
Unfolding Ensemble Training Sets for Improved Support Vector
Decoders in Energy Management
Joerg Bremer and Sebastian Lehnhoff
Department of Computing Science, University of Oldenburg, Uhlhornsweg, Oldenburg, Germany
R&D Division Energy, OFFIS – Institute for Information Technology, Escherweg, Oldenburg, Germany
Keywords:
Flexibility Modeling, Folded Distributions, Simulated Annealing, Predictive Scheduling.
Abstract:
Smart grid control demands delegation of liabilities to distributed, rather small energy resources in contrast to
todays large control power units. Distributed energy scheduling constitutes a complex task for optimization
algorithms regarding the underlying high-dimensional, multimodal and nonlinear problem structure. Addi-
tionally, the necessity for abstraction from individual capabilities is given while integrating energy units into
a general optimization model. For predictive scheduling with high penetration of renewable energy resources,
agent-based approaches using classifier-based decoders for modeling individual flexibilities have shown good
performance. On the other hand, such decoder-based methods are currently designed for single entities and
not able to cope with ensembles of energy resources. Combining training sets randomly sampled from individ-
ually modeled energy units, results in folded distributions with unfavorable properties for training a decoder.
Nevertheless, this happens to be a quite frequent use case, e. g. when a hotel, a small business, a school or
similar with an ensemble of co-generation, heat pump, solar power, and controllable consumers wants to take
part in decentralized predictive scheduling. We use a Simulated Annealing approach to correct the unsuitable
distribution of instances in the aggregated ensemble training set prior to deriving a flexibility model. Feasibil-
ity is ensured by integrating individual flexibility models of the respective energy units as boundary penalty
while the mutation drives instances from the training set through the feasible region of the energy ensemble.
Applicability is demonstrated by several simulations using established models for energy unit simulation.
1 INTRODUCTION
Across Europe, especially in Germany where a fi-
nancial security of guaranteed feed-in prices is given
since 1991, the share of distributed energy resources
(DER) is rapidly growing. Following the goal de-
fined by the European Commission (European Par-
liament & Council, 2009), a concept for integration
into electricity markets is needed (Abarrategui et al.,
2009; Nieße et al., 2012) leading in turn to a need for
grouping small energy resources due to their rather
low potential and flexibility and for predictive plan-
ning. A well-known concept for aggregating DER
to a jointly controllable entity is known as virtual
power plant (VPP). Apart from controlling distributed
electricity generation, e. g. combined heat and power
(CHP), photovoltaic or wind power, controllable con-
sumption like shiftable loads, heat pumps or air con-
ditioning might also be included for planning active
power schedules. Battery storages are discussed to
complement such groups of DER.
The general optimization problem to be solved for
scheduling in a VPP is known as predictive schedul-
ing (day-ahead based on predicted conditions) as
approach for the unit commitment problem (Padhy,
2004). Under given constraints, energy unit’s opera-
tion modes have to be chosen for each unit such that
the joint operation meets some desired load profile for
a given planning horizon.
In order to choose an appropriate schedule of op-
eration modes for each participating DER, the algo-
rithm must know for each DER, which schedules are
actually operable and which are not. Depending on
the type of DER, different constraints restrict possible
operations. The information about individual local
feasibility of schedules has to be modeled appropri-
ately in (distributed) optimization scenarios, in order
to allow unit independent algorithm development. For
this purpose, meta-models of constrained spaces of
operable schedules have been shown indispensable as
a means for independently modeling constraints and
feasible regions of flexibility. Each energy unit has its
322
Bremer, J. and Lehnhoff, S.
Unfolding Ensemble Training Sets for Improved Support Vector Decoders in Energy Management.
DOI: 10.5220/0006543503220329
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 2, pages 322-329
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
0 10 20 30 40
50 60
70 80 90
1
2
3
4
time of day / no. of 15 minute intervall
power / kW
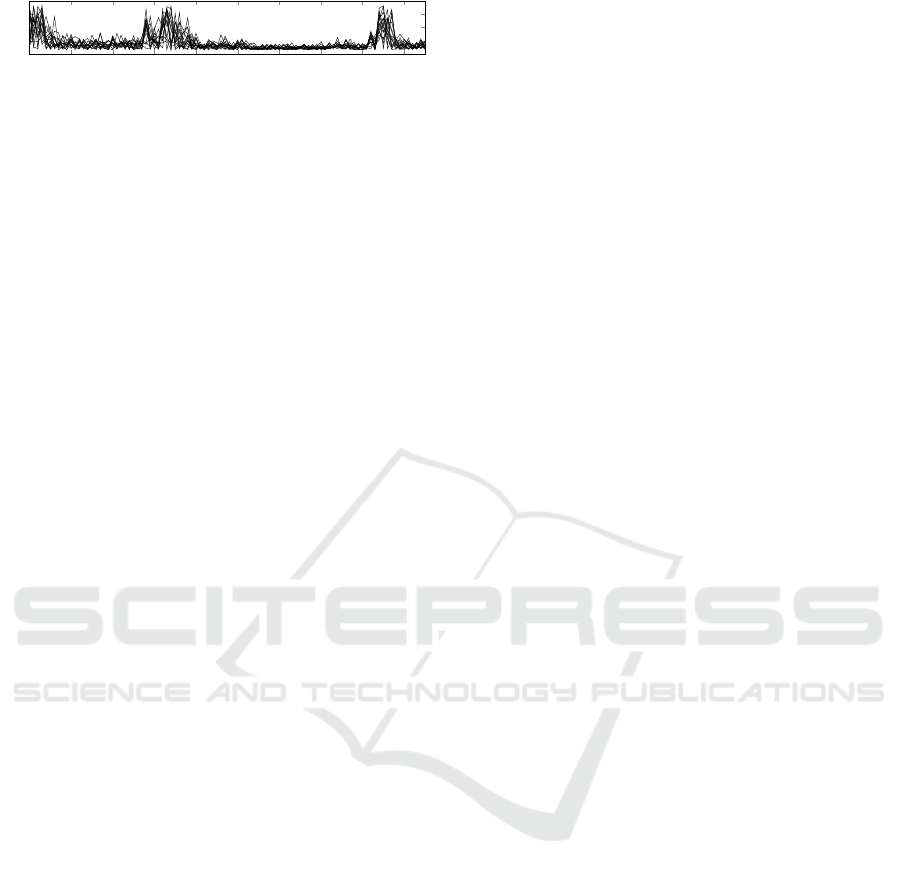
Figure 1: Example for a training set of schedules for a co-
generation plant. A state-of-charge of 50% at night and an
increased thermal demand for showering in the morning and
dish washing in the evening result in higher flexibilities dur-
ing these periods.
own individual flexibility – i. e. the set of schedules
that might be operated without violating any tech-
nical operational constraint – based on the capabili-
ties of the unit, operation conditions (weather, etc.),
cost restrictions and so forth. Modeling flexibility
independently from specific energy units demands a
means for meta-modeling that allows model indepen-
dent access to feasibility information. (Bremer et al.,
2011) introduced a support vector based model that
captures individual feasible regions from training sets
of operable example schedules. Figure 1 shows an
example training set for a co-generation plant. An ex-
tend use case for systematic solution repair with these
models has been introduced in (Bremer and Sonnen-
schein, 2013a). Agent-based approaches can derive a
so called support vector decoder automatically from
the surrogate model and use it as a means for sys-
tematically generating feasible solutions without do-
main knowledge on the (possible, situational) opera-
tions of the controlled energy resource. In general,
the idea works in two successive stages – a decoder
training phase and the actual planning phase. First a
training set of feasible schedules is generated for each
energy unit using a situationally parametrized simu-
lation model of the energy unit. Then, the flexibility
model is derived from the training set. During the suc-
ceeding load planning phase, these decoders may be
used by an optimization algorithm that determines the
optimal partition of a given active power target sched-
ule into schedules for each single unit. The decoder
automatically generates feasible solutions. With this
approach as abstraction layer, the solver does not need
any domain knowledge about the energy units, their
individual constraints, or possible operation.
An example for a recently developed agent ap-
proach for fully decentralized predictive scheduling
is given by the combinatorial heuristics for distributed
agents (COHDA). In COHDA (Hinrichs, 2014) each
agent locally decides on feasible schedules for the
represented unit with a decoder, but, as soon as an
agent has to represent a local ensemble of energy
units instead of a single device, a problem arises be-
cause usually only flexibility models of single units
are available and a concept for statistically sound ag-
gregating a set of flexibility models is missing so far
(Bremer and Lehnhoff, 2017). Generating a single
decoder for handling all constraints and feasible op-
erations of the whole ensemble is hardly possible due
to statistical problems when combining training sets
from individually sampled flexibility models. Due to
the folded densities only a very small portion from
the interior of the feasible region (the dense region)
is captured by the machine learning process. But, a
combined training set is needed. The same holds true
for any other centralized or agent-based orchestration.
In this paper, an approach is presented that intro-
duces an intermediate density optimization step into
the training process. Schedules from individual train-
ing sets modeling individual flexibilities are aggre-
gated to a joint training set. The skewed, aggregated
training set is then unfolded by Simulated Annealing.
The feasibility of the joint training set is maintained
by using the individual feasibility models.
2 PREDICTIVE SCHEDULING
AND FLEXIBILITY MODELING
Virtual power plants are a means for aggregating
and controlling DER (Awerbuch and Preston, 1997).
In scenarios with independently operated units, self-
organizing algorithms are required also for coordina-
tion. In general, distributed control schemes based
on multi-agent systems are considered advantageous
for large-scale problems as expected in future smart
grids due to the large number of distributed energy
resources that take over control tasks from large-scale
central power plants (Nieße et al., 2012). Some recent
implementations are (Hinrichs et al., 2013; Ramchurn
et al., 2011; Kamphuis et al., 2007).
One of the crucial challenges in operating a VPP
arises from the complexity of the scheduling task due
to the large amount of (small) energy units in the dis-
tribution grid (McArthur et al., 2007). In the fol-
lowing, we consider predictive scheduling, where the
goal is to select exactly one schedule x
x
x
i
for each con-
trolled energy unit U
i
from a search space F
i
of feasi-
ble schedules specific to the possible operations and
technical constraints of unit U
i
and with respect to
a future planning horizon, such that a global objec-
tive function (e. g. resembling a target power profile)
is optimized by the sum of individual contributions. A
basic formulation of the scheduling problem is given
by
δ
˜
m
ÿ
i“1
x
x
x
i
, ζ
ζ
ζ
¸
Ñ min; s. t. x
x
x
i
P F
i
@U
i
P U. (1)
In equation (1) δ denotes an (in general) arbi-
trary distance measure for evaluating the difference
Unfolding Ensemble Training Sets for Improved Support Vector Decoders in Energy Management
323

R
d
S
H
Φ : X Ñ H
Φ
´1
pSq
(a)
H
pkq
R
d
x
x
x
ˆ
Ψ
x
˜
Ψ
x
x
x
x
˚
(b)
Figure 2: General support vector decoder scheme for solu-
tion repair and constraint handling (Bremer and Lehnhoff,
2017).
between the aggregated schedule of the group and the
desired target schedule ζ
ζ
ζ. W. l. o. g. we assume that
the Euclidean distance is used.
To each energy unit U
i
exactly one schedule x
x
x
i
has to be assigned. The desired target schedule is
given by ζ
ζ
ζ. Solving this problem without unit inde-
pendent constraint handling leads to specific imple-
mentations that are not suitable for handling changes
in VPP composition or unit setup and thus leads to
enlarged integration cost for new units.
Flexibility modeling can be understood as the
task of modeling constraints for energy units. Apart
from global VPP constraints, constraints often appear
within single energy components; affecting the local
decision making. Popular methods treat constraints
or aggregations of constraints as separate objectives
or penalties, leading to a transformation into a (un-
constrained) many-objective problem (Kramer, 2010;
Smith and Coit, 1997).
For optimization approaches in smart grid scenar-
ios, black-box models capable of abstracting from the
intrinsic model have proved useful (Pinto et al., 2017;
Gieseke and Kramer, 2013; Schiendorfer et al., 2014;
Bremer and Sonnenschein, 2013a). The units do not
need to be known at compile time. A powerful, yet
flexible way of constraint-handling is the use of a de-
coder that gives a search algorithm hints on where to
look for schedules satisfying local hard constraints
(Bremer and Sonnenschein, 2013b; Coello Coello,
2002).
Thus, a decoder allows for a targeted search by.
It imposing a relationship between a decoder solution
and a feasible solution (Coello Coello, 2002).
A schedule of an energy unit can be seen as a real
valued vector x
x
x “ px
1
, . . . , x
d
q P F
i
Ă R
d
with each el-
ement x
j
denoting mean electrical power during the
jth time interval. F
i
denotes the specific feasible sub-
set of schedules that may be operated by energy unit
U
i
without violating any technical constraints.
Fig. 2 shows the idea of a support vector decoder
starting with a set of feasible example schedules de-
rived from a simulation model of the respective en-
ergy unit and using it as a stencil for the region that
contains just feasible schedules.
A training set X containing only valid schedules,
can e. g. be derived after a sampling approach from
(Bremer and Sonnenschein, 2013c). From such a
training set, a support vector data description (SVDD)
can derive a geometrical description of the sub-space
that contains the given data (Tax and Duin, 2004); in
our case: the set of feasible schedules. As a prere-
quisite, the samples from the training set have to be
distributed appropriately across the feasible region.
Given a set of data samples, the enclosing envelope
(a model of the feasible region and thus of the flexi-
bility) can be derived as follows: After mapping the
data to a high dimensional feature space, the small-
est enclosing ball in this feature space is determined.
When mapping back the ball to data space, it forms a
set of contours enclosing the given data sample.
This task is achieved by determining a mapping
Φ : X Ă F Ă R
d
Ñ H ; x ÞÑ Φpxq such that all data
from a training set X is mapped to a minimal hyper-
sphere in H . The minimal sphere with radius R and
center a in H that encloses tΦpx
x
x
i
qu
N
can be derived
from minimizing }Φpx
x
x
i
q ´ a}
2
ď R
2
` ξ
i
with slack
variables ξ
i
ě 0 for a smoother ball.
After some relaxations one gets two main out-
comes: the center a “
ř
i
β
i
Φpx
x
x
i
q (with β
β
β weight-
ing the impact of different schedules) of the minimal
sphere in terms of an expansion into H and a function
that allows to determine the distance of the image of
an arbitrary point from a P H , calculated in R
d
is de-
rived: R
2
px
x
xq “ 1´2
ř
i
β
i
kpx
x
x
i
, x
x
xq`
ř
i, j
β
i
β
j
kpx
x
x
i
, x
x
x
j
q,
with a kernel k that substitutes dot products in Hilbert
space. Because all support vectors are mapped onto
the surface of the sphere, the sphere radius R
S
can be
easily determined by the distance of an arbitrary sup-
port vector to the center. Thus the feasible region can
now be modeled by a flexibility model M
F
as
M
F
“ tx
x
x P R
d
|Rpx
x
xq ď R
S
u « X . (2)
The model can be used as a black-box that abstracts
from any explicitly given form of constraints and al-
lows for a decision on whether a given solution is fea-
sible or not. At the same time, decoders serve as an
abstraction layer. Learned from a training set of fea-
sible example schedules, a decoder hides all unit spe-
cific details. In this way, no domain specific knowl-
edge on possible operation, constraints or cost of in-
corporated energy units have to be implemented or
integrated into the algorithm.
For our experiments, we used a decoder as de-
scribed in (Bremer and Sonnenschein, 2013a). Here,
a decoder γ is given as mapping function for sched-
ules x
x
x γ : R
d
Ñ R
d
; γpx
x
xq ÞÑ x
x
x
˚
. With x
x
x
˚
having the
following properties (Sonnenschein et al., 2014):
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
324

• x
x
x
˚
is operable by the respective energy unit with-
out violating any constraint,
• the distance }x
x
x ´ x
x
x
˚
} is small and small depends
on the problem at hand and often denotes the
smallest distance of x
x
x to the feasible region.
The right hand side of Figure 2(b) shows how such a
decoder can be derived from model (2). If a schedule
is feasible it is inside the feasible region (grey area
on the left in Fig. 2(b)). Thus, the schedule is in-
side the pre-image (modeling the feasible region) of
the ball and thus its high-dimensional image lies in-
side the ball. An infeasible schedule (e. g. x
x
x in Fig.
2(b)) lies outside the feasible region and thus its im-
age
ˆ
Ψ
x
lies outside the ball. But, some relations are
known: the center, the distance of the image from the
center and the radius of the ball. Hence, the image
of an infeasible schedule can be moved along the dif-
ference vector towards the center until it touches the
ball. Then, the pre-image of the moved image
˜
Ψ
x
rep-
resents a repaired schedule x
x
x
˚
at the boundary of the
feasible region. No mathematical description of the
original feasible region or of the constraints is needed
to do this. More sophisticated variants of transfor-
mation are e. g. given in (Bremer and Sonnenschein,
2013a).
With such decoder concept for constraint handling
one can now reformulate the optimization problem as
δ
˜
m
ÿ
i“1
γ
i
px
x
x
i
q, ζ
ζ
ζ
¸
Ñ min, (3)
where γ
i
is the decoder function of unit i that pro-
duces feasible, schedules from x
x
x P r0, p
max
s
d
(with
rated power p
max
) resulting in schedules that are oper-
able by that unit. Please note, that with this constraint
free formulation, many standard algorithms for opti-
mization can be easily adapted and no domain specific
implementation (regarding the energy units and their
operation schedules) has to be integrated. Equation
(3) is used as a surrogate objective to find the solution
to the constrained optimization problem equation (1).
So far, this approach has been proven to work fine
if each entity in a virtual power plant is modeled as
a single controlled entity. On the other hand, many
scenarios exist where also ensembles of energy units
should be integrated. In (Bremer and Lehnhoff, 2017)
the problem has been circumvented by integrating a
second level optimization for orchestrating an ensem-
ble internally and representing it by a single coordi-
nating agent. This approach entails additional opti-
mization effort into the overall coordinating process.
Thus, a single flexibility model would be desirable as
an abstraction layer for ensembles of energy units.
3 SAMPLING FROM
ENSEMBLES OF ENERGY
UNITS
Sometimes the technical equipment of a single unit
in a VPP consists of more than just a single genera-
tor (or prosumer or controllable load). Nevertheless,
the owner as operator is still represented by a sin-
gle controlling agent when embedded into a decen-
tralized agent-based control scheme inside a virtual
power plant. In this case that agent has to handle the
ensemble of energy units as a single unit (in a sense
as a single sub VPP) and negotiate to the other agents
with the aggregated flexibility. Nevertheless, there is
usually no joint model of the whole ensemble, and
thus the agent has to use an individual model of each
unit and thus a set of individual decoders for deciding
on an aggregated schedule for the ensemble.
If an agent covers a set of energy units instead of
a single unit, a decoder for the joint feasible region
of the group of units has to be used. A model of the
operation of the ensemble of units is often not avail-
able. Using the training sets of individual energy units
and randomly combining them (adding up exactly one
from each training set) to joint schedules in order to
gain a training set for the joint behavior is not tar-
geted. The problem is that all source trainings sets
are independent random samples and thus the result-
ing training set exhibits a density (of operable power
levels) that results from folding the source distribu-
tions. Figure 3 shows an example. Uniformly dis-
tributed values for levels of power as in the case of
an co-generation plant with sufficient buffer capac-
ity fold up – in case of ensembles with more than
one CHP – to an multi-modal Irvin-Hall-distribution
(Hall, 1927). This distribution has some similarities
to a sharp normal distribution and the more samples
(energy units in the ensemble) are folded the more
leptokurtic the pdf gets. This leads to a sample with a
very high density in the middle of the feasible region.
At the outskirts the sample is extremely sparse. Thus,
instances from the outer parts are neglected as out-
liers from the support vector approach that generates
the surrogate model and the decoder.
For this reason, a decoder trained from such a
training sample reproduces only a very small, inner
portion of the feasible region. In this way, most of the
flexibility that an ensemble could bring in into a vir-
tual power plant control is neglected. This can also be
seen in Figure 4. The rather small grey boxes repre-
sent the data (power levels for different time intervals)
that actually should spread over the area denoted by
the outer whiskers. Only the small inner part is going
to be learned by a model.
Unfolding Ensemble Training Sets for Improved Support Vector Decoders in Energy Management
325

0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
power level / p.u.
0,000
0,005
0,010
0,015
0,020
0,025
0,030
0,035
0,040
0,045
0,050
0,055
0,060
0,065
0,070
0,075
0,080
rel. frequency
1 energy unit
2 energy units
3 energy units
5 energy units
25 energy units
Figure 3: Probability density of different numbers of folded
distributions of operable power levels for co-generation
plants.
Figure 4: Probability distribution of power levels at differ-
ent time intervals of an ensemble of 10 micro CHP units.
The training set exhibits a concentration in the inner part of
the whole flexibility (grey boxes denoting 3{4 of the sam-
ples) making it highly imbalanced.
4 OPTIMIZING THE SAMPLE
DISTRIBUTION
To overcome the problem of folded distributions in
ensemble training sets, we introduce a post process-
ing step that improves a training set of feasible sched-
ules by trying to equally distribute the schedules from
a randomly generated training set across the whole
feasible region that reflects the joint flexibility of the
ensemble of energy units.
To achieve this task, we use a Simulated Anneal-
ing approach (Kirkpatrick et al., 1983).
For optimization we consider the following
model. For each energy unit U
i
a training set X
j
“
tx
x
x
i
u
m
Ď F
i
Ă R
d
of feasible schedules is given. Now,
we can define a set of matrices X
˚
“ tX
X
X
1
, . . . , X
X
X
n
u,
with
X
X
X
i
“
¨
˚
˝
x
x
x
r
1
P X
1
Ď F
i
.
.
.
x
x
x
r
n
P X
n
Ď F
n
˛
‹
‚
, (4)
with uniformly distributed random indices
r
1
, . . . , r
n
„ Up1, mq. Then, row j in matrix X
X
X
i
repre-
sents a randomly chosen sample of a feasible schedule
from energy unit U
j
. The joint training set that re-
flects the flexibility of the whole group of energy units
can now be defined as X
σ
“ tSpX
X
X
1
q, . . . , SpX
X
X
m
qu,
with SpX
X
X
j
q “
ř
n
i“1
x
x
x
i
P X
X
X
j
(x
x
x
i
: ith row of matrix
X
X
X
j
). In X
σ
each element represents the sum of
randomly chosen elements (schedules); one from
each energy unit in the group. In this way, X
σ
represents the aggregated flexibility of the group. For
deriving a machine learning model, this training set
is hardly suitable because of the folded densities due
to summing up over different random series. In the
next step, we want to improve this training set by
correcting the unfavorable densities. To do this, we
first define
h
σ
pX
σ
q “
d´1
ÿ
i“1
h
ˆ
txu
i, j
txu
pi`1q, j
˙
. (5)
Function h
σ
pX
σ
q denotes a concave hull (Duckham
et al., 2008) around the training set and as the calcula-
tion of high-dimensional concave hulls quickly grows
intractable, we approximate by summing up over a set
of 2-dimensional concave hulls around neighboring
cross-sections through the d-dimensional schedules
in the training set. Maximizing the area of the con-
cave hull Aph
σ
q ensures that the flexibility is captured
also at the outskirts of the feasible region. In order
to spread samples equally across this maximized area,
the second indicator comes into play. Let x
j,1
ď x
j,2
ď
¨¨¨ ď x
j,m
be the sorted values of the jth elements of
X
σ
and let x
x
x
σ
“ x
i,2
´ x
i,1
, x
i,3
´ x
i,2
, . . . , x
i,n
´ x
i,m´1
be the series of successive differences. Now we define
the variance
σ
2
δ
“
m´1
ÿ
i“1
P
i
¨
˝
x
δ
i
´
1
n
n´1
ÿ
jě1
x
δ
j
˛
‚
(6)
to measure the spread of differences of the vectors
in the training set. Minimizing this spread ensures
equalizing the spread across the feasible region.
With these two indicators we can now define our
objective: minimize E:
EpX
σ
qw ¨ σ
2
δ
`
1 ´ w
Aph
σ
q
Ñ min (7)
as a weighted mixture of both criteria, which is to be
optimized with respect to the following constraint.Let
x
x
x
j
“ SpX
j
q P X
σ
be an instance from the ensemble
training set. We define feasibility over SpX
j
q: x
x
x
j
is
feasible (cf. Eq. (2)) iff
pX
j
q
1
P F
1
^ pX
j
q
2
P F
2
^ ¨¨¨ ^ pX
j
q
n
P F
n
, (8)
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
326
for all units U
1
, . . . , U
n
in the ensemble U of all units.
In Eq. (8) feasibility of an aggregated schedule x
x
x
j
is checked by probing whether all schedules (rows)
from the respective component matrix that make up
the aggregated schedule are feasible for the respective
energy unit. This can be easily tested with the help of
the respective unit specific flexibility models tM u as
described in Eq. (2).
Simulated Annealing (Kirkpatrick et al., 1983) is
an established Markov Chain Monte Carlo Methods
(MCMC) for non-linear optimization. It mimics a
physical cooling process. In general, MCMC meth-
ods are an effective tool for statistical sampling ap-
plied to optimization problems (Li et al., 2009).
Algorithm 1 shows the general process for opti-
mizing the unfavorable densities due to the folded dis-
tributions in aggregated ensemble training sets. First,
for each energy unit in the group, a specific train-
ing set is sampled from an appropriately parameter-
ized simulation model and a flexibility model M
F
i
is
trained for units i. Each of these flexibility models is
able to decide for the respective energy unit whether a
given schedule is operable or not. Next, the algorithm
is initialized with temperature ϑ, weights w for the ob-
jective and a cooling rate. While no stopping criterion
is met the following loop is executed. The training set
is mutated to generate a new offspring training set.
The mutation operator for our Simulated Annealing
is defined as follows:
p
X
σ
r
σ
“ X
σ
r
σ
`
¨
˚
˝
r
1
„ N p0, σ
2
q
.
.
.
r
m
„ N p0, σ
2
q
˛
‹
‚
. (9)
Mutation is done by adding a vector with normal dis-
tributed random values (with variance σ
2
as step size)
to a randomly chosen instance r
σ
„ Up1, mq from X
σ
.
Not necessarily all components have to be mutated
at the same time. Algorithm 1 shows a version with
only 20% of the components mutated. The feasibility
of the mutated training set element is checked with
the help of the set of flexibility models tM
F
u. If the
mutated element is not feasible, it is rejected until a
feasible version is found. With this barrier approach
feasibility of the solution is ensured. Finally, the ob-
jective value of mutated training set is compared with
the old one and accepted (or not) after the metropolis
criterion.
5 RESULTS
To evaluate the effectiveness of our approach, we sim-
ulated ensembles of non-homogeneous micro-CHP of
Algorithm 1 : Basic scheme for the Simulated Annealing
approach for ensemble training set improvement.
sample units
build models tM
F
u
n
for single units
build X
X
X
˚
and X
σ
initialize temperature ϑ and weights w
while ϑ ă ϑ
min
do
repeat
p
X
σ
Ð X
σ
j Ð r „ Up0, mq
for c “ 1; c ă m; c++ do
if r „ Up0, 1q ď 0.2 then
p
X
σ
j,c
Ð X
σ
` r „ N p0, σ
2
q
end if
end for
check feasibility Eq. (8)
until mutation feasible
if e
´
Ep
p
X
σ
q´EpX
σ
q
ϑ
ą r „ U p0, 1q then
X
σ
Ð
p
X
σ
end if
ϑ Ð coolingpϑq
end while
0 0.2 0.4
0.6
0.8 1
¨10
6
0
1
2
3
4
iteration
error
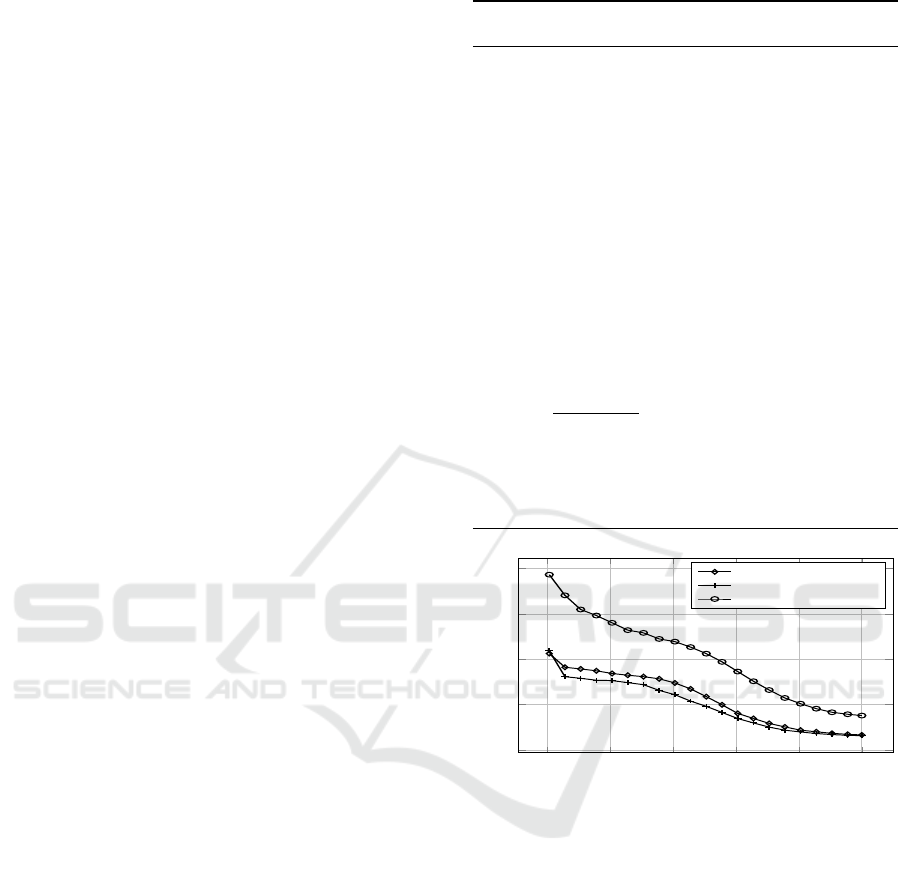
d “ 5, n “ 10, σ
2
“ 1%
d “ 5, n “ 10, σ
2
“ 5%
d “ 16, n “ 10, σ
2
“ 1%
Figure 5: Convergence of the SA approach.
different size. We tested the performance of re-
spectively two classifiers that make up the flexibility
model (one trained with the original ensemble train-
ing set and one trained with the respective optimized
training set). Table 1 shows the result for different en-
semble sizes up to groups of 50 units. Up to 40 units
the Simulated Annealing approach works very well.
Table 1 compares for both classifiers the accuracy, the
sensitivity, the specificity and the miss rate respec-
tively calculated by comparing the classification re-
sult (feasible and thus operable by the ensemble, or
not) with the simulation model (simulating whether a
schedule is really operable, or not).
The accuracy denotes the rate of correctly classi-
fied schedules (feasible as well as not feasible). Af-
ter optimizing and planing the training set, the trained
classifiers perform almost as well as in the single unit
case (Bremer et al., 2011). In the case of 50 units
Unfolding Ensemble Training Sets for Improved Support Vector Decoders in Energy Management
327
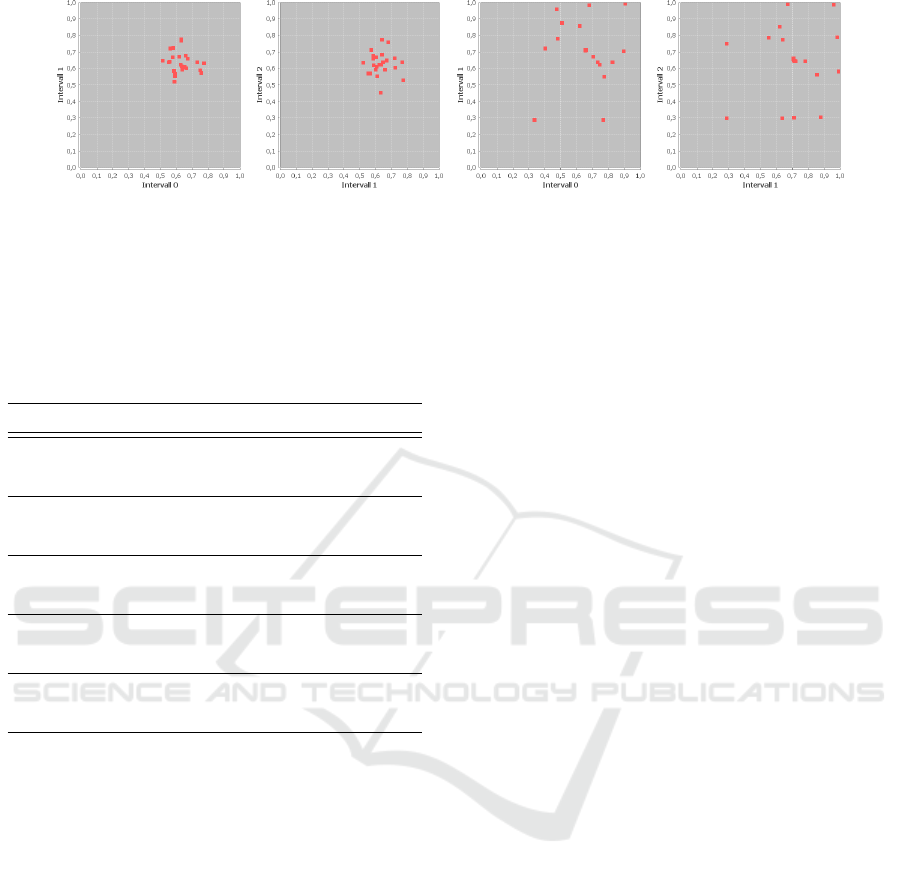
(a) (b)
Figure 6: Before-and-after test for an ensemble of 20 micro-co-generation plants with 5-dimensional schedules. (a) shows the
aggregated training set before unfolding and the improvement after (b).
Table 1: Classifier performances of classifiers (search space
models) trained with the original training set (X
orig
) with
folded power level distributions and with the improved
training sets (X
opt
) optimized with the SA approach.
# units set accuracy sensitivity specificity miss
m “ 10
X
σ
orig
0.493 0.027 0.999 0.972
X
σ
opt
0.935 0.921 0.951 0.078
m “ 20
X
σ
orig
0.506 0.043 1.000 0.957
X
σ
opt
0.938 0.903 0.975 0.097
m “ 30
X
σ
orig
0.513 0.002 0.999 0.997
X
σ
opt
0.964 0.963 0.964 0.037
m “ 40
X
σ
orig
0.497 0.002 1.000 0.998
X
σ
opt
0.907 0.843 0.972 0.157
m “ 50
X
orig
0.572 0.001 1.000 0.999
X
opt
0.577 0.015 0.998 0.985
(or more) the improvement drops rapidly. The sen-
sitivity shows the share of correctly classified feasi-
ble schedules. The specificity, on the other hand, de-
notes the rate of correctly classified infeasible sched-
ules (compared with all schedules). This score of
course is unbeatable high for the original training set,
because with this training set the feasible region is
seriously underestimated in size (only a small, cen-
tral sub-region is learned) and thus almost never in-
feasible schedules at the boundary of the real (lots
larger) regions is falsely classified. Nevertheless, the
improved training set performs almost as good. The
miss rate shows the rate of falsely classified infea-
sible schedules which drops significantly after op-
timizing the training set. A visual impression of
the improvement that is achieved by the optimiza-
tion of the training set can be seen in Figure 6. The
figure shows 2-dimensional intersections through 5-
dimensional schedules before and after optimization.
The convergence of the algorithms has been tested on
several scenarios. Figure 5 shows some of the results.
6 CONCLUSION AND FURTHER
WORK
Using machine learning approaches for flexibility
modeling and automatically deriving decoders from
these models for efficient and domain knowledge in-
dependent implementation of (distributed) optimiza-
tion methods has proven a useful tool in managing the
future smart grid. So far, these models can only be
applied to single energy units, because distributions
of power levels in the training sets of single units fold
up when aggregating them to ensemble training sets.
Thus, the training set render useless for appropriately
deriving a model for the joint flexibility of a group of
energy units. We presented an approach to overcome
the problem of folded distributions when training de-
coders for ensembles of energy resources in predictive
scheduling. For this reason, we introduced an inter-
mediate step prior to model training. After aggregat-
ing schedules from training sets for the flexibility of
individual energy resources (resulting in a training set
with an abnormally high density of training instances
in the middle of the feasible region), a Simulated An-
nealing step attenuates this skewed density while at
the same time maintaining the feasibility of the sched-
ules.
Future work still has to show whether the process
of correcting the training set density can be achieved
sufficiently fast also for short term predictive schedul-
ing. Up to now, the Simulated Annealing approach
takes up to several minutes to complete. Another
necessary improvement will distribute the training set
correction to a fully decentralized approach. Never-
theless, the results so far demonstrate the feasibility
of correcting to training set of ensembles of energy
units.
With our approach also households, hotels, small
businesses, schools or similar with an ensemble of co-
generation, heat pump, solar power, and controllable
consumers will be able to take part in agent-based
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
328

decentralized predictive scheduling for providing en-
ergy services in future smart grid architectures with-
out a need for an (expensive) individual link of each
single device in the ensemble.
REFERENCES
Abarrategui, O., Marti, J., and Gonzalez, A. (2009). Con-
structing the active european power grid. In Proceed-
ings of WCPEE09, Cairo.
Awerbuch, S. and Preston, A. M., editors (1997). The Vir-
tual Utility: Accounting, Technology & Competitive
Aspects of the Emerging Industry, volume 26 of Top-
ics in Regulatory Economics and Policy. Kluwer Aca-
demic Publishers.
Bremer, J. and Lehnhoff, S. (2017). Hybrid Multi-ensemble
Scheduling, pages 342–358. Springer International
Publishing, Cham.
Bremer, J., Rapp, B., and Sonnenschein, M. (2011). Encod-
ing distributed search spaces for virtual power plants.
In IEEE Symposium Series on Computational Intelli-
gence 2011 (SSCI 2011), Paris, France.
Bremer, J. and Sonnenschein, M. (2013a). Constraint-
handling for optimization with support vector sur-
rogate models. In Filipe, J. and Fred, A., editors,
ICAART 2013 – Proceedings of the 5th International
Conference on Agents and Artificial Intelligence, vol-
ume 2, pages 91–105, Barcelona, Spain. SciTePress.
Bremer, J. and Sonnenschein, M. (2013b). Model-based in-
tegration of constrained search spaces into distributed
planning of active power provision. Comput. Sci. Inf.
Syst., 10(4):1823–1854.
Bremer, J. and Sonnenschein, M. (2013c). Sampling the
search space of energy resources for self-organized,
agent-based planning of active power provision. In
Page, B., Fleischer, A. G., G
¨
obel, J., and Wohlgemuth,
V., editors, 27th International Conference on Environ-
mental Informatics for Environmental Protection, En-
viroInfo 2013, pages 214–222. Shaker.
Coello Coello, C. A. (2002). Theoretical and numerical
constraint-handling techniques used with evolutionary
algorithms: a survey of the state of the art. Com-
puter Methods in Applied Mechanics and Engineer-
ing, 191(11-12):1245–1287.
Duckham, M., Kulik, L., Worboys, M., and Galton, A.
(2008). Efficient generation of simple polygons for
characterizing the shape of a set of points in the plane.
Pattern Recognition, 41(10):3224 – 3236.
European Parliament & Council (2009). Directive
2009/28/ec of 23 april 2009 on the promotion of the
use of energy from renewable sources and amending
and subsequently repealing directives 2001/77/ec and
2003/30/ec.
Gieseke, F. and Kramer, O. (2013). Towards non-linear
constraint estimation for expensive optimization. In
Esparcia-Alc
´
azar, A., editor, Applications of Evolu-
tionary Computation, volume 7835 of LNCS, pages
459–468. Springer Berlin Heidelberg.
Hall, P. (1927). The distribution of means for samples of
size n drawn from a population in which the variate
takes values between 0 and 1, all such values being
equally probable. Biometrika, 19(3/4):pp. 240–245.
Hinrichs, C. (2014). Selbstorganisierte Einsatzplanung
dezentraler Akteure im Smart Grid. PhD thesis, Carl
von Ossietzky Universitt Oldenburg.
Hinrichs, C., Bremer, J., and Sonnenschein, M. (2013). Dis-
tributed Hybrid Constraint Handling in Large Scale
Virtual Power Plants. In IEEE PES Conference on In-
novative Smart Grid Technologies Europe (ISGT Eu-
rope 2013). IEEE Power & Energy Society.
Kamphuis, R., Warmer, C., Hommelberg, M., and Kok, K.
(2007). Massive coordination of dispersed generation
using powermatcher based software agents. In 19th
International Conference on Electricity Distribution.
Kirkpatrick, S., Gelatt, C. D., and Vecchi, M. P. (1983).
Optimization by simulated annealing. Science,
220(4598):671–680.
Kramer, O. (2010). A review of constraint-handling tech-
niques for evolution strategies. Appl. Comp. Intell.
Soft Comput., 2010:1–19.
Li, Y., Protopopescu, V. A., Arnold, N., Zhang, X., and
Gorin, A. (2009). Hybrid parallel tempering and sim-
ulated annealing method. Applied Mathematics and
Computation, 212(1):216–228.
McArthur, S., Davidson, E., Catterson, V., Dimeas, A.,
Hatziargyriou, N., Ponci, F., and Funabashi, T. (2007).
Multi-agent systems for power engineering applica-
tions – Part I: Concepts, approaches, and technical
challenges. IEEE Transactions on Power Systems,
22(4):1743–1752.
Nieße, A., Lehnhoff, S., Tr
¨
oschel, M., Uslar, M., Wiss-
ing, C., Appelrath, H.-J., and Sonnenschein, M.
(2012). Market–based self–organized provision of ac-
tive power and ancillary services. IEEE.
Padhy, N. (2004). Unit Commitment - A Bibliographi-
cal Survey. IEEE Transactions on Power Systems,
19(2):1196–1205.
Pinto, R., Bessa, R. J., and Matos, M. A. (2017). Surrogate
model of multi-period flexibility from a home energy
management system. CoRR, abs/1703.08825.
Ramchurn, S. D., Vytelingum, P., Rogers, A., and Jennings,
N. R. (2011). Agent-based homeostatic control for
green energy in the smart grid. ACM Trans. Intell.
Syst. Technol., 2(4):35:1–35:28.
Schiendorfer, A., Stegh
¨
ofer, J.-P., and Reif, W. (2014). Syn-
thesised constraint models for distributed energy man-
agement. In Ganzha, M., Maciaszek, L. A., and Pa-
przycki, M., editors, Proceedings of the Federated
Conference on Computer Science and Information
Systems, pages 1529–1538, Warsaw, Poland.
Smith, A. and Coit, D. (1997). Handbook of Evolutionary
Computation, chapter Penalty Functions, page Section
C5.2. Oxford University Press and IOP Publishing,
Department of Industrial Engineering, University of
Pittsburgh, USA.
Sonnenschein, M., L
¨
unsdorf, O., Bremer, J., and Tr
¨
oschel,
M. (2014). Decentralized control of units in smart
grids for the support of renewable energy supply. En-
vironmental Impact Assessment Review, (0):–.
Tax, D. M. J. and Duin, R. P. W. (2004). Support vector data
description. Mach. Learn., 54(1):45–66.
Unfolding Ensemble Training Sets for Improved Support Vector Decoders in Energy Management
329
