
Dynamic Pricing Strategies in a Finite Horizon Duopoly
with Partial Information
Rainer Schlosser and Keven Richly
Hasso Plattner Institute, University of Potsdam, Potsdam, Germany
Keywords:
Dynamic Pricing, Duopoly Competition, Response Strategies, Hidden Markov Model, Heuristics.
Abstract:
In many applications the sale of perishable products is characterized by competitive settings and incomplete
information. While prices of sellers are typically observable, the inventory levels of firms are mutually not
observable. In this paper, we analyze stochastic dynamic pricing models in a finite horizon duopoly with
partial information. We use a Hidden Markov Model approach to compute strategies that are applicable when
the competitor’s inventory level is not observable. Our approach utilizes feedback pricing strategies that
are optimal if the competitor’s inventory level is observable. We show that price reactions are balancing
two effects: (i) to slightly undercut the competitor’s price to sell more items, and (ii) to use high prices to
promote a competitor’s run-out and to act as a monopolist for the rest of the time horizon. Moreover, we
compute heuristic strategies that can be applied when the number of competitors is large and their strategies
are unknown. We find that expected profits are hardly affected by different information structures as long as
the firms’ information is symmetric.
1 INTRODUCTION
In many markets, firms offering their products have to
deal with competition and limited information. Sell-
ers are required to choose appropriate pricing de-
cisions to maximize their expected profits. In e-
commerce, it has become easy to observe and to
change prices. Hence, dynamic pricing strategies that
take into account the competitor’s strategies will be
more and more applied.
However, optimal price reactions are not easy to
find. Applications can be found in a variety of con-
texts that involve perishable (e.g., airline tickets, ac-
commodation services, seasonal products) as well as
durable goods (e.g., technical devices, natural re-
sources).
In this paper, we study duopoly pricing models in
a stochastic dynamic framework. We focus on per-
ishable goods. In our model, sales probabilities are
allowed to be an arbitrary function of time and the
competitor’s prices. Our aim is to take into account
scenarios in which (i) the competitor’s inventory level
is observable, (ii) the competitor’s inventory level is
not observable, and (iii) even the competitor’s pricing
strategy is unknown.
The best way to sell products is a classical appli-
cation of revenue management theory. The problem is
closely related to the field of dynamic pricing, which
is summarized in the books by Talluri, van Ryzin
(2004), Phillips (2005), and Yeoman, McMahon-
Beattie (2011). The survey by Chen, Chen (2015)
provides an excellent overview of recent pricing mod-
els under competition.
In the article by Gallego, Wang (2014) the authors
consider a continuous time multi-product oligopoly
for differentiated perishable goods. They use opti-
mality conditions to reduce the multi-dimensional dy-
namic pure pricing problem to a one dimensional one.
Gallego, Hu (2014) analyze structural properties of
equilibrium strategies in more general oligopoly mod-
els for the sale of perishable products. Martinez-
de-Albeniz, Talluri (2011) consider duopoly and
oligopoly pricing models for identical products. They
use a general stochastic counting process to model the
demand of customers.
Further related models are studied by Yang, Xia
(2013) and Wu, Wu (2015). Dynamic pricing mod-
els under competition that also include strategic cus-
tomers are analyzed by Levin et al. (2009) and Liu,
Zhang (2013). Competitive pricing models with lim-
ited demand information are studied by Tsai, Hung
(2009), Adida, Perakis (2010), and Chung et al.
(2012) using robust optimization and demand learn-
ing approaches. The effects of strategic interaction of
Schlosser, R. and Richly, K.
Dynamic Pricing Strategies in a Finite Horizon Duopoly with Partial Information.
DOI: 10.5220/0006529900210030
In Proceedings of the 7th International Conference on Operations Research and Enterprise Systems (ICORES 2018), pages 21-30
ISBN: 978-989-758-285-1
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
21

data-driven strategies in competitive settings are stud-
ied by, e.g., Serth et al. (2017), using an interactive
simulation platform.
In most existing models strong assumptions are
made: (i) sales probabilities are assumed to be of a
highly stylized form, (ii) the competitors’ inventory
levels are assumed to be observable, and (iii) com-
petitors adjust their prices at the same point in time.
While many papers concentrate on (the existence of)
equilibrium strategies, we look for applicable solution
algorithms that allow to compute effective response
strategies in more realistic settings: Demand proba-
bilities are allowed to generally depend on time as
well as the prices of all market participants. Inven-
tory levels do not have to be mutually observable. As
in many practical applications, we assume sequential
mutual price reactions with some delay. We consider
a discrete time model which is based on the infinite
horizon model by Schlosser, Boissier (2017). We ex-
tend their model by limited inventory levels as well as
a finite horizon setting.
The main contribution of this paper is threefold.
We (i) derive optimal pricing strategies when the com-
petitor’s inventory level is observable, (ii) derive near-
optimal pricing strategies for the case that the com-
petitor’s inventory level is not observable, and (iii)
we present a heuristic for the case that competitors’
strategies are not known.
This paper is organized as follows. In Section 2,
we describe the stochastic dynamic duopoly model
for the sale of a finite number of perishable goods. We
allow sales intensities to depend on the competitor’s
price as well as on time (seasonal effects). The state
space of our model is characterized by time and the
current competitors’ prices. The stochastic dynamic
control problem is expressed in discrete time.
In Section 3, we consider a duopoly competition,
in which the inventory level of the competitor is ob-
servable. We assume that both competitors act ratio-
nally. We set up a firm’s Hamilton-Jacobi-Bellman
equation and use recursive methods (value iteration)
to compute both firms’ value functions. Finally, we
are able to compute optimal feedback prices as well as
expected profits of the two competing firms. By using
numerical examples, we investigate typical properties
of optimal pricing policies.
In Section 4, we analyze response strategies for
cases where the inventory level of the competitor is
not observable. Using a Hidden Markov Model, we
show how to compute efficient pricing strategies and
how to evaluate expected profits. Our proposed solu-
tion approach is based on the results of the full infor-
mation model introduced in the previous section. The
key idea is to let the competing firms mutually esti-
mate their competitor’s remaining inventory level. In
Section 5, we show how to derive applicable dynamic
pricing heuristics for cases in which the competitor’s
inventory level as well as its pricing strategy are com-
pletely unknown.
Finally, in Section 6, we compare the different
strategies derived in this paper. Conclusions are of-
fered in the final section.
2 MODEL DESCRIPTION
We consider the situation in which a firm wants to sell
a finite number of goods (e.g., airline tickets, hotel
tickets, etc.) on a digital market platform. We assume
that a second seller competes for the same market. In
our model, we allow customers to compare prices of
the two different competitors.
The initial number of items of firm 1 and firm 2 are
denoted by N
(1)
and N
(2)
, respectively, N
(1)
,N
(2)
<
∞. We assume that items cannot be reproduced or
reordered. The time horizon T is finite, T < ∞. If
firm k sells one item shipping costs c
(k)
have to be
paid, k = 1, 2. A sale of one of firm k’s items at price
a leads to a net revenue of a −c
(k)
. Discounting is also
included in the model. For the length of one period we
use the discount factor δ, 0 < δ ≤ 1..
Due to customer choice the sales probabilities of
a firm should depend on its offer price a and the com-
petitor’s price p. We also allow the sales probabilities
to depend on time.
The (joint) probability that between time t and
t +∆ firm 1 can sell exactly i items at a price a, a ≥ 0,
while firm 2 can sell j items at price p, p ≥ 0, is de-
noted by, 0 ≤ t < T , i, j = 0,1,2,..., ∆ > 0,
P
(∆)
t
(i, j, a, p)
Without loss of generality, in the following, we
assume Poisson distributed sales probabilities, i.e.,
P
(∆)
t
(i, j, a, p) :=
Λ
(1)
t,∆
(a, p)
i
i!
· e
−Λ
(1)
t,∆
(a,p)
·
Λ
(2)
t,∆
(p,a)
j
j!
· e
−Λ
(2)
t,∆
(p,a)
, (1)
where Λ
(k)
t,∆
(a, p) :=
R
t+∆
t
λ
(k)
s
(a, p)ds, k = 1,2, a, p ≥
0; the sales intensity of a firm k’s product is denoted
by λ
(k)
. In our model, the sales intensity of firm k,
k = 1, 2, t = [0,T ], a ≥ 0, p ≥ 0,
λ
(k)
t
(a, p) (2)
is a general function of time t, offer price a, and the
competitor’s price p. The random inventory level
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
22

of firm k at time t is denoted by X
(k)
t
, 0 ≤ t ≤
T . The end of sale for firm k is the random time
τ
(k)
, when all of its items are sold, that is τ
(k)
:=
min
0≤t≤T
n
t : X
(k)
t
= 0
o
∧ T ; for all remaining t ≥ τ
we let a firm’s price a
t
:= 0 and λ
(k)
t
(0,·) := 0, k =
1,2. As long as a firm has items left to sell, for each
period t, a price a has to be chosen.
We call strategies (a
t
)
t
admissible if they belong
to the class of Markovian feedback policies; i.e., pric-
ing decisions a
t
≥ 0 may depend on time t, the current
own inventory level, the current prices of the competi-
tor, and (if observable) the inventory level of the com-
petitor. By A we denote the set of admissible prices.
A list of variables and parameters is given in the Ap-
pendix, see Table 5.
In some applications, sellers are able to anticipate
transitions of the market situation. In particular, the
price responses of competitors as well as their reac-
tion time can be taken into account. In this case,
a change of the competitor’s price p can take place
within one period. A typical scenario is that a com-
petitor adjusts its price in response to our price adjust-
ment with a certain delay.
In the following two sections, we assume that the
pricing strategy and the reaction time of competitors
are known; i.e., we assume that choosing a price a at
time t is followed by a state transition (e.g., a competi-
tor’s price reaction) and the current price p changes to
a subsequent price reaction, which may depend on the
current price decision a.
We assume that the state of the system is charac-
terized by the inventory levels of both firms and the
current competitor’s price. In real-life applications, a
firm is not able to adjust its prices immediately after
the price reaction of the competing firm. Hence, we
assume that in each period the price reaction of the
competing firm takes place with a delay of h periods,
0 < h < 1. I.e., after an interval of size h the competi-
tor adjusts its price, see Figure 1.
Thus in period t the probability to sell exactly i
items during the first interval of size h, i.e., [t,t + h],
is P
(h)
t
(i, j, a
t
, p
t−1+h
), t = 0,1,...,T − 1. Due to
the competitor’s price reaction for the rest of the
period [t + h,t + 1] the sales probability changes to
P
(1−h)
t+h
(i, j, a
t
, p
t+h
), t = 0,1,...,T − 1.
For single intervals [0,h] and [T,T + h], we
assume that there is no demand and we let
P
(h)
0
(i, j, a
0
, p
0
) = P
(h)
T
(i, j, a
T
, p
T −1+h
) := 1
{i= j=0}
.
The evolution of the cumulated profits of firm k,
k = 1, 2, is connected to its inventory process X
(k)
t
and
characterized by each period’s realized net revenues.
Depending on the chosen pricing strategy (a
t
)
t
of firm
1 and the strategy (p
t
)
t
of firm 2, the random accu-
|
t h
+
|
|
|
|
|
t
a
t
1
t
+
0
T h
+
|
|
T
1
T h
− +
t h
p
+
1
t h
p
− +
1
T
a
−
0
a
1
T h
p
− +
h
h
p
1
|
1
a
Figure 1: Sequence of price reactions in a duopoly with
response time h, 0 < h < 1.
mulated profit of firm k from time t on (discounted on
time t) amounts to, 0 ≤ t ≤ T , k = 1,2,
G
(k)
t
:=
T −1
∑
s=t
δ
s−t
· (a
s
− c
(k)
) ·
X
(k)
s
− X
(k)
s+1
. (3)
Each firm k seeks to determine a non-anticipating
(Markovian) pricing policy that maximizes its ex-
pected total profit, k = 1, 2,
E
G
(k)
0
X
(1)
0
= N
(1)
,X
(2)
0
= N
(2)
. (4)
In the following sections, we will solve dynamic
pricing problems that are related to (1) - (4). In the
next section, we consider competitive duopoly mar-
kets with complete information. In Section 4, we
compute pricing strategies for scenarios with incom-
plete information and partially observable states, i.e.,
we assume that the competitor’s inventory level is not
observable. In Section 5, we additionally assume that
the competitor’s strategy is unknown. In Section 6,
we compare the results of the three different models.
3 OPTIMAL DYNAMIC PRICING
STRATEGIES IN A DUOPOLY
WITH OBSERVABLE STATES
3.1 Solution with Full Knowledge
In this section, we want to derive mutual optimal price
response strategies. We assume that both firms can
mutually observe their inventory levels. Following
the Bellman approach, the best expected future prof-
its of firm 1 and firm 2, i.e., E(G
(1)
t
|X
(1)
t
= n,X
(2)
t
=
m,p
t
= p) and E(G
(2)
t+h
|X
(1)
t+h
= n,X
(2)
t+h
= m,a
t+h
= a),
respectively, cf. (4), are described by the value func-
tions V
∗
t
(n,m, p) and W
∗
t+h
(n,m,a), t = 0, 1, ..., T . The
set of admissible prices A can be continuous or dis-
crete. If either all items are sold or the time is up,
no future profits can be made, i.e., the natural bound-
ary condition for the value functions V and W are
given by, n = 0,1,...,N
(1)
, m = 0, 1, ..., N
(2)
, a, p ∈ A,
t = 0,1,...,T − 1,
V
∗
t
(0,m, p) = 0, and V
∗
T
(n,m, p) = 0, (5)
Dynamic Pricing Strategies in a Finite Horizon Duopoly with Partial Information
23

W
∗
t+h
(n,0,a) = 0, and W
∗
T +h
(n,m,a) = 0. (6)
We assume that in case of a run-out a firm sets
its price equal to zero for the rest of the time horizon.
The Hamilton-Jacobi-Bellman (HJB) equation of firm
1 can be written as, t = 0, 1, ...,T − 1, n = 1, ..., N
(1)
,
m = 0,...,N
(2)
, 0 < h < 1, a, p ∈ A,
V
∗
t
(n,m, p) = max
a∈A
(
∑
i
1
, j
1
≥0
P
(h)
t
(i
1
, j
1
,a, p)
·
∑
i
2
, j
2
≥0
P
(1−h)
t+h
i
2
, j
2
,1
{n−i
1
>0}
· a,
p
∗
t+h
(n − i
1
)
+
,(m − j
1
)
+
,1
{n−i
1
>0}
· a
·
(a − c
(1)
) · min(n,i
1
+ i
2
)+
+δ·V
∗
t+1
(n − i
1
− i
2
)
+
,(m − j
1
− j
2
)
+
,1
{m− j
1
− j
2
>0}
·p
∗
t+h
(n − i
1
)
+
,(m − j
1
)
+
,1
{n−i
1
>0}
· a
. (7)
Note, (7) mirrors all possible sales scenarios
within one period of time and takes the corresponding
inventory transitions as well as the anticipated optimal
price reactions of the competitor into account.
The HJB of firm 2 is given by, t = 0,1, ..., T − 1,
n = 0,...,N
(1)
, m = 1,...,N
(2)
, 0 < h < 1, a, p ∈ A,
W
∗
t+h
(n,m,a) = max
p∈A
(
∑
i
2
, j
2
≥0
P
(1−h)
t+h
(i
2
, j
2
,a, p)
·
∑
i
1
, j
1
≥0
P
(h)
t+1
(i
1
, j
1
,
a
∗
t+1
(n − i
1
)
+
,(m − j
1
)
+
,1
{m− j
1
>0}
· p
,1
{m− j
1
>0}
· p
·
(p − c
(2)
) · min(m, j
1
+ j
2
)+
+δ ·W
∗
t+1+h
(n − i
1
− i
2
)
+
,(m − j
1
− j
2
)
+
,1
{n−i
1
−i
2
>0}
·a
∗
t+1
(n − i
1
)
+
,(m − j
1
)
+
,1
{m− j
1
>0}
· p
. (8)
The associated prices of both firms are given by
the arg max of (7) and (8), respectively, i.e., n, m > 0,
t = 0,1,...,T − 1,
a
∗
t
(n,m, p) = argmax
a∈A
{
...
}
, (9)
p
∗
t+h
(n,m,a) = argmax
p∈A
{
...
}
. (10)
If a firm runs out of inventory, we set the price 0,
i.e., for all m, p we let a
∗
t
(0,m, p) = 0 and for all n, a,
we let p
∗
t+h
(n,0,a) = 0. The coupled value functions
and the optimal feedback policies of the two compet-
ing firms can be computed in the following recursive
order:
p
∗
T −1+h
(n,m,a),W
∗
T −1+h
(n,m,a) →
a
∗
T −1
(n,m, p),V
∗
T −1
(n,m, p)→ . . .
...→ p
∗
h
(n,m,a),W
∗
h
(n,m,a)
→a
∗
0
(n,m, p),V
∗
0
(n,m, p). (11)
3.2 Numerical Examples
To illustrate the approach, cf. (7) - (11), in the
following, we consider a numerical example.
Example 3.1. We assume a duopoly. Let T = 50,
c
(1)
= c
(2)
= 10, N
(1)
= N
(2)
= 10, δ = 1, h = 0.5,
and a ∈ A := (10,20,...,400). We assume Poisson
distributed sales probabilities P
(h)
t
(i, j, a, p), which
are determined by t = 0, h, 1, ..., T , k = 1,2, cf. (1),
Λ
(k)
t,h
(a, p) := h ·
1 − e
−10
5
·a
−2.5+t/T
· β(a, p), and the
factor β(a, p) :=
1
{a>0}
·(p−L·min(a,p))
a+p−2·L·min(a,p)
, L := 0.8 < 1.
Table 1 illustrates the expected profits of firm 1
for different inventory levels n and different points
in time t (for the case that firm 2’s price is p = 100
and its inventory level is N
(2)
= 10). We observe that
the expected future profits are decreasing in time and
increasing-decreasing in the number of items left to
sell. The optimal expected profits of the second firm
have the same characteristics. Compared to firm 1
the total expected profits of firm 2 are slightly larger
(W
∗
h
(10,10,a
∗
0
(10,10,0)) = 1769).
Table 1: Expected profits V
∗
t
(n,10, 100), Example 3.1.
n\t 0 10 20 30 40 45
1 363 362 359 348 306 252
2 654 652 640 601 494 368
3 877 872 852 788 628 423
5 1213 1202 1166 1056 782 381
7 1464 1449 1396 1233 737 381
10 1754 1726 1638 1348 723 381
Table 2 illustrates the feedback prices of firm 1
for different competitor’s inventory levels m and dif-
ferent prices p (for the case that t = 20 and firm 1’s
inventory level is N
(1)
= 10). We observe that opti-
mal response prices are decreasing-increasing in the
competitor’s price and decreasing in the competitor’s
inventory level. I.e., in general, there is an incentive
to (slightly) undercut the competitor’s price.
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
24
However, if the competitor has a small price and
a small inventory level then it is more advantageous
to set high prices such that the competitor is likely
to sell all of its items, and in turn, our firm becomes
a monopolist for the rest of the time horizon. If
the competitor’s inventory level is small, the opti-
mal price can even dominate the monopoly price, cf.
a
∗
20
(10,0,0) = 260 in Table 2!
Table 2: Expected profits a
∗
20
(10,m, p), Example 3.1.
p\m 0 1 2 3 5 7 10
0 260 . . . . . .
50 . 400 390 300 220 200 160
100 . 400 390 300 220 200 160
150 . 400 310 300 220 190 140
200 . 400 280 250 190 180 150
250 . 340 260 200 190 180 150
300 . 240 210 200 190 180 150
400 . 220 200 200 190 180 150
Remark 3.1.
(i) The expected profits are increasing-decreasing
in their own inventory level.
(ii) The expected profits are decreasing in the com-
petitor’s inventory level.
(iii) If there is no discounting then the expected prof-
its are increasing in the time-to-go.
(iv) The expected profits are increasing-decreasing in
the current competitor’s price.
Remark 3.2.
(i) The optimal prices are not necessarily decreasing
in their own inventory level.
(ii) The optimal prices are decreasing in the competi-
tor’s inventory level.
(iii) If demand is not increasing in time then the op-
timal prices are decreasing in the time.
(iv) The optimal prices are decreasing-increasing in
the current competitor’s price.
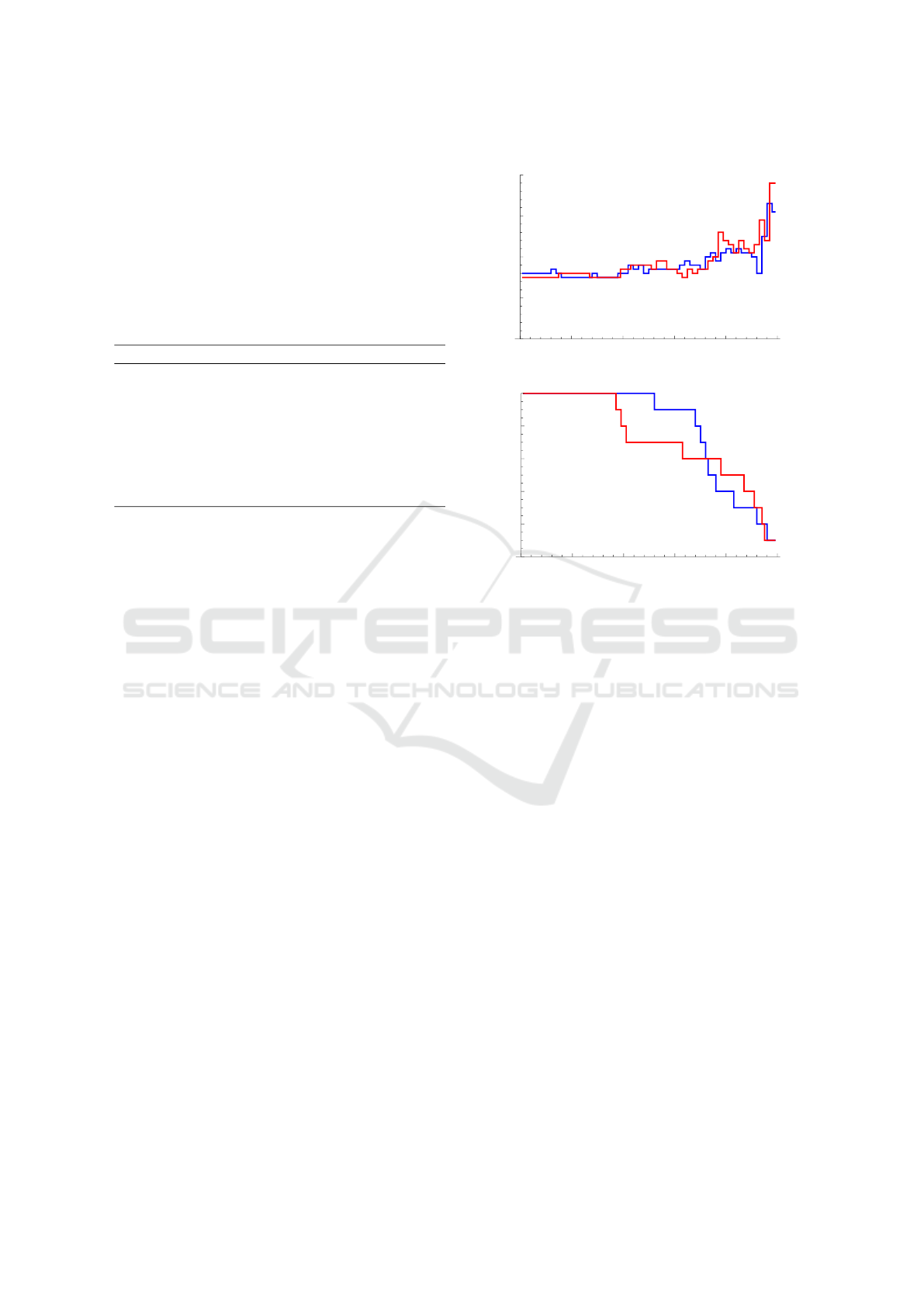
Figure 2 illustrates simulated sales processes in
the context of Example 3.1. Figure 2a illustrates price
trajectories of the two competing firms. Figure 2b
shows the associated evolutions of the inventory lev-
els. As demand is increasing in time, on average,
prices as well as the number of sales increase at the
end of the time horizon.
0 10 20 30 40 50
t
100
200
300
400
price
a
t
p
t
0 10 20 30 40 50
t
2
4
6
8
10
inventory
X
t
(2)
X
t
(1)
Figure 2: Simulated price paths (upper window 2a) and as-
sociated inventory levels over time (lower window 2b); Ex-
ample 3.1.
4 A HIDDEN MARKOV MODEL
WITH PARTIALLY
OBSERVABLE STATES
4.1 Theoretical Solution
In this section, we will assume that the competi-
tor’s inventory level cannot be observed. To derive
feedback pricing strategies we use a Hidden Markov
Model. We will use probability distributions for the
competitor’s inventory level, which are based on the
observable price paths of both firms.
Let π
t
(m) denote the (estimated) probability that
firm 2 has exactly m items left at time t; let ϖ
t
(n)
denote the probability that firm 1 has exactly n items
left at time t. We assume that the initial inventory
levels of both competitors are common knowledge;
i.e., the starting distributions are π
0
(m) = π
h
(m) =
1
{m=N
(2)
}
and ω
0
(n) = ω
h
(n) = 1
{n=N
(1)
}
. Further-
more, a run-out is observable, since we assume that
in case of a run-out a firm has to set its price equal to
zero. The evolutions of the probabilities π
t
(m) and
ϖ
t
(n) are given by, n = 0, ..., N
(1)
, m = 0,...,N
(2)
,
a
t
, p
t
,a
t−1+h
, p
t−1+h
∈ A, t = 0,1,...,T ,
Dynamic Pricing Strategies in a Finite Horizon Duopoly with Partial Information
25

π
t+h
(m;a
t
, p
t
) =
∑
i
1
, j
1
≥0,0≤m
−
≤N
(2)
:
m=(m
−
− j
1
)
+
P
(h)
t
(i
1
, j
1
,a
t
, p
t
) · π
t
(m
−
)
π
t
(m;a
t−1+h
, p
t−1+h
) =
∑
i
2
, j
2
≥0,
0≤m
−
≤N
(2)
:
m=(m
−
− j
2
)
+
P
(1−h)
t−1+h
(i
2
, j
2
,a
t−1+h
, p
t−1+h
) · π
t−1+h
(m
−
)
(12)
ϖ
t+h
(n;a
t
, p
t
) =
∑
i
1
, j
1
≥0,0≤n
−
≤N
(1)
:
n=(n
−
−i
1
)
+
P
(h)
t
(i
1
, j
1
,a
t
, p
t
) · ϖ
t
(n
−
)
ϖ
t
(n;a
t−1+h
, p
t−1+h
) =
∑
i
2
, j
2
≥0,
0≤n
−
≤N
(1)
:
n=(n
−
−i
2
)
+
P
(1−h)
t−1+h
(i
2
, j
2
,a
t−1+h
, p
t−1+h
) · ϖ
t−1+h
(n
−
).
(13)
Note, (12) and (13) are relevant for both firms as
they might try to estimate (i) the competitor’s inven-
tory level as well as (ii) the competitor’s beliefs con-
cerning the own inventory. This way the competitor’s
price reactions can be anticipated via a probability
distribution.
Both firms are assumed to act rationally. Pricing
decisions are such that no firm has an advantage to de-
viate from its strategy. Due to the defined sequence of
events, theoretically, optimal decisions can be recur-
sively inferred. The corresponding value functions of
both firms, denoted by
V
(∗)
t
(n, p,
~
π
t
,
~
ω
t
) (14)
W
(∗)
t+h
(m,a,
~
π
t+h
,
~
ω
t+h
), (15)
are determined by the usual boundary conditions
V
(∗)
t
(0,·,·,·) = 0, V
(∗)
T
(·,·,·,·) = 0 (for firm 1)
and W
(∗)
t+h
(0,·,·,·) = 0, W
(∗)
T +h
(·,·,·,·) = 0 (for firm
2) as well as an associated system of Bellman
equations similar to (7)-(8) extended by transitions
for the beliefs, cf. (12)-(13). The correspond-
ing optimal feedback policies a
(∗)
t
(n, p,
~
π
t
,
~
ω
t
) and
p
(∗)
t+h
(m,a,
~
π
t+h
,
~
ω
t+h
) of the two competing firms can
be computed in recursive order (similar to (9)-(11)).
However, optimal policies cannot be computed in
practical applications. Note, the size of the state space
is exploding as the probability distributions
~
π and
~
ω
are involved (curse of dimensionality). Hence, heuris-
tic solutions are needed.
In the following subsection, we present an ap-
proach to compute viable heuristic feedback pric-
ing strategies for the model with partially observ-
able states. The key idea is to approximate the func-
tions V
(∗)
t
(n, p,
~
π
t
,
~
ω
t
) and W
(∗)
t+h
(m,a,
~
π
t+h
,
~
ω
t+h
) by
using weighted expressions of the value functions
V
∗
t
(n,m, p) and W
∗
t
(n,m,a) (of the model with full
knowledge) and their associated policies a
∗
t
(n,m, p)
and p
∗
t
(n,m,a) derived in Section 3.
4.2 Solution with Partial Knowledge
Motivated by the Hidden Markov Model (HMM),
cf. Section 4.1, in which the competitor’s inventory
level cannot be observed, next, we want to define vi-
able heuristic pricing strategies for the two competing
firms. Based on current beliefs, we approximate the
correct value functions (14) - (15) (and related con-
trols) using price reactions (9) - (10) and future profits
(7) - (8) of the fully observable model. As the value
functions of the fully observable model might system-
atically overestimate the correct values (14) - (15), we
include an additional positive penalty factor z. If z is
smaller than 1, future profits (7) - (8) are reduced.
For firm 1 we define the feedback prices, t =
0,1,...,T − 1, n = 1, ..., N
(1)
, p ∈ A,
˜a
t
(n, p;
~
π
t
,
~
ω
t
) = argmax
a∈A
(
∑
i
1
, j
1
≥0
P
(h)
t
(i
1
, j
1
,a, p)
·
∑
0≤ ˜m≤N
(2)
π
t
( ˜m) ·
∑
0≤ ˜n≤N
(1)
ϖ
t
( ˜n) ·
∑
i
2
, j
2
≥0
P
(1−h)
t+h
(i
2
, j
2
,
1
{ ˜n−i
1
>0}
· a, p
∗
t+h
( ˜n − i
1
)
+
,( ˜m − j
1
)
+
,1
{ ˜n−i
1
>0}
· a
·
(a − c
(1)
) · min(n,i
1
+ i
2
) + δ · z
·V
∗
t+1
(n − i
1
− i
2
)
+
,( ˜m − j
1
− j
2
)
+
,1
{ ˜m− j
1
− j
2
>0}
·p
∗
t+h
( ˜n − i
1
)
+
,( ˜m − j
1
)
+
,1
{ ˜n−i
1
>0}
· a
. (16)
Note, (16) mirrors the beliefs for both inventory
levels and the corresponding transitions. For antici-
pated price reactions we use p
∗
, cf. (10). To estimate
future profits we use z ·V
∗
, cf. (7).
Similarly, the prices of firm 2 are given by, t =
0,1,...,T − 1, m = 1, ..., N
(2)
, a ∈ A,
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
26
˜p
t+h
(m,a;
~
π
t
,
~
ω
t
) = argmax
p∈A
(
∑
i
1
, j
1
≥0
P
(1−h)
t+h
(i
1
, j
1
,a, p)
·
∑
0≤ ˜m≤N
(2)
π
t+h
( ˜m) ·
∑
0≤ ˜n≤N
(1)
ϖ
t+h
( ˜n) ·
∑
i
2
, j
2
≥0
P
(h)
t+1
(i
2
, j
2
,
a
∗
t+1
( ˜n − i
1
)
+
,( ˜m − j
1
)
+
,1
{ ˜m− j
1
>0}
· p
,1
{ ˜m− j
1
>0}
· p
·
(p − c
(2)
) · min(m, j
1
+ j
2
) + δ · z
·W
∗
t+1+h
( ˜n − i
1
− i
2
)
+
,(m − j
1
− j
2
)
+
,1
{ ˜n−i
1
−i
2
>0}
·a
∗
t+1
( ˜n − i
1
)
+
,( ˜m − j
1
)
+
,1
{ ˜m− j
1
>0}
· p
. (17)
In each period, realized sales are used to update
the beliefs π and ω such that the prices (16) and (17)
can be computed during the sales process, i.e.:
˜a
0
(N
(1)
,0;
~
π
0
,
~
ω
0
)→
~
π
h
,
~
ω
h
→ ˜p
h
(N
(2)
,a
h
;
~
π
h
,
~
ω
h
)
→
~
π
1
,
~
ω
1
→ ˜a
1
(X
(1)
1
, p
1
;
~
π
1
,
~
ω
1
)→ ...
... ˜a
T −1
(X
(1)
T −1
, p
T −1
;
~
π
T −1
,
~
ω
T −1
)→
~
π
T −1+h
,
~
ω
T −1+h
→ ˜p
T −1+h
(X
(2)
T −1+h
,a
T −1+h
;
~
π
T −1+h
,
~
ω
T −1+h
). (18)
Using simulations both firms’ expected profits as
well as their distributions can be easily approximated.
Evaluating different z values makes it possible to
identify the (mutual) best z value.
4.3 Numerical Example
To illustrate our approach, in this subsection, we
consider a numerical example.
Example 4.1. We assume the setting of Example 3.1.
Both firms use the heuristic Hidden Markov strate-
gies, cf. (16) - (18), for different parameter values z,
0.2 ≤ z ≤ 1.5.
We observe that z has an impact on the expected
profits of both competing firms. In our example, the
simulated average profits of both firms are maximized
for z = 0.8. Note, the lower z is the more risk averse
(or aggressive) are the pricing policies (see standard
deviations σ), cf. Table 3.
Table 3: Simulated expected profits and its standard de-
viations of both firms for different z values, Example 4.1.
z EG
(1)
0
EG
(2)
0
EX
(1)
T
EX
(2)
T
σ(G
(1)
0
) σ(G
(2)
0
)
0.2 1141 1104 0.00 0.00 209 188
0.5 1679 1701 0.44 0.42 249 258
0.6 1743 1741 0.70 0.57 320 283
0.7 1742 1756 0.89 0.79 351 338
0.8 1739 1770 1.15 0.90 397 359
0.9 1732 1753 1.19 1.29 393 420
1.0 1716 1748 1.43 1.40 419 426
1.1 1686 1740 1.72 1.39 452 417
1.2 1668 1715 1.90 1.59 456 427
1.5 1647 1639 2.07 2.31 454 470
Remark 4.1. (Parallelization.)
The computation of feedback policies and particu-
larly extensive simulation studies can become CPU-
intensive. Parallelization can be used to compute re-
sults more efficiently:
(i) Feedback prices for the same point in time can
run in parallel.
(ii) Simulations can be computed independent from
each other.
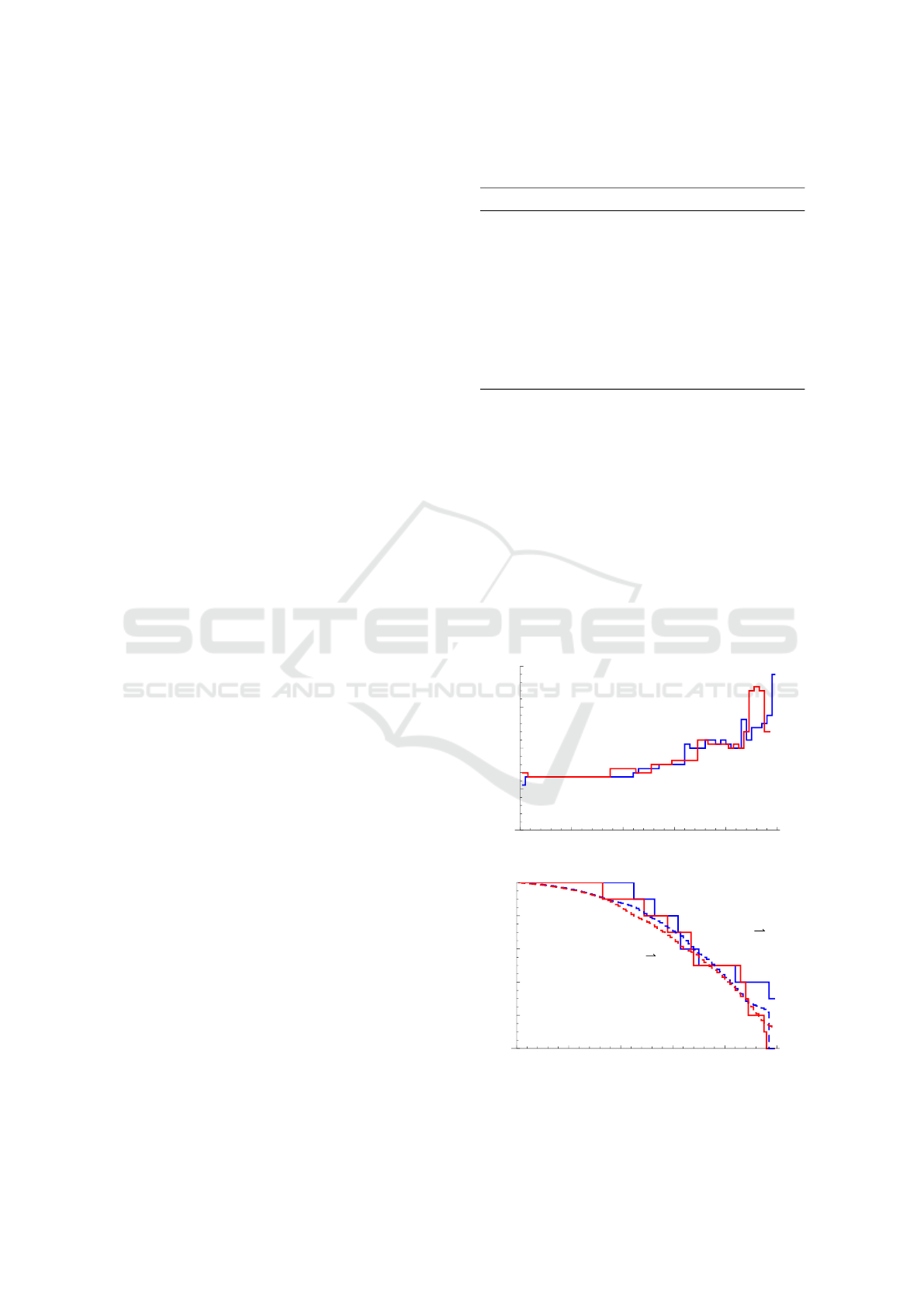
Figure 3 illustrates simulated sales processes in
the context of Example 4.1. Figure 3a illustrates price
trajectories of the two competing firms. Figure 3b
0 10 20 30 40 50
t
100
200
300
400
price
p
t
a
t
0 10 20 30 40 50
t
2
4
6
8
10
inventory
X
t
(2)
X
t
(1)
E[X
t
(1)
,ω ]
E[X
t
(2)
,π ]
Figure 3: Simulated price paths (upper window 3a) and as-
sociated (estimated) inventory levels over time (lower win-
dow 3b), z = 0.8; Example 4.1.
Dynamic Pricing Strategies in a Finite Horizon Duopoly with Partial Information
27
shows the associated evolutions of the inventory lev-
els and the (mutually) estimated inventory levels of
the competitor (dashed plots).
5 UNKNOWN STRATEGIES
In this section, we want to present another heuristic
approach to derive effective pricing strategies in com-
petitive markets with limited information. We assume
that the strategy of the competitor is completely un-
known.
Our key idea to deal with unknown price reactions
is to assume sticky prices. For firm 1, we define the
following value function, p ∈ A, n ≥ 1, t = 0,1,...,T −
1,
¯
V
t
(0, p) = 0,
¯
V
T
(n, p) = 0,
¯
V
t
(n, p) = max
a∈A
(
∑
i
1
, j
1
P
(h)
t
(i
1
, j
1
,a, p)
·
∑
i
2
, j
2
P
(1−h)
t+h
(i
2
, j
2
,a, p) ·
(a − c
(1)
) · min(n,i
1
+ i
2
)
+δ ·
¯
V
t+1
(n − i
1
− i
2
)
+
, p
. (19)
The heuristic strategy ¯a
t
(n, p) – determined by the
arg max of (19) – only depends on t, n, and p. Sim-
ilarly, the corresponding pricing strategy ¯p
t
(m,a) of
firm 2 is determined by the arg max of, a ∈ A, m ≥ 1,
t = 0,1,...,T − 1,
¯
W
t+h
(0,a) = 0,
¯
W
T +h
(m,a) = 0,
¯
W
t+h
(m,a) = max
p∈A
(
∑
i
2
, j
2
P
(1−h)
t+h
(i
2
, j
2
,a, p)
·
∑
i
1
, j
1
P
(h)
t+1
(i
1
, j
1
,a, p) ·
(p − c
(2)
) · min(m, j
1
+ j
2
)
+δ ·
¯
W
t+1+h
(m − j
1
− j
2
)
+
,a
. (20)
The advantage of this approach is that the
value function does not need to be computed for
all competitors’ prices p in advance. The value
function and the associated pricing policy can be
computed separately for single prices p (e.g., just
when they occur). If the competitor’s strategy is not
known (which is often the case) it is not possible to
anticipate potential price adjustments. This feedback
strategy is able to react immediately if a change of the
competitor’s price takes place. In such an event, the
value function (19) - (20) and the associated prices
have to be computed for the new state.
Remark 5.1. (Oligopoly Competition.)
Note, due to the curse of dimensionality, the strategies
derived in Section 3 and 4 are just applicable when the
number of competitors is small. The heuristic strategy
described above, however, can still be applied when
the number of competitors is large! In case of K com-
petitors, the state p in (19) just have to be replaced by
~p = (p
(1)
,..., p
(K)
), p
(k)
∈ A, k = 1,...,K.
0 10 20 30 40 50
t
100
200
300
400
price
p
t
a
t
0 10 20 30 40 50
t
2
4
6
8
10
inventory
X
t
(2)
X
t
(1)
Figure 4: Simulated price paths (upper window 4a) and as-
sociated inventory levels over time (lower window 4b); set-
ting of Example 3.1.
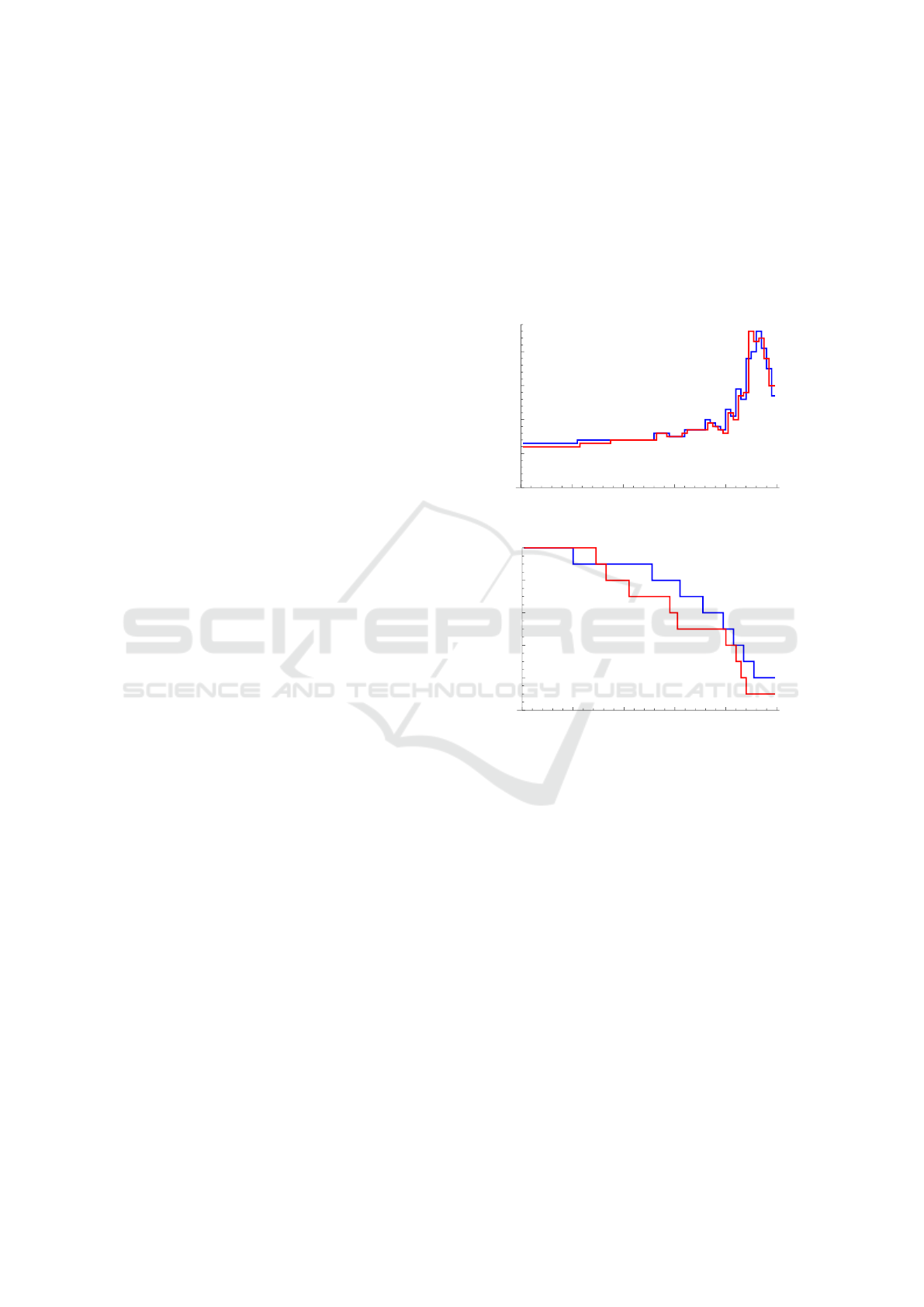
For the case that the competitor’s strategy is un-
known, Figure 4 illustrates simulated sales processes
based on the heuristic, cf. (19) - (20), in the context
of Example 3.1. Figure 4a illustrates price trajectories
of the two competing firms. We observe that firms ei-
ther raise the price or undercut the competitor’s price.
Figure 4b shows the corresponding inventory levels.
6 STRATEGY COMPARISON
In this section, we want to compare the outcome of
our different solution strategies which take advantage
of different kind of information.
If pricing strategies are allowed to use full infor-
mation, i.e., the own inventory level, the competitor’s
inventory, and the competitor’s price, then the opti-
mal expected profits can be computed analytically, cf.
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
28

Section 3. In case the competitor’s inventory level is
not known, we presented an approach to compute vi-
able strategies via a Hidden Markov Model, cf. Sec-
tion 4. If the competitor’s inventory is not known and
his/her pricing strategy as well as his/her reaction time
is not known, we proposed an efficient heuristic.
By S
FK
, we denote the strategy derived in Section
3 (full knowledge). By S
PK
, we denote the response
strategy derived in Section 4 (partial knowledge) with
z = 0.8. By S
UK
, we denote the heuristic strategy,
cf. Section 5, in case that the competitor’s strategy
is unknown. Considering the setting of Example 3.1
and Example 4.1, the expected profits of the different
symmetric strategy combinations are summarized in
Table 4.
Table 4: Expected profits EG
(1)
0
(of firm 1) and EG
(2)
0
(of
firm 2), when firm 1 and firm 2 play different pairs of strate-
gies: S
FK
(both use full knowledge), S
PK
(both use partial
knowledge), S
UK
(mutually unknown strategies), cf. Exam-
ple 3.1 - 4.1.
Case EG
(1)
0
EG
(2)
0
EX
(1)
T
EX
(2)
T
σ(G
(1)
0
) σ(G
(2)
0
)
FK 1754 1769 1.51 1.51 467 469
PK 1739 1770 1.15 0.90 397 359
UK 1771 1768 0.78 0.47 329 312
In the three cases expected total profits, expected
remaining inventory, and standard deviations of to-
tal profits have been approximated using simulations.
Surprisingly, we observe that in all three scenarios
both firms can expect similar profits. It turns out that
as long as information structure is symmetric, a lack
of information does not necessarily result in smaller
expected profits.
The number of unsold items (cf. load factor), as
well as the variance of profits, however, have signif-
icant differences. In case of fully observable states
(S
FK
vs. S
FK
) the remaining inventory and the vari-
ance of profits is comparably high. Both firms can
expect almost equal results. In the second case with
partially observable states (S
PK
vs. S
PK
) we observe
that the load factor of both firms is higher and the vari-
ation of profits is much smaller. Since less informa-
tion is available the competition between both firms is
less intense.
In case of mutual unknown strategies (S
UK
vs.
S
UK
) we obtain a similar result. Furthermore, we can
assume that the heuristic S
UK
strategy will yield ro-
bust results when played against various other strate-
gies. The other two strategies are optimized to play
against a specific strategy. Hence, they might perform
less well, when the competitor is playing a different
strategy. Moreover, the efficient computation of our
heuristic S
UK
allows for fast computation times, and
in turn a high price reaction frequency, which is also
a competitive advantage.
7 CONCLUSION
In e-commerce, it has become easier to observe and
adjust prices automatically. Consequently, there ex-
ists an increased demand for dynamic pricing. The
computation of suitable pricing strategies is highly
challenging as soon as strategic competitors are in-
volved and remaining inventory levels play a major
role. In this paper, we analyzed stochastic dynamic
finite horizon duopoly models characterized by price
responses in discrete time. We allow sales probabili-
ties to generally depend on time as well as the com-
petitors’ prices. Further, we are able to model differ-
ent reaction times.
We have considered three different types of infor-
mation structure. In the first setting, we assume that
the inventory levels of the competing firms are mutu-
ally observable. We show that optimal price reaction
strategies – which are based on mutual price anticipa-
tions – can be derived using standard methods (e.g.,
backward induction). Examples are used to identify
structural properties of expected profits and feedback
pricing strategies. Optimal prices are balancing two
effects: (i) slightly undercut the competitor’s price in
order to sell more items, and (ii) the use of high prices
in order to promote a competitor’s run-out and to act
as a monopolist for the rest of the time horizon.
In the second setting, we assume that the inven-
tory of the competitor is not observable. Based on
observable prices, we compute probability distribu-
tions (beliefs) for the number of items the competitor
might have left to sell. We propose a simplified Hid-
den Markov Model to be able to compute applicable
feedback pricing strategies. Our examples show that
the resulting expected profits of both firms are similar
to those obtained in the model with full knowledge.
The variance of profits and the average number of re-
maining items, however, is significantly lower.
In the third setting, we assume that the competi-
tor’s strategy is completely unknown, i.e., competi-
tors cannot anticipate price responses. We propose
an efficient decomposition approach to circumvent
the curse of dimensionality and demonstrate how to
compute powerful pricing strategies. We verify that
– when applied by both competitors – the heuristic
yields the same expected profits as in the two other
settings, in which more information is available.
To this end, we have shown how to compute ap-
plicable reaction strategies for real-life scenarios with
different information structures. We find that ex-
Dynamic Pricing Strategies in a Finite Horizon Duopoly with Partial Information
29

pected profits are hardly affected by less information
as long as the information structure is symmetric.
REFERENCES
Adida, E., G. Perakis. 2010. Dynamic Pricing and Inven-
tory Control: Uncertainty and Competition. Opera-
tions Research 58 (2), 289–302.
Chen, M., Z.-L. Chen. 2015. Recent Developments in Dy-
namic Pricing Research: Multiple Products, Compe-
tition, and Limited Demand Information. Production
and Operations Management 24 (5), 704–731.
Chung, B. D., J. Li, T. Yao, C. Kwon, T. L. Friesz. 2012.
Demand Learning and Dynamic Pricing under Com-
petition in a State-Space Framework. IEEE Transac-
tions on Engineering Management 59 (2), 240–249.
Gallego, G., M. Hu 2014. Dynamic Pricing of Perishable
Assets under Competition. Management Science 60
(5), 1241–1259.
Gallego, G., R. Wang. 2014. Multi-Product Optimization
and Competition under the Nested Logit Model with
Product-Differentiated Price Sensitivities. Operations
Research 62 (2), 450–461.
Levin, Y., J. McGill, M. Nediak. 2009. Dynamic Pricing in
the Presence of Strategic Consumers and Oligopolistic
Competition. Operations Research 55, 32–46.
Liu, Q., D. Zhang. 2013. Dynamic Pricing Competition
with Strategic Customers under Vertical Product Dif-
ferentiation. Management Science 59 (1), 84–101.
Martinez-de-Albeniz, V., K. T. Talluri. 2011. Dynamic Price
Competition with Fixed Capacities. Management Sci-
ence 57 (6), 1078–1093.
Phillips, R. L. 2005. Pricing and Revenue Optimization.
Stanford University Press.
Schlosser, R., M. Boissier. 2017. Optimal Price Reaction
Strategies in the Presence of Active and Passive Com-
petitors. 6th International Conference on Operations
Research and Enterprise Systems (ICORES 2017),
47–56.
Serth, S., N. Podlesny, M. Bornstein, J. Latt, J. Lin-
demann, J. Selke, R. Schlosser, M. Boissier, and
M. Uflacker. 2017. An Interactive Platform to Sim-
ulate Dynamic Pricing Competition on Online Mar-
ketplaces. 21st IEEE International Enterprise Dis-
tributed Object Computing Conference, EDOC 2017.
Talluri, K. T., G. van Ryzin. 2004. The Theory and Practice
of Revenue Management. Kluver Academic Publish-
ers.
Tsai, W.-H., S.-J. Hung. 2009. Dynamic Pricing and Rev-
enue Management Process in Internet Retailing under
Uncertainty: An Integrated Real Options Approach.
Omega 37 (2-37), 471–481.
Wu, L.-L., D. Wu. 2015. Dynamic Pricing and Risk Analyt-
ics under Competition and Stochastic Reference Price
Effects. IEEE Transactions on Industrial Informatics
12 (3), 1282–1293.
Yang, J., Y. Xia. 2013. A Nonatomic-Game Approach to
Dynamic Pricing under Competition. Production and
Operations Management 22 (1), 88–103.
Yeoman, I., U. McMahon-Beattie. 2011. Revenue Man-
agement: A Practical Pricing Perspective. Palgrave
Macmillan.
APPENDIX
Table 5: List of variables and parameters.
t time / period
c
(k)
shipping costs of firm k, k = 1,2
G
(k)
t
random future profits of firm k
N
(k)
t
initial number of sold items of firm k
X
(k)
t
random inventory level of firm k
δ discount factor
h reaction time
P
(h)
t
sales probability for (t,t + h)
A set of admissible prices
V value function of firm 1
W value function of firm 2
a offer price of firm 1
p offer price of firm 2
n inventory state of firm 1
m inventory state of firm 2
π(m) beliefs of firm 1
ω(n) beliefs of firm 2
a
∗
, p
∗
strategies (full knowledge)
˜a, ˜p strategies (partial knowledge)
¯a, ¯p strategies (no knowledge)
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
30
