
Comparison between Channel Hopping and Channel Adaptation for
Industrial Wireless Sensor Networks
Ruan D. Gomes
1,2,3
, Marcelo S. Alencar
1
, Diego V. Queiroz
3
,
Iguatemi E. Fonseca
4
and Cesar Benavente-Peces
3
1
Post-Graduate Program in Electrical Engineering, Federal University of Campina Grande, Campina Grande, Brazil
2
Informatics Coordination, Federal Institute of Paraiba, Guarabira, Brazil
3
Signal Theory and Communications Department, Universidad Politecnica de Madrid, Madrid, Spain
4
Informatics Center, Federal University of Paraiba, Joao Pessoa, Brazil
Keywords:
Industrial Wireless Sensor Networks, Channel Diversity, Dynamic Channel Allocation.
Abstract:
One of the differences between the new standard IEEE 802.15.4e, in comparison to the previous IEEE 802.15.4
standard, is the use of multiple channels. The Time-Slotted Channel Hopping (TSCH) mode employs channel
hopping, and the Deterministic and Synchronous Multi-channel Extension (DSME) mode employs channel
hopping or channel adaptation, during the contention free periods. When using the channel adaptation as the
channel diversity technique, a pair of nodes communicate using the same channel while the channel quality
is good enough in terms of signal-to-noise ratio. Thus, it is necessary to evaluate the quality of the links, in
order to proper use this mechanism. In this paper, three different approaches, based on the DSME protocol,
were implemented and evaluated through a simulation study. The first one (CH-DSME) is based on a simple
channel hopping mechanism, the second one (CA-DSME) employs channel adaptation, and the third one is
a novel hybrid approach (H-DSME), that uses both channel hopping and channel adaptation. The H-DSME
outperformed the other two approaches for the scenario in consideration, which shows that the use of channel
adaptation is better than channel hopping for the transmission of unicast packets, when the quality of the
links are monitored continuously. However, for packets transmitted in broadcast by the coordinator, the use of
channel hopping is a good alternative to deal with the spatial variation in the quality of the channels.
1 INTRODUCTION
The use of Wireless Sensor Networks (WSN), to im-
plement monitoring and control systems in industrial
environments, has some advantages when compared
with the use of wired networks, such as low cost and
high flexibility. However, it is necessary to deal with
typical problems of wireless systems, such as electro-
magnetic interference (Lima-Filho et al., 2012), and
industrial environment high attenuation, due to the
presence of many objects and obstructions (Tanghe
et al., 2008). Many industrial environments also
present characteristics that make the wireless channel
non-stationary, for long time periods, which can cause
abrupt changes in the characteristics of the channel
over time (Agrawal et al., 2014b).
To overcome these limitations, mechanisms that
allow the network to self-adapt to the variations that
occur in the link quality over time need to be im-
plemented, such as adaptive routing (Gnawali et al.,
2009) or dynamic channel allocation (Gomes et al.,
2014). Other important aspect is the energy consump-
tion and management, which is a key issue in indus-
trial WSN, given network motes are usually powered
by batteries. Some appropriate strategies, as energy
aware geographic routing in lossy WSN, can be de-
veloped (Anastasi et al., 2009).
Some standards have been proposed in the last
years with a focus on industrial applications, such as
the WirelessHART and the ISA100.11a. Both Wire-
lessHART and ISA100.11a are based on the physi-
cal layer of IEEE 802.15.4, but defines its own MAC
layer. Instead of using CSMA/CA, as defined by the
IEEE 802.15.4 standard, they use a MAC layer with
Time Division Multiple Access (TDMA). By using
TDMA, collisions are avoided and the power con-
sumption can be optimized. They also use frequency
hopping and blacklisting, to mitigate the problems re-
lated to interference and fading. However, without
an adequate management of the blacklist, the com-
D. Gomes R., S. Alencar M., V. Queiroz D., E. Fonseca I. and Benavente-Peces C.
Comparison between Channel Hopping and Channel Adaptation for Industrial Wireless Sensor Networks.
DOI: 10.5220/0006206800870098
In Proceedings of the 6th International Conference on Sensor Networks (SENSORNETS 2017), pages 87-98
ISBN: 421065/17
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
87

munication performance may be lower for these stan-
dards (Petersen and Carlsen, 2009).
More recently, the IEEE 802.15.4e standard was
released. The goal of this standard is to propose
solutions for applications that require high reliabil-
ity, such as industrial applications (Guglielmo et al.,
2016). Five modes of operation are defined, that
is: Time-Slotted Channel Hopping (TSCH), De-
terministic and Synchronous Multi-Channel Exten-
sion (DSME), Low Latency Deterministic Network
(LLDN), Asynchronous Multi-Channel Adaptation
(AMCA), and Radio Frequency Identification Blink
(BLINK). However, only the modes TSCH, DSME,
and LLDN have been explored in the literature until
recently. In general, the modes of the IEEE 802.15.4e
are based on TDMA or frequency hopping to reduce
collisions and mitigate the effects of interference and
fading, and to satisfy the requirements of industrial
applications in terms of reliability and determinism.
One of the main differences between the new
standard IEEE 802.15.4e in comparison to the pre-
vious IEEE 802.15.4 standard is the use of multiple
channels. The TSCH mode employs channel hop-
ping. When using this mechanism, the nodes usu-
ally switch to a new channel before each transmission,
which makes the network more robust against prob-
lems that affect only a subset of the channels. How-
ever, if a proper management of the blacklist is not
made, the network performance can be significantly
degraded (Grsu et al., 2016). In the DSME mode,
channel hopping can also be used in the contention
free periods. It is also possible to use a channel adap-
tation mechanism instead of channel hopping. When
using channel adaptation, a pair of nodes communi-
cate using only one channel during a large time pe-
riod. A channel switch only occurs when the channel
in use starts to present low quality. Thus, a procedure
is necessary to evaluate the quality of the links contin-
uously, in order to use the channel adaptation mecha-
nism properly. The implementation of this procedure
is not defined by the standard.
In this paper, the performance of three different
approaches for channel diversity, based on the DSME
mode of the IEEE 802.15.4e standard, were evalu-
ated. The first one is based on a simple channel
hopping mechanism, the second one employs chan-
nel adaptation, and the third one is a novel approach
that uses both channel hopping and channel adap-
tation. The simulations were performed using the
Castalia simulator, which is an event-driven simula-
tor for WSN. A realistic channel model was used,
which includes the effects of fading, shadowing, and
the non-stationary characteristics of the channel in in-
dustrial environments. When using this model, which
was first described in (Gomes et al., 2015b), it is
possible to observe the performance of the protocols,
considering the non-stationary behavior of the wire-
less channel in industrial environments. This simula-
tion model was also used in (Gomes et al., 2016) to
evaluate link quality estimators for industrial WSN.
2 IEEE 802.15.4e STANDARD
In networks that use the IEEE 802.15.4 standard, it is
difficult to establish strict latency boundaries, due to
the CSMA/CA protocol used in the MAC layer, since
the access to the communication medium occurs in
a distributed and random way. Hidden and exposed
terminal problems can also affect the performance of
the network, making it even more unpredictable. The
MAC protocols defined by the IEEE 802.15.4 use a
single channel for communication, which is a single
point of failure, and increases the number of collisions
in the network. Due to these limitations, the new stan-
dard IEEE 802.15.4e was proposed, for applications
with more stringent requirements of reliability and de-
terminism.
Five modes of operation are defined by the
standard, but only modes TSCH, DSME, and
LLDN have been more extensively studied until re-
cently (Guglielmo et al., 2016). Modes TSCH, DSME
and LLDN use TDMA as the channel access method,
which allows to reduce the number of collisions, and
increases the determinism of the network, since each
node has specific time slots allocated to it, and the ac-
cess can be done without contention. Besides, it is
possible to reduce the energy consumption, since the
nodes can sleep during time slots in which they are
not transmitting or receiving packets. Modes TSCH,
and DSME also employ multichannel communication
and three types of topology (star, mesh or tree), while
the LLDN define only star networks that use a sin-
gle channel to communicate. However, some works
have proposed the use of a tree topology and multiple
channels in LLDN networks (Patti et al., 2014; Patti
and Bello, 2016).
In the next sub-section more details about the
DSME mode are provided, since the protocols pro-
posed and evaluated in this paper are based on this
mode.
2.1 The Deterministic and Synchronous
Multi-channel Extension Mode
The DSME mode is the most complex and flexible
mode of the IEEE 802.15.4e standard (Guglielmo
et al., 2016). It extends the beacon-enabled mode
SENSORNETS 2017 - 6th International Conference on Sensor Networks
88

Figure 1: Example of a superframe structure for a DSME
network.
of the IEEE 802.15.4, which is based on a super-
frame structure, that is managed by the network coor-
dinator. The coordinator sends beacon frames to de-
limit two consecutive superframes. The main differ-
ences between the beacon-enabled mode of the IEEE
802.15.4 and the DMSE mode is that the DSME mode
allows the use of a higher number of Guarantee Time
Slots (GTS), and allows communication using multi-
ple channels during the contention free period. Thus,
multiple nodes can transmit simultaneously during
the same GTS in different channels, increasing the
overall WSN throughput.
Figure 1 shows an example of a superframe struc-
ture defined according to the DSME mode of the
IEEE 802.15.4e standard (802, 2012). Each super-
frame is composed by a Contention Access Period
(CAP), and a Contention Free Period (CFP). Different
from the beacon-enabled mode of the IEEE 802.15.4,
there is no inactive period. In the CAP, the nodes can
access the communication medium using CSMA/CA
or ALOHA (Guglielmo et al., 2016). The beacon
frames, referred in the standard as Enhanced Bea-
cons (EB), delimit the superframes. The EB frames
are transmitted using the same channel, defined in the
starting process of the network (802, 2012), which is
also used in the CAP period.
Multiple superframes can be grouped inside a
multi-superframe, and multiple multi-superframes
can be grouped inside the same Beacon Interval (BI).
This time structure is configured using some param-
eters, that is: macSuperframeOrder (SO), macMulti-
superframeOrder (MO), and macBeaconOrder (BO),
in which 0 ≤ SO ≤ MO ≤ BO ≤ 14. The parame-
ter SO defines the size of the superframes, MO de-
fines the size of the multi-superframes, and BO de-
fines the BI. In the example shown in Figure 1 the
parameters MO = SO + 1, and BO = MO + 1. Each
superframe has 16 time slots. Thus, the value of SO
defines the duration of each slot. Optionally, the num-
ber of CAP can be reduced in a multi-superframe,
through a mechanism called capReduction. When the
capReduction is enabled, only the first superframe in
Figure 2: Channel diversity mechanisms defined for DSME
networks.
the multi-superframe has the CAP.
In the DSME networks there are three types of
nodes: PAN coordinator, coordinator, and end node.
The PAN coordinator sends a EB every BI. The co-
ordinator is the sink node for some of the network
nodes. A coordinator sends a beacon at least once per
multi-superframe, in the beacon slot, in order to regis-
ter its presence in the network (Alderisi et al., 2015).
In Figure 1, Node 1 is the PAN coordinator, Node
2 is a coordinator, and the remaining are end nodes.
The coordinators can forward packets from end nodes
that do not reach the PAN coordinator directly. In
the same network multiple coordinators nodes are al-
lowed.
The DSME mode defines two types of channel di-
versity, that is: channel hopping, and channel adap-
tation. Figure 2 shows two examples of scheduling
for the CFP period, using channel hopping in (a), and
channel adaptation in (b). When using the channel
hopping, the nodes receive packets in different chan-
nels depending on the channel offset of the node, the
slot ID, the superframe ID, and the sequence num-
ber of the EB sent by the coordinator. For example,
in the example illustrated in Figure 2(a), Node 1 re-
ceives a packet using Channel 0 in the first time slot,
using Channel 1 in the second time slot, and so on.
The nodes that receive packets inside the same super-
frame need to have different channel offsets, in order
to avoid collisions.
When using channel adaptation, a fixed channel is
allocated for a given time slot inside the superframe,
and a given pair of nodes. For example, in the ex-
ample illustrated in Figure 2(b), Channel 0 was allo-
cated for the communication from node 2 to node 1,
in all slots. The channel is only changed if the allo-
cated channel starts to present bad quality. The stan-
dard does not define how to select the communication
channels when using channel adaptation (Guglielmo
et al., 2016). In this paper, an algorithm to estimate
the link quality is proposed, and used to implement
the channel adaptation mechanism.
Another interesting characteristic of the DMSE
is the possibility of using group acknowledgment
(GACK), in which two time slots of the multi-
Comparison between Channel Hopping and Channel Adaptation for Industrial Wireless Sensor Networks
89

superframe are allocated for the GACK frames (G1
and G2). The coordinator uses G1 to acknowledge
all packets received until the G1 time slot. The G2 is
used to acknowledge all packets received after the G1
time slot and before the G2 time slot. If the GACK
is not used, all packets transmitted to the coordinator
are acknowledged individually (802, 2012). With this
mechanism, a node can retransmit a lost packet inside
the same multi-superframe, if one slot before the G1
and other slot between G1 and G2 are allocated to the
node.
2.2 Related Research
Some authors have proposed mechanisms to im-
prove the performance of IEEE 802.15.4e networks,
through the use of dynamic channel allocation or dy-
namic configuration of the blacklist for TSCH net-
works. In (Grsu et al., 2016) an experiment was per-
formed to analyze the performance of a TSCH net-
work inside an aircraft cabin, with external interfer-
ence caused by Wi-Fi networks. In the experiments
described in (Grsu et al., 2016) the Packet Error Rate
(PER) was 35%, when using the 16 available chan-
nels, due to interference problems. In general, when
fewer channels were used, the performance was bet-
ter, as the interference is lower. For example, when
using only one channel, the less affected by the inter-
ference sources, the PER was 5%. However, a mecha-
nism is needed to estimate the quality of the channels
and to dynamically configure the blacklist.
In (Du and Roussos, 2011; Du and Roussos, 2013)
the use of adaptive frequency hopping for TSCH net-
works was proposed, in order to avoid using channels
affected by interference sources. In this approach,
two time slots in each cycle are used to perform read-
ings of RSSI values, in order to identify interference
sources. Based on these measurements, the black-
list is updated to avoid the channels with a high level
of interference. In (Du and Roussos, 2013) experi-
ments were conducted considering different sizes for
the blacklist. It was observed that the higher the size
of the blacklist, the better the communication perfor-
mance. This result corroborate the results presented
in (Grsu et al., 2016). However, this type of behav-
ior only occurs if an adequate monitoring of the qual-
ity of the channels is performed, in order to properly
configure the blacklist in real time. One limitation of
the approach presented in (Du and Roussos, 2011)(Du
and Roussos, 2013) is that only interference problems
are considered. Other aspects that can affect the qual-
ity of the links are not considered, such as shadowing
and fading. Besides, the channel quality monitoring
is performed by all nodes and using time slots that
could be used for communication, which incurs in a
high overhead, and in an increase of latency.
Some authors have proposed the use of techniques
for channel diversity and multi-channel communica-
tion based on the IEEE 802.15.4e standard for LLDN
networks, which use originally only one channel.
In (Patti et al., 2014) a multi-level and multichannel
protocol based on the LLDN mode, called the MC-
LLDN, was proposed. The goal is to increase the scal-
ability of the network through the use of a multi-level
topology, data aggregation, and multi-channel com-
munication. The drawback is that the channels are al-
located to the sub-networks in a static way. Thus, it is
not capable of dealing with the variations that occur in
the channel quality over time. The protocol described
in (Patti and Bello, 2016) is an evolution of the MC-
LLDN, called PriMuLa, which incorporates adaptive
channel selection. One limitation of the proposed pro-
tocol, which is due to the characteristics of the LLDN,
is that a same channel is allocated to all nodes in the
sub-network. However, spatial variations in the chan-
nel quality can occur, as well as asymmetry problems.
In the approaches developed for the present paper, the
channel quality is assessed in a per-link basis, as well
as the channel allocation.
The experiments described in (Jeong and Lee,
2012) and (Lee and Jeong, 2012) evaluated the per-
formance of the DSME mode in comparison to the
beacon-enabled mode of the IEEE 802.15.4. The
experiments verified that, in some scenarios, the
throughput of the IEEE 802.15.4e DSME network can
be 12 times higher than the IEEE 802.15.4 beacon-
enabled network, and with a lower energy consump-
tion, due to the use of a TDMA-based medium ac-
cess. In the experiments frequency hopping was used,
and no dynamic management of the blacklist was em-
ployed. In (Lee and Jeong, 2012) the influence of in-
terference caused by Wi-Fi networks was evaluated,
but other problems that can affect the channel qual-
ity in industrial environments, such as shadowing and
fading, were not considered.
In (Capone et al., 2014) simulation studies to
verify the performance of DSME networks are de-
scribed, and some enhancements to optimize the en-
ergy consumption are proposed. However, the paper
focuses mainly on energy consumption, and did not
consider in the experiments the problems that can af-
fect the channel quality, such as interference and fad-
ing. Besides, although in the simulations described
in (Capone et al., 2014) the channel adaptation mech-
anism was considered, the details about the imple-
mentation of this mechanism are not provided.
In (Alderisi et al., 2015) a comparison between
DSME and TSCH in process automation scenarios is
described. Simulations were performed to verify the
SENSORNETS 2017 - 6th International Conference on Sensor Networks
90

delay, reliability, and scalability of each mode. The
TSCH presented better results for small networks,
with up to 30 nodes. For larger networks, with more
than 30 nodes, the DSME presented better results.
The simulations described in (Alderisi et al., 2015)
used realistic parameters for the log-normal shadow-
ing, but the effect of fading and the non-stationary
characteristics of the wireless channel were not con-
sidered. In addition, only the channel hopping mech-
anism of the DSME were analyzed. The simulation
model used for the present paper considers more as-
pects that can affect the channel quality, that is: shad-
owing, fading, asymmetry, and the non-stationary
characteristics of the channel in long time periods.
Besides, a comparison between channel hopping and
channel adaptation is performed.
In (Juc et al., 2016) a comparison between TSCH
and DSME is described, in terms of energy consump-
tion and performance. In the scenarios under consid-
eration, the energy consumption of DSME was slight
better than TSCH, as well as the performance. For ap-
plications that send less data, the TSCH under-utilize
the bandwidth, due to the fixed size of the time slots.
In the experiments described in (Juc et al., 2016) only
channel hopping was considered, and without group
ACK. In the present paper, channel adaptation are also
considered, as well as group ACK.
3 PROPOSED DSME-BASED
PROTOCOLS
In this paper, three approaches for the DSME mode
are implemented and evaluated, called CH-DSME,
CA-DSME, and H-DSME. The CH-DSME is based
on the channel hopping mechanism, and without
blacklist. Most papers, described in Section 2.2, eval-
uated the DSME with this type of channel diversity.
In (Capone et al., 2014) the channel adaptation mech-
anism was considered, but the details about the imple-
mentation of this mechanism were not provided. The
CA-DSME is based on the channel adaptation mech-
anism for the CFP periods of the superframes. An
algorithm to estimate the quality of the links is used
to decide when a channel switch is needed. The H-
DSME is a hybrid approach that uses channel adapta-
tion in the CFP periods, and channel hopping for the
beacons, and GACK frames.
This paper focuses in channel diversity tech-
niques. Thus, to simplify the analysis at this point, a
star topology was considered. In future works, the ex-
tension of the proposed approaches for tree and mesh
networks, and considering a larger number of nodes,
will be studied.
3.1 CH-DSME
Figure 3 shows the frame structure implemented for
the CH-DSME. A network with 10 nodes, and star
topology was considered, in which nine end nodes
(Node 1 to Node 9) are connected, and transmit pack-
ets directly to the PAN coordinator (Node 0), and only
one transmission occurs in each time slot. In Figure 3
the numbers in the time slots indicate the ID of the
end node that performs a transmission in each time
slot. The capReduction was enabled, and thus only
the first superframe has the CAP.
Each node has two time slots to transmit pack-
ets. The first one is before the first GACK (G1), and
the second one is placed between G1 and the second
GACK (G2). Thus, if the transmission in the first at-
tempt fails, the end node can try again, using other
channel, inside the same multi-superframe. The sec-
ond time slot of each node is used only for retrans-
mission. If the first transmission occurs successfully,
the second time slot is not used. The beacons, and
GACK frames are always transmitted using the same
channel (Channel 0 in Figure 3). For transmission of
data packets, the channel to be used in a given time
slot i is determined using
c(i) = (i + j × l + macChannelO f f set + BSN)%16,
where j is the superframe index, macChannelOffset
is the channel offset of a receiver node, BSN is a se-
quence number of the beacon sent by the PAN coor-
dinator. The value of l is equal to 15 if CAP reduction
is enabled and j is not equal to zero, or 7 otherwise.
In the implementation built for this paper, the mac-
ChannelOffset is equal to the ID of the receiver node.
All the 16 channels were considered, thus the value of
c(i) is an integer between 0 and 15, which represents
the channel identification.
3.2 CA-DSME
The CA-DSME also uses the frame structure shown in
Figure 3, but with a different channel diversity mech-
anism. In CA-DSME all nodes transmit to the coor-
dinator using only one channel, without channel hop-
ping. All the nodes use the same channel at the be-
ginning. Since only one transmission occurs in each
time slot, the end nodes can use the same channel in
the transmissions. In scenarios with more than one
transmission at the same time, the channels need to
be allocated in order to avoid collisions. A channel
switch only occurs when the channel of a given link
starts to present bad quality, and only the channel of
the affected link is changed.
When using channel adaptation in the CFP peri-
ods, it is possible to pick good channels for all links, if
Comparison between Channel Hopping and Channel Adaptation for Industrial Wireless Sensor Networks
91
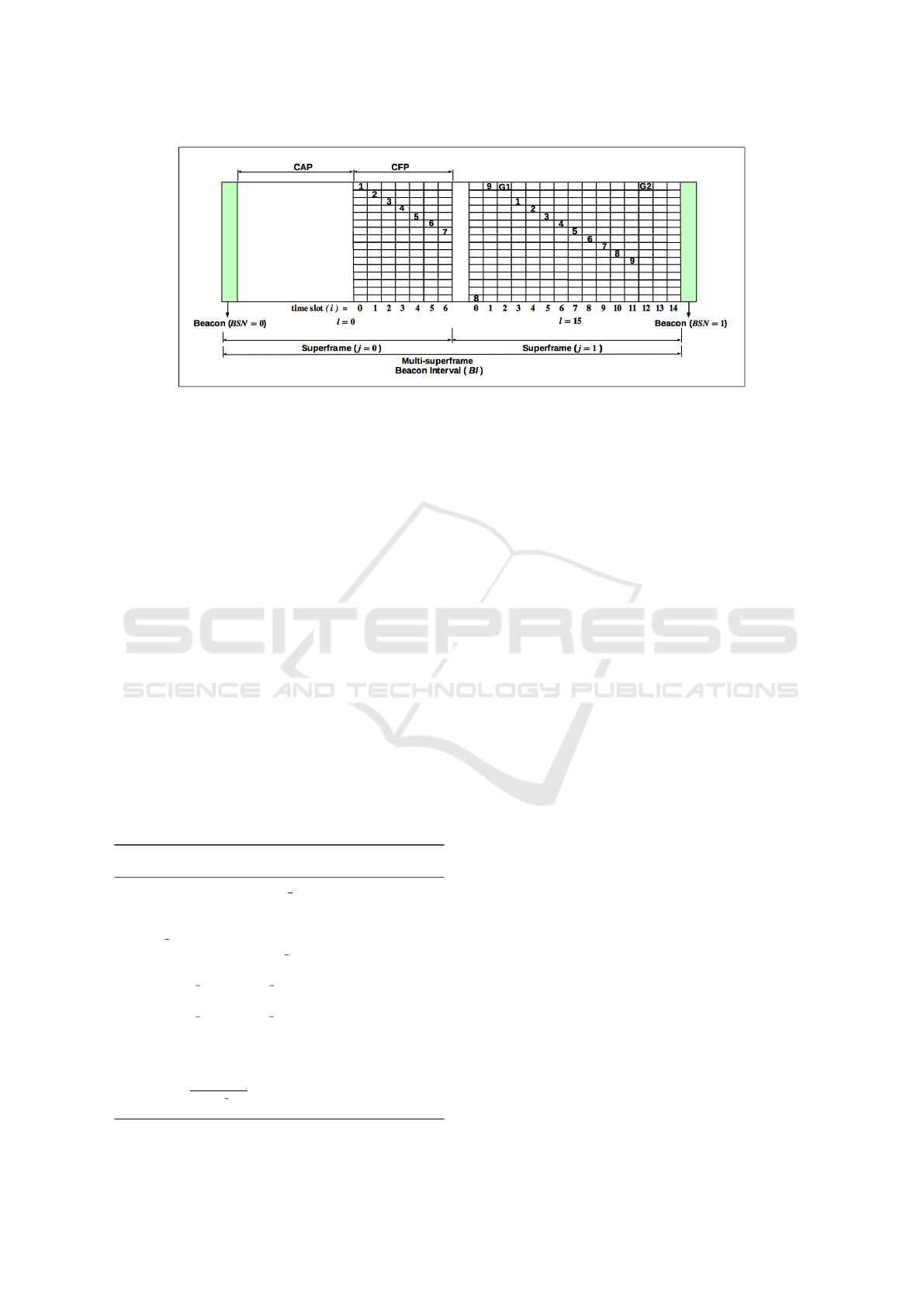
Figure 3: The time structure used in the simulations.
the link quality estimator is able to quickly and accu-
rately estimate the link quality. The experiments de-
scribed in (Du and Roussos, 2013; Grsu et al., 2016)
showed that by using only one channel, the network
performance is higher than using a channel hopping
mechanism with a larger set of channels. However,
the channels to be used need to be properly chosen.
Since the nodes try to retransmit a lost packet only
once, and inside the same multi-superframe, it is pos-
sible to calculate the Packet Reception Rate (PRR),
using the information obtained from a set of received
packets. The Algorithm 1 was used to calculate the
Packet Reception Rate of each link, in which each
packet has an ID (a sequence number that identifies
the packet) and the information about in which slot it
was received, that is, before G1 (slot 1) or after G1
(slot 2). If the same packet is received twice due to
a fail in the reception of G1, only the first received
packet is put on the packet list to be analyzed by the
algorithm. This algorithm also considers that the sec-
ond time slot is used only for retransmission.
Using the Algorithm 1 the coordinator calculates
the PRR for each link using a window of N packets. A
Algorithm 1: Algorithm to calculate the Packet Reception
Rate.
Input: a list of packets packet list with N packets, and the
expected id for the first packet in the list f p
id
Output: the Packet Reception Rate (PRR)
1: f ail cont := 0
2: for each packet in packet list do
3: if packet.slot = 1 then
4: f ail cont := f ail cont + 2 · (packet.id − f p
id
)
5: else
6: f ail cont := f ail cont + 2 · (packet.id − f p
id
) +
1
7: end if
8: f p
id
:= packet.id + 1
9: end for
10: PRR :=
N
N+ f ail cont
11: return PRR
threshold can be defined for each link, in order to trig-
ger the channel switch procedure. In the implementa-
tion built for this paper, N = 10, and a threshold equal
to 0.9, for all nodes, were used. Each new PRR value
obtained using the Algorithm 1 is combined with the
last calculated value using an Exponentially Weighted
Moving Average (EWMA) filter with history control
factor α = 0.3, to make the calculated PRR more sta-
ble over time. Higher values for α can make the esti-
mator more stable, but the reactivity becomes smaller.
In the beacon frame, there is a bitmap to indicate
to each node if it needs to perform a channel switch.
When the PRR calculated for a given link is below its
threshold, the coordinator sets the corresponding bit
on the bitmap to 1. When the node receives a beacon
indicating the need of a channel switch, it switches
to the next channel, in a round-robin fashion. While
the coordinator does not receive a packet in the new
channel, it continues to send the beacon with the bit
equal to 1 in the bitmap. After receiving the first
packet in the new channel, the coordinator clears the
bit. Since the beacon frames are always sent using the
same channel, if the transmission of a beacon fails, the
nodes can wait for the next beacon to re-synchronize.
A mechanism to identify deep fading problems
was also implemented. As the coordinator needs to
receive data packets to calculate the PRR using the
Algorithm 1, when the link between a given end node
and the coordinator enters in a deep fading state, no
packets can be received while the channel remains in
that state. Thus, when the coordinator does not re-
ceive packets from a given end node during a long
period, it starts the channel switch procedure for that
node. In the implementation built for this paper, the
coordinator starts a channel switch procedure when
no packet is received from a given end node during
10 consecutive BI.
In both CH-DSME and CA-DSME the channel
used to transmit the beacons and the GACK frames
SENSORNETS 2017 - 6th International Conference on Sensor Networks
92

is a single point of failure. In these protocols, it is
possible to deal with problems that affect the qual-
ity of a subset of channels through channel hopping
or channel adaptation, but they are not capable of
dealing with problems that affect the channel used to
transmit the beacons and the GACK frames. Thus,
in this paper a new hybrid approach is proposed (the
H-DSME), which is better explained in Section 3.3.
3.3 H-DSME
The beacon and GACK frames are transmitted in
broadcast mode to all the end nodes connected to the
coordinator. Therefore, the channel used to trans-
mit these frames needs to present good quality for
all links between the coordinator and the end nodes.
However, spatial variations in the channel quality can
occur. The coherence length is used to quantify the
maximum change in distance that will result in the
channel being highly correlated. In experiments de-
scribed in (Watteyne et al., 2010), it was verified a
coherence length of 5.5 cm for IEEE 802.15.4 radios
operating in the 2.4 GHz band. Thus, two nodes po-
sitioned more than 5.5 cm apart from each other, and
using the same channel, can be considered uncorre-
lated, and thus the channel can present high quality
for one node, and low quality for the other.
Although the use of only one channel during a
large time period can be advantageous for the CFP
periods, as explained in Section 3.2, it may be dif-
ficult to guarantee a good qualify of service for all
end nodes when using only one channel for the trans-
mission of beacons and GACK frames. Thus, the
H-DSME uses channel adaptation for the CFP peri-
ods (in the same way of CA-DSME), and channel
hopping for the transmission of beacons and GACK
frames. The channels are used in a round-robin fash-
ion to transmit the beacons and GACK frames. Using
this mechanism, the end nodes do not remain discon-
nected for a large time period, when one channel be-
gins to decrease its quality regarding the coordinator
link.
The IEEE 802.15.4e standard defines that the
channel used in the set-up of the network needs to be
used to transmit the beacons and for the transmissions
in the CAP period (802, 2012). However, the modi-
fication to use multiple channels can be done with no
interference with the other parts of the protocol.
When dynamic addition of nodes is considered,
the nodes that want to join the network need to listen
in some channel during up to 16 BI. If no beacon is re-
ceived, the node can start to listen in another channel
during other 16 BI. When only one channel is used to
transmit the beacon frames, as defined originally by
the standard, the node listens in one channel during
only one BI. However, if the end node doesn’t know
the channel used to transmit the beacons a priori, in
some cases it will be necessary to wait for multiple
BI (16 in the worst case) until a beacon is received. In
addition, if the channel in use to transmit the beacons
presents a very low quality for the link between the
coordinator and the new node, the delay to join the
network can be very high. This aspect will be better
evaluated in future works.
To accommodate the use of channel hopping in the
transmission of the beacons, it is necessary to have a
mechanism to maintain the network synchronized in
case of failures during the reception of a beacon. To
do this, a timer is used in the end nodes to identify
that a beacon has been lost. The coordinator sends a
new beacon for each BI, thus the timer is configured
to expire after a time equal to BI +
SD
16
ms, where
SD
16
is the duration of a time slot. The values of BI and
SD depend on the values of the parameters BO and
SO, respectively. If a node receives a new beacon be-
fore the timer expires, the timer is reseted. Otherwise,
the node switches the channel, and waits for the next
beacon, which maintains the synchronization.
4 EVALUATION
METHODOLOGY
The wireless channel can be considered as stationary
for a short term, despite the moving parts around the
transmitter and the receiver. However, the properties
of the channel can change significantly over time due
to changes in the topology of the environment, which
are not considered in the distributions used to model
the fading. This may require the recalculation of the
distribution parameters, since these parameters may
become obsolete over time (Agrawal et al., 2014b).
A characterization of the wireless channel in in-
dustrial environments was performed for a long term
(20 hours) in (Agrawal et al., 2014a). The experiment
demonstrated that abrupt changes in the channel char-
acteristics can occur when the channel is analyzed for
a long time, and differences on the mean value of the
received power are observed, although the transmit-
ter and receiver remain static. For example, in the
experiment described in (Agrawal et al., 2014a), the
received power varied about -55 dBm during seven
hours, and after this period the mean value of the re-
ceived power changed abruptly to -46 dBm. An ex-
periment described in (Olofsson et al., 2016) also pre-
sented similar behavior, showing the special nature of
these environments.
To allow the simulation of protocols for industrial
Comparison between Channel Hopping and Channel Adaptation for Industrial Wireless Sensor Networks
93
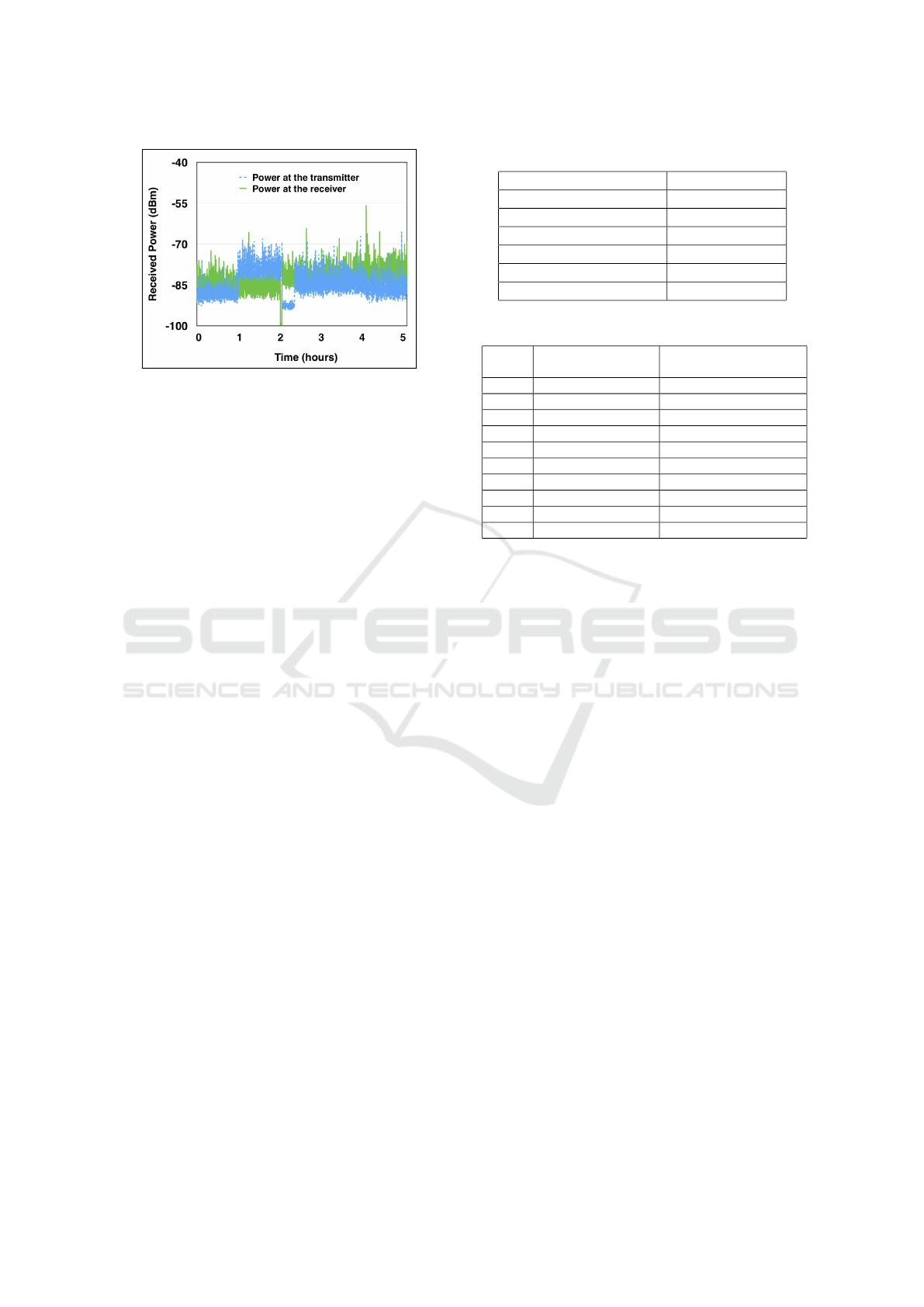
Figure 4: Asymmetry and temporal variations in the re-
ceived power.
WSN, it is necessary to use a model that takes into
account the channel characteristics for a long period
of time. In a previous article (Gomes et al., 2015b),
a simulation model was developed, which includes
the effects of fading, log-normal shadowing, and the
non-stationary characteristics of the channel. In this
model, different channels can present different char-
acteristics, since the channels defined by the physi-
cal layer of the IEEE 802.15.4e are uncorrelated in
frequency. Experiments described in (Amzucu et al.,
2014) have demonstrated that changing the communi-
cation channel can lead to a difference of up to 30 dB
in the received power, in an office environment. Ex-
periments described in (Watteyne et al., 2010), in an
office environment, showed that for distances greater
than 6.5 m between transmitter and receiver, even the
adjacent channels are uncorrelated.
In the current implementation, two instances of
the model are used to model the wireless channel in
the two directions of a link, to capture the asymme-
try. In the model, abrupt changes in the channels
characteristics can occur. A mean time of change is
defined for the model, which is used to define the
value of a parameter p, the probability that a change
in the characteristics of the channels occur. Thus, it
is possible to simulate environments that remain un-
changed for a long period of time and environments
that present frequent changes in the topology. The
simulation result obtained using the model is compat-
ible with results from experiments performed in in-
dustrial environments (Agrawal et al., 2014b) (Gomes
et al., 2015a) (Olofsson et al., 2016).
Figure 4 shows the reception power at a receiver
(obtained from received packets) and a transmitter
(obtained from received ACKs) during five hours of
simulation to test the model. It is possible to notice
the abrupt changes that occur in the channel charac-
teristics over time, and the asymmetry between the
two directions of the link.
Table 1: Parameters used in the simulation.
Area 60 x 60 meters
Physical layer IEEE 802.15.4
Bit rate 250 kbit/s
Simulation Time 7200 s (2 hours)
Transmission power 0 dBm
Packet transmission rate 1 packet/s
Mean time of change 40 minutes
Table 2: Position of the nodes in the simulations.
Node
ID
Coordinates
(X, Y, Z)
Distance to the
coordinator (node 0)
0 (-8.13, 7.66, 2) -
1 (-14.53, 2.66, 2) 8.12 meters
2 (-22.83, 8.91, 2) 14.75 meters
3 (-12.25, -19.79, 2) 27.76 meters
4 (16.66, -11.84, 2) 31.54 meters
5 (-12.46, -15.26, 2) 23.33 meters
6 (-1.93, 1.65, 2) 8.63 meters
7 (-13.60, -20.99, 2) 29.17 meters
8 (22.60, -5.45, 2) 33.41 meters
9 (-15.30, 9.73, 2) 7.46 meters
To evaluate the performance of the three ap-
proaches, five replications of the experiment were
made. Table 1 shows the parameters considered in the
simulations for each replication. For the lognormal
shadowing model the values of n = 1.69, d
0
= 15 m,
L(d
0
) = 80.48 dB, and X
σ
= 6.62 dB were used.
These values were obtained from experiments in an
industrial environment described in (Tanghe et al.,
2008). The mean time of change defines the average
time between two changes in the characteristics of the
channel.
To perform a fair comparison, for each replication
the same seed was used to evaluate each approach,
and different seeds were used for different replica-
tions. Thus, the three approaches were evaluated con-
sidering the nodes positioned at the same position and
with the same channel characteristics during the repli-
cations. The positions of the nodes are shown in Ta-
ble 2.
The frame structure used in the simulations is
shown in Figure 3. Table 3 shows the values of the pa-
rameters that were used to configure the frame struc-
ture. In this configuration, the SO is equal to the BO,
thus each BI has only one multi-superframe. Each
multi-superframe has two superframes, in which only
the first one has the CAP. With this configuration, the
beacon interval has approximately 0.246 s, which is
enough to accommodate the application implemented
for the simulations, that transmits one packet per sec-
ond.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
94
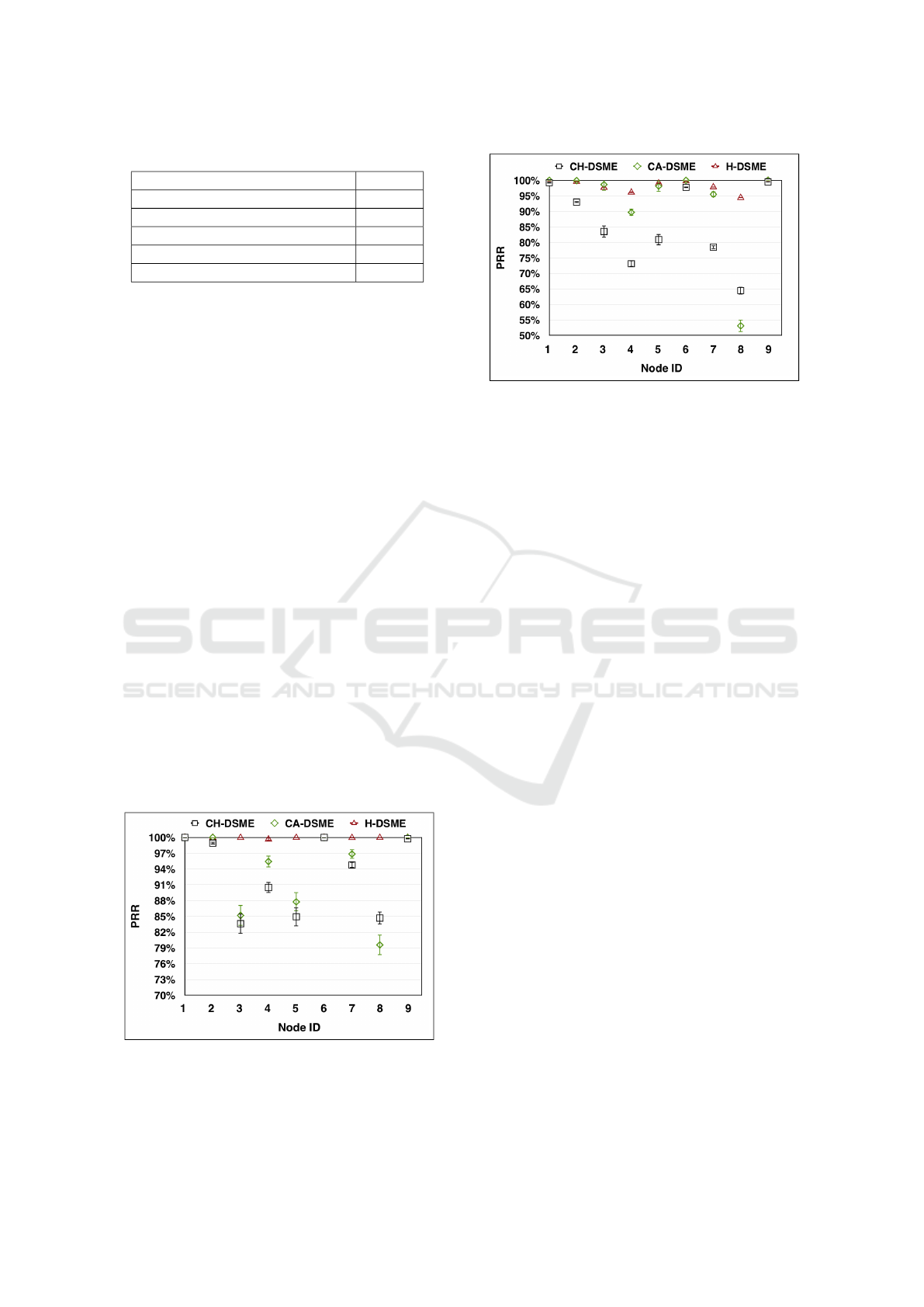
Table 3: Parameters of the frame structure.
macBeaconOrder (BO) 4
macMultisuperframeOrder (MO) 4
macSuperframeOrder (SO) 3
Time slot duration 7.68 ms
capReduction enabled
Group Ack enabled
5 RESULTS
Four metrics were used to evaluate the approaches,
that is: the Packet Reception Rate (PRR) at the ap-
plication layer, the PRR at the MAC layer, the de-
lay, and the maximum time between the reception of
two consecutive packets. The PRR at the application
layer considers the relation between the packets re-
ceived and transmitted without considering the num-
ber of retransmissions at the MAC layer, while the
PRR at the MAC layer considers the retransmissions.
The delay is the time between the transmission of a
packet and the reception of the packet at the applica-
tion layer. The maximum time between the reception
of two packets was analyzed to investigate the time
in which the nodes remain disconnected due to low
channel quality.
Figure 5 shows the PRR at the application layer
for the nine end nodes. The averages and confidence
intervals were calculated considering the data ob-
tained from all replications. For the nodes positioned
further apart from the sink node, the PRR was smaller
when using CH-DSME and CA-DSME. When using
the H-DSME the PRR at the application layer was al-
most 100% for all nodes. When using CH-DSME and
CA-DSME, most errors occurred due to failures in the
transmission of the beacons.
Figure 5: PRR at the application layer.
In general, the performance of the CA-DSME was
better than the CH-DSME, except for the End Node 8.
This shows that in most cases the use of only one
Figure 6: PRR at the MAC layer.
channel during a larger time period provides a bet-
ter quality than the use of all available channels with
channel hopping. However, in scenarios in which the
quality of the link between the coordinator and the
end node for beacon transmissions is very low, the
channel adaptation mechanism implemented for this
research can delay a long time to perform the chan-
nel switch. This was the case of the End Node 8.
When using H-DSME the channel adaptation mech-
anism was more reactive, since multiple channels are
used to transmit the beacons, which eliminates the
single point of failure.
Figure 6 shows the PRR at the MAC layer. A
transmission of a data packet in the MAC layer only
occurs when a beacon is received at the end node.
Thus, the failures in the beacon transmissions do not
influence the PRR calculated at this layer, since only
the transmissions of data packets from the end nodes
to the coordinator are considered. It is worthy to note
that when using CH-DSME the PRR at the MAC layer
is significantly lower.
Since in the evaluated protocols two attempts are
possible per packet, and in the CH-DSME different
channels are used in each attempt, in most cases the
packet is delivered at the application layer. How-
ever, when more retransmissions are needed the en-
ergy consumption of the end nodes can increase sig-
nificantly. Again, the End Node 8 was the only ex-
ception, and the PRR was lower for the CA-DSME
than for the CH-DSME for this end node. Even both
CA-DSME and H-DSME use channel adaptation, the
PRR at the MAC layer for the H-DSME was higher,
since the channel adaptation mechanism was more re-
active when using channel hopping for the beacons, as
observed also in Figure 5.
Figure 7 shows the cumulative distribution func-
tion of the delay. Since the beacon period is approxi-
mately 0.25 seconds, 93% of the packets were trans-
mitted with a delay lower than 0.25 seconds, and 99%
of the packets were transmitted with delay lower than
Comparison between Channel Hopping and Channel Adaptation for Industrial Wireless Sensor Networks
95
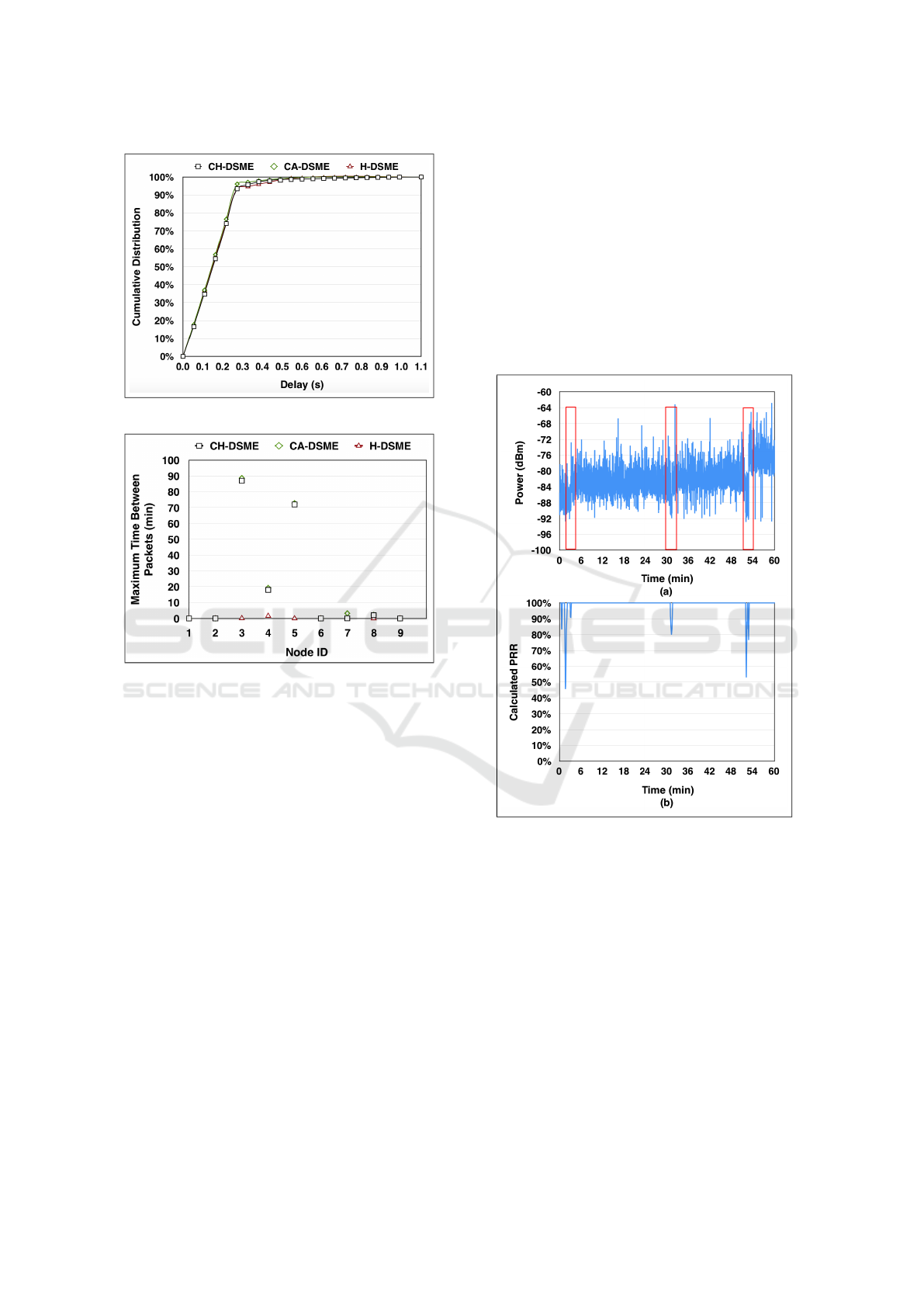
Figure 7: Delay at the application layer.
Figure 8: Maximum time between the reception of two con-
secutive packets.
0.5 seconds, which corresponds to two beacon inter-
vals. Since the three evaluated approaches use the
same superframe structure, the delay distribution was
very similar. However, the delay is only computed for
the delivered packets, and does not account for lost
packets.
Figure 8 shows the maximum time lapse between
the reception of two packets, which represents the
maximum time interval in which a node remains dis-
connected. Since CA-DSME, and CH-DSME use
only one channel for beacon transmissions, some-
times this channel can present low quality, for some
nodes, during a long time period, due to a deep fad-
ing. The same channel can present good quality for
other nodes, due to the spatial variation in the channel
quality.
When using CH-DSME and CA-DSME, End
Nodes 3, 4, and 5 presented long disconnection times
(88, 29, and 72 minutes) due to problems in the chan-
nel used to transmit the beacon frames. Since the H-
DSME uses channel hopping to transmit the beacons,
this protocol is more robust against deep fading prob-
lems that affects only some channels. Besides, it is
possible to deal with the spatial variation in the qual-
ity of the channels. For the H-DSME the maximum
time of disconnection was 1.6 minutes, for the End
Node 4.
As an example of the implemented channel adap-
tation mechanism, Figure 9 shows the reception
power for End Node 8 in the first hour of simulation of
the first replication, when using the H-DSME. In the
charts, some moments in which the channel switch
procedure is triggered are highlighted. It is possible
to notice the difference in the characteristics of the
different channels when the channel switch occurs.
Figure 9: Received power at the End Node 8 in (a) and the
calculated PRR using the Algorithm 1 (b), using H-DSME.
Sometimes, the channel switch procedure is trig-
gered several times in a short time interval, until the
node picks a good channel. For example, between
1.38 and 3.13 minutes, the End Node 8 switched its
channel five times. However, when the End Node
picks a good channel, it can remain for a long time
using the same channel. In some cases, as demon-
strated in the experiments described in (Agrawal
et al., 2014a), the channels can maintain the same
characteristics during several hours before an abrupt
change in its characteristics occurs. In the simulations
a threshold of 0.9 was defined. If the application sup-
ports lower thresholds, the channel switch procedure
is triggered less often.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
96

6 CONCLUSIONS
This paper presented a comparison between chan-
nel hopping and channel adaptation for industrial
WSN. Three protocols, based on the DSME mode of
the IEEE 802.15.4e standard, were implemented and
evaluated using a realistic simulation model. This
model permitted to observe the performance of the
protocols, considering the non-stationary behavior of
the wireless channel in industrial environments.
A novel hybrid approach (H-DSME), that uses
channel hopping for the transmission of beacons and
ACK frames, and channel adaptation for the trans-
mission of data packets, was proposed. The results
showed that the use of channel adaptation is better
than channel hopping, when the quality of the links is
monitored continuously by the network coordinator.
Since the beacon frames and ACK frames are
transmitted in broadcast mode to several nodes, it is
difficult to guarantee that a single channel will present
good enough quality for all nodes. Thus, the use of
channel hopping to transmit the frames is a good al-
ternative to deal with the channel spatial variation in
quality.
The H-DSME outperformed the other two ap-
proaches. In the performed simulations, even for
nodes that were positioned further apart from the co-
ordinator, and even considering the variations in chan-
nel quality over time, the PRR at the application layer
was almost 100% when using the H-DSME, and the
number of retransmissions was also reduced. Be-
sides, 99% of the packets were delivered with a delay
smaller than 0.5 s, which corresponds to two beacon
intervals, and the maximum time of disconnection of
the nodes was only 1.6 minutes.
This paper describes an analysis of the use of
channel adaptation to implement industrial WSN
based on the DSME mode. However, the algorithm
used to estimate the channel quality considers that all
the operation of the transmitter is predictable, that is,
only one retransmission is allowed, and there is a slot
dedicated to transmissions, and other slot dedicated
only for retransmissions.
A more flexible use of the time slots, for exam-
ple, the use of two transmissions of different packets
in the same multi-superframe, and the use of a vari-
able number of retransmission attempts, can lead the
algorithm to present a low accuracy, unless more in-
formation obtained at the end nodes are provided to
the coordinator, such as the average number of trans-
mission attempts per packet.
Other aspect to be considered is the overhead
caused by the algorithm. Experimental studies will
be performed to investigate if the continuous monitor-
ing of the quality of the links is viable using low-cost
sensor nodes. The use of dedicated nodes to moni-
tor channel quality, as proposed initially in (Gomes
et al., 2014), as well as the use of estimators based on
physical layer metrics, will be studied. Experiments
considering different network topologies will also be
performed.
ACKNOWLEDGEMENTS
The authors would like to thank the support of the
COPELE-UFCG, the Institute for Advanced Studies
in Communications (Iecom), the Brazilian Council
for Research and Development (CNPq), the Coordi-
nation for the Improvement of Higher Education Per-
sonnel (Capes), and the SMART 2 Project of the Eras-
mus Mundus Programme.
REFERENCES
(2012). Ieee standard for local and metropolitan area
networks–part 15.4: Low-rate wireless personal area
networks (lr-wpans) amendment 1: Mac sublayer.
IEEE Std 802.15.4e-2012 (Amendment to IEEE Std
802.15.4-2011), pages 1–225.
Agrawal, P., Ahlen, A., Olofsson, T., and Gidlund, M.
(2014a). Characterization of long term channel varia-
tions in industrial wireless sensor networks. In IEEE
International Conference on Communications, pages
1–6.
Agrawal, P., Ahl
´
en, A., Olofsson, T., and Gidlund, M.
(2014b). Long term channel characterization for en-
ergy efficient transmission in industrial environments.
IEEE Trans. on Communications, 62(8):3004–3014.
Alderisi, G., Patti, G., Mirabella, O., and Bello, L. L.
(2015). Simulative assessments of the ieee 802.15.4e
dsme and tsch in realistic process automation scenar-
ios. In 2015 IEEE 13th International Conference on
Industrial Informatics (INDIN), pages 948–955.
Amzucu, D. M., Li, H., and Fledderus, E. (2014). Indoor
radio propagation and interference in 2.4 ghz wireless
sensor networks: Measurements and analysis. Wire-
less Personal Communications, 76:245–269.
Anastasi, G., Conti, M., Francesco, M. D., and Passarella,
A. (2009). Energy conservation in wireless sensor net-
works: A survey. Ad Hoc Networks, 7(3):537 – 568.
Capone, S., Brama, R., Ricciato, F., Boggia, G., and Mal-
vasi, A. (2014). Modeling and simulation of energy
efficient enhancements for ieee 802.15.4e dsme. In
2014 Wireless Telecommunications Symposium, pages
1–6.
Du, P. and Roussos, G. (2011). Adaptive channel hopping
for wireless sensor networks. In Mobile and Wireless
Networking (iCOST), 2011 International Conference
on Selected Topics in, pages 19–23.
Comparison between Channel Hopping and Channel Adaptation for Industrial Wireless Sensor Networks
97

Du, P. and Roussos, G. (2013). Spectrum-aware wireless
sensor networks. In 2013 IEEE 24th Annual Inter-
national Symposium on Personal, Indoor, and Mobile
Radio Communications (PIMRC), pages 2321–2325.
Gnawali, O., Fonseca, R., Jamieson, K., Moss, D., and
Levis, P. (2009). Collection tree protocol. In Pro-
ceedings of the 7th ACM Conference on Embedded
Networked Sensor Systems, SenSys ’09, pages 1–14,
New York, NY, USA. ACM.
Gomes, R. D., Alencar, M. S., Queiroz, D. V., and Fon-
seca, I. E. (2016). Evaluation of link quality estima-
tors for industrial wireless sensor networks. In XXXIV
Simp
´
osio Brasileiro de Telecomunicac¸
˜
oes e Processa-
mento de Sinais, pages 1–5.
Gomes, R. D., Fonseca, I. E., and Alencar, M. S. (2015a).
Protocolos multicanais para redes de sensores sem fio
industriais (in portuguese). Revista de Tecnologia da
Informac¸
˜
ao e Comunicac¸
˜
ao, 5(2):25–32.
Gomes, R. D., Queiroz, D. V., Fonseca, I. E., and Alen-
car, M. S. (2015b). Modelo para simulac¸
˜
ao realista de
redes de sensores sem fio industriais (in portuguese).
In XXXIII Simp
´
osio Brasileiro de Telecomunicac¸
˜
oes,
pages 1–5.
Gomes, R. D., Rocha, G. B., Filho, A. C., Fonseca, I. E.,
and Alencar, M. S. (2014). Distributed approach for
channel quality estimation using dedicated nodes in
industrial wsn. In Personal, Indoor, and Mobile Ra-
dio Communication (PIMRC), 2014 IEEE 25th An-
nual International Symposium on, pages 1943–1948.
Guglielmo, D. D., Brienza, S., and Anastasi, G. (2016).
{IEEE} 802.15.4e: A survey. Computer Communi-
cations, 88:1 – 24.
Grsu, M., Vilgelm, M., Zoppi, S., and Kellerer, W. (2016).
Reliable co-existence of 802.15.4e tsch-based wsn
and wi-fi in an aircraft cabin. In 2016 IEEE Inter-
national Conference on Communications Workshops
(ICC), pages 663–668.
Jeong, W.-C. and Lee, J. (2012). Performance evaluation
of ieee 802.15.4e dsme mac protocol for wireless sen-
sor networks. In Enabling Technologies for Smart-
phone and Internet of Things (ETSIoT), 2012 First
IEEE Workshop on, pages 7–12.
Juc, I., Alphand, O., Guizzetti, R., Favre, M., and Duda,
A. (2016). Energy consumption and performance of
ieee 802.15.4e tsch and dsme. In 2016 IEEE Wireless
Communications and Networking Conference, pages
1–7.
Lee, J. and Jeong, W. C. (2012). Performance analysis of
ieee 802.15.4e dsme mac protocol under wlan interfer-
ence. In 2012 International Conference on ICT Con-
vergence (ICTC), pages 741–746.
Lima-Filho, A., Gomes, R., Adissi, M., Borges da Silva,
T., Belo, F., and Spohn, M. (2012). Embedded sys-
tem integrated into a wireless sensor network for on-
line dynamic torque and efficiency monitoring in in-
duction motors. IEEE/ASME Trans. on Mechatronics,
17(3):404–414.
Olofsson, T., Ahln, A., and Gidlund, M. (2016). Model-
ing of the fading statistics of wireless sensor network
channels in industrial environments. IEEE Trans. on
Signal Processing, 64(12):3021–3034.
Patti, G., Alderisi, G., and Bello, L. L. (2014). Introduc-
ing multi-level communication in the ieee 802.15.4e
protocol: The multichannel-lldn. In Proceedings of
the 2014 IEEE Emerging Technology and Factory Au-
tomation (ETFA), pages 1–8.
Patti, G. and Bello, L. L. (2016). A priority-aware multi-
channel adaptive framework for the ieee 802.15.4e-
lldn. IEEE Transactions on Industrial Electronics,
PP(99):1–1.
Petersen, S. and Carlsen, S. (2009). Performance evalua-
tion of wirelesshart for factory automation. In IEEE
Conference on Emerging Technologies & Factory Au-
tomation, pages 1–9.
Tanghe, E., Joseph, W., Verloock, L., Martens, L., Capoen,
H., Herwegen, K. V., and Vantomme, W. (2008). The
industrial indoor channel: Large-scale and temporal
fading at 900, 2400, and 5200 mhz. IEEE Trans. on
Wireless Communications, 7:2740–2751.
Watteyne, T., Lanzisera, S., Mehta, A., and Pister, K. S. J.
(2010). Mitigating multipath fading through channel
hopping in wireless sensor networks. In 2010 IEEE
International Conference on Communications, pages
1–5.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
98
