
Measuring Self-organisation at Runtime
A Quantification Method based on Divergence Measures
Sven Tomforde
1
, Jan Kantert
2
and Bernhard Sick
1
1
Intelligent Embedded Systems, University of Kassel, Wilhelmsh
¨
oher Allee 73, 34121 Kassel, Germany
2
Institute of Systems Engineering, Leibniz Universi
¨
at Hannover, Appelstr. 4, 30169 Hannover, Germany
Keywords:
Self-organisation, Quantification of Self-organisation, Organic Computing, Adaptivity, Probabilistic Models,
Communication Patterns.
Abstract:
The term “self-organisation” typically refers to the ability of large-scale systems consisting of numerous au-
tonomous agents to establish and maintain their structure as a result of local interaction processes. The moti-
vation to develop systems based on the principle of self-organisation is to counter complexity and to improve
desired characteristics, such as robustness and context-adaptivity. In order to come up with a fair comparison
between different possible solutions, a prerequisite is that the degree of self-organisation is quantifiable. Even
though there are some attempts in literature that try to approach such a measure, there is none that is real-world
applicable, covers the entire runtime process of a system, and considers agents as blackboxes (i.e. does not
require internals about status or strategies). With this paper, we introduce a concept for such a metric that
is based on external observations, neglects the internal behaviour and strategies of autonomous entities, and
provides a continuous measure that allows for an easy comparibility.
1 INTRODUCTION
In 1991, Marc Weiser formulated his vision of “ubiq-
uitous computing” (Weiser, 1991) which predicted
that individual devices such as personal computers
will be replaced by “intelligent things” and these
things support humans in an imperceptible manner.
A fundamental prerequisite for such a pervasive sys-
tem serving humans in their daily lives is the abil-
ity of distributed technical devices to self-organise.
Since a centralised or even human controlled process
is not applicable due to the sheer amount of deci-
sions to be taken, the interdependencies among dis-
tributed elements, and the resulting complexity. As
a consequence, initiatives such as Proactive (Tennen-
house, 2000), Autonomic (Kephart and Chess, 2003),
and Organic Computing (Tomforde et al., 2011) or
Complex Adaptive Systems (Kernbach et al., 2011)
emerged that investigate large-scale self-adaptation
and self-organisation processes.
Although there is no commonly agreed defini-
tion of the term, the basic concept related to self-
organisation typically means that the structure of the
overall system is dynamic (i.e., time-variant), and
the adaptations causing these dynamic changes are
done by the entities forming the system. More pre-
cisely, the system consists of autonomous entities and
these entities decide with which other entity they in-
teract (e.g., to solve a task or to exchange informa-
tion). In the context of this paper, we will consider
the structure of a system being identical with the rela-
tions among distributed entities (i.e., subsystems or
agents in the terminology of multi-agent systems).
We further assume that such a relation has a func-
tional meaning, i.e., it defines an interaction that sup-
ports the functionality of the overall system.
The underlying hypothesis of all the aforemen-
tioned initiatives is that self-organisation is benefi-
cial in comparison to traditional, centralised solu-
tions; and that this benefit can be expressed in terms
of aspects such as higher robustness, higher effi-
ciency, or reduced task complexity, for instance—see
e.g. (M
¨
uller-Schloer et al., 2011; Wooldridge, 2009).
However, some work suggests that neither the fully
self-organised nor the fully centralised organisation
blueprint will result in the most efficient (or even opti-
mal) behaviour. One particular example from our own
preliminary work can be found in establishing pro-
gressive signal systems for urban road traffic control,
see (Tomforde et al., 2008). Here, nodes (i.e., inter-
section controllers) coordinate themselves to improve
the overall traffic flow. As a consequence, the system
96
Tomforde S., Kantert J. and Sick B.
Measuring Self-organisation at Runtime - A Quantification Method based on Divergence Measures.
DOI: 10.5220/0006240400960106
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 96-106
ISBN: 978-989-758-219-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

structure in terms of coordination schemes emerges as
a result of local interactions—self-organisation takes
place. However, a fully self-organised solution is not
beneficial in some cases—while, in turn, a fully cen-
tralised solution is not fast enough. As a consequence,
hybrid approaches have been developed that apply
self-organisation to a certain degree (Tomforde et al.,
2010a).
A meaningful comparison between different solu-
tions to the same problem area is twofold—if done
correctly: it founds on desired metrics (e.g., robust-
ness, utility) and accompanied cost (e.g., communi-
cation and computation overhead). However, to or-
der these attempts according to the system organisa-
tion, a third metric has to be applied: a quantifica-
tion of the degree of self-organisation. To estimate
the degree of self-organisation, the runtime behaviour
of a system has to be evaluated—without the need
of accessing internal logic and status of autonomous
entities: In increasingly open and interwoven sys-
tem structures consisting of autonomous agents (Tom-
forde et al., 2014; H
¨
ahner et al., 2015), we have to
deal with systems that we do not control and that we
have not developed—we can just observe their be-
haviour from the outside. In this paper, we develop
a concept for such a metric that is real-world applica-
ble, covers the entire runtime process of a system, and
considers agents as blackboxes (i.e., does not require
internals about status or strategies), see (Wooldridge,
2009). It can be used to quantify how much self-
organisation is observed—in contrast to classifying
systems as being either purely self-organised or cen-
tralised. We can further use the metric to distinguish
between such cases.
The remainder of this paper is organised as fol-
lows: Section 2 briefly summarises the state-of-the-
art. Afterwards, Section 3 describes the underlying
system model, the assumptions and preliminary work.
Section 4 introduces the novel approach to quantify
self-organisation in technical systems. Section 5 anal-
ysis the behaviour of the measurement in terms of an
exemplary scenario. Finally, the paper closes with a
summary and an outlook in Section 6.
2 STATE OF THE ART
The term “self-organisation” is increasingly used in
literature, covering a variety of domains such as math-
ematics (Lendaris, 1964), thermodynamics (Nicolis
and Prigogine, 1977), or information theory (Shal-
izi, 2001). In addition, non-technical considerations
have been discussed, see e.g. (Heylighen, 1999) for
an overview. Thereby, the term is typically used to de-
scribe effects where a certain structure emerges with
a bottom-up perspective—meaning as a result of au-
tonomous processes.
In systems engineering, especially in the con-
text of initiatives such as Organic (OC) and Auto-
nomic Computing (AC), methods to transfer classic
designers’ and administrators’ decisions to the re-
sponsibility of the systems themselves are investi-
gated. As a result, the relevance of a phenomenon
of self-organisation is ubiquitously accepted—but a
commonly agreed notion or definition of its charac-
teristics is not existing. Instead, a variety of some-
times contradictory definitions and descriptions are
observed.
Many natural and social systems served as inspi-
ration to frame the understanding of the term self-
organisation—ranging from work organisation in ant
colonies, see (Dorigo and Birattari, 2010) for a techni-
cal imitation, to flow formations in pedestrian move-
ments, see (Helbing, 2012). By external observation,
humans recognise an increase of order (e.g., in terms
of pattern forming)—a behaviour is produced that in
some way can be called “organised” (i.e., generating
some kind of structure). In addition, Polani refers to
this observation as self-organisation if the “source of
organisation is not explicitly identified outside of the
system” (Polani, 2013).
Continuing the previous discussion, Polani defines
self-organisation as a “phenomenon under which a
dynamical system exhibits the tendency to create or-
ganisation out of itself, without being driven by an
external system” (Polani, 2013). Unfortunately, this
definition—the same holds for others—is pretty close
to that of emergence. As a result, many attempts can
be found where emergence and self-organisation are
compared and distinguished from each other, e.g., in
(Shalizi, 2001). However, if no clear notion of both
terms is given, a separation is hardly possible.
In the context of OC, M
¨
uhl et al. proposed a for-
mal classification of technical systems with the pur-
pose to define a class for “self-organising technical
systems” (Muehl et al., 2007). Their classification
is founded on Zadeh’s notion of “adaptivity” (Zadeh,
1963) and introduces a hierarchical structure: from
self-manageable at the bottom layer to self-managing
and to self-organising. They consider a system as
self-organising “if it is (i) self-managing, i.e., the sys-
tem adapts to its environment without outside con-
trol, (ii) structure-adaptive, i.e., the system establishes
and maintains a certain kind of structure (e.g., spatial,
temporal) regarding the system’s primary functional-
ity, and (iii) employs decentralised control, i.e., the
system has no central point of failure” (Muehl et al.,
2007). From the perspective of this paper, insisting on
Measuring Self-organisation at Runtime - A Quantification Method based on Divergence Measures
97

a complete absence of external control is not desirable
since user influence is part of the overall concept, see
(Tomforde et al., 2011) as one example. However, the
classification gives a valuable guideline to what we
need as basis for defining self-organisation in techni-
cal systems.
Besides these conceptual approaches to self-
organisation, more formal methods have been pro-
posed that try to come up with a quantification of self-
organisation in technical systems. As a result of the
heterogeneous origins for working on self-organised
systems, a variety of attempts to measure and quan-
tify it have been made. A first example has been in-
troduced by Shalizi et al. (Shalizi and Shalizi, 2003;
Shalizi et al., 2004). They presented a mathematical
model following Shannon’s entropy and defined self-
organisation as a process that is characterised by an
increase in the amount of information needed to fore-
cast the upcoming system behaviour. The basic idea is
that the increase of internal complexity, i.e., without
external intervention, relates to the increase of self-
organisation. The method works on the basis of ob-
servable attributes, such as location (i.e., coordinates)
or sensor readings (e.g., temperature or speed).
Similarly, Heylighen et al. (Heylighen, 1999;
Heylighen and Joslyn, 2001) presented a concept to
use the statistical entropy as basis to determine a so-
called “degree of self-organisation”. Here, a system
that is stuck in an attractor within the state space is
defined to be self-organised, since the system cannot
reach other states any more. Consequently, a decrease
in statistical entropy can be observed which results in
an increase of order—that in turn is used as measure-
ment for self-organisation. The main message here
is that self-organisation results in stable solutions—
external inputs such as disturbances are needed to
restart the organisation process again.
Closely related is the concept proposed by
Parunack and Brueckner in the context of Multi-
Agent Systems (Van Dyke Parunak and Brueckner,
2001). They use an entropy model in combination
with the Kugler-Turvey model with the purpose to
combine systems with decreasing and increasing or-
der. In their work, a macro- and a micro-level in-
stance of a system are coupled and the information
entropy is used to determine the particular degree of
self-organisation for each abstraction level. The main
insight from this example is that self-organisation af-
fects different abstraction layers.
Furthermore, Wright et al. (Wright et al., 2000;
Wright et al., 2001) focussed on an attractor-oriented
concept for considering self-organisation. They dis-
cussed an approach to measure self-organisation by
using entropy as a function of an attractor’s dimen-
sionality within the underlying state space. Here, a
self-organised system requires an attractor—while the
organisation is considered according to Polani’s no-
tion (Polani, 2003). Following this approach, the au-
thors define a system to be self-organised if the dy-
namics of organisation information grow during op-
eration and in correspondence with these dynamics.
As one conclusion of the work, we can state that self-
organisation has a process perspective and is not just
a static characteristic of the system.
Gershenson et al. considered self-organisation as a
process opposed to emergence (Gershenson and Fer-
nandez, 2012). Therefore, they measured emergence
using Shannon’s entropy formula again, and deter-
mined self-organisation as decrease of emergence
over time. In general, Gershenson claims that in artifi-
cial self-organising systems (i.e., engineered systems)
“structure and function should emerge from interac-
tions between the elements” (Gershenson and Fernan-
dez, 2012). This implies that the system’s purpose is
neither designed or programmed, nor controlled. In
contrast, components should interact freely and mutu-
ally adapt towards a stable solution—also referred to
as finding a “preferable” setting through emergence
(Gershenson and Heylighen, 2003). In the context
of this paper, we focus on purpose-oriented systems
engineering—hence, letting the system find “some-
thing” is not an option.
OC came up with its own approach to—what they
called—“controlled self-organisation”, see (Schmeck
et al., 2010). They define a corridor for being self-
organised by using the maximum (no external inter-
vention for building structural patterns) and minimum
(extrinsically organised) boundaries. Following this
concept, a quantification of self-organisation is done
by considering the control mechanisms being respon-
sible for structure adaptations. For an adaptive system
S consisting of 1) m elements (with m > 1) that have
a large degree of autonomy and 2) k control mecha-
nisms (k ≥ 1), the degree of self-organisation can be
indicated as (k : m).
Summarising the previous discussion of the term
“self-organisation” in literature, we can initially state
that there are highly heterogeneous notions and un-
derstandings of what the term comprises. Most of
the discussed statements provide only a very basic ap-
proach to understanding when systems can be called
self-organised. Also, there is typically either a non-
technical perspective applied or the concept lacks a
consideration of organisation in the sense of a techni-
cal system structure.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
98
3 ASSUMPTIONS AND SYSTEM
MODEL
In the following, we define self-organisation as a con-
tinuous process to establish, change, and maintain a
system structure in terms of relationships between au-
tonomous subsystems (or agents). This process is per-
formed by the participating autonomous agents them-
selves, and it is utility-driven. This means that varying
external (and/or internal) conditions require different
system structures (and maybe even compositions in
terms of participating subsystems), which can be ex-
pressed in relation to a certain system goal. This sys-
tem goal, in turn, can be expressed by a given utility
function U. If the subsystems act without external
influences, i.e., their behaviour is controlled only by
adapting U, we call these subsystems autonomous—
which corresponds to the term agent where a com-
puter system acts on behalf of a user (Wooldridge,
2009).
3.1 System Model
From a conceptual point of view, we assume a self-
organising system S consisting of a potentially large
set of autonomous subsystems a
i
∈ A. Each a
i
is
equipped with sensors and actuators. Internally, each
a
i
distinguishes between a productive part (PS, re-
sponsible for the basic purpose of the system) and a
control mechanism (CM, responsible for controlling
the behaviour of PS and deciding about relations to
other subsystems). This corresponds to the separation
of concerns between System under Observation and
Control (SuOC) and Observer/Controller tandem in
the terminology of OC, see (Tomforde et al., 2011).
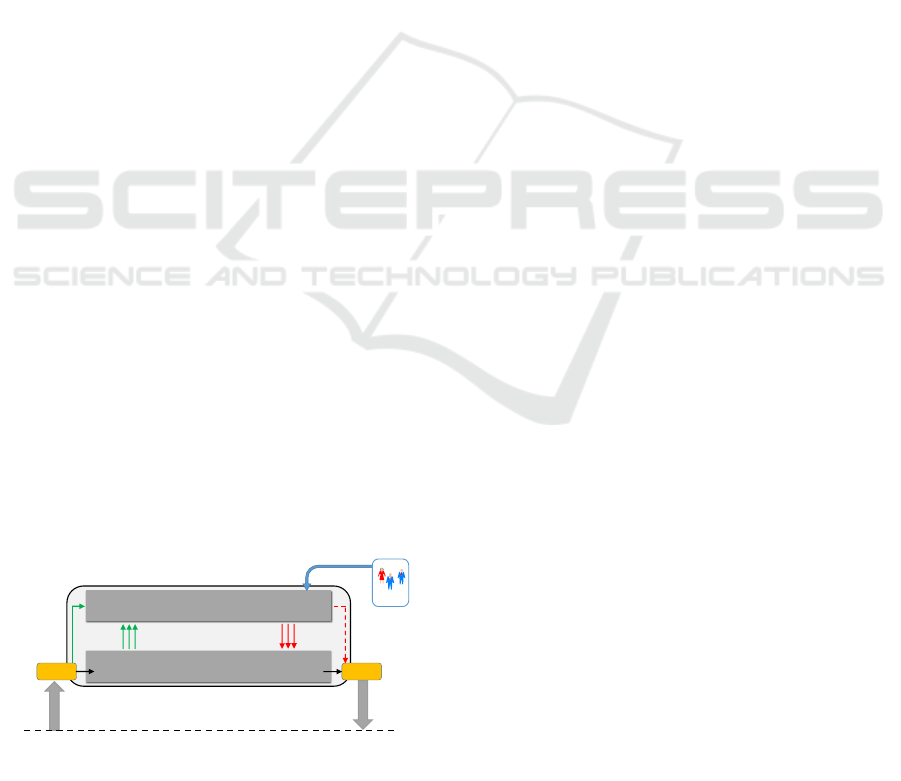
Figure 1 illustrates the basic system with its input
and output relations. However, this is just used to
highlight what we mean by referring to autonomous
subsystems. In particular, the user guides the be-
haviour of a
i
using U and does not intervene at de-
cision level—actual decisions are taken by CM.
Productive System
Control Mechanism (CM)
Sensors Actuators
ENVIRONMENT
Observation
of raw data
Execution of
interventions
Goals
User
Figure 1: Schematic illustration of an autonomous subsys-
tem.
We do not restrict the system composition, i.e., we
allow open systems. However, to define the system
boundaries within analysis, we require to deal with a
set of agents that potentially participate in the overall
system during a certain period of time. Furthermore,
we do not require to have full access to each agent
a
i
: Each agent can belong to different authorities, can
be controlled by other users, and can be designed and
developed using arbitrary concepts. This includes that
we are not aware of the strategies performed by CM,
the goal provided by the corresponding user, and the
applied techniques, for instance. However, we can ob-
serve the external effects: i) the actions that are per-
formed by each a
i
and ii) the messages that are sent
and received.
Technically, a relationship between two agents
represents a functional connection. This means that
cooperation is required to solve a certain task: as
input-output relations, as (mutual) exchange of infor-
mation, or as negotiation between a group of a
i
, to
name just a few. In all these cases, interaction be-
tween agents takes place which we map onto the con-
cept of organisation: a
i
are connected functionally
with each other and these connections are dynamic.
We assume that establishing and changing re-
lations in technical systems requires communica-
tion. For simplicity reasons, we model commu-
nication as sending and receiving messages via a
(shared) communication channel. Conceptually, in-
direct communication methods such as stigmergy
(Beckers et al., 1994) can be mapped onto this com-
munication scheme. However, we neglect these cases
for the remainder of this paper. Most importantly, we
require that the medium is shared and messages are
routed using standard communication protocols and
infrastructure, e.g., popular mechanisms such as the
Transmission Control Protocol / Internet Protocol (IP)
tandem, see (Tanenbaum, 2002). Correspondingly, a
i
are uniquely identifiable (e.g., via their IP address).
Based on this communication model, we assume that
each message has an origin and a destination, and
there are no fake messages (i.e., from an attacker with
a modified origin field). In addition, we require that
all messages are visible, and external sources (e.g.,
from users) can be identified (to neglect those mes-
sages as being not relevant for organisation).
3.2 Preliminary Work
In previous work (Kantert et al., 2015), we used a
variant of the aforementioned system model. We pro-
posed to measure the degree of organisation based
on the structure of communication and especially of
agreements in the system. To distinguish static or-
Measuring Self-organisation at Runtime - A Quantification Method based on Divergence Measures
99

ganisation from dynamic self-organisation (i.e., as a
process returning the system from a disturbed state
into the target space in the sense of OC, see (Schmeck
et al., 2010)), we record and quantify changes in the
mentioned structure during and after disturbances oc-
cur in the system.
In order to estimate the degree of organisation,
three different communication graphs G
i
(p) = (V, E
i
)
are built. Each graph is generated for a period p be-
tween t
1
and t
2
. In all graphs, the set of vertices V rep-
resents the same set of agents in the system (i.e., each
agent represents an autonomous subsystem). How-
ever, the edges E
i
describe different kinds of commu-
nication processes in the system:
1. A graph G
R
contains edges for all possible com-
munication paths between nodes and serves as ref-
erence (i.e., it encodes the maximum of edges that
are possible).
2. A graph G
C
represents the observed communica-
tion, i.e., an edge is added if a communication be-
tween two nodes has been observed in the current
period. The edges E
C
in graph G
C
define a sub-
set of the edges in G
R
, since sending a message
requires a communication path.
3. In the third graph G
A
, edges represent mutually
stable relationships between two agents. In gen-
eral, relationships are temporary. Such a relation-
ship is the result of, e.g., a negotiation process.
Finally, the measure is defined as:
Θ(G
R
, G
Y
) :=
|{e
i, j
: e
i, j
∈ E
1
⊕ e
i, j
∈ E
2
}|
0.5 ∗ (|V
1
| + |V
2
|)
(1)
with G
Y
as either G
C
or G
A
, E
1
defining the set
of edges for the first graph, E
2
the set of edges for
the second graph, V
1
and V
2
the corresponding sets of
vertices. We applied the concept to a scenario from
the smart camera domain, see (Rudolph et al., 2016).
Here, we showed that reorganisation effects can be
quantified using the developed metric. The graph cal-
culation and comparisons are done in three phases: 1)
at system startup, 2) during disturbances, and 3) af-
ter recovery from disturbances. This assumes distur-
bances to be seldom events that can be isolated and
detected appropriately fast. However, the approach
has some limitations—we will outline them and pro-
pose a modified technique in the next section.
4 AN APPROACH TO QUANTIFY
SELF-ORGANISATION
In this section, we initially discuss the limitations of
the previous approach, present a novel technique to
measure self-organisation in technical systems, and
discuss some design decisions related to this method.
Finally, we outline which challenges have to be ad-
dressed to apply the developed concept to real world
application.
4.1 Limitations of the Approach
The previously described approach (Section 3) is
characterised by some limitations:
1. It needs full knowledge about the underlying se-
mantics of the communication model. More pre-
cisely, we have to know if the message we observe
is related to system organisation aspects or not.
2. The approach assumes minimal communication,
i.e., agents do not share redundant information.
3. It assumes stable relationships between dis-
tributed entities in the overall system. More pre-
cisely, it builds a graph of nodes (reflecting en-
tities) and adds an edge if a relation exists, and
this relation is determined as result of an observed
communication.
In technical systems considered to be blackboxes (i.e.,
without access to internals), the required knowledge
about semantics may not be available (which is re-
lated to the first drawback), individual agents may
broadcast data (which is related to the second draw-
back), or the communication may require a continu-
ous process (which is related to the third drawback).
This is accompanied by a possibility to detect mutu-
ally stable relationships for G
A
. Furthermore, self-
organisation may frequently result in changes of the
structure. The graph representation is an additional
limitation since it loses information: Either there is
an edge or not (and these edges are undirected). Self-
organisation processes may—in contrast to the as-
sumed handshake model for G
A
—require more so-
phisticated data exchange schemes, more complex
decision processes incorporating more than just two
partners, and come up with relations that involve more
than just two interaction partners. In turn, they may
also include directed relationships rather than undi-
rected. These cases are not covered by the approach;
the same holds for inherent dynamics (i.e., establish-
ing and closing down relationships more than once in
a cycle).
4.2 Modelling Self-organisation
In the following, we outline how these limitations are
overcome. We again assume that self-organisation
manifests itself by means of relations that are es-
tablished, updated, and released by communication.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
100

However, we do not require semantics or minimal
data load. To detect or measure the self-organised
behaviour of a technical system S, we observe the
communication behaviour occurring among the au-
tonomous agents a
i
We assume that a system S shows a “normal” com-
munication behaviour. This means that there are no
conspicuous communication patterns, and the com-
munication patterns are characterised by low dynam-
ics. As one example, we do not assume a minimal-
istic communication approach—but we assume that
for a certain context the same (or at least a very sim-
ilar) communication pattern will be used in all cases.
Expressed in a probabilistic framework, we repre-
sent each subsystem a
i
as a process that generates
observable samples (i.e., messages). When measur-
ing self-organisation (e.g., by means of sensors mon-
itoring the communication channels), we have to use
communication-specific pre-processing techniques to
extract the values of attributes (features) from those
samples (observations). These attribute values de-
scribe the current behaviour of the observed system.
For a standard message, at least origin, destination,
packet size, and time stamp will be available in the
header information of the package sent over the chan-
nel. Based on these perceived attributes, we model
the attribute space by a variable x in the following (or
x in the case of an one-dimensional attribute space).
In general, x may consist of categorical and continu-
ous attributes, for instance. Please keep in mind that
each message observed within a monitoring period is
one sample in our model.
The basic model of self-organisation suggested in
this paper is that the dynamics of the communication
patterns reflect the dynamics of the self-organisation
processes. If no self-organisation takes place (i.e.,
the structure of S is static) no communication for or-
ganisation purposes is required. There may be other
communication (i.e., messages) within the system,
but none related to structure adaptations. In response
to disturbances, changing external or internal con-
ditions, or modifications of the utility function (i.e.,
user-triggered or as a function of time), the system
structure may have to be adapted as well. This is as-
sumed to manifest in a change of the communication
pattern: Subsystems may start to communicate with
other systems, stop communicating with current part-
ners, or may change the message frequencies, to name
just a few implications. However, the basic point is
that something is different, without the need of know-
ing what is different at a semantic level.
Based on this idea, we define self-organisation as
an unexpected or unpredictable change of the distri-
bution underlying the observed samples (i.e., the com-
munication behaviour). Consequently, a divergence
measure can be applied to compare two density func-
tions. We will refer to a density function p(x) repre-
senting an earlier point in time and to q(x) as a density
function representing the current observation cycle. A
famous divergence measure is the Kullback-Leibler
(KL) divergence KL(p||q), see (Bishop, 2011). It is
defined for continuous variables as follows:
KL(p||q) = −
Z
p(x)ln
q(x)
p(x)
dx (2)
KL is sometimes referred to as relative entropy; how-
ever, there is also a discrete version of the measure,
see (Shannon, 2001). KL is known to be applicable
only in a restricted manner, since it is not symmetric.
If needed we can provide a symmetric measure using:
KL
2
(p, q) =
1
2
(KL(p||q) + KL(q||p)) (3)
Although KL is still limited, it fulfils some important
requirements: 1) if p(x) = q(x) the measure KL(p||q)
is 0, and 2) KL(p||q) ≥ 0. Changing the formulation
of Equation 2 demonstrates the desired result:
KL(p||q) = −
Z
p(x) ln q(x)dx+−
Z
p(x) ln p(x)dx
(4)
This formula describes that we measure the expected
amount of information contained in a new distribu-
tion with respect to a reference distribution of sam-
ples. Taking the symmetric concept as defined by
Equation 3 into account, we can adapt Equation 4 as
follows:
KL
2
(p, q) =
1
2
(KL(p||q) + KL(q||p))
=
1
2
(−
Z
p(x) ln p(x)dx −
Z
p(x) ln q(x)dx
+
Z
q(x) ln q(x)dx −
Z
q(x) ln p(x)dx)
(5)
This formula (i.e., Equation 5) can be used as mea-
sure for quantifying self-organisation processes. Due
to the basic approach to compare distributions of the
underlying sample set (or more precisely: of the dis-
tribution of densities of observed samples within the
input space during a certain observation period), the
measure increases if the two distributions begin to
change. Considering the basic assumption we made
at the begin of this subsection, this exactly models
what we expect to observe if self-organisation takes
place.
The more subsystems a
i
participate in the struc-
ture building process, the higher is the divergence
Measuring Self-organisation at Runtime - A Quantification Method based on Divergence Measures
101
to the previous distribution—and consequently, the
higher is the measured self-organisation. Systems
with hierarchical elements will be characterised by
different communication pattern, resulting in a de-
creased degree of self-organisation since external-
oriented (i.e., towards central components) messages
are neglected. In case of fully centralised sys-
tem structures, no self-organisation will be indicated:
Messages towards/from external units (i.e., the cen-
tralised components) are neglected, and the commu-
nication patterns among CM do not change (i.e., only
’normal’ behaviour in terms of “hello” messages, for
instance).
The most important advantages of this approach
are as follows: 1) Compared to, e.g., (Schmeck et al.,
2010) it does not require internal information (such
as the number of CM). 2) As an alternative to, e.g.,
(Muehl et al., 2007) it is continuously quantifiable. 3)
In comparison to, e.g., (Gershenson and Fernandez,
2012) it is independent of emergence and what is un-
derstood to be emergent behaviour. 4) In contrast to,
e.g., (Kantert et al., 2015) it is applied continuously
and not just for disturbed periods. 5) In contrast to
most of the concepts from Section 2, a general model
of how the system works is not necessary—it is appli-
cable with low effort. 6) In contrast to, e.g., (Shalizi
et al., 2004) it takes only attributes that are relevant
for the structure of technical systems into account. Fi-
nally, it can easily incorporate system boundaries by
specifying communication addresses.
4.3 Observation Cycles
The process as outlined before requires an inherent
comparability of two probability distributions. Trans-
ferred to the temporal behaviour of a self-organising
system, this implies that the potential self-organising
process manifests itself in the difference between a
current and a referential distribution of attribute oc-
currences. Expressed in the probabilistic approach as
outlined before, this means that we observe a num-
ber of processes that “generate” samples resulting in
probability distributions. For a comparison, we have
to define that the sample period is equal, i.e., we allow
the same time period for the current observations as
for a reference period. This can be done using a slid-
ing window approach: A fixed time period d is used
to observe samples for the current estimation process
(i.e., between time t
0
and t
−1
) and the same duration
is used for a reference observation (i.e., the time pe-
riod directly before the current observations are done:
between t
−1
and t
−2
). Alternatively, the reference
window might be fixed (i.e., static), e.g., at the be-
gin of the observation (here, slow changes can be de-
tected easier, but oscillating behaviour may be harder
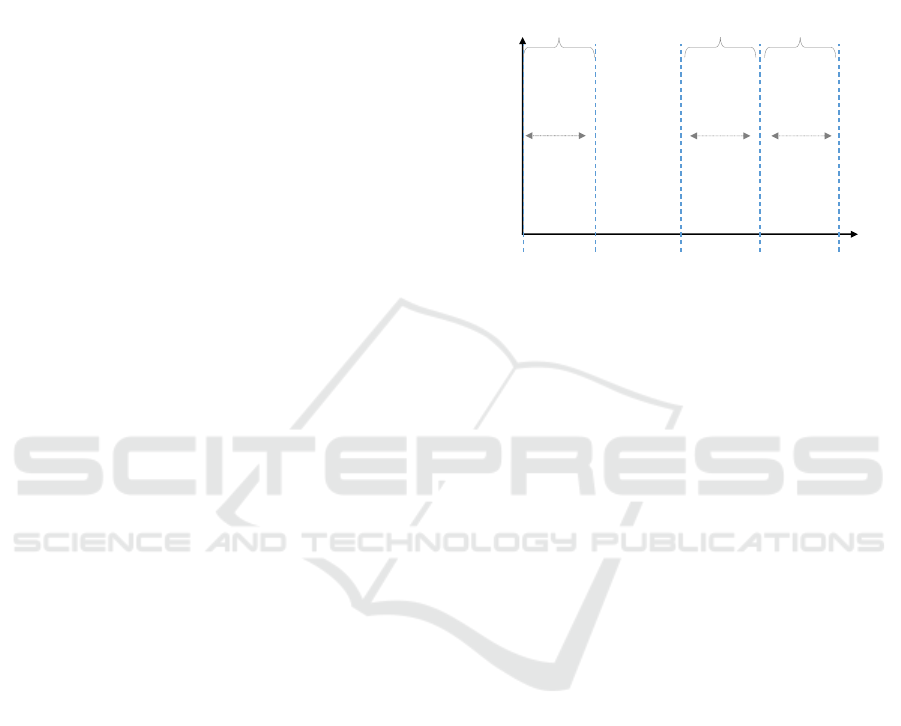
to detect). Figure 2 illustrates both approaches. How-
ever, it may be beneficial to use a hybrid approach
that combines both concepts: estimating the change
compared to the previous period and against a static
distribution to be able to cover all aspects.
time
relations
Current
distribution
Reference
distribution 1
Reference
distribution 2
Figure 2: Two possibilities for choosing observation and
reference window: sliding and static window approach.
The duration of these windows has to be chosen
depending on the underlying application, i.e., the size
must be long enough to reliably estimate the probabil-
ity distributions and simultaneously short enough to
be able to consider the observations as being (almost)
time-invariant. However, there is no standard answer
of how to configure the window size. A good estimate
is the online self-adaptation cycle (i.e., the frequency
at which CM observes the system status and takes
decisions)—for instance, an organic system runs a
feedback loop defined by the Observer/Controller tan-
dem in cycles of fixed length to analyse the util-
ity of the currently applied action and decides about
necessary interventions accordingly (Tomforde et al.,
2011). Taking a period of k cycles into account may
serve as a first starting point.
4.4 Open Challenges
This approach to quantifying self-organisation de-
scribes the general processes and the basic idea of
how self-organisation can be accessed. However, it
still comes with some limitations and open questions
that require research effort in the near future. From a
probabilistic point of view, we proposed to use KL as
divergence measure. This measure may take arbitrar-
ily high (positive) values. It would certainly be more
convenient to have a measure that is normalised, e.g.,
restricted to the unit interval [0; 1]. There are several
other divergence measures and we need to investigate
if one fits better than KL.
As outlined before, the parameter d defines the
length of the window used to observe samples. Al-
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
102

though choosing the length of d will depend on the
underlying application, the utilised communication
infrastructure, and the resulting communication pat-
terns, it may be beneficial to search for a heuristic to
chose d. We already mentioned the adaptation cycle
of CM as a possible reference point.
Another issue is as follows: If all subsystems
come together in discrete cycles and decide about the
system structure in a broadcast-based all-to-all ap-
proach, our method would come up with no mean-
ingful results, since the distributions will be almost
identical. However, we can detect such a peak be-
haviour in the observation stream (even together with
the underlying period) and, consequently, identify a
system as a possible candidate for such market-based
self-organisation mechanisms.
5 EXAMPLE SCENARIO
To illustrate the presented technique, we outline a spe-
cific example application from the vehicular traffic
control domain. However, the developed approach is
not restricted to a single domain. For instance, self-
adapting data communication networks are an obvi-
ous next step to analyse the behaviour of the mea-
surement, e.g., in the context of the system presented
in (Tomforde et al., 2009; Tomforde et al., 2010b).
Another possible application scenario to analyse the
behaviour in future work is a self-adapting activity
recognition system that dynamically includes sensors
from the environment and other devices as, e.g., out-
lined in (J
¨
anicke et al., 2016). Here, the degree of
self-organisation can be used to quantify to which ex-
tent the system made use of its ability to include new
sensors or deactivate previously used sensors while
trying to maximise the recognition rate.
5.1 Scenario
Due to the dynamics of traffic, adapting traffic control
strategies to changing conditions is a promising appli-
cation area for self-adaptive and self-organising sys-
tems (Prothmann et al., 2011). Besides changing du-
rations of green phases, autonomous self-organisation
comes into play if intersection controllers (i.e., a
CM in the notion of Section 3.1) are responsible for
establishing and maintaining progressive signal sys-
tems (PSS)—also called “green waves”. In (Tom-
forde et al., 2008), a distributed PSS mechanism
(DPSS) for urban road networks is presented (Tom-
forde et al., 2008). The approach is a three step pro-
cess and works as follows: 1) Initially, distributed CM
determine partners that collaborate to form a PSS, 2)
after establishing partnerships, the collaborating CM
agree on a common cycle time, and 3) the partners se-
lect signal plans that respect the common cycle time,
calculate offsets, and establish a coordinated signali-
sation. We analyse this example in the remainder to
highlight the behaviour of the proposed measure.
For the first step of DPSS, each CM estimates
(based on local sensor data) which is the most promi-
nent stream running over the controlled intersection,
i.e., the stream with the currently highest number of
vehicles
hour
. Afterwards, it sends a request for partnership
to the upstream CM—which is the desired predeces-
sor in a PSS. Either that CM accepts partnerships or
it rejects. In case of rejection, the second best neigh-
bour is asked. For the second step, an echo algorithm
is used that starts at the first CM of a PSS. It estimates
the locally desired values for the cycle time and sends
this to the successor CM. All subsequent CM calcu-
late the maximum of this received value and their de-
sired cycle time and pass it to the next CM until the
last intersection of the PSS is reached. This last CM
propagates the chosen cycle time back to all CM in re-
verse direction. Finally, the first CM selects the most
beneficial signal plan (i.e., defining green durations
at the underlying intersection) that reflects the deter-
mined cycle time, calculates an offset (i.e., a relative
start within the cycle) and passes this information to
its successor. This is continued until the last intersec-
tion is reached. When all CM activate their chosen
signal plan, the PSS is established. Afterwards, each
node continuously monitors if the traffic behaviour
still corresponds to the desired PSS—and starts an
update or re-negotiation process if the preferences re-
garding traffic streams or desired cycle time change,
or if a partner node is not available any more.
In this example, the organisation of the system
manifests itself in terms of functional relations by
means of forming a PSS, i.e., predecessor-successor
relationships. The system is self-organised with re-
spect to the definition in Section 3 since these rela-
tions are established and updated by the autonomous
CM participating in the system.
5.2 Analysis of the Behaviour
In this traffic scenario, we assume each inter-
section controller (i.e., each CM) to continuously
send “hello”-messages to verify the availability of
neighbours—since a neighbour that is not reachable
via communication cannot participate in a PSS. In ad-
dition, the process itself requires communication ef-
fort in all three phases. This process runs continu-
ously: At system startup, initial coordination schemes
may be generated, and they are continuously moni-
Measuring Self-organisation at Runtime - A Quantification Method based on Divergence Measures
103

tored and adapted throughout the system’s operation.
However, we observe periods of low communica-
tion effort (i.e., only “hello”-messages are exchanged)
where no self-organisation takes place. In this case,
the structure is static.
Traffic load in urban areas changes during the
course of a day. As a consequence, the load on the
streams varies. Consider commuter traffic as an il-
lustrating example: During the morning rush hours,
the highest traffic load moves towards the city centre,
while the reverse direction is favoured in the after-
noon. Consequently, the best possible PSS switches
during lunch time from inwards to outwards. As a
conclusion from this simple example, we can observe
that the most prominent streams will change through-
out the day. As a consequence, the CM will even-
tually activate the DPSS mechanism with all three
phases, resulting in frequent message exchange. In
addition, this process is not necessarily a disturbance
as assumed in previous work. In contrast, it will most
probably happen frequently. However, in case of dis-
turbances (i.e., blocked roads and a resulting drop
in traffic load for streams running over that road, or
failures of neighboured CM) we will observe com-
munication behaviour as well. The proposed mea-
sure is able to detect these phases of reorganisation
and consequently quantifies the degree to which self-
organisation takes place in this example system.
As a basis of comparison, other concepts for PSS
can be compared to the DPSS approach using the
proposed metric. Systems with hierarchical elements
will show a different communication pattern, result-
ing in a decreased degree of self-organisation since
external-oriented (i.e., towards central components)
messages are neglected. In case of fully centralised
system structures, no self-organisation will be indi-
cated, since no messages among CM are exchanges
(besides “hello” messages, for instance).
6 CONCLUSION
In this paper, we defined what self-organisation
means in technical systems from our point of view
and proposed a technique to measure and quantify
it at runtime. Our basic system model assumes au-
tonomous agents forming the overall system—which
means that we do not have any insights about the
status, the strategies, and the goals of an individual
agent. Consequently, we propose to base a measure
on the only information that is available for external
observers: the communication in terms of messages.
Compared to previous work, we do not make any
assumptions regarding the purpose and semantics of
communication. In contrast, we define a probabilistic
model to estimate distributions of samples (i.e., mes-
sages) within a fixed time period. We then compare
the current distribution against a reference distribu-
tion. The more these distributions differ, the more
self-organisation takes place. We further discussed
how the sampling period to derive these distributions
has to be chosen and how a comparison can be calcu-
lated. For illustration purposes, we briefly discussed
a scenario from urban traffic control, i.e., establish-
ing progressive signal systems, and explained the ex-
pected behaviour of the proposed measure.
As part of this paper, we already discussed current
challenges to be addressed in Section 4.4. Our future
work will investigate how possible solutions can be
developed. For instance, we proposed to make use of
the Kullback-Leibler divergence to compare different
distributions. However, there are various divergence
measures known in literature and we have to inves-
tigate which performs best, i.e., quantifies the effect
of self-organisation as close to human recognition as
possible.
Furthermore, the concept is based on the observa-
tion of communication—and the possibility to neglect
external messages (i.e., with origin or destination that
are not part of S). The developed measure may also
be used to relate it to the subsequent reorganisation
process. If knowing about external influences and ob-
serving reorganisation afterwards, it may serve as an
indicator that the system is less autonomous or that
the user triggered a change of utility. Consequently,
it may be extended towards estimating the autonomy
of the system at runtime. Given a long enough ob-
servation period, we may also be able to learn what
the most appropriate system structure is for a given
context (and a given utility function).
Finally, we aim at analysing the behaviour of
the developed measurement in simulations of self-
organised systems. Initially, we consider traffic con-
trol as outlined before. Afterwards, we aim at increas-
ing the scope towards data communication and activ-
ity recognition systems.
ACKNOWLEDGEMENTS
The authors would like to thank the German
research foundation (Deutsche Forschungsgemein-
schaft, DFG) for the financial support in the context
of the “Organic Computing Techniques for Runtime
Self-Adaptation of Multi-Modal Activity Recognition
Systems” project (SI 674/12-1).
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
104

REFERENCES
Beckers, R., Holland, O. E., and Deneubourg, J. (1994).
From local actions to global tasks: Stigmergy and col-
lective robotics. Artificial Life IV, pages 181 – 189.
Bishop, C. M. (2011). Pattern Recognition and Ma-
chine Learning. Information Science and Statistics.
Springer, 2nd edition. ISBN 978-0387310732.
Dorigo, M. and Birattari, M. (2010). Ant Colony Optimiza-
tion. In Sammut, C. and Webb, G., editors, Encyclope-
dia of Machine Learning, pages 36–39. Springer US.
Gershenson, C. and Fernandez, N. (2012). Complex-
ity and Information: Measuring Emergence, Self-
organization, and Homeostasis at Multiple Scales.
Complexity, 18(2):29–44.
Gershenson, C. and Heylighen, F. (2003). The Meaning
of Self-Organisation in Computing. IEEE Intelligent
Systems, pages 72 – 75.
H
¨
ahner, J., Brinkschulte, U., Lukowicz, P., Mostaghim, S.,
Sick, B., and Tomforde, S. (2015). Runtime Self-
Integration as Key Challenge for Mastering Interwo-
ven Systems. In Proceedings of the 28th GI/ITG
International Conference on Architecture of Com-
puting Systems – ARCS Workshops, held 24 – 27
March 2015 in Porto, Portugal, Workshop on Self-
Optimisation in Organic and Autonomic Computing
Systems (SAOS15), pages 1 – 8. VDE Verlag.
Helbing, D. (2012). Social Self-Organization: Agent-Based
Simulations and Experiments to Study Emergent So-
cial Behavior. Springer. ISBN-13: 978-3642240034.
Heylighen, F. (1999). The Science Of Self-Organization
And Adaptivity. In Knowledge Management, Orga-
nizational Intelligence and Learning, and Complex-
ity, in: The Encyclopedia of Life Support Systems,
EOLSS, pages 253–280. Publishers Co. Ltd.
Heylighen, F. and Joslyn, C. (2001). Cybernetics and
Second-Order Cybernetics. In Meyers, R. A., edi-
tor, Encyclopedia of Physical Science and Technol-
ogy. Acadmeic Press, New York, US, 3rd edition.
J
¨
anicke, M., Tomforde, S., and Sick, B. (2016). Towards
Self-Improving Activity Recognition Systems Based
on Probabilistic, Generative Models. In 2016 IEEE
International Conference on Autonomic Computing,
ICAC 2016, Wuerzburg, Germany, July 17-22, 2016,
pages 285–291.
Kantert, J., Tomforde, S., and M
¨
uller-Schloer, C. (2015).
Measuring Self-Organisation in Distributed Systems
by External Observation. In Proceedings of the 28th
GI/ITG International Conference on Architecture of
Computing Systems – ARCS Workshops, pages 1 – 8.
VDE. ISBN 978-3-8007-3657-7.
Kephart, J. and Chess, D. (2003). The Vision of Autonomic
Computing. IEEE Computer, 36(1):41–50.
Kernbach, S., Schmickl, T., and Timmis, J. (2011). Collec-
tive adaptive systems: Challenges beyond evolvabil-
ity. ACM Computing Research Repository (CoRR).
last access: 07/14/2014.
Lendaris, G. G. (1964). On the Definition of Self-organising
Systems. Proceedings of the IEEE, 52(3):324–325.
Muehl, G., Werner, M., Jaeger, M., Herrmann, K., and
Parzyjegla, H. (2007). On the Definitions of Self-
Managing and Self-Organizing Systems. In Commu-
nication in Distributed Systems (KiVS), 2007 ITG-GI
Conference, Kommunikation in Verteilten Systemen,
26. Februar - 2. M
¨
arz 2007 in Bern, Schweiz, pages
1–11.
M
¨
uller-Schloer, C., Schmeck, H., and Ungerer, T., editors
(2011). Organic Computing - A Paradigm Shift for
Complex Systems. Autonomic Systems. Birkh
¨
auser
Verlag, Basel, CH.
Nicolis, G. and Prigogine, I. (1977). Self-Organisation in
Nonequilibrium Systems: From Dissipative Structures
to Order through Fluctuations. Wiley, 1st edition.
Polani, D. (2003). Measuring Self-Organization via Ob-
servers. In Banzhaf, W., Ziegler, J., Christaller, T.,
Dittrich, P., and Kim, J., editors, Advances in Artifi-
cial Life, volume 2801 of Lecture Notes in Computer
Science, pages 667–675. Springer Verlag, Berlin Hei-
delberg, Germany.
Polani, D. (2013). Foundations and Formalisations of Self-
Organisation. In Prokopenko, M., editor, Advances in
Applied Self-Organizing Systems, chapter 2, pages 23
– 43. Springer Verlag.
Prothmann, H., Tomforde, S., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2011). Organic
Traffic Control. In Organic Computing – A Paradigm
Shift for Complex Systems, Autonomic Systems, pages
431 – 446. Birkh
¨
auser Verlag, Basel, CH.
Rudolph, S., Kantert, J., J
¨
anen, U., Tomforde, S., H
¨
ahner,
J., and M
¨
uller-Schloer, C. (2016). Measuring Self-
Organisation Processes in Smart Camera Networks. In
Varbanescu, A. L., editor, Proceedings of the 29th In-
ternational Conference on Architecture of Computing
Systems (ARCS 2016), chapter 14, pages 1–6. VDE
Verlag GmbH, Berlin, Offenbach, DE, Nuremberg,
Germany.
Schmeck, H., M
¨
uller-Schloer, C., C¸ akar, E., Mnif, M., and
Richter, U. (2010). Adaptivity and Self-organisation
in Organic Computing Systems. ACM Transactions on
Autonomous and Adaptive Systems (TAAS), 5(3):1–32.
Shalizi, C., Shalizi, K., and Haslinger, R. (2004). Quantify-
ing Self-Organization with Optimal Predictors. Phys.
Rev. Lett., 93:118701.
Shalizi, C. R. (2001). Causal Architecture, Complexity
and Self-organization in Time Series and Cellular Au-
tomata. PhD thesis, The University of Wisconsin -
Madison.
Shalizi, C. R. and Shalizi, K. L. (2003). Quantifying
Self-Organization in Cyclic Cellular Automata. In
Schimansky-Geier, L., Abbott, D., Neiman, A., and
den Broeck, C. V., editors, Noise in Complex Systems
and Stochastic Dynamics, Proceedings of SPIE, vol-
ume 5114, pages 108 – 117. Bellingham, Washington.
Shannon, C. E. (2001). A Mathematical Theory of Commu-
nication. ACM SIGMOBILE Mobile Computing and
Communications Review, 5(1):3–55.
Tanenbaum, A. S. (2002). Computer Networks. Pearson
Education, 4th edition.
Tennenhouse, D. (2000). Proactive Computing. Communi-
cations of the ACM, 43(5):43–50.
Tomforde, S., Cakar, E., and H
¨
ahner, J. (2009). Dynamic
Control of Network Protocols - A new vision for fu-
Measuring Self-organisation at Runtime - A Quantification Method based on Divergence Measures
105

ture self-organised networks. In Filipe, J., Cetto, J. A.,
and Ferrier, J.-L., editors, Proceedings of the 6th In-
ternational Conference on Informatics in Control, Au-
tomation, and Robotics (ICINCO’09), held in Milan,
Italy (2 - 5 July, 2009), pages 285 – 290, Milan. IN-
STICC.
Tomforde, S., H
¨
ahner, J., and Sick, B. (2014). Interwoven
Systems. Informatik-Spektrum, 37(5):483–487. Ak-
tuelles Schlagwort.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and Control of Organic Systems.
In M
¨
uller-Schloer, C., Schmeck, H., and Ungerer, T.,
editors, Organic Computing - A Paradigm Shift for
Complex Systems, Autonomic Systems, pages 325 –
338. Birkh
¨
auser Verlag.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2010a). Possi-
bilities and Limitations of Decentralised Traffic Con-
trol Systems. In 2010 IEEE World Congress on Com-
putational Intelligence (IEEE WCCI 2010), held 18
Jul - 23 Jul 2010 in Narcelona, Spain, pages 3298–
3306. IEEE.
Tomforde, S., Prothmann, H., Rochner, F., Branke, J.,
H
¨
ahner, J., M
¨
uller-Schloer, C., and Schmeck, H.
(2008). Decentralised Progressive Signal Systems for
Organic Traffic Control. In Brueckner, S., Robert-
son, P., and Bellur, U., editors, Proceedings of the 2nd
IEEE International Conference on Self-Adaption and
Self-Organization (SASO’08), held in Venice, Italy
(October 20 - 24, 2008), pages 413–422. IEEE.
Tomforde, S., Zgeras, I., H
¨
ahner, J., and M
¨
uller-Schloer,
C. (2010b). Adaptive control of Wireless Sensor Net-
works. In Proceedings of the 7th International Confer-
ence on Autonomic and Trusted Computing (ATC’10),
held in Xi’an, China (October 26-29, 2010), pages 77
– 91.
Van Dyke Parunak, H. and Brueckner, S. (2001). Entropy
and Self-organization in Multi-agent Systems. In Pro-
ceedings of the Fifth International Conference on Au-
tonomous Agents, AGENTS’01 Autonomous Agents
2001, Montreal, QC, Canada - May 28 - June 01,
2001, AGENTS ’01, pages 124–130, New York, NY,
USA. ACM.
Weiser, M. (1991). The computer for the 21st century. Sci-
entific American, 265(3):66–75.
Wooldridge, M. J. (2009). An Introduction to MultiAgent
Systems. John Wiley & Sons Publishers, Hoboken,
NJ, US, 2nd edition.
Wright, W., Smith, R. E., Danek, M., and Greenway, P.
(2000). A Measure of Emergence in an Adapting,
Multi-Agent Context. In From Animals to Animats
6: Proceedings of the 6th Int. Conf. on Simulation of
Adaptive Behavior, pages 20 – 27. Springer.
Wright, W., Smith, R. E., Danek, M., and Greenway, P.
(2001). A Generalisable Measure of Self-Organisation
and Emergence. In Proc. of the Int. Conf. on Artificial
Neural Networks (ICANN’01), volume 2130 of LNCS,
pages 857 – 864. Springer.
Zadeh, L. A. (1963). On the Definition of Adaptivity. Pro-
ceedings of the IEEE, 3(1):470 – 496.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
106
