
A Generic Agent Architecture for Cooperative Multi-agent Games
Jo
˜
ao Marinheiro
1
and Henrique Lopes Cardoso
1,2
1
DEI/FEUP, Faculdade de Engenharia, Universidade do Porto, Porto, Portugal
2
LIACC – Laborat
´
orio de Intelig
ˆ
encia Artificial e Ci
ˆ
encia de Computadores, Porto, Portugal
Keywords:
Multi-agent Systems, Cooperative Games, Negotiation, Opponent Modeling, Trust Reasoning.
Abstract:
Traditional search techniques are difficult to apply to cooperative negotiation games, due to the often enormous
search trees and the difficulty in calculating the value of a players position or move. We propose a generic
agent architecture that ensembles negotiation, trust and opponent modeling, simplifying the development of
agents capable of playing these games effectively by introducing modules to handle these challenges. We
demonstrate the application of this modular architecture by instantiating it in two different games and testing
the designed agents in a variety of scenarios; we also assess the role of the negotiation, trust and opponent
modeling modules in each of the games. Results show that the architecture is generic enough to be applied in
a wide variety of games. Furthermore, we conclude that the inclusion of the three modules allows for more
effective agents to be built.
1 INTRODUCTION
Games have always been an important testbed to
develop new and interesting ideas in AI research.
There has been extensive research using games like
Chess (Drogoul, 1995) or Go (Silver et al., 2016).
However, most research in this area relates to tradi-
tional adversarial games and makes use of extensive
searching and game specific heuristics in order to find
the best move
1
.
One interesting category of games is that of co-
operative negotiation games, where players are en-
couraged to barter and create or break deals between
themselves in order to win. In the field of game the-
ory, a game is considered a cooperative game if play-
ers are able to form binding commitments with each-
other. Games in which players can not create binding
agreements are usually considered non-cooperative
games (Nash, 1951). It is usually assumed that com-
munication between players is allowed in cooperative
games but not in non-cooperative games.
For the purposes of this work, however, we con-
sider a different, more general, definition of coop-
erative games – games in which cooperation be-
tween players is possible and encouraged but which
is not necessarily based on binding agreements. More
1
The DeepMind approach (Silver et al., 2016) is a late
deviation to this status quo, and has recently been applied to
imperfect information games (Heinrich and Silver, 2016).
specifically, we will focus on cooperative negotia-
tion games with a mix of cooperation and competi-
tion. Some characteristics that are frequently present
in these games are:
• Very large search spaces, which makes the appli-
cation of traditional search techniques impracti-
cal.
• Difficulty in evaluating moves and player posi-
tions due to how the values for these often depend
on the social context of the game.
• The possibility of betrayals and desertions due to
the existence of non-binding agreements.
Two examples of cooperative negotiation games
are Diplomacy (Calhamer, 2000) and Werewolves
of Miller’s Hollow (des Palli
`
eres and Marly, 2009).
Diplomacy is a strategy game for 7 players where
each player takes control of a nation. By submitting
orders to their armies and navies, which are executed
simultaneously with those of other nations, players
must try to capture territories and supply centers in
a map of Europe. The first player to capture 18 or
more supply centers wins the game. Because players
can issue orders to support their opponents, the game
encourages players to negotiate and cooperate among
themselves in order to win the game.
Werewolves of Miller’s Hollow, on the other hand,
is a team based game where two teams, the villagers
and the werewolves, attempt to eliminate each other.
Marinheiro J. and Lopes Cardoso H.
A Generic Agent Architecture for Cooperative Multi-agent Games.
DOI: 10.5220/0006253101070118
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 107-118
ISBN: 978-989-758-219-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
107

The twist is that the players on the villager team
do not know who their team mates are and who the
werewolves are, encouraging players to communi-
cate, share information and decide who to trust. The
game is played in two phases: the day phase, where
players communicate freely, ending with a vote to
eliminate one player thought to be a werewolf by the
remaining players; and the night phase, where play-
ers cannot communicate but can choose to use some
special abilities depending on their role in the game.
Due to the characteristics of cooperative negotia-
tion games it is possible to obtain much better results
in these games if one is able to negotiate and coor-
dinate with other players effectively. Unfortunately,
while humans are very good at negotiation and intu-
itively distinguish who to trust, it is much harder for
a computer to do so. In order to develop effective and
believable software agents for these sorts of games,
and cope with the large size of the search spaces, new
strategies that can effectively tackle the concepts of
negotiation, opponent modeling and trust reasoning
need to be employed. We propose a generic agent ar-
chitecture that tackles these concepts and facilitates
the development of agents with these capabilities to
play cooperative negotiation games.
The rest of this paper is structured as follows. In
Section 2 we briefly describe some of the existing ap-
proaches in this area. Section 3 introduces the pro-
posed architecture and its different modules. Then,
in Section 4 we describe some agents implemented
using the proposed architecture. In Section 5 we de-
scribe the tests and experiments executed using the
developed agents, together with some results. Finally,
in Section 6, we discuss the implications and conclu-
sions taken from the results obtained as well as some
possible future work towards the improvement of the
proposed architecture and developed agents.
2 RELATED WORK
Cooperative negotiation games have not received too
much attention in the field of artificial intelligence, the
game of Diplomacy being a notable exception. We
here discuss some of the many agents created to play
Diplomacy, since to the best of our knowledge no sig-
nificant research has been applied to other cooperative
games.
One of the simplest agents implemented for
Diplomacy – DumbBot – was developed by David
Norman (Norman, 2013). This bot has no negotia-
tion capabilities and uses a simple heuristic to decide
its actions by preferring to choose moves that weaken
its strongest opponents. DumbBot assigns a value
to each territory that depends on who controls it and
what units are around it, and then it assigns actions to
every unit depending on those score values. While the
method used is very simple, DumbBot obtains fairly
good results and is frequently used as a benchmark
for other Diplomacy agents.
One of the most important and influential nego-
tiating agents is the Israeli Diplomat (Kraus et al.,
1989; Kraus et al., 1995). This agent was designed
with a general negotiation architecture to be applied
in a variety of situations. The Israeli Diplomat tries to
mimic the structure of a war-time nation. It consists
of several components working together to choose the
best course of action. The diplomat keeps a knowl-
edge base of the relations it believes each nation has
with each other, as well as any agreements it has and
its intention to keep them, together with its trust that
others will keep them as well. This knowledge base
is updated by the different modules as the game pro-
gresses, and affects every decision the diplomat takes.
Another interesting approach in this area is that
of D-Brane (de Jonge, 2015), an agent developed by
Dave de Jonge that makes use of the NB
3
algorithm as
well as a complex strategical module to find the best
sets of moves to negotiate and play. This agent uses
a basic form of opponent modeling by using the util-
ity values of deals previously proposed and accepted
by its opponents as a way to direct the search for bet-
ter solutions; however, it does not make an attempt
to explicitly predict an opponent’s goals or strategies.
Another aspect that this agent lacks is the ability to
negotiate coalitions with other agents as well as joint
moves for future phases of the game, having no nego-
tiation strategy for these kinds of deals.
Finally, DipBlue (Ferreira et al., 2015) is a ne-
gotiating agent for Diplomacy inspired by the Israeli
Diplomat architecture. The agent is split into sev-
eral modules called Advisers, that together decide the
actions the agent takes. Each adviser receives move
scores evaluated by previous advisers and alters them
according to its role. The base adviser is inspired
by DumbBot and uses the same scoring heuristic.
This score is then changed by other advisers to pro-
mote support actions for the units, promote actions
that keep agreements with its allies and encourage the
agent to attack players that it distrusts. In order to
model the trust value of each player, DipBlue keeps a
trust matrix that is updated as the game is played. If a
player performs hostile actions against DipBlue, such
as attacking or breaking an agreement, its trust value
diminishes. If a player performs friendly actions, or
refrains from doing hostile actions, its trust value in-
creases. DipBlue is more likely to accept agreements
and help players with which it has a high trust value,
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
108
and attack players with a low trust value. DipBlue
does not have full negotiation capabilities, lacking the
ability to ask and give information or threaten players.
3 ALPHA
This section introduces the proposed Alpha architec-
ture and its modules, which intends to approach sev-
eral of the challenges present in cooperative negoti-
ation games and facilitate the development of agents
for these games.
3.1 Alpha Architecture
We propose a generic architecture that tackles sev-
eral of the issues present in cooperative negotiation
games, allowing for the creation of agents capable of
negotiation, trust reasoning and opponent modeling in
a simple way. In order to be used in a variety of games
and environments this architecture is required to be as
generic as possible, making no assumptions about ne-
gotiation protocol, negotiation strategy, player goals,
and search strategy. As such, the proposed archi-
tecture, which we dubbed the Alpha architecture, is
modular and based on the architecture of the Israeli
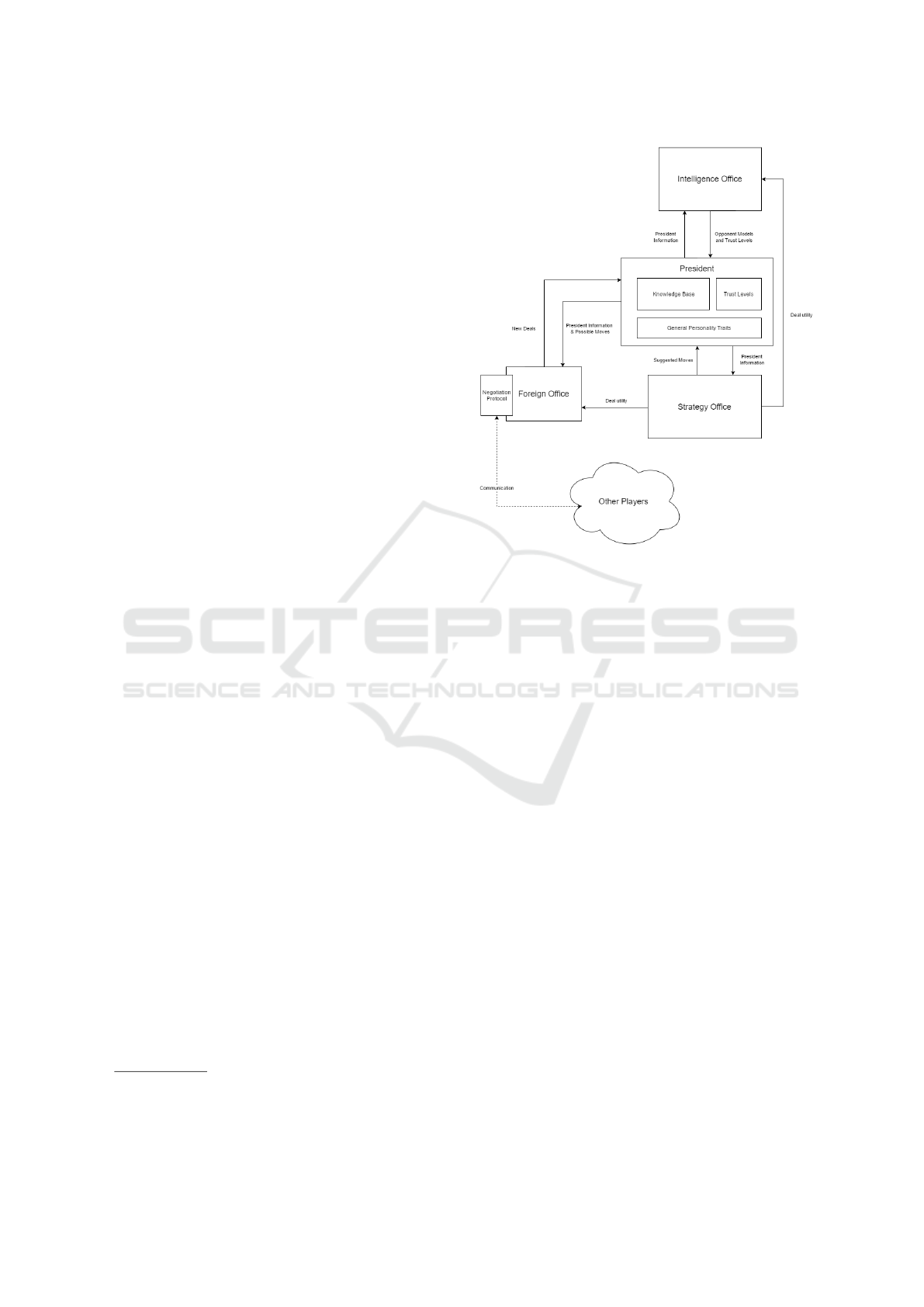
Diplomat and DipBlue. Figure 1 shows a simplified
overview of the Alpha architecture.
Like the Israeli Diplomat, it is based on the struc-
ture of a wartime nation, with four different indepen-
dent modules
2
:
• The President: in charge of coordinating other
modules and taking the final decisions.
• The Strategy Office: in charge of suggesting
good strategies to the President.
• The Foreign Office: in charge of negotiation.
• The Intelligence Office: in charge of predicting
what opponents are likely to do.
This structure allows the architecture to have a
clean separation between the different independent
modules for the different subjects of negotiation, op-
ponent modeling, the strategic and tactical evaluation
of the game and the high level agent personality and
overall strategy. As a result, the user can easily and
effortlessly swap out the modules at will and decide
what capabilities the agent should have, allowing for
great freedom in designing agents. By creating a rela-
tively small quantity of these modules and combining
them in different ways the developer can create a large
2
These modules can also be seen as agents, making the
Alpha architecture a multi-agent system, as in (Johansson
and H
˚
a
˚
ard, 2005; Johansson and Olsson, 2005).
Figure 1: High-level diagram of the Alpha architecture and
its modules.
variety of agents with different behaviors and capabil-
ities in a short time.
3.1.1 The President
The President (PR) acts as the central module for the
agent, holding its personality characteristics, coordi-
nating the other modules, defining the overall high
level strategy of the agent through the definition of its
goals, and being in charge of selecting and executing
the moves for the player.
In order to do this the PR keeps a knowledge base
of everything it needs to know about the environment
and its opponents. This knowledge base is then also
used and modified by the remaining three modules,
allowing the PR to make the best decisions possible
with up-to-date useful information regarding the en-
vironment. The information contained in the knowl-
edge base is the following:
• The current state of the game.
• The moves played during the course of the game
by each player.
• The current player goals for the game and their
importance.
• The lists of deals confirmed, completed and pro-
posed by itself and other players over the course
of the game.
A Generic Agent Architecture for Cooperative Multi-agent Games
109

• The player’s current disposition towards other
players, such as who are its allies and enemies.
• The opponent models for each other player.
• The general trustworthiness levels of each player.
• The trustworthiness levels of each deal.
Additionally, the PR also has a set of personality
traits that can be defined depending on the game be-
ing played. These govern the general strategy of the
PR, such as how aggressive it is, how trusting of other
players it is or how prone to taking risks it is. Finally,
the PR also keeps lists of moves and deals suggested
by the other modules, which the PR can then choose
to execute depending of several factors.
When defining the PR module the developer must
define what constitutes a deal, a move and a goal be-
cause these are game-specific concepts that are diffi-
cult to generalize. Different games (such as Diplo-
macy and Werewolves of Miller’s Hollow) have very
different possibilities for what moves and deals a
player can make. These definitions specify the game-
specific elements that are stored in the knowledge
base and used by all modules.
One important role of the President is deciding
what overall goals the agent is striving for and the
relative importance to attribute to each goal. This in-
formation is then used to inform the behavior of other
modules, such as what moves are suggested by the
Strategy Office or what deals are accepted by the For-
eign Office. This allows the PR to dictate the over-
all strategy it wants to follow to its subordinate mod-
ules, allowing them to focus on the individual details
of what actions are more likely to result in attaining
these goals.
Different PR modules allow the developer to cus-
tomize the agent’s general strategy and personality al-
lowing for different player archetypes (Ferreira et al.,
2015).
3.1.2 The Strategy Office
The Strategy Office (SO) has the purpose of analyzing
the strategical situation of the game and suggesting
good moves to the PR. It contains most of the game-
specific heuristics, evaluating the utility of possible
moves and deals, and as such is highly dependent and
adapted to the specific game being played. In addi-
tion, the SO also defines the search strategy used to
explore the space of different moves.
This module is generally separated into two parts:
the search strategy used when looking for moves to
analyze and the evaluation function used for calculat-
ing the utility value of moves and deals. While the
search strategy used can generally be applied to dif-
ferent environments relatively easily, the tactical eval-
uation is, in general, entirely dependent on the game
being played, as it relies on specific knowledge about
the game’s rules in order to calculate what constitute
good moves.
In order to find the best moves, the SO has ac-
cess to the PR’s knowledge base, being able to make
use of the information contained there to evaluate the
utility of different moves and deals. When the PR re-
quests move suggestions, the SO finds good moves
and suggests them back to the PR, who stores them in
its internal list.
Swapping the Strategic Office allows a devel-
oper the choice among different search strategies and
heuristics for the game, which can have a major im-
pact on a player’s effectiveness.
3.1.3 The Foreign Office
The Foreign Office (FO) has the purpose of manag-
ing any interaction with other players and negotiat-
ing deals and coalitions in a way that best allows the
PR to execute the moves it is considering in order
to fulfill its goals. When the PR requests the FO to
negotiate with other players, it sends a list of which
moves it is considering, for which the FO should at-
tempt to find supporting deals. Using this information
as well as any other information available in the PR’s
knowledge base that the FO finds useful, this module
then autonomously communicates with other players
and decides what deals to propose, reject and accept.
When a deal is proposed, confirmed or completed the
FO informs the PR so that it can add these deals to the
appropriate lists in the Knowledge Base.
The negotiation strategy used is defined in this
module and determines what deals are proposed and
accepted and what concessions the agent is willing to
make. This module also defines the negotiation proto-
col used by the agent when communicating with other
players. The decision of what protocol to use is of-
ten dependent on the game being played or even the
specific development framework on top of which the
agent is being implemented.
Swapping the FO allows a developer to customize
the negotiation capabilities of the agent, allowing the
use of different negotiation and concession strategies,
or even removing the FO altogether for an agent with
no negotiation capabilities.
3.1.4 The Intelligence Office
The Intelligence Office (IO) is in charge of calculating
the trust values and opponent models for the different
players in the game.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
110

This module is divided into two parts: the op-
ponent modeling function and the trust reasoning
function. The opponent modeling function outputs
the predicted goals and their relative importance for
each opponent, to be updated in the PR’s knowledge
base. How this is done is often specific to each game
since the goals themselves as well as the actions and
deals being analyzed are also specific to each game.
The trust reasoning function is similar, outputting the
trustworthiness values both for each opponent as well
as for each individual deal, depending on how likely
they are to be kept.
Different IOs can allow the developer to cus-
tomize the opponent modeling and trust reasoning
strategies, or lack thereof, of an agent. This module
is especially useful in conjunction with the FO, since
negotiations are likely to benefit from a good oppo-
nent model and accurate trust reasoning.
3.2 Alpha Framework
In order to simplify the application of the Alpha archi-
tecture, we developed a framework composed of sev-
eral abstract classes which represent the modules and
behavior described. These classes define what each
module should do as well as the data available and
how it is updated and communicated to and by each
of the modules. Each module is defined in its own
class and implements a specific interface.
In practice all a developer has to do to create an
agent for a given domain is to implement the abstract
classes of the modules he wishes to use. When imple-
menting the modules, the developer must implement
their abstract methods in order to define the domain
specific negotiation strategies, protocols, heuristics,
models and message handling. The data produced
by the different modules is automatically updated and
available for use by all modules for their calculations.
Additionally, the developer must also implement
the data classes with the domain specific definitions
of what a move, a deal, a goal and an opponent are.
The different modules can then be attached to the PR,
so that an agent can be instantiated to play the game.
4 THE ALPHA ARCHITECTURE
IN PRACTICE
In this section we describe the details of the imple-
mentation of two different agents using the proposed
Alpha architecture, for two very different coopera-
tive negotiation games: Diplomacy and Werewolves
of Miller’s Hollow. These two games were chosen as
a proof of concept to test the Alpha architecture due to
the very different characteristics and challenges they
offer as well as the wide breadth of existing work for
the game Diplomacy.
4.1 AlphaDip
AlphaDip is a Diplomacy playing agent heavily based
on D-Brane, using a modified version of its strategic
module as well as the NB
3
algorithm to search for
the best moves. It has a few key improvements com-
pared with D-Brane, the most notable ones being an
improved strategic module, a defined strategy for ne-
gotiating coalitions and some ability to predict its op-
ponents’ goals and trustworthiness.
In the context of AlphaDip, a move is considered a
set of orders, one for each unit the player controls, as
well as possible supporting orders from other players
that may be necessary. The representation of player
goals is relatively simple. Since in Diplomacy, the
goal of the game is to capture as many supply cen-
ters as possible to win the game, a player’s goals are
simply a measure of how much they want to control
a certain supply center at the moment. This is repre-
sented by a positive real number, where 0 means no
intention to control a supply center, 1 means neutral
intention to control a supply center and values above
that meaning greater intentions of controlling a supply
center. On the other hand,the trust values for players
stored by the PR are positive real numbers that are
inversely proportional to the trustworthiness of these
players. This means that 0 represents full trust in a
player, 1 represents neutral trust and values above that
meaning lower levels of trust in a player.
When a round starts the PR first asks the SO for a
fallback move that is expected to work even without
any supporting deals with other players or any kind of
negotiation. This move will be used by the PR in the
eventuality that all negotiations fail, or in the absence
of a FO. The PR then asks periodically the SO, who
continually searches for the best moves, for suggested
moves to consider.
AlphaDip’s SO tries to find moves that maximize
the number of controlled supply centers by the player,
and is based on D-Brane’s strategic module and the
NB
3
algorithm. The objective of the game is to take
control of as many supply centers as possible. As
such, one way of determining the utility of a move
is simply the number of supply centers that are en-
sured to be controlled by a player when it plays that
move. This is the method used by D-Brane to calcu-
late the utility of a move. AlphaDip calculates utility
in a similar way, but introduces trust reasoning and
the prediction of opponent goals in order to attempt
to obtain a more accurate value than D-Brane. While
A Generic Agent Architecture for Cooperative Multi-agent Games
111

D-Brane attributes the same score of 1 to every sup-
ply center, AlphaDip uses the player goals to influ-
ence the value of each supply center. Additionally, if
a move requires supporting orders from other players
to succeed, their trust values are taken into account
when determining the utility value. This is so that SO
suggests moves that are likely to be easy for the FO to
obtain any necessary supporting move commitments
from other players. Equation 1 shows how the SO
determines the utility of a move.
U
p
(m) =
n
∑
i=1
I
m
(i) × g
p
(i)
t
p
(m)
(1)
Where U
p
(m) is the utility value of move m for
player p, n is the total number of supply centers, I
m
is a function where for each supply center it returns
1 if that supply center is sure to be controlled after
move m and 0 if not, g
p
is the goal value that player p
has or is assumed to have for each supply center, and
t
p
is the average trust that player p has on all other
players involved in the move or 1 if no other players
are involved.
The suggested moves may include order commit-
ments by other players in order to be feasible and so
the PR passes the current best move it is consider-
ing on to the FO for it to negotiate any possible sup-
port deals. AlphaDip’s FO performs two types of ne-
gotiation: coalition establishment with other players
and order commitments for the current round. This
is an improvement on D-Brane, which did not have
a strategy for the establishment of coalitions, instead
assuming that all D-Branes simply formed a coalition
against all other players in the game. Currently, Al-
phaDip is not able to negotiate move commitments
for the following rounds as that would increase the
complexity of the agent tremendously.
The strategy employed to negotiate coalitions is
similar to the strategy used by DipBlue. Like Dip-
Blue, at the start of the game AlphaDip proposes a
peace agreement to every other player in the game.
After that, during the rest of the game the FO attempts
to propose alliances against the stronger player in the
game with which it is not in peace with. If a player’s
trust value rises above a certain threshold (meaning
the player is less trusted) the peace with that player
is broken. Conversely, if the trust value drops be-
low a certain level (meaning the player is trusted) Al-
phaDip proposes peace to this player. Additionally,
if the game has 4 or less players remaining AlphaDip
immediately breaks any alliances it has with a player
if that player controls 14 or more supply centers. This
is so that AlphaDip does not let a player get too close
to winning in the final stages of the game.
The FO also attempts to negotiate joint order com-
mitments for the current round. The PR periodically
asks the FO to negotiate deals concerning the moves
being currently considered by the PR. Each time this
happens, the FO compares the utility of the suggested
moves with the utility of each of the proposals it re-
ceived and either accepts the best proposal received
if it has more utility, or proposes any necessary joint
order commitments required by the moves proposed
by the PR.
If the FO receives a proposal from another player
and it is compatible with any deals it has already ac-
cepted, it asks the SO to calculate the utility of that
deal, and informs the President for it to store it in the
proposed deals list of the knowledge base for later
consideration. The reason it does not choose to im-
mediately accept or reject the proposal, as explained
in (de Jonge, 2015), is so that the SO is given some
time to continue searching and looking for any pos-
sibly better options for other joint moves, before the
agent commits to the proposed orders. By commit-
ting to an offer and adding it to the PR’s confirmed
deals list, the search performed by the SO is automat-
ically constrained to only look for moves that satisfy
the conditions in the accepted deals.
Finally, after a certain negotiation deadline has
passed and depending on whether the FO managed
to negotiate any supporting moves deemed necessary,
the PR picks the best move suggested to it that has a
chance to succeed.
AlphaDip may also use the IO to calculate trust
values for players and predict their current goals in
the game. In order to update the trust values, the
IO uses a strategy similar to DipBlue (Ferreira et al.,
2015), where trust in players increases steadily over
the course of the game if no aggressive actions are
taken by these players and decreases when aggressive
actions are taken. The amounts by which the trust
score increases and decreases are dependent on the
current trust value the players have, as well as whether
AlphaDip considers himself to be at peace or at war
with these players. This way, if a player is highly
trusted or in peace with AlphaDip, any aggressive ac-
tions it takes will have a bigger impact on that player’s
trust. On the other hand, if a player is not trusted or is
at war with AlphaDip, any aggressive actions it takes
have a smaller impact on that player’s trust, since Al-
phaDip already expects that player to take aggressive
actions.
The IO also attempts to predict its opponent’s
goals, that is, which supply centers it believes each
player wants to control more, using a simple strategy
exemplified in Algorithm 1. Each time a player takes
an offensive action against a certain supply center, the
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
112

IO increases the likelihood that that player wants to
control that supply center (line 9 in algorithm 1). If
a player takes no offensive actions against a supply
center, or takes actions that would help another player
capture that supply center such as support orders, the
IO decreases the likelihood that the player wants to
control that supply center (lines 5 and 12). Like the
trust values, these increases and decreases are depen-
dent on the current values for each supply center. That
way if a player is already expected to want control of a
certain supply center any actions it takes have a small
impact on the value for that supply center. On the
other hand, if a player suddenly makes a move on a
supply center that AlphaDip believed that player was
not interested in, the value for that supply center will
be affected more significantly.
Algorithm 1: AlphaDip IO Goal Prediction Algorithm.
1: playerOpponents ← getOpponentsFromPR()
2: opponentGoals ← getOpponentGoalsFromPR()
3: for all op ∈ playerOpponents do
4: for all g ∈ opponentGoals[op] do
5: g ← g × 0.99
6: forActions ← getActionsSupportingGoal(op,g)
7: againstActions ← getActionsAgainstGoal(op,g)
8: for all o ∈ forActions do
9: g ← g +
0.04
g
10: end for
11: for all o ∈ againstActions do
12: g ← g × 0.95
13: end for
14: end for
15: end for
16: return opponentGoals
4.2 AlphaWolf
Werewolves of Miller’s Hollow was the second game
chosen to test the implementation of the Alpha ar-
chitecture. As there are, to the best of our knowl-
edge, no available frameworks for the development of
Werewolves of Miller’s Hollow agents, we have im-
plemented our own server using the JADE multi-agent
framework. We then implemented an agent capable of
communicating with this server and playing the game,
which we nicknamed AlphaWolf.
In order to simplify the implementation, and be-
cause certain roles are more suited to be played phys-
ically with humans, we use a simplified version of the
game with a subset of the available player roles and
abilities. In our version of the game there are 4 possi-
ble roles for the players: werewolves, villagers, seers
and doctors. Werewolves have the goal of killing
every other non-werewolf player in the game while
every other player has the goal of killing the were-
wolves. The werewolves, seers and doctors each have
a special ability that they can secretly perform during
the night phase of the game. Werewolves can col-
lectively vote on an enemy player to kill during the
night. The seers can choose any player to investigate
during the night, learning its secret role. Finally, the
doctors are able to choose a player, who if attacked by
the werewolves during the night will be healed and re-
main in the game, informing the doctor that this hap-
pened.
The AlphaWolf’s PR works much the same as de-
scribed in Section 3. At the start of each phase of
the game it requests the IO to update it’s opponents’
trust values and predicted goals. In the context of this
game a player’s goal is tied to its role and as such pre-
dicting a player’s goal means predicting the likeliness
that a player has a certain role. In the PR’s knowl-
edge base this means that each player is attributed
a role certainty for each role, from 0 to 100%. The
sum of all role certainties totals 100%, so that if a cer-
tain role has a certainty of 100%, the PR knows that
player’s role and consequently, its goals. A player’s
trust is represented by a positive real number, where 1
means neutral trustworthiness, 0 means no trustwor-
thiness and values above 1 mean progressively higher
trustworthiness.
Afterwards, the PR requests the SO to suggest a
good move. What constitutes a move in this context
is dependent on the current phase of the game but it
always involves choosing a player, to either vote out
of the game or as a target for the player’s ability dur-
ing the night phase. After a player is suggested by the
SO, and depending on whether the current phase of
the game allows negotiation between the players, the
PR may ask the FO to attempt to negotiate with the
other players for joint votes against some player or re-
quests for investigation or healing. When the FO has
finished negotiating, the PR decides to either vote or
target a certain player for its special action. If no deal
has been reached the player is randomly chosen from
the list of players suggested by the SO, with players
with higher utility being more likely to be picked, oth-
erwise if a deal has been reached for a different player,
the PR will take the action it agreed to on the deal.
The SO implements a simple strategy to suggest
good potential players to either attempt to eliminate or
protect, depending on the current phase of the game
and the player’s role and goals. The way it does this
is by attributing to each player a threat score, which
is a measure of what roles and goals the player be-
lieves an opponent to have (calculated by the IO) and
how dangerous these roles are to the player. In gen-
eral terms, if a player is on the werewolf faction, roles
that have the ability to gather more information or use
abilities that hinder the werewolves’ actions will have
A Generic Agent Architecture for Cooperative Multi-agent Games
113

a higher threat level to the player. In the same way, if
a player is on the villager faction, roles that have the
ability to gather more information or hinder the were-
wolves are less likely try to kill the player, and thus
are less threatening. Then depending on the current
phase of the game and whether the actions available
to the player will hinder an opponent, such as voting
to kill it, or help another player, such as healing it, ei-
ther this threat score is used as the utility for the move
or its inverse is used, respectively.
Equation 2 shows how the threat value of a player
is calculated.
T
p
=
n
∑
i=1
B
i
×C
i
n
∑
i=1
B
i
(2)
Where T
p
is player p’s threat value, n is the num-
ber of different possible roles a player can be, B
i
is
the base threat value for role i and C
i
is the current
certainty that player p has role i.
The SO also has the purpose of calculating the
utility of deal proposals. This utility is based on the
previously mentioned threat value of the proposer of
the deal, the threat value of the player whom the deal
concerns, what type of action the deal is proposing
and the trust of the player in the proposer of the deal.
This calculation is described in Algorithm 2. The type
of action proposed and the threat values for the pro-
poser and the player affected by the proposal are used
to calculate two values, one for the proposer and one
for the target of the proposed action, representing how
much the player is willing to help the proposer and
hurt the target. These two values are then multiplied
together with the trust on the proposer, representing
how much the player trusts the proposer to abide by
the deal and not take any actions against him, to reach
the final utility value for the deal (line 9).
Algorithm 2: AlphaWolf SO Deal Utility Calculation.
1: target ← getTargetFromDeal()
2: proposer ← getProposerFromDeal()
3: proposerValue ←
1
getT hreatValue(proposer)
4: if dealActionIsPositive() then
5: targetValue ←
1
getT hreatValue(target)
6: else
7: targetValue ← getThreatValue(target)
8: end if
9: return targetValue × proposerValue × getTrust-
FromPR(proposer)
In Werewolves of Miller’s Hollow the players can
only communicate during certain phases of the game,
namely the discussion phase and, for werewolves, the
night phase. As the game is very reliant on communi-
cation between players negotiation is very important
in order to obtain effective players. Otherwise play-
ers would not be able to coordinate their votes or use
their abilities during the night. This is the purpose of
the FO.
AlphaWolf’s FO implements a simple negotia-
tion strategy where each player proposes a joint vote
against another player who they think is the most
threatening, as well as other agreements such as in-
vestigation or heal requests depending on their lev-
els of trust with other players. Players then await for
confirmations from their opponents that they’ll follow
the agreement, locking the agreement in place if they
receive a confirmation. Each negotiation round play-
ers compare the utility of the proposals they received
with their concession value, which is based on their
own proposal and decreases over time, and decide ei-
ther to continue waiting or accept another proposal,
retracting their own.
AlphaWolf’s IO has the function of attempting to
predict a player’s goals and its trustworthiness. As de-
scribed previously, since a player’s goals are tied to its
role in the game predicting its goals is a matter of pre-
dicting its role. In order to predict an opponent’s role
the IO analyses the proposals and votes of that player
over the course of the game. The predicted role cer-
tainties for that opponent are thus a function of the
threat values of the players that that opponent voted
against, or proposed votes against, and the rounds in
which that player took those actions. Algorithm 3 de-
scribes the calculation for the prediction of opponent
goals by the IO.
The IO searches through each player’s past actions
and for each vote or proposal that that player made it
calculates a vote or proposal damage value (line 9 in
algorithm 3). This value indicates the likeliness that
an action was taken with the intent of damaging the
player’s faction and is based on the threat values of
the players who are the targets of that opponent’s ac-
tions. A high threat value for the target of the action
indicates that the action was not very damaging to Al-
phaWolf’s faction, and may have even been helpful,
and a low threat value indicates a damaging action,
as that opponent was voting against players that are
considered likely to be allies.
For each action its vote damage is then used to
calculate a scaling factor for each possible opponent
role (line 10) and that scaling factor is finally used to
scale the role certainties of each role proportionally
(lines 11-12). The reason each role has a different
scaling factor is because certain roles are more likely
to have more information than others. So seers have
a higher scaling factor than doctors, and doctors have
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
114

a higher scaling factor than villagers. In this way if
an opponent takes a damaging action, the likeliness
that it is a seer diminishes comparatively more than
the likeliness that it is a villager, since a seer would
be less likely to commit damaging actions against the
villagers, having more information about the player
roles. These scaling factors are then multiplied with
each current role certainty, and the values for the roles
are then re-scaled back so that they total 100% (line
14).
To calculate the trust values the IO analyses the
previous round and checks for each opponent if it kept
any agreements it accepted or if it voted against the
player. If an opponent broke an agreement or voted
against the player its trust value is decreased by a cer-
tain amount, otherwise its trust value increases.
Algorithm 3: AlphaWolf IO Role Prediction Calculation.
1: pastRounds ← getPastRoundsFromPR()
2: opponents ← getOpponentsFromPR()
3: opponentGoals ← getOpponentGoalsFromPR()
4: for all op ∈ opponents do
5: for all round ∈ pastRounds do
6: roundAgeFactor ← getAgeFactor(round)
7: for all actions ∈ getOpponentActions(op, round)
do
8: target ← getTarget(action)
9: voteDamage ←
getT hreatValue(target)
getAverageThreatValue()
×
roundAgeFactor
10: scalingFactors ← calculateRoleScalingFac-
tors(voteDamage)
11: for all r ∈ opponentGoals[op] do
12: r ← r× scalingFactors[r]
13: end for
14: normalizeOpponentGoals(opponentGoals[op])
15: end for
16: end for
17: end for
18: return opponentGoals
5 EXPERIMENTS AND RESULTS
This section describes the methodology and results of
the tests and experiments performed with the agents
implemented using the Alpha architecture.
5.1 AlphaDip Tests Configuration
The tests on AlphaDip were conducted using the
DipGame platform (Fabregues and Sierra, 2011). We
compared AlphaDip with two previously developed
Diplomacy playing agents, DumbBot and DipBlue
3
.
3
These were chosen mainly for their availability in the
DipGame platform.
In order to compare the performance of AlphaDip
with those agents we performed some of the same
tests reported in (Ferreira, 2014) and (de Jonge, 2015)
and compared our results with the results obtained
there. It should be noted that unlike the tests per-
formed using D-Brane in (de Jonge, 2015), which as-
sumed that the D-Branes always formed a coalition
against every other agent in the game, we allow our
agents to negotiate at will, establishing and breaking
coalitions.
In each of the experiments, we tested AlphaDip
using 3 distinct configurations, in order to separately
test the impact of negotiation and opponent and trust
modeling in its performance. The configurations used
were: an agent using only the PR and SO, an agent
adding to this the FO and, finally, an agent using all 4
modules: PR, SO, FO and IO.
For every configuration, in each experiment we
played a number of games of Diplomacy, stopping af-
ter 40 game phases. After a game had finished we
ordered the players by ranking, from 1st to 7th, and
collected the ranking results. Ranking is determined
by the number of supply centers that a player con-
trolled at the end of the game if that player was alive,
or by the game phase in which that player was elim-
inated otherwise. Players with more supply centers
or that were eliminated later than other players have a
higher rank in the game and are thus considered bet-
ter. For configurations without the FO (and thus, with
no negotiation capabilities) we played a total of 100
games. For configurations having the FO we set the
negotiation deadline at 15 seconds per round. Since
these tests take considerably longer to execute we
only played a total of 50 games per configuration in
these cases.
All tests and experiments were performed in a lap-
top computer with 8GB of RAM and an Intel Core
i5-6440HQ mobile CPU clocked at 3.5GHz.
5.2 AlphaDip Results
Like in Ferreira’s (Ferreira, 2014) and de
Jonge’s (de Jonge, 2015) works, who had two
instances of their agents play against 5 DumbBots,
we had two instances of AlphaDip play against 5
instances of DumbBot. Since we have two agents
playing in each game, the best possible average rank
for our agent in these tests is 1.5, while the worst
possible average rank is 6.5. By comparing the
average ranks of AlphaDip with the average ranks
of DipBlue and D-Brane we can determine how
well each agent performs comparatively against the
DumbBot. The best rank achieved by DipBlue in the
tests performed by Ferreira is 3.57 (Ferreira, 2014),
A Generic Agent Architecture for Cooperative Multi-agent Games
115
Table 1: The average rank of 2 AlphaDips when playing
with 5 DumbBots.
AlphaDip Config. Avg Rank
PR + SO 2.35 ± 0.15
PR + SO + FO 2.21 ± 0.21
PR + SO + FO + IO 2.11 ± 0.19
while the best rank obtained by D-Brane in the tests
performed by De Jonge is 2.35 (de Jonge, 2015).
Table 1 shows the average rank obtained by Al-
phaDip in each configuration and their standard de-
viations. These results show that AlphaDip plays
significantly better than the DumbBot and DipBlue,
even without having negotiation, opponent modeling
or trust modeling. However it also appears that the
inclusion of the IO and the FO only has a small effect
on the performance of the agent. A t-test performed
on the data from these tests obtains a value of 0.554
when comparing the results of the second test with
the last test, and a value of 0.109 when comparing
the first test with the last. This second value indicates
that the difference in the second case appears to be
statistically significant, though further testing would
be required to confirm the significance of the increase
in performance of the AlphaDips with all modules ac-
tive compared to those having just the PR and SO.
In order to complement the previous experiments
we also tested AlphaDip in an environment with a
higher number of negotiating agents, having 2 Al-
phaDips play with 2 DipBlues and 3 DumbBots. The
2 DipBlues played with the standard adviser config-
uration described in (Ferreira, 2014) in all tests. The
results for this experiment are shown in Table 2.
These results show that when the AlphaDips are
playing with just the PR and SO or with all modules
running they get a similar average rank between 2.3
and 2.4. A statistical t-test performed using the data
from these tests gives us a value of approximately
0.653, which shows that the difference observed is not
statistically significant. This indicates that the inclu-
sion of negotiation and trust reasoning does not sig-
nificantly affect the performance of the AlphaDips.
One exception is when they play with the FO but
without the IO, meaning that they negotiate without
making any attempt to predict their opponent’s goals
or trustworthiness, where their average ranking de-
creases significantly to 3.56.
This lack of impact from negotiation is similar to
the results obtained by De Jonge in (de Jonge, 2015),
where he concludes that even though the NB
3
algo-
rithm manages to find good joint moves for the play-
ers when they exist, the impact of these in the overall
result of the game is negligible. As such, negotiating
joint moves only for the current round is not enough
Table 2: The average rank of 2 AlphaDips when playing
with 2 DipBlues and 3 DumbBots.
AlphaDip Config. AlphaDips DipBlues
PR + SO 2.38 ± 0.16 5.03 ± 0.20
PR + SO + FO 3.56 ± 0.26 3.44 ± 0.32
PR + SO + FO + IO 2.3 ± 0.22 4.73 ± 0.29
to significantly increase the performance of the play-
ers – in order to obtain better results one would have
to attempt to negotiate further rounds ahead as well.
An interesting observation is that when playing
with the DipBlues, while the AlphaDips do obtain a
small increase in their average rank when all modules
are running compared to having just the PR and SO,
the DipBlues themselves are also benefited. The Dip-
Blues obtain a better average ranking of 4.73 when
playing with the AlphaDips with all modules active,
compared with an average ranking of 5.03 when play-
ing with AlphaDips incapable of negotiation. These
observations were also corroborated by De Jonge’s
observations in (de Jonge, 2015), where he found that
other agents could also benefit from the deals discov-
ered by agents running the NB
3
search algorithm.
5.3 AlphaWolf Tests Configuration
Tests were also run using the Werewolves of Miller’s
Hollow playing agent, AlphaWolf. Unfortunately,
due to the lack of any comparable agents developed
for this game, we were only able to test the relative
performance of our agent with different configura-
tions of active modules.
In order to test the effect of the different modules
on the performance of the agents we opted to have the
werewolves always playing with all modules running,
and changed only the configurations of any villager
agents in the different tests. This way we can eas-
ily see the effect that each module has on the perfor-
mance of the villagers. We tested 3 different config-
urations for this agent, just like with AlphaDip: just
the PR and the SO, all modules except the IO and all
modules active.
In each test we had the agents play 100 games
in a 10 player game where 2 of the players were
werewolves, and the remaining 8 were from the vil-
lager faction, with 1 seer, 1 doctor and the remain-
ing 6 being standard villagers. This ratio of were-
wolf players to villager players was chosen because it
is the recommended ratio for werewolves to villagers
in the official Werewolves of Miller’s Hollow rules.
We recorded the win percentage for the villagers over
those games as well as the average number of villager
agents left alive at the end of the game when the vil-
lager faction won.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
116

Table 3: The win percentages and average number of re-
maining villagers for a team of 8 villagers playing against 2
werewolves.
Villagers Config. Win % Avg # Villagers
PR + SO 27% 3.56
PR + SO + FO 46% 3.20
PR + SO + FO + IO 73% 4.88
5.4 AlphaWolf Results
Unlike with Diplomacy, the results for the AlphaWolf
agents, shown in Table 3, show that negotiation, trust
modeling and opponent modeling have a significant
impact on the effectiveness of the agents. With the
inclusion of the FO and the IO the performance of the
agents steadily increases from a 27% win ratio to a
46% win ratio, and finally a 73% win ratio with all
modules active. The inclusion of the IO also signif-
icantly increases the number of villagers remaining
alive in games where the villagers win. This means
that with the inclusion of trust and opponent modeling
the players are able to identify the werewolves much
earlier in the game, allowing for quicker victories.
One possible explanation for the difference in the
relative impact of negotiation, trust and opponent
modeling in the game of Werewolves of Miller’s Hol-
low compared with Diplomacy is that in the latter
the agents already implicitly have an idea of their
opponent’s goals. Since in Diplomacy the rules of
the game encourage players to capture supply cen-
ters, players can already play with the assumption that
other players will try to maximize their number of
supply centers over the course of the game. On the
other hand, in the game of Werewolves of Miller’s
Hollow players have no way to know at the start of
the game what their opponents will be trying to do.
This means that players have no way to predict an op-
ponent’s utility function at the start of the game, and
must analyze a player’s actions in order to predict it.
Negotiation may also have a greater impact in
Werewolves of Miller’s Hollow because each player
only has a single vote to affect the round. Without
coordination and organizing joint votes, players have
a hard time completing their goals. In Diplomacy
players can have differing numbers of supply centers
and units, which allows certain players to affect the
outcome of the rounds more than others; this means
strong players can use their superior strength to obtain
their objectives even without negotiation.
6 CONCLUSIONS AND FUTURE
WORK
The objectives of this work were the study of what el-
ements were necessary to create effective agents that
could play cooperative negotiation games, and devel-
opment of a generic architecture that included these
elements that could be used to facilitate the develop-
ment of effective agents for a wide variety of games.
We tested the proposed architecture by developing
agents for two very different cooperative negotiation
games and believe that the proposed Alpha architec-
ture is generic enough to be applied to many other
different games. The two most important agents de-
veloped using the Alpha architecture and framework
were AlphaDip and AlphaWolf. AlphaDip is an agent
with strategies inspired by D-Brane and DipBlue,
with the inclusion of opponent modeling to make pre-
dictions about an opponent’s intention to capture cer-
tain supply centers, as well as a negotiation strategy
for the establishment of coalitions, which was not
present in D-Brane. AlphaWolf is a Werewolves of
Miller’s Hollow agent that also includes negotiation,
trust and opponent modeling capabilities, allowing it
to predict its opponents’ roles and negotiate deals ac-
cordingly.
The results of the tests performed using these two
agents show that AlphaDip was in general superior to
both DipBlue and D-Brane, obtaining better average
ranks in the games played. However, the inclusion of
negotiation, trust reasoning and opponent modeling
capabilities did not have a very large impact on the
performance of the agent. The results obtained for
AlphaWolf show that the inclusion of the Foreign Of-
fice and Intelligence Office had a larger impact in the
performance of the agent. This indicates that negotia-
tion, trust and opponent modeling are more important
in Werewolves of Miller’s Hollow than in Diplomacy.
We believe that these results are positive and the
inclusion of negotiation, trust reasoning and opponent
modeling capabilities generally improved the perfor-
mance of the agents, though the impact was much
greater for AlphaWolf than for AlphaDip. We also be-
lieve that the developed architecture and framework
are a helpful contribution to the field by facilitating
the development of agents with these capabilities.
However, while the developed architecture is very
modular and allows agents to be built upon it and
make use of negotiation, trust and opponent model-
ing, there is still room for improvement. The Al-
pha architecture allows developers to define the dif-
ferent strategies for negotiation, trust reasoning and
opponent modeling that they want to use depending
on the specific game, such as D-Brane’s NB
3
algo-
A Generic Agent Architecture for Cooperative Multi-agent Games
117

rithm. However, this process can be made simpler
by the inclusion of generic strategies that can be ap-
plied equally to any environment. The inclusion of a
generic way to predict opponent goals and strategies,
calculate trust values and decide what deals to accept,
based on the knowledge base of the President, would
simplify the process of developing an efficient agent
even more.
An even larger step in obtaining a truly generic
system would be the inclusion of some form of ab-
stract understanding about the rules of the game being
played and the board state, which could be defined by
the developer using a formal language such as the one
used in the Zillions Of Games software (Corporation,
2016) or in the General Game Playing project (Gene-
sereth et al., 2005). With this capability it would be
possible to have a system that could generate agents
able to play and negotiate in many different types of
negotiation games, by simply providing it with a file
containing an abstract description of the game.
The agents implemented during the course of this
work, while generally efficient, could also be im-
proved. One major improvement to AlphaDip could
be to allow the agent to search for and negotiate move-
ment commitments for several rounds ahead instead
of only the current round. In the case of AlphaWolf
and the Werewolves of Miller’s Hollow server imple-
mented, a key improvement would be the capability
for AlphaWolf to use strategies involving bluffing, by
for example making opponents believe it has a differ-
ent role than its true role, a strategy human players
frequently use in the game. If correctly implemented,
this ability could make AlphaWolf much more effec-
tive, especially when playing with human opponents.
ACKNOWLEDGEMENTS
We wish to thank Andr
´
e Ferreira and Dave de Jonge
for their previous work in this area, upon which our
work is based, as well as always being available to
talk and help whenever we needed.
REFERENCES
Calhamer, A. B. (2000). The Rules of Diplomacy. Avalon
Hill, 4th edition.
Corporation, Z. D. (2016). Zillions of Games.
http://www.zillions-of-games.com/. Accessed: 23-11-
2016.
de Jonge, D. (2015). Negotiations over Large Agree-
ment Spaces. Phd thesis, Universitat Auton
`
oma de
Barcelona.
des Palli
`
eres, P. and Marly, H. (2009). Werewolves of
Miller’s Hollow: The Village. Lui-m
ˆ
eme.
Drogoul, A. (1995). When ants play chess (or can strate-
gies emerge from tactical behaviours?). In Castel-
franchi, C. and M
¨
uller, J.-P., editors, From Reaction to
Cognition: 5th European Workshop on Modelling Au-
tonomous Agents in a Multi-Agent World, MAAMAW
’93 Neuch
ˆ
atel, Switzerland, August 25–27, 1993 Se-
lected Papers, pages 11–27. Springer.
Fabregues, A. and Sierra, C. (2011). DipGame: A challeng-
ing negotiation testbed. Engineering Applications of
Artificial Intelligence, 24(7):1137–1146.
Ferreira, A. (2014). Dipblue: a diplomacy agent with strate-
gic and trust reasoning. Master thesis, Universidade
do Porto.
Ferreira, A., Lopes Cardoso, H., and Reis, L. P. (2015).
Strategic negotiation and trust in diplomacy – the dip-
blue approach. In Nguyen, N. T., Kowalczyk, R., Du-
val, B., van den Herik, J., Loiseau, S., and Filipe, J.,
editors, Transactions on Computational Collective In-
telligence XX, pages 179–200. Springer International
Publishing, Cham.
Genesereth, M., Love, N., and Pell, B. (2005). General
Game Playing: Overview of the AAAI Competition.
AI Magazine, 26(2):62–72.
Heinrich, J. and Silver, D. (2016). Deep reinforce-
ment learning from self-play in imperfect-information
games. In Proceedings of the Third Deep Reinforce-
ment Learning Workshop, NIPS-DRL.
Johansson, S. and Olsson, F. (2005). Mars – a multi-agent
system playing risk. In Proceedings of Pacific Rim
International Workshop on Multi-agents (PRIMA).
Johansson, S. J. and H
˚
a
˚
ard, F. (2005). Tactical Coordina-
tion in No-press Diplomacy. In Proceedings of the
Fourth International Joint Conference on Autonomous
Agents and Multiagent Systems, AAMAS ’05, pages
423–430, New York, NY, USA. ACM.
Kraus, S., Gan, R., and Lehmann, D. (1995). Designing and
Building a Negotiating Automated Agent. Computa-
tional Intelligence, 11(972):132–171.
Kraus, S., Lehmann, D., and Ephrati, E. (1989). An auto-
mated diplomacy player. In Levy, D. and Beal, D.,
editors, Heuristic Programming in Artificial Intelli-
gence: The 1st Computer Olympiad, pages 136–153.
Ellis Horwood Limited, Chinester, UK.
Nash, J. (1951). Non-Cooperative Games. The Annals of
Mathematics, 54(2):286–295.
Norman, D. (2013). David Norman’s DumbBot.
http://www.daide.org.uk/index.php?title=DumbBot
Algorithm. Accessed: 12-07-2013.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
van den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., Dieleman, S.,
Grewe, D., Nham, J., Kalchbrenner, N., Sutskever, I.,
Lillicrap, T., Leach, M., Kavukcuoglu, K., Graepel,
T., and Hassabis, D. (2016). Mastering the game of
go with deep neural networks and tree search. Nature,
529:484–503.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
118
