
Towards Meta-adaptation of Dynamic Adaptive Systems with
Models@Runtime
Nicolas Ferry, Franck Chauvel, Hui Song and Arnor Solberg
SINTEF, Oslo, Norway
Keywords:
Model-driven Engineering, Models@runtime, Dynamic Adaptive Systems.
Abstract:
A models@runtime environment keeps a model in synchrony with a running system, this way a reasoning
engine adapts the system by modifying this model. Existing models@runtime environments typically fail to
let the user control what concepts form the model nor how the model is synchronised with the running system.
This is yet mandatory in uncertain environments that are open, dynamic and heterogeneous. In this position
paper we evolve the classical models@runtime architectural pattern to address this issue, together with some
initial implementation results.
1 INTRODUCTION
Modern software combines many dedicated compon-
ents (containers, databases, front-ends) and becomes
large scale, distributed, and dynamic systems. These
systems must inevitably evolve due to bugs, new
features, evolution of dependencies or new service-
level objectives, etc. These evolutions call for dy-
namically adaptive systems (DAS) that withstand
modification while running. However, the complex-
ity of managing these DAS rapidly overwhelms IT
teams, which must therefore automate most mainten-
ance operations (Mainsah, 2002). Self-adaptive sys-
tems (de Lemos et al., 2010) promise to mitigate this
issue by automatically adjusting their behaviour to
their environment, but their design remains an open
challenge that results in ad hoc solutions (de Lemos
et al., 2010).
Model-driven engineering (MDE) helps design
these self-adaptive systems using domain-specific
models that focus on domain concepts and better
isolate separate concerns (France and Rumpe, 2007).
The models@runtime pattern (Morin et al., 2009)
applies these MDE ideas to self-adaptive systems:
The system thus maintains a domain-specific model
of its state (tailored for a given adaptation) and any
change made to this model is automatically synchron-
ised with the running system. However, existing
models@runtime approaches predefine one such syn-
chronisation policy between the model and the run-
ning system. This prohibits any dynamic modifica-
tion of the adaptation mechanisms (so called “meta-
adaptation”) and reduces our ability to control (i)
what concepts are reflected into the runtime model
and (ii) how a change in this model is synchronised
with the running system.
In this position paper, we enhance the mod-
els@runtime architectural pattern to support meta-
adaptation and present initial implementation results.
The remainder is organised as follows. Sec. 2 first
introduces our running example. Sec. 3 illustrates the
current limitations of the models@runtime practice.
Sec. 4 then describes how we evolved the classical
models@runtime architecture. Finally, Sec. 5 dis-
cusses selected related work before Sec. 6 concludes
with our future research directions.
2 MOTIVATING EXAMPLE
We consider as a running example a cloud service
broker that calls for more flexible models@runtime
architectures.
This broker registers cloud services, their specific-
ation as well as information about their status. It in-
cludes a reasoning engine that helps prevent and cope
with services’ failure. When a service is likely to
fail—say because of high CPU load—the broker re-
commends alternative services. When a service fails,
the broker automatically replaces it by a known sub-
stitute. The broker maintains, at runtime, a feature
model that details all the services and their substitutes.
Our broker uses CLOUDMF (Ferry et al., 2014)
Ferry N., Chauvel F., Song H. and Solberg A.
Towards Meta-adaptation of Dynamic Adaptive Systems with Models@Runtime.
DOI: 10.5220/0006225905030508
In Proceedings of the 5th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2017), pages 503-508
ISBN: 978-989-758-210-3
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
503
to replace services. CLOUDMF helps developers
and operators deploy and manage cloud systems that
run across multiple clouds. The CLOUDMF runtime
model relies on CLOUDML, a domain-specific mod-
elling language that describes cloud environments
(virtual machines, applications servers or third-party
services) as well as the software components they host
(services, applications or libraries). The components’
life-cycle captures recurrent operations activities such
as uploads, installations, configurations, starts and
stops. Additional resources such as scripts, binaries
or configuration files can complement the compon-
ents, making these activities explicit.
For instance, the broker exposes a service that col-
lects raw sensor data, together with an engine that
detects specific patterns in incoming data streams.
When this engine fails, the broker automatically re-
places it by a distributed real-time computation sys-
tem called Apache Storm
1
. Any deployment of
Apache Storm includes a master node (called Nim-
bus) that assigns tasks to slave nodes (called Super-
visors). Nimbus and Supervisors are storm-specific
concepts that do not belong to the previous runtime
model and therefore require specific configuration op-
erations conflicting with the default CLOUDMF de-
ployment policy. Thus, this requires adapting how the
modifications in the CLOUDML model are synchron-
ised with the running system. In addition, in order
to improve failure predictions, we update the metrics
that are monitored. Instead of CPU usage, we aggreg-
ate CPU usage, response time, and network traffic
into a new metric called “workload”. This evolution
requires not only to change the modelling concepts
(i.e., new attributes in existing concepts), but also to
change the synchronisation between the model and
the system (i.e., how to reflect the system state into
the attribute values).
3 THE MODELS@RUNTIME
PATTERN
Models@runtime (Morin et al., 2009; Blair et al.,
2009) is an architectural pattern that embeds mod-
els during execution to ease adaptation and reconfig-
uration. This pattern decouples the internal state of
the system from the API used to modify this very
state. A runtime model describes this state in a
semantic-rich way, and is continuously synchronised
with the running system using that management API.
Hence, any change in the running system appears
in the model, while conversely, any change made to
1
See https://storm.apache.org/
the model impacts, on demand, the running system.
Models@runtime facilitates simulation, planning and
automation of adaptation activities by hiding the spe-
cific API details and representing the data with se-
mantics.
The models@runtime pattern includes a system,
a model and several transformations. A system is
a runnable artefact, whose state is partially observ-
able and controllable from the outside during execu-
tion. A model is one representation of that system’s
state, from a certain perspective. A transformation is
a process that consumes one artefact and outputs an-
other. Depending on what artefacts transformations
consume and outputs, we defined four types of trans-
formation:
1. Adaptation. Both source and target are mod-
els. This is the traditional model transforma-
tion. A special case, which is common in mod-
els@runtime approaches, is an endogenous trans-
formation where the source and the target are
models that describe the same system.
2. Monitoring. The source is a system and the target
is a model. With the monitoring transformation,
the model represents certain state or behaviour of
the running system.
3. Enactment. The source is a model and the target
is a system. The model governs the state of the
system.
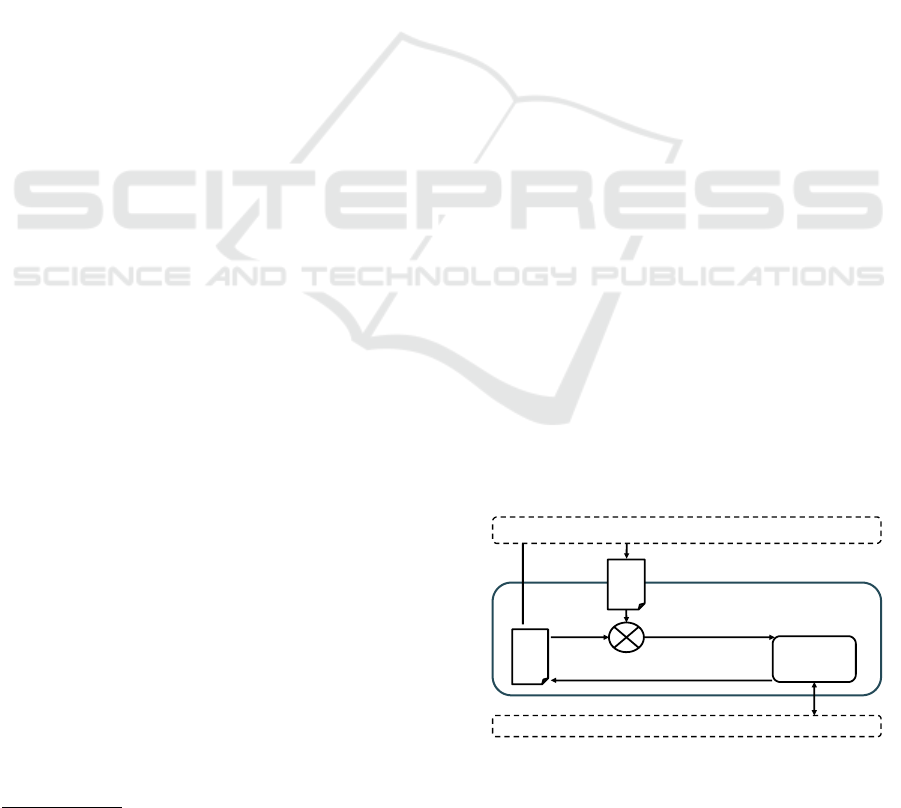
Fig. 1 depicts a typical models@runtime environ-
ment. The reasoning engine reads the current runtime
model (Step 1), which describes the running system,
and then specifies how to reconfigure it in a target
model (Step 2). The runtime environment next com-
putes the difference between these runtime and target
models (Step 3) and generates a sequence of reconfig-
uration actions. The adaptation engine then triggers
each action, thereby gradually adjusting the running
system (Steps 4 and 5).
s
Technology for a better society
16
Runningsystem
Current
model
Adaptation
engine
Target
model
Diff
(1)
(2)
(3)
(4)
Reasoningengine(s)
(5)
Figure 1: Typical models@runtime architecture.
However, the existing projects offering a mod-
els@runtime environment, such as DiVA (Morin
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
504

et al., 2009), CLOUDMF (Ferry et al., 2014),
Genie (Bencomo et al., 2008) and WComp (Ferry
et al., 2009), do not permit correction of the beha-
vior of the models@run-time environment: that is to
influence what actions are triggered and in what order.
Monitoring Transformation Limitations. The
monitoring transformation exploits the APIs of the
system to build a model of its internal state, which
may include its main components, their current status
as well as the environment. While models@runtime
help continuously adjust to a changing environment,
not all changes can be foreseen at design-time and
some will eventually exceed the adaptations abilities.
In pervasive systems for instance, where mobile
devices may join or leave at any time, we must
dynamically extend the metamodel to capture new
unforeseen types of devices. Besides, the API may
offer different calls to retrieve data about these new
devices. The models@runtime environment must
therefore allow for both the customisation of its
abstractions, and the customisation of the monitoring
of these abstraction.
Enactment Transformation Limitations. The en-
actment transformation automatically propagates
changes made to the target model onto the running
system. Yet, these changes may generally be en-
acted in multiple ways, which may affect the per-
formance and the quality of service (QoS) of the
running system. Classical engines supporting one
such enactment such as DiVA (Morin et al., 2009),
CLOUDMF (Ferry et al., 2014), Genie (Bencomo
et al., 2008), WComp (Ferry et al., 2009) all impli-
citly plan a sequence of concrete actions to adjust
the system. This plan is arbitrarily derived from the
difference between the desired and the current state,
and may therefore overlook more relevant options. In
complex systems, where QoS is a major concern, the
enactment transformation must allow for customiza-
tion of the adaptation plan.
In our example, an operator who manually de-
ploys Storm would first configure the Nimbus and
the Supervisors before to connect them. Indeed, their
configuration yields files that she must then fill-in dur-
ing their connection. By contrast, in a deployment
automated with CLOUDMF, the default ordering of
actions is the opposite: the connection precedes the
configuration. However, CLOUDMF forbids modify-
ing how such a change is enacted on the running sys-
tem.
4 META-ADAPTATION
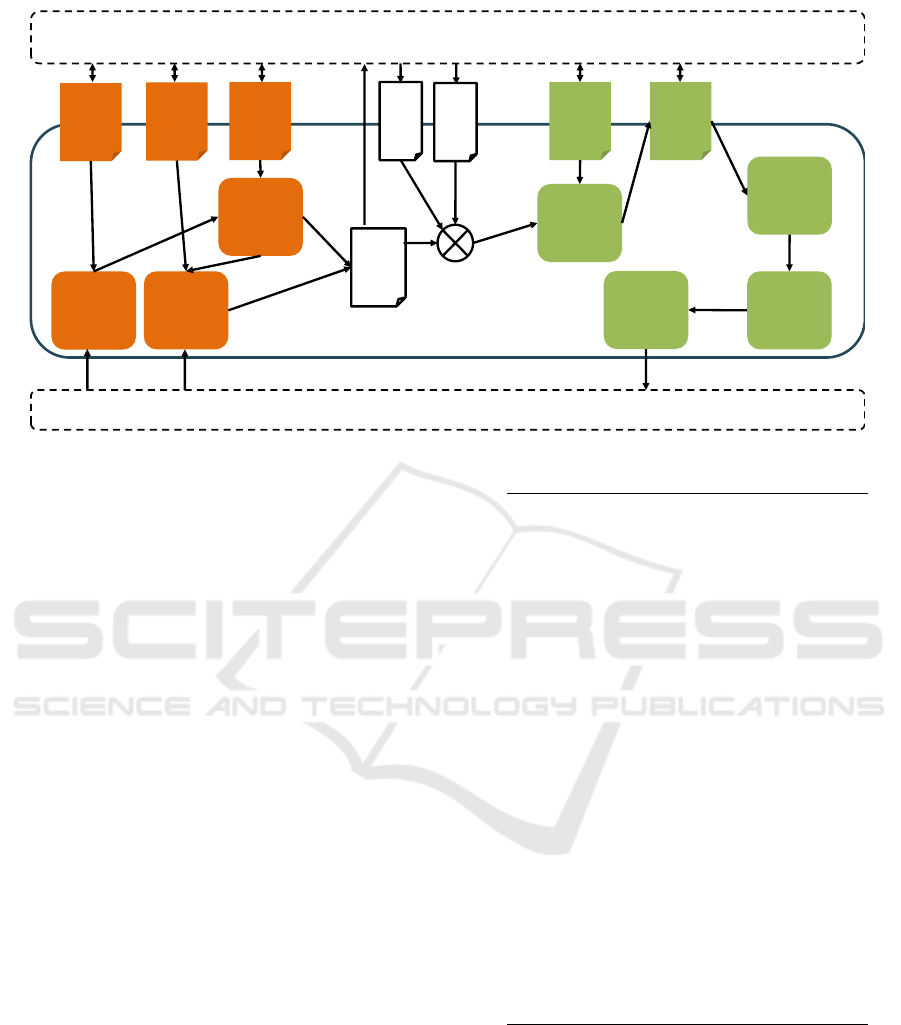
In order to overcome these limitations, we evolved
the classical models@runtime architecture as depic-
ted in Fig. 2. The green boxes relate to the enactment
transformation, the orange boxes to the monitoring
transformation, and the white boxes to the adaptation
transformation. We detail below how we evolved the
monitoring and enactment transformations.
4.1 Adaptable Monitoring
Observers gather specific information such as the
status and properties of specific components in the
system. When new entities join or leave, or when
new properties have to be tracked, the set of observ-
ers is modified accordingly. Specific observers are re-
sponsible for observing the appearance and disappear-
ance of new components in the running system and
are called meta-monitoring components. Informa-
tion from both the observers and the meta-monitoring
components are sent to the Maintainer. The latter is
responsible for combining the changes observed in
the running system and updating the current model
accordingly as well as for managing the set of observ-
ers.
At the current moment, we implemented the
monitoring transformation in the context of the
Broker@Cloud project by extending the DiVA frame-
work (Morin et al., 2009). In particular, the frame-
work offers the cloud service brokering platform
presented in Sec. 2. Such brokering mechanism calls
for adaptable monitoring transformation as the broker
allows service providers to register new services, re-
set relationships between services, and introduce new
types of property.
The proposed models@runtime environment en-
compasses two types of observers: complex-
event processing observers and SPARQL observ-
ers. Complex-event processing observers exploit the
broker@cloud publish-subscribe architecture. New
events are published for any change in the broker (i.e.,
new service for meta-monitoring) or in the registered
service (e.g., CPU usage). When a series of events
conforms to a particular pattern, the observer creates
a new event (e.g., a workload event). The pattern and
the new event are specified in the monitoring rules.
SPARQL observers query the service specifications
to deduce higher level information. These two types
of observers generated more abstract knowledge from
raw data. This is especially relevant when data avail-
able in the system APIs differs from what is needed
in the runtime model.
We implemented the maintenance mechanism in
Towards Meta-adaptation of Dynamic Adaptive Systems with Models@Runtime
505
s
Technology for a better society
RunningSystem
Current
Model
Adaptation
Action
Executor
Target
Model
Diff
(9)
Reasoningengine(s)/Editor(s)
Adaptation
Plan
Generator
PlanValidator
Plan
Execution
Engine
Adaptation
Plan
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
Transfor‐
mations
Trigger
Observers
Meta‐
monitoring
Maintenance
Meta‐
monitoring
rules
Monitoring
Rules
Maintenan
cerules
Figure 2: Evolved models@runtime architecture.
a metamodel-driven way. As Fig. 3 shows, we add
annotations to the metamodel of the runtime model.
These annotations specify how the changes of differ-
ent kinds of elements, attributes, and references in
the model relate to the system changes obtained via
events or queries.
The maintenance mechanism coordinates all the
annotations based on the following principles. 1)
Once launched, the engine initiates an element in the
root type. 2) When any event is captured, it looks for
the classes with a @create annotation matching this
event, and create an element for each of these classes.
If the name of the new element already refer to an
existing element, it simply merges them. 3) For any
newly created element, it finds the @query annotation
and trigger the query. 4) For any captured event, it
looks through all the model elements whose type has
an annotation matching the event. For each of these
elements, it updates their corresponding attributes or
references based on the event.
In future work, and in order to ease the control and
adaptation of the maintenance mechanism, an aspect-
oriented approach (Kiczales, 1996) could be exploited
in order to dynamically weave the annotations into the
metamodel of the runtime model.
4.2 Adaptable Enactment
The enactment transformation implements the follow-
ing approach. First, the models@runtime environ-
ment derives a tentative adaptation plan from a target
model describing the desired system state. The user
or a reasoning engine can then adjust it. This con-
1 class Variant{
2 @create on newsrv(?srvname)
3 @query qdim($srvname)
4 name: String {@id, @value=srvname}
5 for $p in owner.owner.properties:
6 @query qpval(name, $p.name)
7 @query qpval(name, $pname)
8 on newprop(?pname)
9 ref propvalue: PropValue* {
10 on qpvalo(!name, ?propname, ?v)
11 @value += PropValue{
12 name = $propname,
13 value = $v }
14 }
15 on impfailure(!name, ?value)
16 @value += PropValue{
17 prop="failurelikelihood",
18 value=?value}
19 }
20 }
21 class Dimension{
22 @create on qdim(?srvname, ?modname)
23 name: String{@id, @value=$modname}
24 ref variant:Variant{
25 @value += Variant{name=$srvname}}
26 }
Figure 3: Meta-model-driven specification of monitoring
transformation.
solidated adaptation plan is then fed in the adaptation
engine, which is responsible for its execution. In case
the runtime model is already synchronised with the
running system, the engine first compares the actual
and the desired system states and then derives a tent-
ative adaptation plan, which can be modified before
being enacted.
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
506
We propose the process shown by the green boxes
in Fig. 2. Once a target model is available (Step
3), it is compared to the current model (if there is
one). By contrast with the classical approach, the
result of this comparison, the diff (or the target, if
there is no current model), is then fed to an adapta-
tion plan generator (Step 4), which applies predefined
rules to produce an initial adaptation plan (Step 5),
open for modifications (manual or automated). Once
this plan is confirmed, it can be validated (Step 6) be-
fore the execution engine then triggers its atomic ac-
tions (Steps 7 and 8) to adapt the running system (step
9). As a result, this approach enables controlling and
tuning the adaptation plans as well as the engine that
is responsible for generating adaptation plans.
Engines that generate adaptation plans typically
depend on the domain of the models@runtime engine.
Currently, we have implemented the enactment
transformation in the context of the CLOUDMF pro-
ject (Ferry et al., 2014)
2
. In our motivating example,
we created a transformation that generates an adapta-
tion plan from a CLOUDML model or from the com-
parison of two CLOUDML models. Contrary to the
adaptation plan, this transformation currently cannot
be changed at runtime.
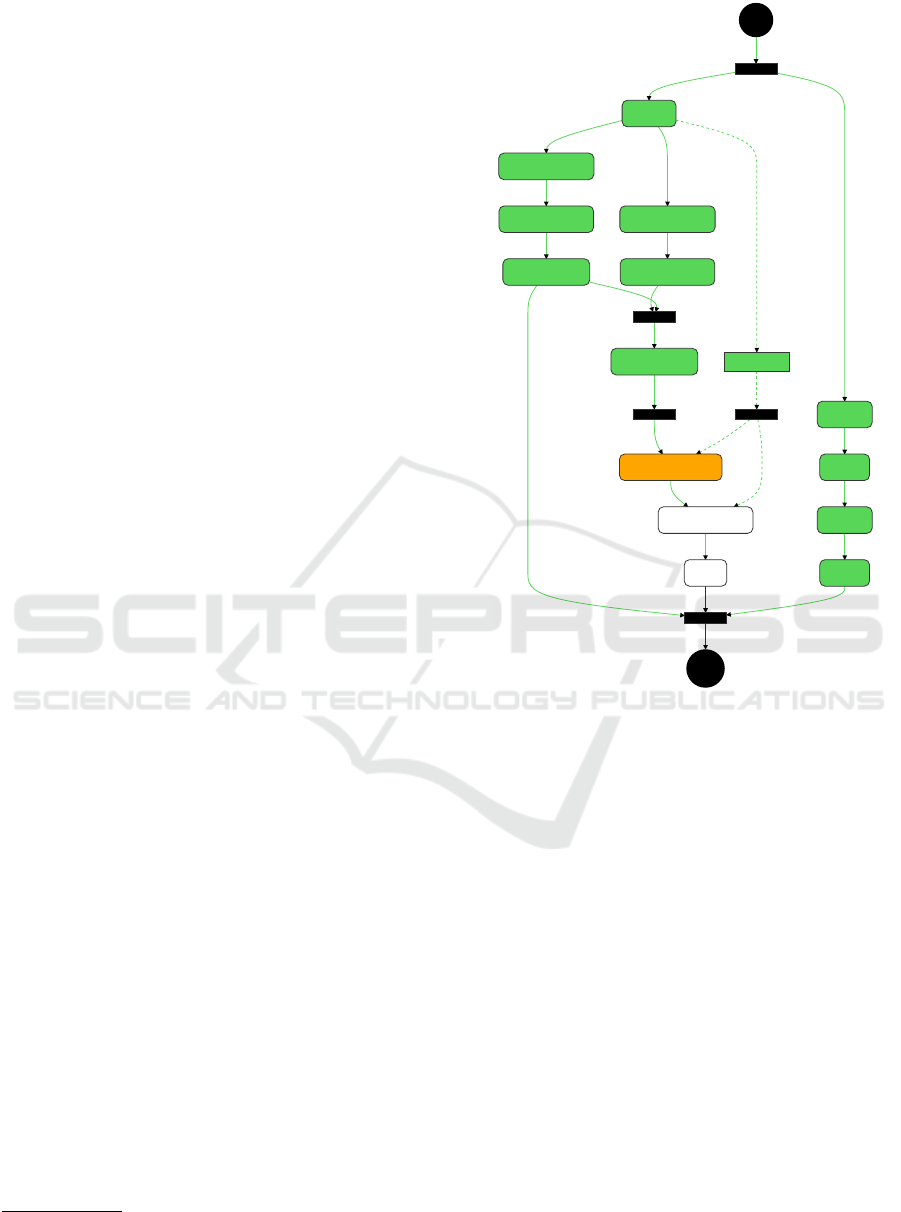
Our language to model and edit adaptation plans
reuses a subset of the UML 2.0 activity diagrams.
Fig. 4 depicts the adaptation plan that deploys our
sensor data storage application. This language and
its execution engine are generic and apply to different
domains.
Once a valid adaptation plan is ready, the adapta-
tion engine executes every Action following parallel
branches and synchronisation. This engine relies on
the Java Reflection mechanism to ensure independ-
ence of both the language and the execution engine
from the domain on which the models@runtime en-
vironment is applied. Each action within an adapt-
ation plan refers to a method that will enact the ad-
aptation, the execution engine thus uses reflection to
invoke the specified method.
5 RELATED WORK
Projects such as DiVA (Morin et al., 2009), and
Genie (Bencomo et al., 2008), CLOUDMF (Ferry
et al., 2014), which adapt software architectures, all
rely on the classical models@runtime described in
Sec. 3. From the difference between the runtime
and target models, a comparison engine identifies
2
Available at https://github.com/SINTEF-9012/
cloudml/
Deployment plan in real time
A DOT file representing this plan
node_0
provisionAVM
sensapp-ml2
Public Addresses
executeUploadCommands
jettySC1
executeRetrieveCommand
jettySC1
executeInstallCommand
jettySC1
executeUploadCommands
sensApp1
executeRetrieveCommand
sensApp1
executeInstallCommand
sensApp1
configure:connectionRetrieve
sensAppAdmin1
configure:connectionInstall
sensAppAdmin1
start
sensApp1
uninstall
old-jettySC1
uninstall
old-sensApp1
stop
old-jettySC1
stop
old-sensApp1
node_16
Figure 4: Adaptation plan.
what sequence of adaptation actions will reach the
desired configuration. Similar approaches also exist
at a lower level of abstraction such as (Cazzola et al.,
2013), which updates Java Software at runtime. As
opposed to our approach, this work does not enable
the runtime orchestration and adaptation of the list of
adaptation actions.
For the enactment transformation, Kevoree (Fou-
quet et al., 2012) exploits the concept of adaptation
primitives that follows the type-instance pattern and
offers a mechanism for dynamically adding/removing
such primitives, e.g., defining how to deploy a mod-
ule.
The Sm@rt (Supporting Models@Runtime)
framework (Song et al., 2010) helps developers build
a runtime component model on top of legacy systems.
Developers first define the metamodel that specifies
the types of elements that compose the running
system and their relationships. Next, they annotate it
with the relationships between the model operations
(e.g., create, get or set) and the system’s management
API. Sm@rt then automatically generates the engine
Towards Meta-adaptation of Dynamic Adaptive Systems with Models@Runtime
507

that synchronises the model and the running system.
Although developers can tune how models updates
relate to the system’s adaptation actions, these actions
cannot be orchestrated at runtime.
The EUREMA (Vogel and Giese, 2014) frame-
work supports the design and adaptation of self-
adaptive systems that may involve multiple feedback
loops. Developers explicitly model these feedback
loops, their runtime models, their usage, the flow
of models operations as well as the relationships
between these models. These models are kept alive
at runtime and can be evolved. This approach does
not offer explicit support for controlling the monitor-
ing and enactment transformations. These transform-
ations could however be modelled as a feedback loops
thus making our work complementary.
6 CONCLUSION AND FUTURE
WORK
We presented above an evolution of the classical
models@run-time pattern to better manage the be-
haviour of a models@runtime environment and, in
particular, how the runtime model is synchronised
with the running system. This requires control over
both the monitoring and enactment transformations.
We also described an initial implementation of these
mechanisms.
In future work we will focus on developing a
single models@runtime environment that fully im-
plements the architecture depicted in Fig. 2, while
also handling errors and transactions. In addition,
we plan to apply the mechanism to multi-layered ar-
chitecture. Multi-layered architectures (Sykes et al.,
2008) provide self-adaptive systems with the ability to
adapt themselve to unforeseen circumstances. They
advocates that the layer n + 1 reconfigures the layer
n underneath, recursively until the running system.
However, this multi-layered architecture does not fit
the classical models@runtime approach. The limited
control over monitoring and enactment prevents the
self-adaptive system to change its own adaptation be-
haviour. The extensions we propose allows to over-
come this issue.
ACKNOWLEDGEMENTS
This research has received funding from the European
Community’s FP7 (2007-2013) and H2020 Programs
under grant agreement numbers: FoF-2015.680478
(MC-Suite) and 645372 (ARCADIA).
REFERENCES
Bencomo, N., Grace, P., Flores, C., Hughes, D., and Blair,
G. (2008). Genie: Supporting the model driven devel-
opment of reflective, component-based adaptive sys-
tems. In ICSE, pages 811–814. ACM.
Blair, G., Bencomo, N., and France, R. (2009). Mod-
els@run.time. IEEE Computer, 42(10):22–27.
Cazzola, W., Rossini, N. A., Al-Refai, M., and France, R. B.
(2013). Fine-grained software evolution using uml
activity and class models. In Model-Driven Engineer-
ing Languages and Systems, pages 271–286. Springer.
de Lemos, R., Giese, H., Müller, H. A., and et al, M. S.
(2010). Software Engineering for Self-Adaptive Sys-
tems: A Second Research Roadmap. In de Lemos, R.,
Giese, H., Müller, H. A., and Shaw, M., editors, Soft-
ware Engineering for Self-Adaptive Systems II - Inter-
national Seminar, volume 7475 of LNCS. Springer.
Ferry, N., Hourdin, V., Lavirotte, S., Rey, G., Tigli, J.-Y.,
and Riveill, M. (2009). Models at runtime: service for
device composition and adaptation. In Proceedings
of the 4th International Workshop on Models@ run.
time.
Ferry, N., Song, H., Rossini, A., Chauvel, F., and Solberg,
A. (2014). CloudMF: Applying MDE to Tame the
Complexity of Managing Multi-Cloud Applications.
In Proceedings of IEEE/ACM UCC.
Fouquet, F., Morin, B., Fleurey, F., Barais, O., Plouzeau,
N., and Jezequel, J.-M. (2012). A dynamic compon-
ent model for cyber physical systems. In Proceedings
of the 15th ACM SIGSOFT symposium on Component
Based Software Engineering, pages 135–144. ACM.
France, R. and Rumpe, B. (2007). Model-driven develop-
ment of complex software: A research roadmap. In
2007 Future of Software Engineering, pages 37–54.
IEEE Computer Society.
Kiczales, G. (1996). Aspect-oriented programming. ACM
Comput. Surv., 28(4es).
Mainsah, E. (2002). Autonomic computing: the next era of
computing. Electronics Communication Engineering
Journal, 14(1):2–3.
Morin, B., Barais, O., Jezequel, J., Fleurey, F., and Solberg,
A. (2009). Models@ run. time to support dynamic
adaptation. Computer, 42(10):44–51.
Song, H., Xiong, Y., Chauvel, F., Huang, G., Hu, Z.,
and Mei, H. (2010). Generating synchronization en-
gines between running systems and their model-based
views. In Models in Software Engineering, pages 140–
154. Springer.
Sykes, D., Heaven, W., Magee, J., and Kramer, J. (2008).
From goals to components: a combined approach to
self-management. In Proceedings of the 2008 interna-
tional workshop on Software engineering for adaptive
and self-managing systems, pages 1–8. ACM.
Vogel, T. and Giese, H. (2014). Model-driven engineering
of self-adaptive software with eurema. ACM Transac-
tions on Autonomous and Adaptive Systems (TAAS),
8(4):18.
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
508
