” of a node in a regression tree is to compute
the average distance of the samples to their mean va-
lue. Figure 5 shows the number of leafs with different
“pureness” levels. As can be seen, most of the leafs
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
274

Figure 6: Hue histograms of different leaf examples.
contain samples that concentrate within a small re-
gion around the mean value (e.g. less than 40), while
only a few leafs have a very diverse set of colors (e.g.
average distance more than 80).
Figure 6 shows the estimated histograms of three
different leaf examples with different impurities (see
Equation 4). As can be seen, even for leafs with high
impurity the colors have been well clustered by the
forest and stay within close proximity to each other.
Instead of acting as a pure black-box system,
Random Forests allow some insights into their deci-
sion making process. One example is the frequency
how often certain node tests have been performed. Fi-
gure 7 shows the selection frequency of the implicitly
calculated features (see Section 2.2). The luminance
difference of pixels inside a patch (test type Ψ
2
) has
been used most often, followed by the luminance va-
Figure 7: Frequency how often a certain node test is perfor-
med within a tree of the RF.
lue itself (test type Ψ
1
). While the latter distinguishes
between dark and bright patches, the former analy-
ses the local texture by approximating the luminance
gradient. As spatial prior information the circular re-
gion prior (see Section 2.2) is preferred over the x-y-
position.
3.3 Results
Image colorization is an ill-posed problem: The same
texture might have very different colors. One example
is the color of the hair of a person, which can - taken
artificial hair colors into account - be practically any-
thing despite having very similar textures. On the ot-
her hand, the goal of image colorization is often not to
assign the “correct” color (i.e. the color the object had
when the grayscale picture was taken), but to assign
a realistic color (i.e. the color objects of this category
usually have). Thus, achieving a visually pleasing re-
sult is often more important than a “correct” result or
- in other words - a “wrong” result can still be accep-
table for a human observer.
This is illustrated in Figure 8, which shows the co-
lorization result of the proposed method on the right
and the result of the reference method (R. Zhang,
Figure 8: Rather than assigning a correct color, assigning
a realistic color is important. From left to right: Original
image; Colorized by (R. Zhang, 2016); Colorized by pro-
posed method.
Towards Image Colorization with Random Forests
275

2016) in the center. Both results are not correct
in a numerical sense: The proposed method co-
lors the blurry background in blueish colors giving
it a flowerbed-like look, while it is supposed to be
green. The reference method colors the grapes in a
greenish-brownish color. Nevertheless, both results
look equally plausible and visually pleasing.
However, the subjective quality of a colorization
result is hard to measure. Thus, we rely on objective
measurements that are based on comparing the esti-
mated color image to the ground truth. In particular,
we state the accuracy A
θ
(E) of the estimation E with
respect to a reference image R as
A
θ
(E) =
∑
(x,y)∈E
acc
θ
(E(x, y), R(x, y)) (7)
acc
θ
(e, r) =
1 if
e
a
∗
− r
a
∗
e
b
∗
− r
b
∗
2
< θ
0 otherwise.
(8)
This measure simply counts how many pixels have a
color difference smaller than a certain threshold θ.
Even within a category, the image content can
vary largely, e.g. day vs. night images of a building
or summer vs. winter images of a landscape. That is
why the training images within a category are divided
into three groups: Similar to the query, dissimilar to
the query, and mixed. On each of these three groups
a separate Random Forest is trained and evaluated on
the common query images.
The performance is shown in Figure 9 for a dis-
tance threshold of 20 and 40, respectively. The top
of Figure 9 shows that on average more than 50% of
all pixels of all query images in all categories are cor-
rectly classified (i.e. have a color difference smaller
than 20 to the reference image), if the training data-
base is similar to the query. If the training database
is dissimilar to the query, this value drops by roughly
10%.
The last column shows the performance of the re-
ference method proposed by (R. Zhang, 2016). It
should be noted that this method is based on training
a deep convolutional network on millions of images.
This tremendous effort during training allows the net-
work to colorize general images during prediction.
Our method, on the other side, is trained on a rather
small database of training images which have to be
of the same category as the query image. The results
of the deep network are slightly worse than the per-
formance of the Random Forest if the training images
are similar to the query. Thus, the proposed frame-
work presents an alternative to the deep network in
the case where training on many images is either not
possible or not desired.
The bottom of Figure 9 shows the same statistics
for a threshold of 40. The accuracy of all variants go
Figure 9: Accuracy A
θ
(Top: θ = 20; Bottom: θ = 40; see
Equation 7) of the proposed approach (first three columns)
trained on different datasets as well as of the reference met-
hod (last column).
up to roughly 80% indicating that additional 30% of
pixels are classified with a similar color to the origi-
nal.
Figure 10 and Figure 12 show two more coloriza-
tion results additionally to those in Figure 8. The top
row shows the original image on the left and the cor-
responding grayscale image on the right. The second
row shows the colorization result obtained by the pro-
posed method with the corresponding error map on
the right where black means a correct colorization and
white corresponds to the maximum Euclidean dis-
tance between estimated and reference chrominance.
The third row shows the colorization result obtained
by the reference method (R. Zhang, 2016) together
with the corresponding error map.
Figure 11 shows the images that have been used
to train the Random Forest that has colored the image
in Figure 10. While showing a very similar scene,
the actual image content is general enough (given
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
276
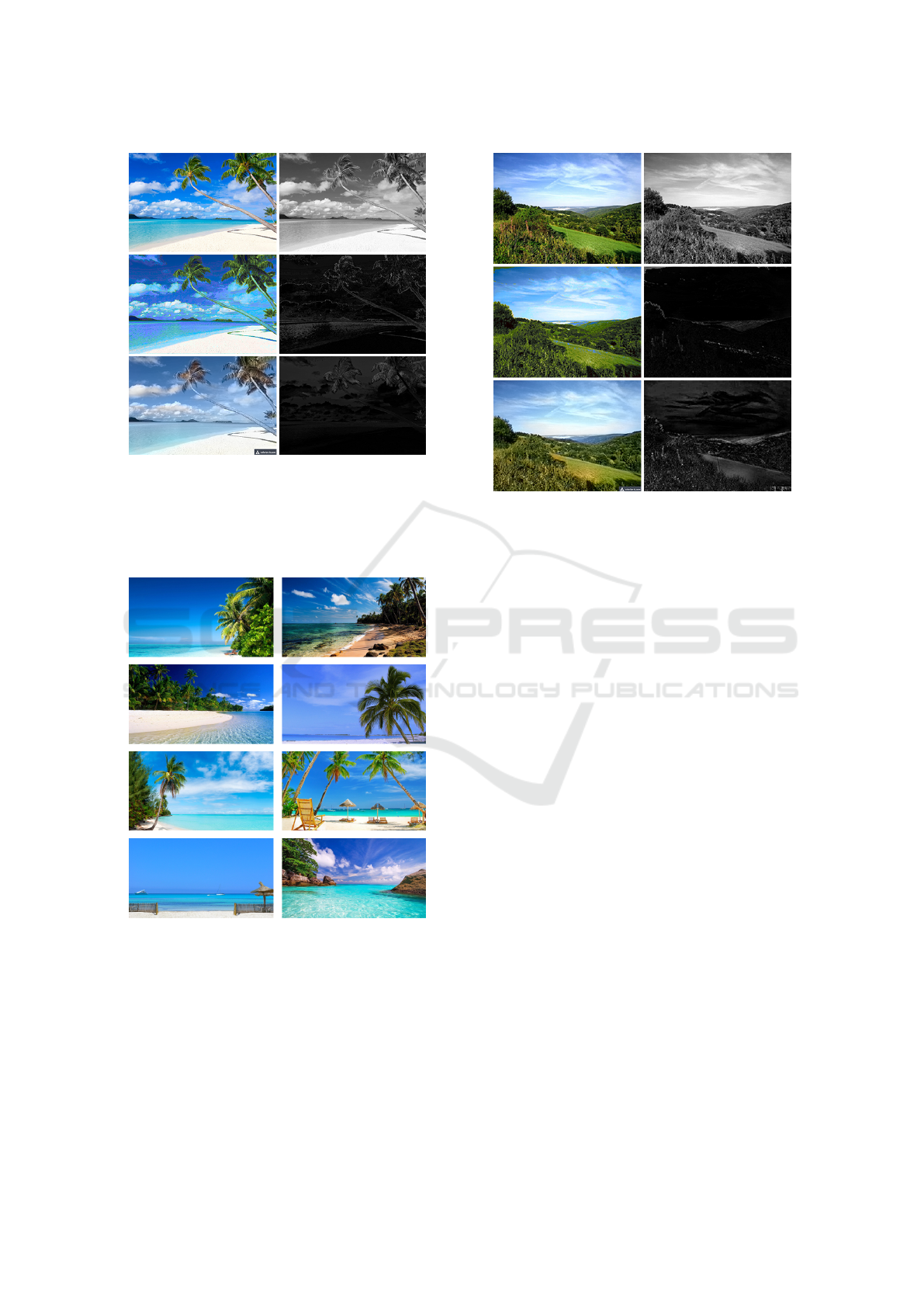
Figure 10: Results of example image from the Beach ca-
tegory; The top row shows the original color image on the
left as well as the grayscale version on the right. The second
and third row show on the left the colorization results of the
proposed and reference method, respectively, as well as the
corresponding error maps on the right.
Figure 11: Training images for result in Figure 10.
the category) to easily find colored examples. The
proposed approach achieves an accuracy of A
20
=
53.63% while the reference method obtained A
20
=
50.03% The canopy of the palm tree is very well re-
constructed by the proposed method while it stays
greyish-brownish in the result of the reference met-
hod. The result of the deep learning approach has less
saturation in general but looks slightly more realistic.
The stem of the tree is not very well reconstructed by
Figure 12: Results of example image from the Forest ca-
tegory; The top row shows the original color image on the
left as well as the grayscale version on the right. The second
and third row show on the left the colorization results of the
proposed and the reference method, respectively, as well as
the corresponding error maps on the right.
both methods.
Figure 12 shows the results of the colorization of
a forest image. While the deep learning approach
reaches a colorization correctness of A
20
= 91.98%,
the proposed method achieves a slightly worse accu-
racy of A
20
= 90.04%. Although the proposed method
achieves a higher accuracy over the grass area within
the image, both colorization results are very plausible.
4 CONCLUSIONS
Instead of aiming at a general purpose colorization
tool, the proposed method focuses on the use case
where a small but specific database of training ima-
ges is available for query images of a certain category.
This keeps training time at a minimum and allows to
lessen ambiguities, which otherwise frequently occur
in colorization tasks.
The proposed method is based on a Random Fo-
rest, which analyses the local structure of a grayscale
patch and employs a spatial color prior model, which
is learnt from training data. The color information
is saved within the terminal nodes as 2D histograms
over a*b* values of the CIE L*a*b* color space.
Experiments are conducted over a range of dif-
ferent image categories including several man-made
and natural scenes. The results indicate that the pro-
Towards Image Colorization with Random Forests
277

posed method is successfully able to colorize grays-
cale images if a suitable database of training images
is available. The obtained colorization results are on
par with a reference method which is based on a deep
convolutional network trained on millions of images
and used for general colorization tasks.
Future work will focus on weakening the require-
ments on the specificity of the training images. More
diverse images allow in principle the colorization of a
broader range of query images on the cost of a more
time- and memory-expensive training phase. This re-
quires the deployment of more and deeper trees.
A further direction is the post-processing of the
obtained raw colors. A conditional random field de-
fined over the image space would allow to achieve a
local color consistency as well as taking more global
image characteristics into account.
REFERENCES
A. Levin, D. Lischinski, Y. W. (2004). Colorization using
optimization. ACM Transactions on Graphics (TOG)
- Proceedings of ACM SIGGRAPH.
Breiman, L. (2001). Random forests. Statistics Department
University of California Berkeley, CA 94720.
Irony, R., Cohen-Or, D., and Lischinski, D. (2005). Colo-
rization by example. In Eurographics Symposium on
Rendering.
Karthikeyani, V., Duraiswamy, D. K., and Kamalakkannan,
P. (2007). Conversion of gray-scale image to color
image with and without texture synthesis. Internatio-
nal Journal of Computer Science and Network Secu-
rity, 7(4).
Lepetit, V. and Fua, P. (2006). Keypoint recognition using
randomized trees. IEEE Transactions on Pattern Ana-
lysis and Machine Intelligence, 28(9):1465–1479.
Mulligan, T. and Wooters, D. (2015). Geschichte der Foto-
grafie. Von 1839 bis heute. TASCHEN.
R. L. de Queiroz, K. M. B. (2006). Color to gray and back:
Color embedding into textured gray images. IEEE
Transactions on Image Processing, 15(6).
R. Zhang, P. Isola, A. A. E. (2016). Colorful image colori-
zation. In ECCV 2016, volume III, pages 649–666.
Yatziv, L. and Sapiro, G. (2006). Fast image and video co-
lorization using chrominance blending. IEEE Tran-
sactions on Image Processing, 15(5).
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
278
