
Design of a Bilaterally Asymmetric Pedaling Machine and its Measuring
System for Medical Rehabilitation
Jinhua She
1,2,3
, Fajian Wu
1
, Hiroshi Hashimoto
4
, Toshihiro Mita
1
and Min Wu
2,3
1
Graduate School of Tokyo University of Technology, Hachioji, Tokyo 192-0982, Japan
2
School of Automation, China University of Geosciences, Wuhan, Hubei 430074, China
3
Hubei Key Laboratory of Advanced Control and Intelligent Automation for Complex Systems,
Wuhan, Hubei 430074, China
4
Master Program of Innovation for Design & Engineering, Advanced Institute of Industrial Technology,
Shinagawa-ku, Tokyo 140-0011, Japan
Keywords:
Bilateral Asymmetry, Lower Limb, Human Adaptation, Pedaling, Medical Rehabilitation.
Abstract:
Most commercially available rehabilitation machines are bilateral symmetric. This makes it difficult to use
for people with lower-limb injuries. This paper explains the design of a bilaterally asymmetric pedaling
machine and its measuring system to solve this problem. Pedaling angles, strokes, and force of this machine
can easily be adjusted independently for the left and right legs. Pedaling force and strokes, heart rate, and
electromyogram (EMS) signals of walking muscles are recorded using a measuring system. This ensures
the interaction between lower-limb exercises, and the computer-based supervision and control of medical
rehabilitation. A prototype of a half model of the machine was built. Preliminary tests for the basic functions
were carried out and demonstrated the validity of the machine and the measuring system.
1 INTRODUCTION
The number of the elderly (people aged 65 or older)
in Japan was 34.63 million at October 1, 2016, which
was 27.3% in the percentage of population (Statistics
Bureau, 2016). Total spending of the nursing-care in-
surance system was 31.5trillion yen in financial 2015,
which was as high as 32.7% of the annual expenditure
(Murayama, 2015). This caused a big burden for the
society. Statistics shows that more than one in three
Japanese will be the elderly and one in five will be 75
years old or older by 2025, and the number of peo-
ple in Japan needing rehabilitation will be keeping in-
creasing in the next decade. This has been called the
2025 problem (Ministry of Health, Labour and Wel-
fare, 2016). It has been becoming imperative for the
government to find a way to solve the nursing-care
problem.
Walking is a basic action of daily life. Maintaining
or improving the physical strength of walking mus-
cles prevents the degradation of motor functions, and
promotes the mental and physical health of the el-
derly. This eventually benefits the whole society.
Considering that pedaling is an effective exer-
cise for the walking muscles, we developed a new-
concept electric cart to integrate an exercise function
into the ability of old people to get around (She et al.,
2006). Unlike the commercially available carts, this
one mounted a pedal unit on the cart. It has two ped-
als and a pedal motor that generates a pedal load for a
driver. The speed of the pedal motor is determined by
the driver’s efforts, and constitutes a reference input
for the cart. The speed of the cart motor tracks that
reference. So, the experience is very similar to riding
a bicycle. To improve the effectiveness of pedaling as
a kind of exercise, we devised a mechanism that au-
tomatically selects a suitable load for the driver (She
et al., 2013). And many other pedaling-type rehabil-
itation machines, for example, (Anzai, 2014), have
also been developed. However, almost all of these
machines have the following problems:
1. the pedaling loads and strokes are bisymmetric;
and
2. the structure of the machines is fixed.
So, they are not suitable for people with asymmetrical
ability for left and right limbs. As a result, people
have to adapt themselves to the machines, or in other
words, this kind of rehabilitation is machine centered.
This not only may cause a great pain in rehabilitation,
122
She J., Wu F., Hashimoto H., Mita T. and Wu M.
Design of a Bilaterally Asymmetric Pedaling Machine and its Measuring System for Medical Rehabilitation.
DOI: 10.5220/0006215101220127
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 122-127
ISBN: 978-989-758-229-5
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Statistics of average leg-extension force while seated (numbers in parentheses are standard deviations) (Sato, 1994).
One leg Right leg Left leg Subject
Man
2729 (506)
46 Jap. univ. students at Dept. Health
& Sport Sciences (18-24 y/o)
2067 (498) 1897 (478) Swedish
2887 (506) Dane
Woman
1260 (291) 1240 (303) Swedish
2133 (415) Dane
but also may degrade the will to rehabilitation.
Some studies have taken the bilateral asymmetry
into consideration. For example, the relationship be-
tween asymmetry and lower limb preference was ex-
amined (Carpes et al., 2010), and asymmetrical pedal-
ing patterns in Parkinson’s disease patients were mea-
sured in (Penko et al., 2014). However, they did not
consider the asymmetrical problem from the view-
point of the design of a rehabilitation machine.
To solve the problems, we developed a new kind
of a pedaling machine for rehabilitation (She et al.,
2016a; She et al., 2016b). Unlike other ones, it is hu-
man centered, that is, the structure of the machine is
variable, and is adaptable to different lower-limb re-
quirements. The pedaling loads and strokes can also
be adjusted independently. This ensures the durabil-
ity of rehabilitation and improve the efficiency of re-
habilitation. The combination of a bilaterally asym-
metric pedaling mechanism and a measuring system
makes it possible to carry out the interaction between
lower-limb exercises and the computer-based super-
vision and control of medical rehabilitation.
While the design of the mechanism of the pedal-
ing machine was explained in (She et al., 2016a; She
et al., 2016b), this paper explains the design of the
machine and the measuring system for pedaling, and
reports the results of some preliminary tests.
2 BASIC REQUIREMENTS FOR
PEDALING EXERCISE AND
MEASURING SYSTEM
The requirements for pedaling exercise are first con-
sidered.
Rehabilitation is basically divided into three
stages: acute stage (1-14 days), recovery stage (up to
several months), and functional stage (several months
to years) (Dugan, 2006). This study focused on pro-
viding a means for the last stage, that is, for the func-
tional stage.
Since pedaling is an effective exercise to train the
walking muscles, we tried to build a new type of ped-
aling machine. There are two types of pedaling: ro-
tational and linear. Considering that a rotational ped-
aling motion is basically bisymmetric, it is not suit-
able for people with lower-limb injuries. On the other
hand, note that a linear pedaling motion can easily
be used to design an asymmetrical mechanism to suit
different requirements for left and right lower-limbs,
we used it for the development of the rehabilitation
machine in this study.
After fixing the pedaling mechanism, we turn to
choose parameters for the pedaling. First, we select
a pedaling force. Note that the maximum of the av-
erage leg-extension force of one leg is about 2900 N
for young people (Table 1) (Sato, 1994). Since the leg
strength reaches its peak at 20s and then it decreases
with aging (Sato, 1994), and people who need reha-
bilitation have weak legs and are mainly in the middle
aged and elderly, it is enough to choose the maximum
force for pedaling to be
P
max
= 2000 N. (1)
Next, we select the parameters for pedaling stroke.
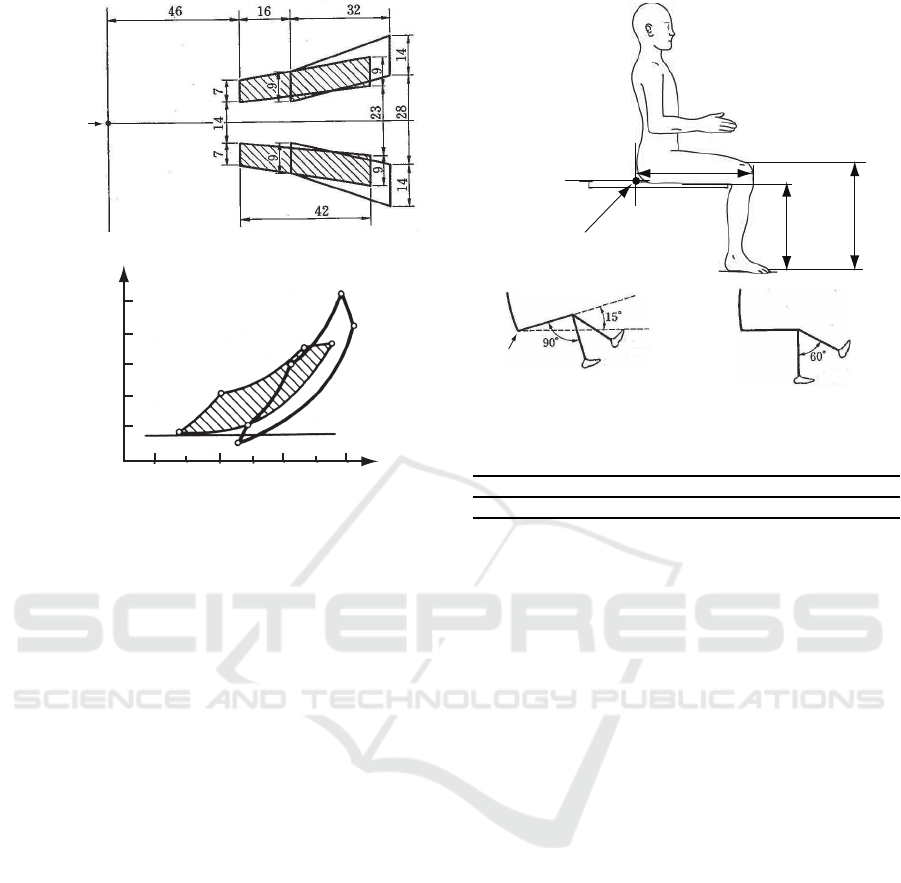
As pointed out in (Sato, 1994), ergonomicsshows that
there is an optimal pedaling region. It is given in Fig-
ure 1 for the definitions in Figure 2. For the optimal
region, the angle between the femur and the lower leg
is in the range [15
◦
, 90
◦
] when the knee is at the clos-
est position to the body, and [30
◦
, 90
◦
] when the knee
at the farthest position from the body. Considering
that a person needs rehabilitation may not sit and/or
pedal properly as a normal person does, and referring
to the results in (Timmer, 1991; Johnston, 2007), we
chose the angle between the femur and the lower leg
to be
θ ∈ [0
◦
, 90
◦
]. (2)
Equation (2) provides us a larger region than the opti-
mal one. This gives us a big freedom to suit different
kinds of requirements.
The stroke of a linear motion should also be cho-
sen to be long enough. It was chosen to be
L = 150 mm (3)
based on a preliminary test.
As for the design of the measuring system, the fol-
lowing points need to be considered:
Design of a Bilaterally Asymmetric Pedaling Machine and its Measuring System for Medical Rehabilitation
123
Max:
Max:
Seat reference
point
a
d
b
e
A
B
E
D
−40
−30
−20
−10
0
6040 80 100
Distance forward of
seat reference point [cm]
Distance below
seat reference point [cm]
Floor
(a)
(b)
Figure 1: Optimal pedaling region. (a) Top view and (b)
Side view (Upper case: heel. Lower case: toe) (Sato, 1994;
She et al., 2006).
• Measured data are suitably stored in a real-time
fashion.
• Measured data can easily be accessed.
• Measured data are displayed in a real-time fash-
ion, and it is easy to switch to the display of inter-
ested data.
• Data can be synchronized if needed.
3 DESIGN OF PEDALING
MECHANISM AND
MEASURING SYSTEM
A pedaling mechanism is designed in this section that
satisfies the requirements given in Section 2.
An oil damper, KINECHECK Super K (Meiyu
Airmatic Co. Ltd., Japan) (Table 2) was selected to
provide a pedaling load. It produces the largest damp-
ing force, and has the longest stroke in the class of
small dampers. While the maximum force is more
than the double of P
max
in (1), the stroke is only 70%
of L in (3). To ensure that the requirements (1)-(3) are
satisfied, a half model of a pulley-type pedaling mech-
anism was designed in Figure 3. It enlarges the stroke
Height of
knee
Hip-knee
distance
Seat reference
point
Height of
seat
Horizontal line
Near high point
Near low point
Far high point
Far low point
Seat reference
point
Figure 2: Definitions (Sato, 1994; She et al., 2006).
Table 2: Parameters of oil damper, KINECHECK Super K.
Model Overall length Stroke Force range
5001-31-4 356 mm 102 mm 23 ∼ 5440 N
doubly and reducing the load force to half. To ensure
(2), an adjusting part was designed and installed in the
machine. The inclined angle of the adjusting part can
be changed from 0
◦
to 90
◦
. A prototype of the pulley
mechanism for one leg was first built for evaluation
(Figure 5).
As for the measuring system, we chose the heart
rate meter to be neo HR-40 (NISSEI Co. Ltd., Japan),
the force sensor to be LPR-C-1KNS15 and the dis-
placement sensor to be DTS-A-100 (Kyowa Elec-
tronic Instruments Co. Ltd., Japan), and the wireless
EMS sensor to be SX230-1000 and a 9-axes wireless
motion sensor (XYZ geomagnetism, XYZ accelera-
tion, and XYZ angular acceleration) (DKH, Japan).
And we constructed the measuring system as shown
in Figures 4 and 6.
The measuring system is used to supervise exer-
cises and to perform the interaction between the ex-
ercises and the computer-based control of rehabilita-
tion. It is important to select a suitable pedaling load
for a user based on the user’s physical condition. In
this study, a suitable load means a pedaling load that
does not seem heavy or light and can safely be used
for endurance training (U.S. Dept. of Health and Hu-
man Services, 2008). This human-computer interac-
tion not only maintains the motivation for rehabilita-
tion, but also results in enhanced exercise outcomes
in the long term.
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
124
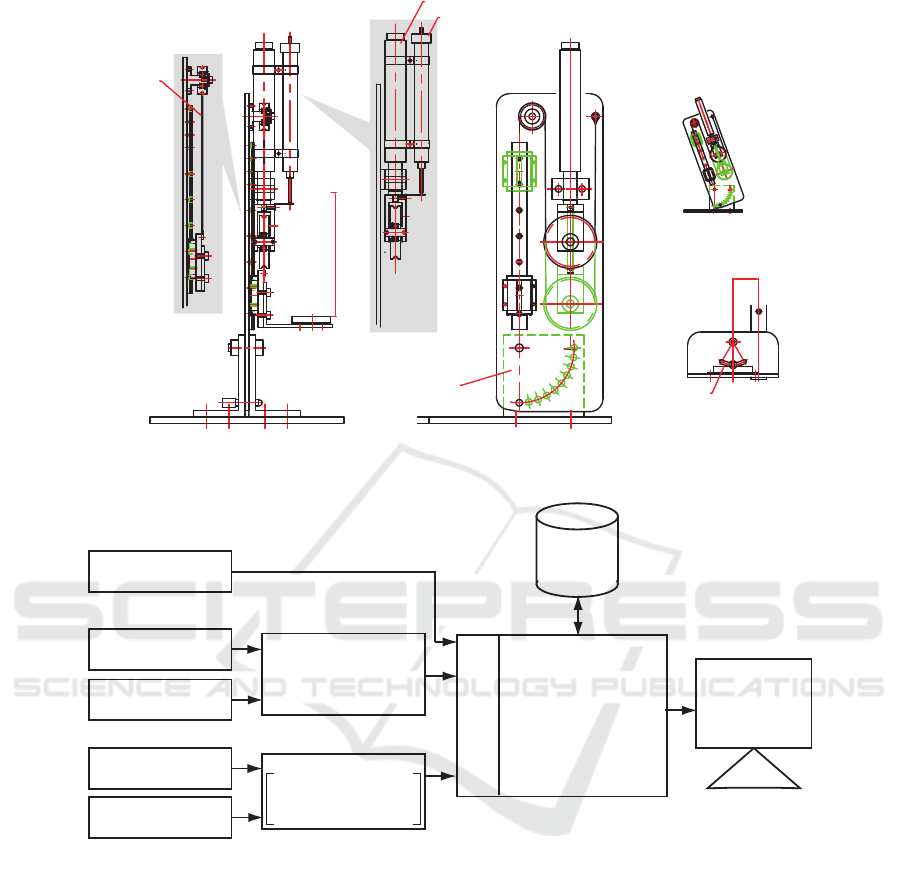
Adjusting part of
inclined angle
Stroke 192
Inclined angle: 20 deg
Oil damper
Displacement sensor
Stainless
wire
Adjusting part of
pedaling angle
40
Left lateral viewFrontal view
Figure 3: Pulley-type pedaling mechanism (half model).
Tread force sensor
(LPR-C-1KNS15)
Displacement sensor
(DTS-A-100)
Heart rate meter
(neo HR-40)
Compact recording system
(EDX-10A)
Wireless EMG sensor
(SX230-1000)
9-axes wireless
motion sensor
Wireless set
Transmitter (PH8310)
Amplifier (PH8320)
Data receiver (PH8020)
Data base
Interface
PC
(Windows 8.1)
Display
Figure 4: Measuring system.
4 PRELIMINARY TESTS
Preliminary tests were carried out for the half model
and the measuring system for three subjects. The ped-
aling force was set in the range of 0-270 N (Level 0:
23 N; 3: 50 N; 6: 90 N; 9: 140 N; 12: 200 N; and 15:
270 N); and the angle of the inclined angle adjusting
part, 0-90
◦
. The sampling period of the measuring
system was set to be 0.02 s. Test results show that
the machine and the measuring system worked well
as designed. The sensors produced outputs correctly
for all the pedaling activities. It was found that pedal-
ing was carried out smoothly and comfortably for the
inclined angle in the range [40
◦
, 70
◦
]. Some typical
pedaling results are shown in Figure 7. As shown in
the figure, the pedaling period is the shortest and the
pedaling force is the largest for 60
◦
among the three
angles. This indicates that the inclined angle of 60
◦
is
the easiest one for pedaling.
Among the measured four EMG signals (quadri-
ceps femoris, biceps, soleus, and tibialis anterior),
that of quadriceps femoris is the largest, and that of
soleus is the smallest (Figure 8).
Design of a Bilaterally Asymmetric Pedaling Machine and its Measuring System for Medical Rehabilitation
125
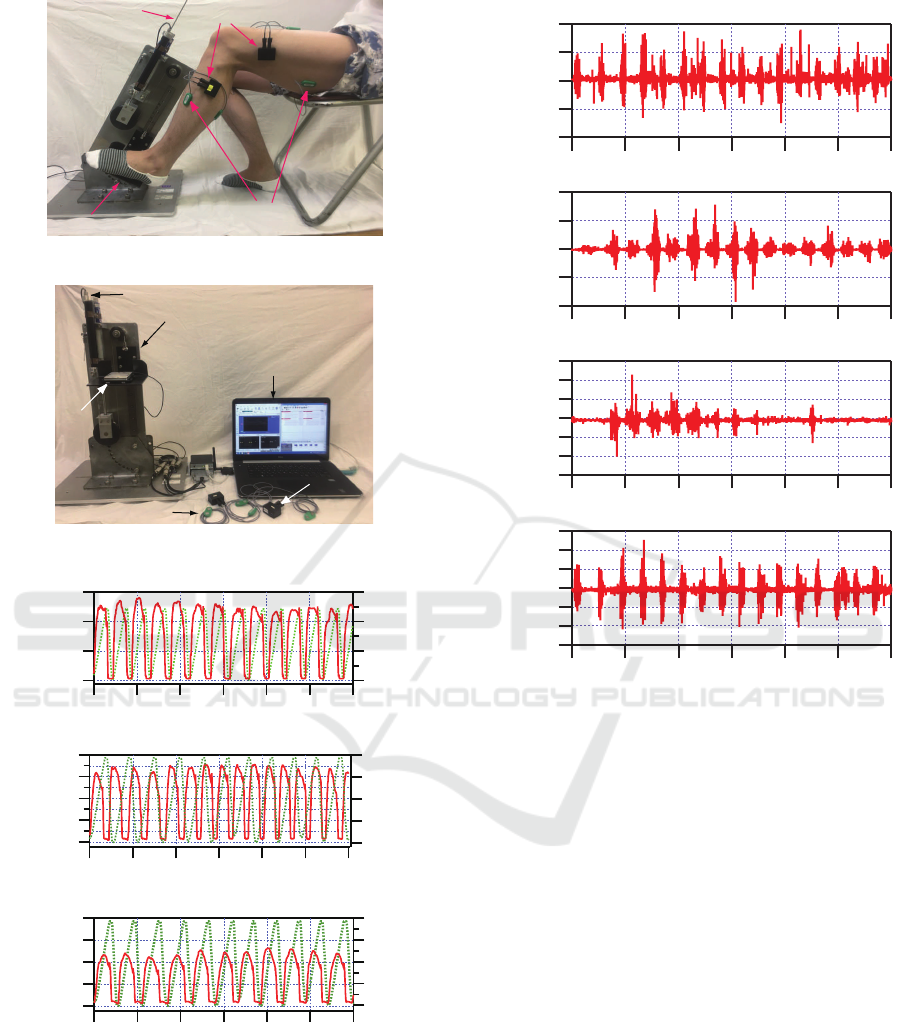
EMG sensor
Transmitter
Force sensor
Displacement
sensor
Figure 5: A photo of experimental system.
Pedaling machine
Force
sensor
Displacement sensor
EMG sensor
Wireless module
Measuring screen
Figure 6: A photo of some components of measuring sys-
tem.
200
150
100
50
0
Dsplacement
(dotted) [mm]
6050403020100
Time [s]
160
120
80
40
0
Force (solid) [N]
160
120
80
40
0
Dsplacement
(dotted) [mm]
6050403020100
200
150
100
50
0
Force (solid) [N]
240
160
80
0
Dsplacement
(dotted) [mm]
6050403020100
120
80
40
0
Force (solid) [N]
(a)
(b)
(c)
Time [s]
Time [s]
Figure 7: Pedaling results for Load 9 (140 N) and inclined
angle of (a) 40
◦
, (b) 60
◦
, and (c) 80
◦
.
5 CONCLUSION
A new type of a bilaterally asymmetric rehabilitation
machine and its measuring system were designed in
-0.2
-0.1
0.0
0.1
0.2
Quadriceps femoris [mV]
6050403020100
-0.2
-0.1
0.0
0.1
0.2
Biceps femoris [mV]
6050403020100
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
Soleus [mV]
6050403020100
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
Tibialis anterior [mV]
6050403020100
Time [s]
Figure 8: EMG signals for Load 9 (140 N) and inclined
angle of 60
◦
.
this study. The machine is a linear pedaling type.
This ensures that a user can easily and independently
adjust the pedaling pose, pedaling displacement, etc.
in an asymmetrical fashion. Preliminary tests for the
basic functions have been tested, and the test results
demonstrated the feasibility of the machine.
We planned to use the mechanism and the measur-
ing system to carry out the verification of the effec-
tiveness of the system for the rehabilitation of lower
limbs, and to examine the interaction between lower-
limb exercises, and the computer-based supervision
and control of medical rehabilitation. The perfor-
mance indexes used in (Smak et al., 1999; Carpes
et al., 2010) will be integrated to evaluate the lat-
eral asymmetry and the effectiveness of pedaling for
rehabilitation. Now, we are collecting normal sub-
jects (mainly university students) to carry out a full
test for the prototype. Then, we plan to investigate
the effect of rehabilitation from the viewpoints of
human-computer interaction, physiotherapy, exercise
psychology, etc. After the analysis, we plan to invite
HUCAPP 2017 - International Conference on Human Computer Interaction Theory and Applications
126

people with lower-limb injuries to test the effective-
ness of the system. Those results will be reported in
the near future.
ACKNOWLEDGEMENTS
This work was supported by Japan Society for the
Promotion of Science (JSPS) KAKENHI Grant Num-
bers 26350673, 16H02883, by the National Natural
Science Foundation of China under Grants 61473313
and 61210011, by the Hubei Provincial Natural Sci-
ence Foundation of China under Grant 2015CFA010,
and by the 111 Project, China under Grant B17040.
REFERENCES
S. Anzai (2014). Healthy Cycle: A Leg-
Powered Wheelchair from Japan Is Motivat-
ing the Disabled, Highlighting Japan, no.
11, pp. 20-21. Available: http://dwl.gov-
online.go.jp/video/cao/dl/public
html/gov/pdf/hlj/
20141101/20-21.pdf
F. P. Carpes, C. B. Mota, and I. E. Faria (2010). On the
bilateral asymmetry during running and cycling – A
review considering leg preference Physical Therapy
in Sport, no. 11, pp. 136-142.
S. A. Dugan (2006). Exercise in the Rehabilitation of the
Athlete, in W. R. Frontera, S. A. Herring, L. J. Micheli,
and J. K. Silver Ed., Clinical Sports Medicine: Med-
ical Management and Rehabilitation, Saunders, Else-
vier.
Ministry of Health, Labour and Welfare (2016). Survey
of Long-term Care Benefit Expenditures, Avail-
able: http://www.mhlw.go.jp/english/database/db-
hss/soltcbe.html
T. E. Johnston (2007). Biomechanical Considerations for
Cycling Interventions in Rehabilitation, Physical
Therapy, vol. 87, no. 9, pp. 1243-1252
H. Murayama (2015). Nani ga zaiseiakazi kakudai no
gennin ka (What’s the cause of the expansion
of the fiscal deficit) Economic Report, Avail-
able: http://www.kyotobank.co.jp/houjin/report/pdf/
201505
02.pdf
A. L. Penko, J. R. Hirsch, C. Voelcker-Rehage, P. E. Mar-
tin, G. Blackburn, and J. L. Alberts (2014). Asymmet-
rical pedaling patterns in Parkinson’s disease patients,
Clinical Biomechanics, vol. 29, pp. 1089-1094.
M. Sato (1994). Ningen Kougaku Kijun Suuchi Suushiki
Benran (Handbook of ergonomic standards, numeri-
cal values, and formulas), Tokyo: Gihodo Shuppan
Co., Ltd.
Statistics Bureau (2016). Monthly Report: Population Es-
timates by Age (5-Year Age Group) and Sex, Avail-
able: http://www.stat.go.jp/english/data/jinsui/tsuki/
index.htm
J. She, Y. Ohyama, and H. Kobayashi (2006). Master-
Slave Electric Cart Control System for Maintain-
ing/Improving Physical Strength, IEEE Trans. Robot.,
vol. 22, no. 3, pp. 481-490.
J. She, S. Yokota, and E. Y. Du (2013). Automatic heart-
rate-based selection of pedal load and control system
for electric cart, Mechatronics, vol. 23, pp. 279-288.
J. She, F. Wu, T. Mita, H. Hashimoto, and M. Wu (2016a).
Design of a New Human-Centered Rehabilitation Ma-
chine, Proc. 9th ACM Int. Conf. Pervasive Technolo-
gies Related to Assistive Environments (PETRA 2016),
Corfe, Greece.
J. She, F. Wu, T. Mita, H. Hashimoto, and M. Wu (2016b).
Design of Human-Centered Rehabilitation Machines
for Lower Limbs, Proc. IEEE-NIH 2016 Special Top-
ics Conf. Healthcare Innovations and Point-of-Care
Technologies (HI-POCT 2016), Cancun, Mexico.
W. Smak, R. R. Neptune, and M. L. Hull (1999). The in-
fluence of pedaling rate on bilateral asymmetry in cy-
cling, J. Biomechanics, vol. 32, pp. 899-906.
C. A. W. Timmer (1991). Cycling Biomechanics: A Litera-
ture Review, J. Orthopaedic & Sports Physical Ther-
apy, vol. 14, no. 3, pp. 106-113
U.S. Dept. Health and Human Services (2008). Exercise:
a guide from the national institute on aging, National
Institute of Health. Available: http://www.nia.nih.gov/
Design of a Bilaterally Asymmetric Pedaling Machine and its Measuring System for Medical Rehabilitation
127
