
Behavior Recognition in Mouse Videos using Contextual Features
Encoded by Spatial-temporal Stacked Fisher Vectors
Zheheng Jiang
1
, Danny Crookes
1
, Brian Desmond Green
2
, Shengping Zhang
3
and Huiyu Zhou
1
1
School of EEECS, Queen’s University Belfast, Belfast, U.K.
2
School of Biological Sciences, Queen’s University Belfast, Belfast, U.K.
3
School of Computer Science and Technology, Harbin Institute of Technology, Weihai, China
{zjiang01, d.crookes, b.green}@qub.ac.uk, shengping.zhang@gmail.com, h.zhou@ecit.qub.ac.uk
Keywords: Mouse Behavior Recognition, Spatial-temporal Stacked Fisher Vector, Gaussian Mixture Model, Contextual
Features, Spatio-temporal Interest Points.
Abstract: Manual measurement of mouse behavior is highly labor intensive and prone to error. This investigation aims
to efficiently and accurately recognize individual mouse behaviors in action videos and continuous videos. In
our system each mouse action video is expressed as the collection of a set of interest points. We extract both
appearance and contextual features from the interest points collected from the training datasets, and then
obtain two Gaussian Mixture Model (GMM) dictionaries for the visual and contextual features. The two
GMM dictionaries are leveraged by our spatial-temporal stacked Fisher Vector (FV) to represent each mouse
action video. A neural network is used to classify mouse action and finally applied to annotate continuous
video. The novelty of our proposed approach is: (i) our method exploits contextual features from spatio-
temporal interest points, leading to enhanced performance, (ii) we encode contextual features and then fuse
them with appearance features, and (iii) location information of a mouse is extracted from spatio-temporal
interest points to support mouse behavior recognition. We evaluate our method against the database of Jhuang
et al. (Jhuang et al., 2010) and the results show that our method outperforms several state-of-the-art
approaches.
1 INTRODUCTION
Mice are extensively employed in biomedical science
and their responses to disease or therapy are
frequently detected by measurement of their behavior
patterns. In most cases this monitoring is performed
manually using video recordings. Recording of
diverse behaviors of home-cage mice generates a
large amount of information for researchers (Steele et
al., 2007; Roughan et al., 2009) in pathology,
psychology, ethology, neuroscience and medicine.
However, manual annotation of mouse recordings is
a highly labor intensive process which is error-prone
and subject to individual interpretation. Furthermore,
human observers may fail to detect behavioral events
that are very quick or too slow, and humans may miss
events because of dwindling attention span.
In the literature some systems which automatical-
ly recognize animal behaviors have been described.
For instance, Rousseau et al. (Rousseau et al., 2000)
were the first to show that the detection of specific
behaviors was possible. They applied neural network
techniques to recognize 9 solitary rat behaviors from
body shape and position, recorded from the side-
view. However, their method of tracking the nose is
not sufficiently developed to draw conclusions
concerning its sensitivity and reliability. In 2005
Dollár et al. (Dollár et al., 2005) recognized mouse
behavior using the classification of sparse spatio-
temporal features. However, they only considered
visual features of the interest points (e.g. image
gradient) without the contextual information such as
the spatial relationship between different interest
points. In 2010 Jhuang et al. (Jhuang et al., 2010) used
background subtraction to get a subwindow of the
mouse in each frame from the side-view. From the
mouse subwindow, the features that they used were
generated based on a computational model of motion
processing in the human brain (Jhuang et al., 2007),
followed by classification using a Hidden Markov
Model Support Vector Machine (SVMHMM). Their
method to locate the mouse is dependent on a good
background model, which it turns out can be
problematic. Recently, Burgos-Artizzu et al. (Burgos-
Jiang, Z., Crookes, D., Green, B., Zhang, S. and Zhou, H.
Behavior Recognition in Mouse Videos using Contextual Features Encoded by Spatial-temporal Stacked Fisher Vectors.
DOI: 10.5220/0006244602590269
In Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2017), pages 259-269
ISBN: 978-989-758-222-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
259
Artizzu et al., 2012) created a system for recognizing
the social behavior of mice, both from the top and side
views. They applied AdaBoost with spatio-temporal
and trajectory features to classify mouse behaviors.
As with the method of Dollár et al. (Dollár et al.,
2005), this method also ignored the spatio-temporal
contextual features. Furthermore, their trajectory
features are based on a tracking algorithm which was
not detailed in their paper.
A common feature of all of the above studies is
that the location information of mice is computed by
tracking (Rousseau et al., 2000); (Burgos-Artizzu et
al., 2012) or detection (Jhuang et al., 2007)
algorithms. Also, their extracted features are derived
from studies of human behavior recognition, such as
spatio-temporal, trajectory and shape features. Low-
level local features have become popular in action
recognition due to their robustness to background
noise and independence of the detection and tracking
algorithms. Among these local features, spatio-
temporal interest points (Dollár et al., 2005); (Laptev,
2005) and Improved Dense Trajectories (IDT) (Wang
and Schmid, 2013); (Wang et al., 2015) are widely
used because of their ease of use and good
performance. Spatio-temporal interest points are used
by some systems (Dollár et al., 2005); (Laptev, 2005)
to extract visual features around interest points, but
contextual features also imply a large amount of
information about spatial location and temporal
changes of the mouse.
In our system, we propose to exploit contextual
features of interest points, which also potentially
describe mouse location without using an
independent tracking or detecting algorithm. These
features are then encoded as spatial-temporal stacked
Fisher vectors which are the input to the neural
network. The main contributions of this study are:
1. We improve upon the performance of Dollar’s
interest point detector especially under illumine-
tion using frame differencing and Laplacian of
Gaussian filtering.
2. We explore new contextual features from the
spatio-temporal interest points for behavior
recognition. It is the first attempt to encode this
contextual feature rather than simply concatenate
them after appearance features like (Jhuang et al.,
2010), (Burgos-Artizzu et al., 2012) and (Laptev,
2005). Our contextual features are an important
feature which can characterize both spatial loca-
tion and temporal changes in mice. We compute
the absolute and relative positions of each interest
point and then concatenate them to form the
contextual features.
3. We compute spatial-temporal stacked Fisher
vectors for both contextual and visual features that
help improve behavior recognition accuracy. We
generate two GMM dictionaries for contextu-al
and visual features respectively and then compute
spatial-temporal stacked Fisher vectors for each of
them.
4. We conduct a comprehensive evaluation of the
proposed algorithm, and compare it with several
state-of-the-art techniques.
Figure 1: The proposed framework.
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
260
2 FRAMEWORK OF OUR
APPROACH
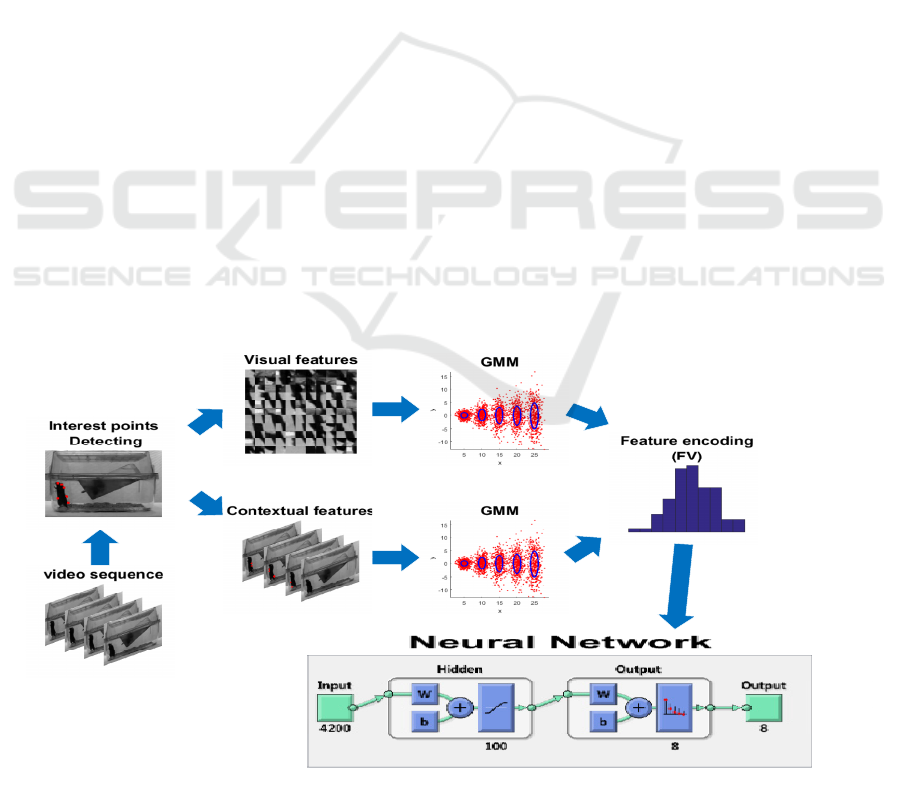
As shown in Fig. 1 the pipeline for our method
consists of five steps: (i) detection of interest points,
(ii) description of interest points, (iii) generation of
two Gaussian Mixture Model (GMM) dictionaries,
(iv) feature encoding with spatial-temporal stacked
Fisher vector (FV), and (v) classification with a
neural network (NN). In the following sections, we
will describe each step in more detail.
2.1 Detection of Interest Points
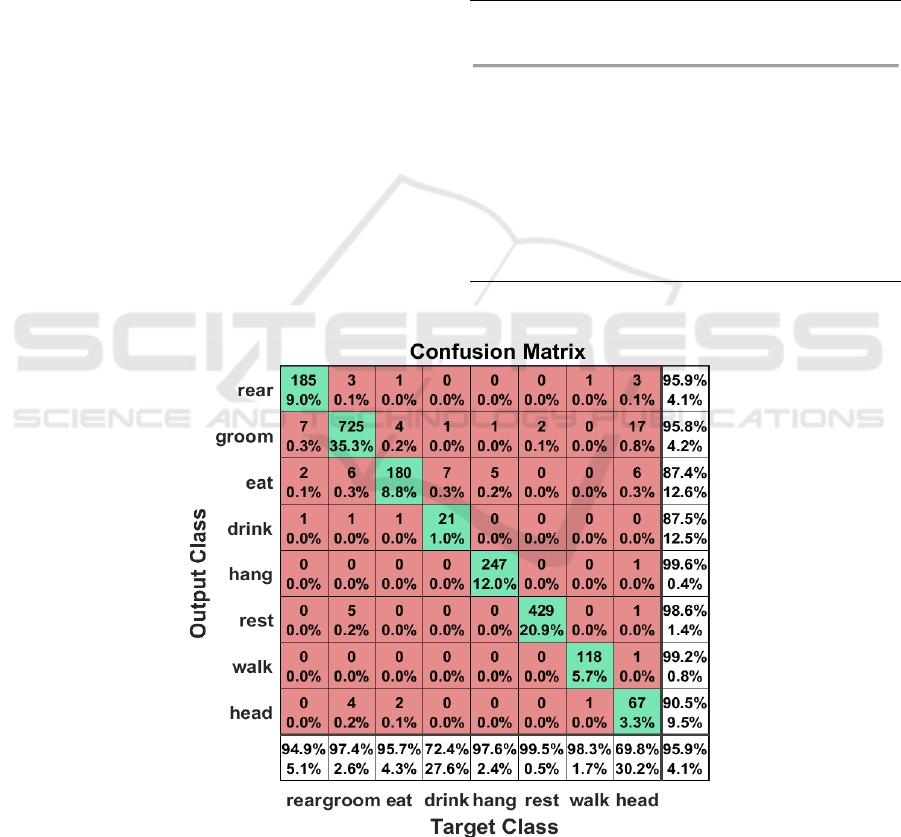
Interest points are local spatio-temporal features
considered to be salient or characteristic of the action
captured in a 3D spatio-temporal volume (see Fig. 2).
Spatio-temporal interest points are those points where
the local neighborhood has a significant variation in
both the spatial and the temporal domains. Laptev
(Laptev, 2005) extended the 2D Harris corner
detector to 3D. However the main drawback of this
method is the relatively small number of stable
interest points. Willems et al. (Willems et al., 2008)
identify saliency as the determinant of a 3D Hessian
matrix, which is faster and denser than Harris 3D but
less dense than Dollar’s detector. Another trend is to
use dense sampling (Wang and Schmid, 2013), which
extracts video blocks at regular positions and scales
in space and time. Obviously dense sampling is able
to produce many more interest points than the above
detector. However, it is more difficult to ensure that
all interest points are on the object. Among various
interest point detection methods, the one proposed by
Dollar et al. (Dollár et al., 2005) is perhaps the most
suitable for mouse action recognition. They calculate
a response function to locate interest points. Their
response function has the form:
∗∗
∗∗
(1)
Figure 2: Some examples of detected interest points
(depicted by red dots) in a 3D spatio-temporal volume.
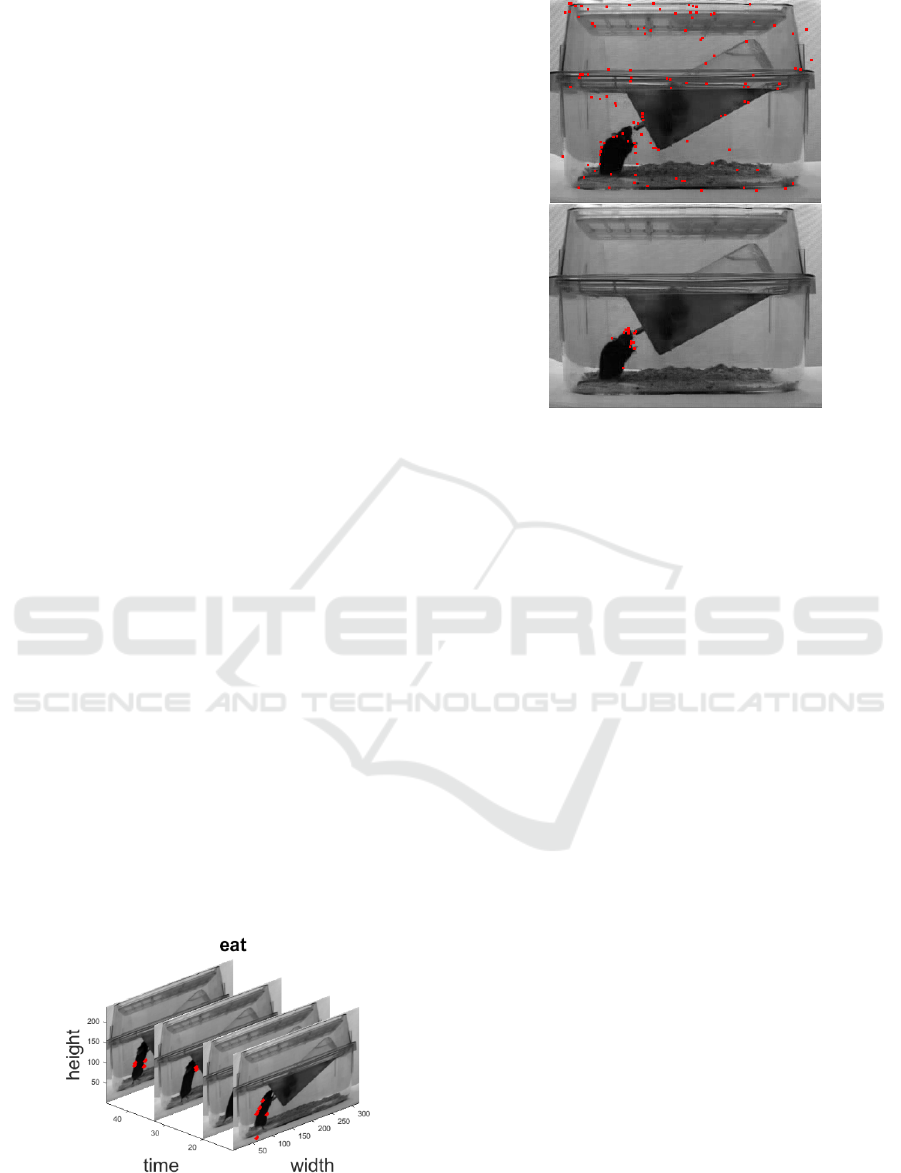
Figure 3: Comparison between interest points detected
using our detector (bottom) and the Dollar detector (top)
under illumination change.
where g is the 2D Gaussian smoothing kernel which
is applied only along the spatial dimensions, and
and
are a quadrature pair of 1D Gabor filters
applied temporally, defined as:
;,
/
, and
;,
/
.
Despite this method’s popularity, since it uses
solely local information within a small region, it is
prone to false detection under illumination variation;
it also tends to generate spurious interest points
around highly textured background areas. Some
drawbacks are highlighted in the examples in Fig. 3.
To overcome these shortcomings, we propose
here a different interest point detector. In particular,
although the 1-D Gabor filter applied in the temporal
domain is effective for capturing the dynamics of
actions, it is sensitive to both illumination and highly
textured background. To overcome this problem, the
proposed detector explores different filters for
detecting salient spatio-temporal interest points.
More specifically, our detector consists of two steps:
1) Laplacian of the Gaussian filtering in the spatial
domain replacing single Gaussian in Dollar et al.
(Dollár et al., 2005) for reducing the influence of
illumination and 2) frame differencing for eliminating
spurious interest points on the background. This two-
step approach facilitates saliency detection in both the
temporal and spatial domains to give a combined
filter response. Hence our response function has the
form:
∗∗∗
∗∗∗
(2)
Behavior Recognition in Mouse Videos using Contextual Features Encoded by Spatial-temporal Stacked Fisher Vectors
261

in which L is the operator of Laplace used on the
space. Due to introduction of the Laplace operator,
our interest points detector can effectively reduce the
influence of illumination, followed by frame
differencing for ensuring all interest points are on the
mouse. Fig. 3 also shows that, under the same
illumination change, our detector can extract more
precise interest points on the mouse.
2.2 Contextual and Visual Features
2.2.1 Spatio-temporal Contextual Feature
Extraction
Most existing mouse behavior recognition systems
(Jhuang et al., 2010; Rousseau et al., 2000; Burgos-
Artizzu et al., 2012) extract position features from
established trackers. However these tracking
algorithms do not seem to be very reliable. For
example, Jhuang et al. (Jhuang et al., 2010) used
background subtraction to get a subwindow of the
mouse in each frame, but their foreground detection
algorithm assumes the background is constant, which
cannot be guaranteed in a real experiment. Besides,
trajectory features extracted by Burgos-Artizzu et al.
(Burgos-Artizzu et al., 2012) are from their
undetailed tracking algorithm, and the mouse nose
tracking algorithm applied by Rousseau et al.
(Rousseau et al., 2000) seems insensitive and
unreliable. Unlike their approach, we propose a novel
method to extract contextual information from the
detected interest points, which also imply the location
of the mouse without using any extra mouse tracking
or detection algorithm.
Our spatio-temporal contextual information of
interest points is an important action representation,
because they characterize both spatial location and
temporal changes of the mouse. There are two types
of features that are computed: the relative position,
and absolute spatial position of interest points. The
position of each interest point in the 3D spatio-
temporal volume is represented by its XYT
coordinates. Fig. 2 intuitively shows the distribution
of interest points. Suppose there are R interest points
detected in an action video. In order to compute
relative positions, we firstly compute a center interest
point defined by:
;
;
∗
∑
;
;
,
where
;
;
and
;
;
represent the
coordinates of the center and the i
th
interest point
respectively in an action video. Consequently, the
relative position of interest points is represented by
the coordinates of R interest points relative to the
center interest point:
;
;
,,,…,.
Using relative position efficiently describes the
distribution in the 3D spatio-temporal volume,
because it concentrates on different behavior patterns
while ignoring outliers. The absolute spatial position
of each interest point is able to characterize the place
where the action happens (which can be important for
location-based behaviors such as drinking). To
capture this information, we concatenate the XY
coordinates to the relative position. Overall, the
contextual feature vector has the form:
;
;
;
;
,,,…,.
2.2.2 Spatio-temporal Visual Feature
Extraction
After detecting the interest points, we extract the
visual features (see Fig. 4) from the cuboids around
the interest points in the 3D spatio-temporal volume.
For simplicity, we extract the brightness gradients
with three channels (G_x, G_y, G_t) from each
cuboid and flatten the cuboid into a vector as (Dollár
et al., 2005). To eliminate noise and retain some
principle information, Principle Component Analysis
(PCA) is used to reduce the dimensionality of the
visual feature vector.
2.3 Generation of GMM Dictionaries
for Contextual and Visual Features
The aim of dictionary generation is to describe the
local feature space and provide a partition for local
descriptors (Peng et al. 2014). In some existing mouse
behavior systems (Dollár et al., 2005; Burgos-Artizzu
et al., 2012), a mouse action is modeled as a bag of
independent and unordered visual words; however,
the spatio-temporal contextual information of interest
points is ignored. In these approaches, the k-means
clustering algorithm is used to construct the
dictionary. In our work, instead of k-means, we use
Gaussian Mixture Model (GMM), which is a
probabilistic model to characterize the distribution of
the given feature space.
For each type of dictionary, we suppose a K-
component GMM, and each Gaussian k has the form
(
Perronnin et al. 2010):
|
|
(3)
where
and
aretheDdimensionofmean
vector and diagonal covariance matrix
respectively, ,,…,.ThentheGMMcanbe
definedas:
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
262

;
;
,
(4)
where
,
,
,,…, ,
is the
mixture weight of Gaussian
and subject to
∀
:
,
∑
.
Given the feature set
,…,
, we apply
the Expectation-Maximization (EM) algorithm to
optimize parameters of GMM, which is learned
through maximum likelihood (Bishop, 2006).
There are two benefits in our approach with two
dictionaries: (1) The two dictionaries consider both
contextual and visual features of interest points. (2)
Unlike k-means, GMM delivers not only the mean
information of code words, but also the shape of their
distribution.
2.4 Feature Encoding and Fusion
Feature encoding aims to leverage the dictionary to
integrate all local descriptors into a feature vector,
which can ensure all video clips have the same
dimension of feature vector, and efficiently improve
classification performance. Although feature enco-
ding and fusion are very important procedures in
mouse action recognition, related papers discussing
this are rare. For example, (Dollár et al., 2005) and
(Laptev, 2005) only use the traditional encoding
method of Vector Quantization. For feature fusion,
some existing mouse behavior recognition systems
(Jhuang et al., 2010; Rousseau et al., 2000; Burgos-
Artizzu et al., 2012) simply append positional featu-
res after appearance features without encoding. In our
opinion, appearance features and contextual features
are two different kinds of feature and vary in value
range. So it is more reasonable to encode them
separately. In recent evaluations (Peng et al., 2014;
Chatfield et al., 2011; Wang et al., 2009), the Fisher
Vector performs consistently better than bag of
features, where it is popular to encode features for
both image and video classification. We also apply
this encoding method and show that it can improve
the performance of our features as well (see section
4.1). Unlike bag of features, Fisher Vector leverages
GMM as its dictionary for encoding more information
than the mean of code words. It calculates the
gradient of the log-likelihood with respect to a
parameter of GMM, which can describe how that
parameter contributes to the process of generating a
particular example (Perronnin et al. 2010). Let
,n1… be the set of N descriptors of
interest points in an action video. Then this video can
be represented by the gradient vector of log likelihood
(Jaakkola et al. 1999):
;
(5)
where
;
∏
;
and is the
parameter of this function. This is a generative model
to characterize an action video with a gradient vector
derived from a probability density function. On the
basis of this generative model, Perronnin et al.
(
Perronnin et al. 2010) introduced the GMM to replace
the probability density function
;
and
developed an improved Fisher vector as follows:
,
(6)
,
(7)
where
has D dimensions and represents the
diagonal covariance matrices, i.e. the diagonal of
.
In other words,
,
and
,
are the D-dimensional
gradients with respect to the mean
and standard
deviation
of Gaussian k. Eqs. (6) and (7) are the
mathematical derivations of Eq. (4) replacing the
; of GMM. In addition,
is the weight
of
to the k
th
Gaussian:
;
,
∑
;
,
(8)
If we suppose there are K Gaussians and D
dimensions of a descriptor after performing PCA in
our system, then the Fisher vector is the concatenation
of
,
and
,
with a total of 2KD vector
dimensions, which describes how the parameters of
the generative model
;
should be modified to
better fit the data X.
Figure 4: Spatial-temporal stacking.
In our approach, as mentioned in section 2.2, we have
two GMM dictionaries, one for visual and the other
for contextual features, so we can compute two Fisher
vectors for both of them. Note that local sum-pooling,
which is in the form of (6) and (7), is agnostic to the
relative location of aggregated features. To capture
Behavior Recognition in Mouse Videos using Contextual Features Encoded by Spatial-temporal Stacked Fisher Vectors
263

the spatial-temporal structure within each feature’s
neighborhood, inspired by spatial stacking of
(Simonyan et al., 2013), we incorporate the stacking
sub-layer, which concatenates the spatial-temporal
adjacent features in the 2*2*2 cuboid which
encompasses all the detected interest points (Fig. 4).
After normalizing these spatial-temporal stacked
Fisher vector by power and L2 normalization, we fuse
contextual and appearance Fisher vectors to give the
input to the classifier. In particular, contextual and
appearance are complementary features, and they
jointly boost the performance of the classifier (see
Section 4.2).
2.5 Classification with a Neural
Network
In our study, the fusion FV of contextual and visual
features is the final feature vector which needs to be
classified. Although FV are designed to work well
with a linear classifier (because they correspond to
the explicit feature map of the Fisher Kernel), we still
wanted to understand whether FV classification could
be improved with non-linear classifiers. Perronnin et
al. (Perronnin et al., 2015) recently gave a positive
answer for image classification. In our experiment,
we also apply a non-linear classifier and find that a
combination of neural networks and Fisher vectors
can give better results than the conventional
combination of Fisher vector and linear support
vector machine (SVM). In our approach, a feed-
forward neural network was constructed with two
layers of sigmoid hidden neurons and softmax output
neurons. The feed-forward neural network allows the
one-way transmission of the data from input to
output. The hidden layer was fed with the fused and
normalized Fisher Vector of contextual and visual
features. In each layer, the input is weighted and
transformed by an activation function (sigmoid in the
hidden layer and softmax in the output layer) and is
then passed to the neurons in the next layer.
3 EXPERIMENTAL SETUP
3.1 Benchmark Experiment
To quantify the improvement obtained by our spatio-
temporal visual and contextual features, we compared
our method first to the state-of-the-art approach using
Trajectory Features proposed by Wang et al. (Wang
et al. 2015), because it has been a popular action
representation in recent years, albeit for human
behaviors.
3.1.1 Spatio-temporal Visual and
Contextual Features
The interest point detector used in this experiment
was proposed by Dollar et al. (Dollár et al., 2005). For
parameter setting, the spatial and temporal scale
parameters σ and τ are empirically set to 2 and 3,
respectively. After detecting the interest points, we
extract XYT relative and absolute locations of each
interest point. Afterwards we construct a visual
feature vector using brightness gradients from
cuboids, which are centered on the interest points and
have default size 13*13*19. To eliminate noise and
retain some principle information, Principle
Component Analysis (PCA) is then used to reduce the
dimensionality of visual feature vector by preserving
98% of the energy.
3.1.2 Trajectory Features
Improved Dense Trajectories (IDT) (Wang et al.,
2015) is another widely used local feature. This
approach densely samples points in each frame.
Tracking points are achieved using optical flow. We
used the default trajectory length of 15 frames. For
each trajectory, we computed descriptors of
Trajectory, HOG, HOF and MBH (Wang et al.,
2013). The Trajectory descriptor describes its shape
by a sequence of displacement vectors. The other
descriptors are computed in the spatio-temporal volu-
me aligned with the trajectory. HOG represents the
static appearance information by the orientation of
image gradients. Both HOF and MBH measure mo-
tion information, and are based on optical flow. HOF
directly quantizes the orientation of flow vectors.
MBH quantizes the derivatives by splitting the optical
flow into horizontal and vertical components. The
final dimensions of the descriptors are 30 for Traje-
ctory, 96 for HOG, 108 for HOF and 192 for MBH.
3.2 Feature Encoding and
Classification
To encode features, we compared bag of features and
Fisher vector. We used 1500 randomly sampled
features with k-means to train a codebook for each
descriptor type including HOG, HOF, MBH, spatio-
temporal visual and contextual features. The size of
the codebook is set to K=50. Unlike bag of features,
Fisher vector (Perronnin et al. 2010) encodes both
first and second order statistics between the video
descriptors and a Gaussian Mixture Model (GMM).
In order to estimate the GMM for each descriptor, we
randomly sample 1500 features from the training set
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
264

and set the number of Gaussians to K=20. Each
descriptor type has 2KD dimensional Fisher vector as
described in (Perronnin et al. 2010). To normalize a
Fisher vector, we apply power and L2 normalization
as in (Perronnin et al. 2010). Finally we concatenate
normalized Fisher vectors of different descriptor
types and compare the performance of different
combinations of them.
For classification, we use neural network (NN),
linear SVM, radial basis function SVM and K-nearest
neighbor (kNN) for comparing the performance of the
trajectory features with our spatio-temporal features.
For parameter settings of each classification method,
we fix the number of hidden nodes in NN to 100, use
a one-against-the-rest strategy for designing multi-
class classification of SVM and set K=1 in kNN. For
the other parameters, we follow the default setup in
Matlab. After the experiments, we choose the best
results as the evidence of the comparison and
analysis. In all experiments we divided all datasets
into two parts: half is used for training and half for
testing. Additionally, to evaluate our system on
continuous videos, we used leave-one-out procedure
on a frame-by-frame comparison with human ground
truth. During the leave-one-out procedure, all except
one video are used to train a neural network and the
trained neural network was used to test the one
remaining video. The procedure is repeated n times
for all videos and the average performance is reported.
3.3 Datasets
The Jhuang database (Jhuang et al., 2010) was used
for our experimental test. The first type of database
called the ‘clipped database’ contains 4200 clips in
which only the best instances of specific behaviors
are included. This dataset is the largest of the current
publicly available datasets. It consists of eight mouse
behavior classes: rear (399 cases), groom (1477), eat
(374), drink (61), hang (521), rest (868), walk (233)
and head (180). Each clip records a single mouse
from a side-view camera. The second database
denoted as the ‘full database’ involves 12 frame-by-
frame labeled videos lasting over 10 hours in total. In
order to make the recognition system more robust
during the training process, they varied the camera
angles and lighting conditions. They also used many
mice of different size, gender, and coat color in
experiments. In this paper, experiments of 4.1, 4.2,
4.3 and 4.4 are measured on the ‘clipped database’
using a half-by-half cross-validation procedure. The
‘full database’ is used to train and test our system
evaluated by a leave-one-out strategy in the last
experiment.
4 EXPERIMENTAL RESULTS
4.1 Comparison with Trajectory
Features
In this section, we evaluated the performance of our
visual features (VF) and contextual features (CF)
using different feature encoding methods, compared
with the state-of-the-art IDT features approach.
Table 1 compares the final performance of the
different features. In Table 1, we can observe that the
combined features have better accuracy than just one.
However, for IDT features, trajectory shapes seem
not to be suitable for mouse behavior recognition. The
reason may be that differences between behaviors can
be subtle, and the trajectory shape may not give
enough fine detail. The results also show that IDT
features without trajectory shapes have better
performance than with trajectory shapes (93.4% vs
92.6%). Furthermore, a Fisher vector representation
always results in a better performance than bag of
features for each type of feature and combined
features. Taking all the results together it is clear that
visual features and contextual features give best
results and their combination provides the best overall
accuracy (95.9% compared with 93.4% for IDT
features.
Table 1: Comparison of the performance (accuracy %) of
IDT features and spatio-temporal features.
Features BOF+NN FV+linear SVM FV+NN
IDT
Trajectory 69.1% 73.6% 73.3%
HOG 84.8% 91.6% 91.9%
HOF 77.2% 83.2% 84.9%
MBH 79.3% 87.9% 89.5%
Combined
with trajectory 85.5% 91.9% 92.6%
Combined
without
trajectory 88.5% 92.3% 93.4%
Spatio-temporal
Visual features 87.3% 91.4% 91.3%
Contextual
features 89.4% 92.2% 93.0%
Combined 93.1% 95.4% 95.9%
Behavior Recognition in Mouse Videos using Contextual Features Encoded by Spatial-temporal Stacked Fisher Vectors
265
4.2 Evaluation of Spatio-temporal
Visual and Contextual Features on
Specific Behaviors
Table 2 compares the performance of spatio-temporal
visual and contextual features for specific behaviors.
This experiment is tested on the same feature
encoding and classification (FV+NN). In Table 2, we
see that, except for “walk”, “head” and “groom”, the
contextual features seem to result in better accuracy.
The possible explanation is that the contextual
features are more effective for distinguishing
behaviors which are more localized, such as “eat”,
“drink”, “rear” and “hang”. These often happen near
the feeder, tube, wall and ceiling respectively.
Although the interest points of “groom”, “walk”,
“rest”, “groom” and “head” can happen at any place
except the ceiling, each behavior has a particular
distribution in both the spatial and temporal domains.
So this contextual distribution can also contain
evidence to help distinguish behaviors. However in
the ROC curve (see Fig. 6) of contextual features, the
performance for “head” is obviously worse than for
other behaviors. “Head” is easily confused with
similar spatio-temporal contextual and visual
information. The small proportion of “drink” in the
dataset also influences the final accuracy; it is
reasonable to suppose that if we had more “drink”
action videos for training (see section 4.4), the
accuracy would be greatly improved. We also note
that the combined features are able to achieve
significantly higher accuracy for each behavior than
either the contextual and visual features on their own.
Fig. 5 shows the confusion matrix for the combined
features for more detail.
Table 2: Comparison of the performance (accuracy %) of
visual features, contextual features and their combination.
Action visual contextual combined
features features features
rear 83.1% 84.0% 94.9%
groom 96.2% 96.2% 97.4%
eat 76.8% 87.5% 95.7%
drink 56.3% 84.8% 72.4%
hang 93.6% 96.3% 97.6%
rest 98.8% 99.1% 99.5%
walk 98.2% 96.5% 98.3%
head 64.5% 61.5% 69.8%
all 91.3% 93.0% 95.9%
Figure 5: The confusion matrix for the combination of visual and contextual features. The diagonal cells show the number
and percentage of correct classifications. The non-diagonal cells contain the number and percentage of incorrectly classified
behaviors. The proportion of each actual behavior that were correctly or incorrectly predicted is shown in the bottom row.
The proportion of each predicted behavior that were correct or incorrect is shown in the rightmost column. Overall, the
proportion of correct predictions is shown in the bottom right corner.
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
266
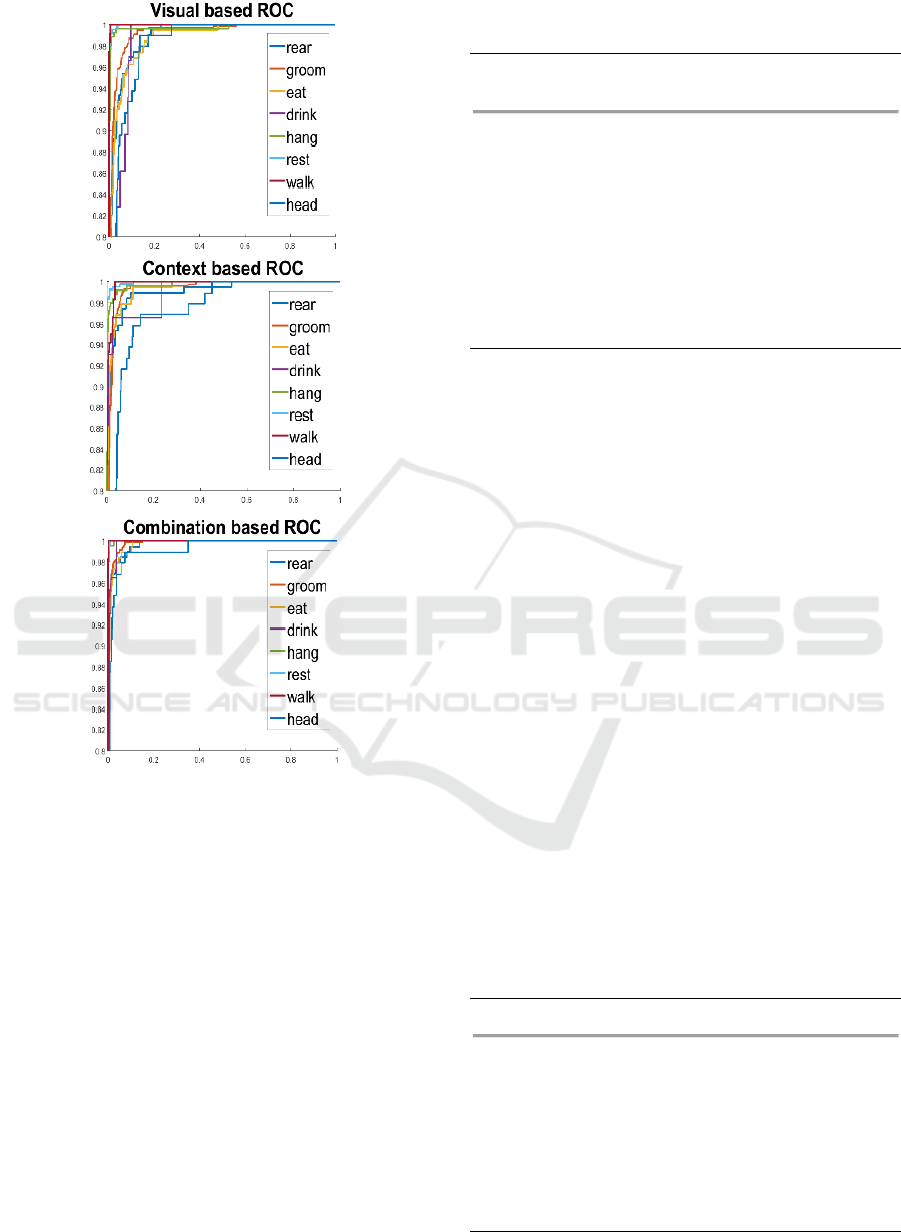
Figure 6: The ROC curve of visual features visual features,
contextual features and their combination.
4.3 Evaluation of Classification
In this section we compare our combined spatio-
temporal (ST) features with combined IDT features
using different encoding methods and classifiers.
Table 3 shows that our combined ST features always
outperform the IDT features using different
combinations of encoding methods and classifiers.
The table also shows that the combination of FV and
NN or linear SVM appears to achieve higher accuracy
for both combined IDT features and combined ST
features. Moreover, the combination of FV+NN,
FV+linear SVM and BOF+NN have better results
than the others. The results also suggest that the
performance of FV+NN is a little better than
FV+linear SVM which is used to classify IDT
features in (Wang et al. 2015). Typically the selection
of the SVM kernel is based on experience.
Table 3: Comparison of results (accuracy %) using different
encoding methods and classifiers.
Classification IDT IDT our ST
(no trajectory) (with trajectory)
FV + NN 93.4% 92.6% 95.9%
FV +
linear SVM 92.3% 91.9% 95.4%
FV +
RBF SVM 90.7% 88.6% 91.1%
BOF+NN 88.5% 85.5% 93.1%
BOF+kNN 79.4% 78.4% 90.9%
BOF+
linear SVM 87.1% 86.8% 92.4%
BOF +
RBF SVM 85.9% 84.7% 92.7%
However, NN seems to be more robust to different
encoding methods, because regardless of the features
and encoding method used in our experiment the NN
generally outperforms the other classifiers.
4.4 Comparison with State-of-the-art
In this section we compare our method to the method
proposed by Dollar et al. (Dollár et al., 2005) and
Wang et al. (Wang et al. 2015) for each specific
mouse behavior. We use the same validation strategy
(half-by-half) for each state-of-the art method and
compare the results in Table 4. Interestingly, all
methods, including ours, struggle to recognize “drink”
and “head”. In particular, the method proposed by
(Wang et al. 2015) achieves very low accuracy (5%).
The most likely reason is that “drink” and “head”
have only a small proportion of the training set (1.5%
and 4.3% respectively). We also see that the
trajectory features including trajectory shapes and
descriptors used by (Wang et al. 2015) cannot
correctly represent “drink” behavior, because their
interest points detecting method (Improving Dense
trajectory) struggles to detect useful feature points
Table 4: Comparison of accuracy with state-of-the-art
methods.
Action Dollar Wang our method Jhuang
rear 57.9% 89.7% 94.9% -
groom 88.4% 96.2% 97.4% -
eat 69.0% 88.8% 95.7% -
drink 41.0% 5.0% 72.4% -
hang 80.8% 96.9% 97.6% -
rest 98.8% 95.8% 99.5% -
walk 96.1% 97.0% 98.3% -
head 32.2% 64.8% 69.8% -
all 82.2% 92.3% 95.9% 93%
Behavior Recognition in Mouse Videos using Contextual Features Encoded by Spatial-temporal Stacked Fisher Vectors
267
from the drinking mouse which maintains its posture
but uses only its mouth (see Fig. 2). Overall, our
method significantly outperforms the current state-of-
the-art methods for each specific mouse behavior. In
terms of the final accuracy our method has an
improvement of 13.7%, 3.6% and 2.9% over (Dollár
et al., 2005), (Wang et al. 2015) and (Jhuang et al.,
2010), respectively.
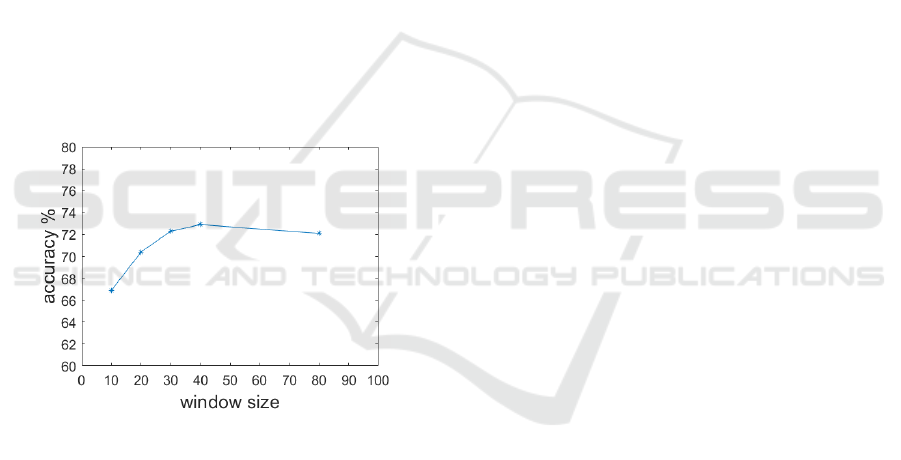
4.5 Continuous Video Annotation
To annotate continuous videos, sliding windows are
centered at each frame and both appearance features
and contextual features are computed inside them.
Once spatio-temporal features are computed for all
the sliding windows, Fisher vector is then computed
for each frame by focusing on a sliding window
centered in the current frame. These fisher vectors are
finally classified by a trained neural network and their
classification results are regarded as labels of all the
frames. To explore an optimal sliding window size,
we establish an experiment to compare the percentage
agreements with human annotation using different
sliding window sizes, illustrated in Fig. 7.
Figure 7: Continuous video annotation with different
window sizes.
5 CONCLUSION
This paper has presented a new approach to
automatically recognizing specific mouse behaviors.
We show that our interest detector is stable under
illumination. Our appearance and contextual fusion
features encoded by spatial-temporal stacked fisher
vector significantly outperform the other state-of-the-
art features. Also, the combination of Fisher vector
and neural networks improves the performance of our
system and gives higher accuracy than the other state-
of-the art systems. Overall, our method achieves an
average of 95.9% accuracy compared to the previous
best test of 93%. Final experiments on annotation of
continuous video also obtain results (72.9%) that are
on a par with human annotation, which is evaluated
as 71.6% in (Jhuang et al., 2010). Future work will
include exploring more distinguishing features,
combining temporal model and extending the range
of behaviors. We also plan to study social behavior
between multiple mice.
ACKNOWLEDGEMENT
This project is supported by UK EPSRC under Grant
EP/N011074/1 and National Natural Science
Foundation of China under Grant 61300111.
REFERENCES
Bishop, C. M. (2006). In Pattern Recognition and Machine
Learning.
Burgos-Artizzu, X. P., Dollár, P., Lin, D., Anderson, D. J.,
and Perona, P. (2012, June). In Social behavior
recognition in continuous video. IEEE Conference on
Computer Vision and Pattern Recognition.
Chatfield, K., Lempitsky, V. S., Vedaldi, A., and
Zisserman, A. (2011, September). In The devil is in the
details: an evaluation of recent feature encoding
methods. British Machine Vision Conference (Vol. 2,
No. 4, p. 8).
Dankert, H., Wang, L., Hoopfer, E. D., Anderson, D. J., and
Perona, P. (2009). In Automated monitoring and
analysis of social behavior in Drosophila. Nature
methods, 6(4), 297-303.
Dollár, P., Rabaud, V., Cottrell, G., and Belongie, S. (2005,
October). In Behavior recognition via sparse spatio-
temporal features. 2nd Joint IEEE International
Workshop on Visual Surveillance and Performance
Evaluation of Tracking and Surveillance.
Jaakkola, T. S., and Haussler, D. (1999). In Exploiting
generative models in discriminative classifiers.
Advances in neural information processing systems,
487-493.
Jhuang, H., Garrote, E., Yu, X., Khilnani, V., Poggio, T.,
Steele, A. D., and Serre, T. (2010). In Automated home-
cage behavioural phenotyping of mice. Nature
communications, 1, 68.
Jhuang, H., Serre, T., Wolf, L., and Poggio, T. (2007,
October). In A biologically inspired system for action
recognition. IEEE 11th International Conference on
Computer Vision (pp. 1-8).
Laptev, I. (2005). In On space-time interest points.
International Journal of Computer Vision, 64(2-3), 107-
123.
Roughan, J. V., Wright-Williams, S. L., and Flecknell, P.
A. (2009). In Automated analysis of postoperative
behaviour: assessment of HomeCageScan as a novel
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
268

method to rapidly identify pain and analgesic effects in
mice. Laboratory animals, 43(1), 17-26.
Rousseau, J. B. I., Van Lochem, P. B. A., Gispen, W. H.,
and Spruijt, B. M. (2000). In Classification of rat
behavior with an image-processing method and a
neural network. Behavior Research Methods,
Instruments, and Computers,32(1), 63-71.
Sánchez, J., Perronnin, F., Mensink, T., and Verbeek, J.
(2013). In Image classification with the fisher vector:
Theory and practice. International journal of computer
vision, 105(3), 222-245.
Simonyan, K., Vedaldi, A., and Zisserman, A. (2013). In
Deep fisher networks for large-scale image
classification. Advances in neural information
processing systems (pp. 163-171).
Steele, A. D., Jackson, W. S., King, O. D., and Lindquist,
S. (2007). In The power of automated high-resolution
behavior analysis revealed by its application to mouse
models of Huntington's and prion diseases. Proceedings
of the National Academy of Sciences, 104(6), 1983-
1988.
Perronnin, F., and Larlus, D. (2015). In Fisher vectors meet
neural networks: A hybrid classification architecture.
Proceedings of the IEEE conference on computer vision
and pattern recognition (pp. 3743-3752).
Perronnin, F., Sánchez, J., and Mensink, T. (2010). In
Improving the fisher kernel for large-scale image
classification. European conference on computer vision
(pp. 143-156). Springer Berlin Heidelberg.
Peng, X., Wang, L., Wang, X., and Qiao, Y. (2014). In Bag
of visual words and fusion methods for action
recognition: Comprehensive study and good practice.
arXiv preprint arXiv:1405.4506.
Peng, X., Wang, L., Qiao, Y., and Peng, Q. (2014, August).
In A joint evaluation of dictionary learning and feature
encoding for action recognition. 22nd International
Conference on Pattern Recognition (pp. 2607-2612).
Wang, H., Kläser, A., Schmid, C., and Liu, C. L. (2013). In
Dense trajectories and motion boundary descriptors for
action recognition. International journal of computer
vision, 103(1), 60-79.
Wang, H., and Schmid, C. (2013). In Action recognition
with improved trajectories. Proceedings of the IEEE
International Conference on Computer Vision (pp.
3551-3558).
Wang, H., Ullah, M. M., Klaser, A., Laptev, I., and Schmid,
C. (2009). In Evaluation of local spatio-temporal
features for action recognition. British Machine Vision
Conference (pp. 124-1).
Wang, H., Oneata, D., Verbeek, J., and Schmid, C. (2015).
In A robust and efficient video representation for action
recognition. International Journal of Computer Vision,
1-20.
Willems, G., Tuytelaars, T., and Van Gool, L. (2008). In An
efficient dense and scale-invariant spatio-temporal
interest point detector. European conference on
computer vision (pp. 650-663). Springer Berlin
Heidelberg.
Behavior Recognition in Mouse Videos using Contextual Features Encoded by Spatial-temporal Stacked Fisher Vectors
269
