
Optimized Non-visual Information for Deep Neural Network in Fighting
Game
Nguyen Duc Tang Tri, Vu Quang and Kokolo Ikeda
School of Information Science, JAIST, 1-1 Asahidai, 923-1292, Nomi, Ishikawa, Japan
Keywords:
Deep Learning, Fighting Game, Convolutional Neural Network.
Abstract:
Deep Learning has become most popular research topic because of its ability to learn from a huge amount of
data. In recent research such as Atari 2600 games, they show that Deep Convolutional Neural Network (Deep
CNN) can learn abstract information from pixel 2D data. After that, in VizDoom, we can also see the effect of
pixel 3D data in learning to play games. But in all the cases above, the games are perfect-information games,
and these images are available. For imperfect-information games, we do not have such bit-map and moreover,
if we want to optimize our model by using only important features, then will Deep CNN still work? In this
paper, we try to confirm that Deep CNN shows better performance than usual Neural Network (usual NN) in
modeling Game Agent. By grouping important features, we increase the accuracy of modeling strong AI from
25.58% with a usual neural network to 54.24% with our best CNN structure.
1 INTRODUCTION
Nowadays with the explosion of data, Deep Learning
has become one of the most popular research fields
with its efficient in modeling and learning from data.
When we talk about Deep Learning, it means we talk
about the neural network with many layers and their
structure (how neurons in one layer connect to the
ones in other layers). Based on the problem, we have
to choose the fittest structure to solve it. For example,
in image processing, for MNIST dataset-digit number
from ’0’ to ’9’ (Nielsen, 2015) and CIFAR 10-subset
of tiny image dataset (Krizhevsky et al., 2012), Deep
Convolutional Neural Network (Deep CNN) are cho-
sen and shows the good performance. In game infor-
matics, some video games which can be represented
as a bitmap (image) or some board games, Deep CNN
are also chosen as an effective approach. But the
question why does CNN work is still a mystery, some-
how when we group the neighborhood neuron to-
gether by a window and slide this window through
the image (we usually call it filter) we get better in-
formation about this image.
Even when DeepMind-Google published their re-
search (Atari 2600 games) and claimed that they suc-
ceeded in training Deep CNN as a network structure
with Q-learning algorithm, they only confirmed that
using a Deep CNN to represent a Q-function is bet-
ter than a usual Q-Learning (Mnih et al., 2015). After
that, Kapathy in his research with Pong-game (Karpa-
thy, 2016), proved a usual neural network (one input
layer, one hidden layer, and one output layer) can also
be trained by a more general algorithm called Policy
Gradient. There has been no work compare the per-
formance of Deep CNN and usual neural network in
case inputs are features instead of an image.
In this research, we do our experiment with the
fighting game and we select FightingICE, an environ-
ment developed and maintained by Intelligent Com-
puter Entertainment Lab, Ritsumeikan University (Lu
et al., 2013). In FightingICE environment, images of
the game are not available. Instead, AIs will receive
features such as hitpoint, energy level, or in-game po-
sitions as input. That information is necessary for our
experimental purposes. We want to verify the effec-
tiveness of position of features when they are used as
input in a convolutional neural network.
2 RELATED WORKS
In this section, we introduce related works using CNN
in modeling and training strong AI.
2.1 CNN in Modeling Strong AI
Modeling a strong AI is a difficult task because it
requires a huge dataset and careful optimization of
many parameters. The more actions that AI can per-
676
Duc Tang Tri N., Quang V. and Ikeda K.
Optimized Non-visual Information for Deep Neural Network in Fighting Game.
DOI: 10.5220/0006248106760680
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 676-680
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

form the more difficulty we get. In particular, in
the game Go, it seems impossible for researchers to
model and predict the next move of the opponent.
But, with Deep CNN, finally, researchers are suc-
ceeded in that hard task. Christopher Clark used
81,000 professional games dataset and an average net-
work structure (four convolutional layers, one fully-
connected layer) and he gets a good accuracy 41%
in predict the next move (Clark and Storkey, 2014).
After that, DeepMind even did the impossible work
when creating the strong AI AlphaGo that defeat the
human champion. In supervised learning step, Al-
phaGo used 13 layers, 30 million samples, training
by 200 GPUs in 2 weeks and get an amazing accu-
racy 57% (Silver et al., 2016).
2.2 CNN in Training AI via
Reinforcement Learning
The results in Atari 2600 games show that CNN
works quite well in 2D games. Taking an 84x84x4
color image as an input, the agent can learn to distin-
guish many different states. It also has the ability to
evaluate how good a state is by calculating a ’quality’
base on the pair state-action-value. As it is successful,
DeepMind even copyrights the algorithm as the name
Deep Q-Network.
After that, in research with Doom game, Micha
Kempka and his team confirm that CNN also works
well in 3D games. Using Deep Q Network, the agent
can be trained from an input image that contains depth
information, and it can clear many scenarios from
easy to hard smoothly (Kempka et al., 2016).
But, until now, there have no studies about using
features instead of pixel image for the input of Deep
CNN. The current hypothesis is that the relationship
of neighboring pixels contains high-level information
that can make our model better if we group them to-
gether by using a window.
3 GROUPING AND LOCATING
FEATURES IN CNN
In image processing, dividing a big image into many
sub-images is a common technique. For each sub-
image, we can extract some important local features.
This is the background knowledge for convolutional
neural network. By using a window slide from left
to right, from top to bottom through the image, CNN
can learn local information. Then, this information
is generalized in later layers to get a deeper under-
standing of the image. For example in Figure 1, CNN
can learn to distinguish the image of digit number ’0’
from other numbers by its curve.
Figure 1: A window is a small sub-image. A CNN can learn
the curve of digit number ’0’ by sliding the window through
the image.
However, in the fighting game, we have stand-
alone features which contain fixed information. For
example, ’hitpoint’ indicates the health of characters,
’energy’ indicates the ability to use special skills, ’dis-
tance’ may indicate safety level (the further the dis-
tance between our character and opponent’s, the safer
our character gets) etc. When we combine some of
these features, we can get rules that strongly effective
in decision making. For example, if we combine ’dis-
tance’ and ’energy’ we can get some rules like this:
throw energy, if distance > 300 & energy > 60
normal kick, if distance < 300 & energy < 60
hard kick, if distance < 300 & energy > 60
jump, otherwise
Figure 2: Player 2 (P2) is a rule-based AI, when all condi-
tions are satisfied, it throw a energy ball to player 1 (P1).
Such combinations as the example in Figure 2 are
very popular in rule-based AIs. If features have a
strong relationship, we can make strong rules, other-
wise, the rule becomes weaker. Imagine rules com-
bined ’energy’ and ’size of character’, this strange
combination would make the agent act clumsily.
Optimized Non-visual Information for Deep Neural Network in Fighting Game
677
We hypothesize that the connection between rel-
ative features in Fighting game is similar to the re-
lation of neighboring pixels in an image. The nearer
neighboring pixels have strong connections, while the
further neighboring pixels have weaker or no connec-
tion to others. If grouping pixels help to improve the
performance of modeling strong AI then grouping rel-
ative features could also work. Although usual neural
network has the ability to combine these features if
we use multiple layers, we can not control which fea-
ture would combine with others because all neurons
in one layer are fully-connected with next layer. In
those networks, strange connections like ’energy’ and
’size of character’ in the previous example are redun-
dant.
By using CNN, we can reduce the numbers of in-
effective connections, and put features that we need
to a group. This idea can be implemented simply by:
• Represent input feature as a grid
• Find some important features and put them in a
group by using a window
• When sliding the window, make sure the window
always contain such important feature. This leads
us to duplicate the important feature.
4 EXPERIMENTS
4.1 Dataset
We collect 560 games between top 3 players of Fight-
ing AI Competition in 2015. Each game contains
3 rounds, each round last 60 seconds, and there are
60 frames per second. In other words, we have
560x3x60x60 = 6,048,000 pairs of state-action. We
use 70% for training and 30% for validating. From
FightingICE environment, we get information from
our character and the opponent’s character such as
hitpoint, energy, the location of characters, size of
characters, etc. Totally, we have 15 features from our
character and 15 features from the opponent, then we
compute 5 more important relative features such as
distance, difference in hitpoint, difference in energy
and 2 relative positions. Using this dataset, we try to
model the next move of the top 3 strong AIs.
4.2 Experimental Setup and Results
Since FightingICE is written in Java, we have to write
a short description in Java to get the dataset and save
it in CSV format. After that, we build our neuron
networks in Python with supported from two famous
libraries: Numpy and Theano. We also use GPU
GTX970 to run experiments.
In the first experiment, we use a usual neural net-
work setting with 3 layers: one input layer, one hid-
den layer, and one output layer. The input layer has 35
neurons (because we have 35 features), hidden layer
has 100 neurons and output layer has 56 neurons (be-
cause our agent can perform 56 actions). Training this
network, we get a model which can archive an accu-
racy of 19.45% when predicting the next move. Tun-
ing the number of neuron in hidden layer, we get the
highest accuracy is 22.42%.
In the second experiment, we use a usual neu-
ral network setting with 4 layers: one input layer,
two hidden layers, and one output layer. This setting
based on the well-known fact that usual two hidden
layer networks have higher expressiveness than one
hidden layer. Training this network, we get a model
which can archive an accuracy of 25.38% (with 1000
neurons per hidden layer).
In the third experiment, we use a naive Deep CNN
setting: represent 35 features as a 5x7 grid input,
one convolutional layer with 20 filters size 2x2 stride
length 1, one fully-connected layer and one softmax
layer (Figure 3). Training this network, we get a
model which can archive an accuracy of 33.59%. It
is reasonable because the location of features are se-
lect at random. Some features which are grouped to-
gether may have strong relationships. As a result, our
model increased performance slightly compare with
usual NN in Table 1
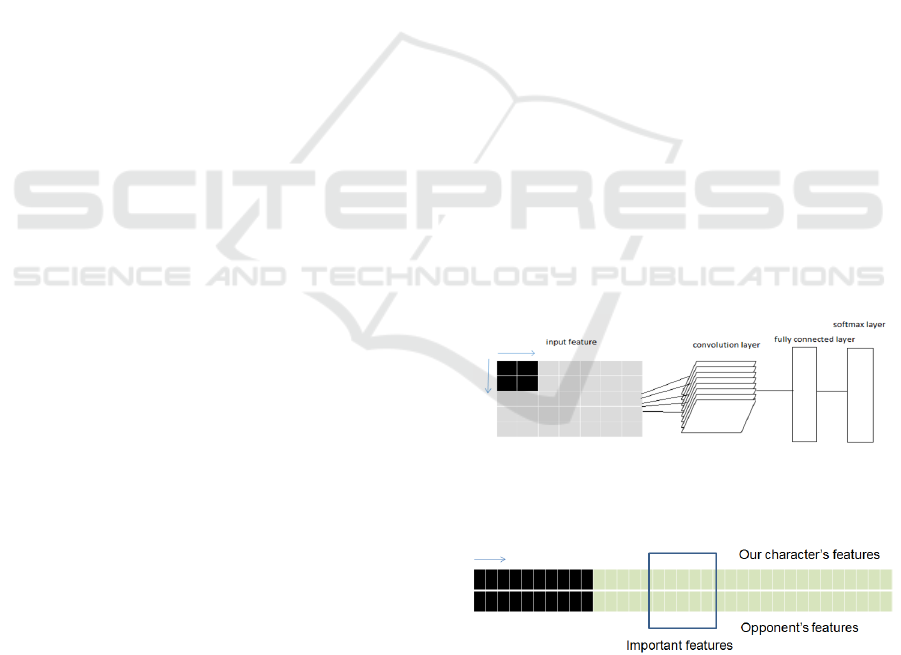
Figure 3: Naive CNN structure with 5x7 grid input, follow
by one convolutional layer, one fully-connected layer and
one softmax layer.
Figure 4: The structure of CNN in experiment 4. Infor-
mation of our character and opponent’s are separated: our
information is at the top row, opponent’s information is at
the bottom row.
In the fourth experiment, we improve our model
by separating information of our character and op-
ponent’s character (Figure 4). We duplicate all the
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
678
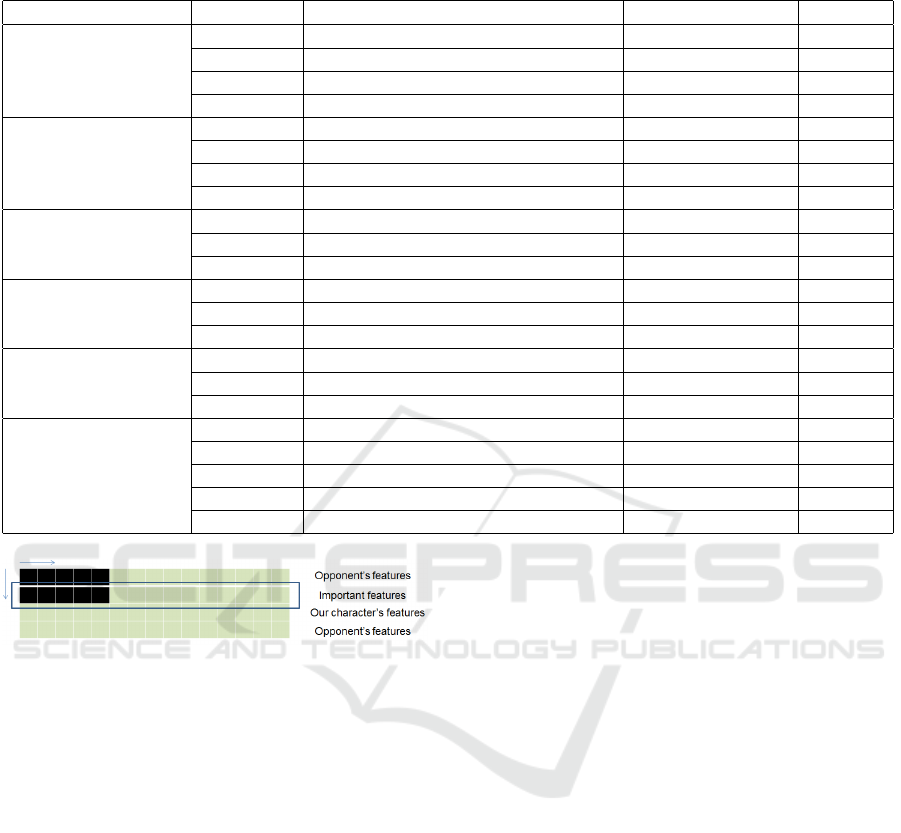
Table 1: Summary of our experimental results. The optimized CNN structure is clearly better than others and significantly
better than a usual neural network.
input structure training time (min) accuracy
usual NN one-layer
35 features 1 fully connected-100 neurons 26.61 19.45%
35 features 1 fully connected-200 neurons 30.91 18.80%
35 features 1 fully connected-400 neurons 45.24 20.86%
35 features 1 fully connected-1000 neurons 83.36 22.42%
usual NN two-layer
35 features 2 fully connected-100 neurons 36.92 20.97%
35 features 2 fully connected-200 neurons 48.68 22.08%
35 features 2 fully connected-400 neurons 51.32 23.38%
35 features 2 fully connected-1000 neurons 167.84 25.38%
naive CNN
5x7 grid 5 filters size 2x2-1 fully connected 54.08 29.39%
5x7 grid 10 filters size 2x2-1 fully connected 81.66 33.93%
5x7 grid 20 filters size 2x2-1 fully connected 123.65 33.59%
CNN with 2x35 grid
2x35 grid 5 filters size 2x10-1 fully connected 43.62 33.70%
2x35 grid 10 filters size 2x10-1 fully connected 54.76 38.32%
2x35 grid 20 filters size 2x10-1 fully connected 77.12 37.98%
optimized CNN
4x15 grid 5 filters size 2x5-1 fully connected 77.10 49.20%
4x15 grid 10 filters size 2x5-1 fully connected 116.16 54.14%
4x15 grid 20 filters size 2x5-1 fully connected 182.22 54.24%
CNN with 3x5 filter
3x15 grid 5 filters size 3x5-1 fully connected 44.58 46.29%
3x15 grid 10 filters size 3x5-1 fully connected 55.38 49.09%
4x15 grid 5 filters size 3x5-1 fully connected 61.5 46.22%
4x15 grid 10 filters size 3x5-1 fully connected 86.64 49.26%
4x15 grid 20 filters size 3x5-1 fully connected 150.16 49.95%
Figure 5: The input grid of the optimized CNN. Important
features are duplicated 2 times and put between information
of the 2 players. Opponent information is also duplicated
and put at the bottom of the input grid.
features, so we have total 70 features and represent
them as 2x35 grid input. The first row of the grid has
15 features from our character, 5 important features
and 15 features from our character again, in this or-
der. The second row has 15 features from opponent’s
character, 5 important features and 15 features from
opponent’s character again. We also use one convolu-
tional layer with 20 filters size 2x10 and stride length
1, one fully-connected layer and one softmax layer.
This setting lets the network compare the relationship
between our information and opponent’s information.
It also shows that the location of features in the input
grid has positive effects. When we sliding the window
from left to right, the same features of both characters
are accessible, allows the network to make compar-
isons between the states of the two characters. This
structure improves the performance of our model to
37.98%.
In the fifth experiment, the input grid is expanded
to preserve characteristic of the previous experiment
while adding new potential combination. We dupli-
cate 5 important features 2 times and the opponent’s
features 1 time. Totally, we have 60 features, which
were represented as a 4x15 grid input. Information of
our character and opponent’s character are also sep-
arated in different row and the duplicated opponent’s
features are put at the bottom of the input grid, so that
information of both characters can be combined sim-
ilar to previous experiment (Figure 5). We use one
convolutional layer with 20 filters size 2x5 and stride
length 1, one fully-connected layer and one softmax
layer. By using a 2x5 filter and duplicating the im-
portant features, it is possible for every filter in our
CNN to have access to all 5 important features in any
position in the input grid. This structure improves the
performance of our model significantly to 54.24%.
In the last experiment, we try to confirm that if a
bigger window can improve accuracy. First, we try a
3x15 grid input which contains the same information
as the 4x15 grid input in previous experiment without
the last duplicated row. Then, we paired it with a 3x5
filter which will capture information of our character,
opponent and mutual information at the same time.
However, the accuracy is reduced to 49.09%. Even
when we duplicate the opponent’s feature again, the
result is only slightly improved to 49.95%. Table 1
summarizes the result of our experiments.
Optimized Non-visual Information for Deep Neural Network in Fighting Game
679

5 CONCLUDING REMARKS
In this paper, we have described a method to success-
fully incorporate CNN with optimized non-visual in-
formation. Before, CNN was mostly used with visual
information such as images. Our method has shown
that non-visual features can also be used effectively
with CNN. By intentionally arrange features as an in-
put grid, with the same information, CNN achieves
54.24% accuracy when predicting the next moves of
AIs in the experiment. Meanwhile, the normal neural
network can only reach 25.38% accuracy. With the
promising result, we can expect CNN to be applied in
even more type of problems where visual or similar
information is not available.
Although in current experiments, we can model
strong AI with high accuracy of 54.24% but it’s not
enough to win other strong AI. In future work, we
will improve the network by a reinforcement learning
method such as via Policy Gradient methods.
ACKNOWLEDGEMENTS
We thank to ’Research Grants for JAIST Students
2016-2017’ for funding us in this work.
REFERENCES
Clark, C. and Storkey, A. (2014). Teaching deep convo-
lutional neural networks to play go. arXiv preprint
arXiv:1412.3409.
Karpathy, A. (2016). Deep reinforcement learning: Pong
from pixels. Technical report.
Kempka, M., Wydmuch, M., Runc, G., Toczek, J., and
Ja
´
skowski, W. (2016). Vizdoom: A doom-based ai
research platform for visual reinforcement learning.
arXiv preprint arXiv:1605.02097.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
Lu, F., Yamamoto, K., Nomura, L. H., Mizuno, S., Lee,
Y., and Thawonmas, R. (2013). Fighting game ar-
tificial intelligence competition platform. In 2013
IEEE 2nd Global Conference on Consumer Electron-
ics (GCCE), pages 320–323. IEEE.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Veness,
J., Bellemare, M. G., Graves, A., Riedmiller, M., Fid-
jeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning.
Nature, 518(7540):529–533.
Nielsen, M. (2015). Neural Networks and Deep Learning.
Determination Press.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the game of go with deep neural networks
and tree search. Nature, 529(7587):484–489.
APPENDIX
In this section, we show more details of our experi-
ments. Each character will be represented in our net-
work by 15 features:
• Hitpoint
• Energy
• Character’s size: width and height
• Character’s hitbox coordinates: left, right, bottom
and top
• Remaining frame of current action
• Type of current action
• Current speed of character: in x-axis and in y-axis
• Character’s current facing direction
• Character’s current state: can be controlled or not
• Information about projectiles in current state:
quantity and relative position to the character (in
front or behind)
The 5 important relative features:
• Distance between 2 characters
• Difference in hitpoint
• Difference in energy
• Difference of position in x-axis
• Difference of position in y-axis
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
680
