
A Comparison between Asynchronous Backtracking Pseudocode
and its JADEL Implementation
Federico Bergenti
1
, Eleonora Iotti
2
, Stefania Monica
1
and Agostino Poggi
2
1
Dipartimento di Matematica e Informatica, Universit
`
a degli Studi di Parma, Parma, Italy
2
Dipartimento di Ingegneria dell’Informazione, Universit
`
a degli Studi di Parma, Parma, Italy
Keywords:
Asynchronous Backtracking, JADEL, Distributed Constraint Satisfaction Problems.
Abstract:
In this paper, a comparison between the pseudocode of a well-known algorithm for solving distributed con-
straint satisfaction problems and the implementation of such an algorithm in JADEL is given. First, background
and motivations behind JADEL development are illustrated. Then, we make a description of the problem and
a brief introduction to JADEL. The core of this work consists in the translation of the algorithm pseudocode
in JADEL code, which is described in details. Scope of the paper is to evaluate such a translation, in terms of
closeness to pseudocode, complexity, amount of code written and performance.
1 INTRODUCTION
JADEL (JADE Language) is an agent-oriented
domain-specific language based on JADE (Java
Agent DEvelopment framework, jade.tilab.com).
JADE (Bellifemine et al., 2005) is a software frame-
work for implementing agents and multi-agent sys-
tems, which are compliant with FIPA specifica-
tions (Foundation for Intelligent Physical Agents,
2002). It consists of a middleware and it offers sev-
eral APIs and graphical tools that support multi-agent
systems development. JADE can be considered a con-
solidated tool, and it has been used for many rel-
evant applications, e.g., (Poggi and Bergenti, 2010;
Bergenti et al., 2011; Bergenti et al., 2013a; Bergenti
et al., 2014). As notable example, JADE has been in
daily use for service provision and management in
Telecom Italia for more than 6 years, serving mil-
lions of customers in one of the largest broadband
networks in Europe (Bergenti et al., 2015a). More-
over, JADE allows use of agent technology in vari-
ous areas, such as agent-based social networks mod-
eling (Bergenti et al., 2013b) and localization (Mon-
ica and Bergenti, 2016; Bergenti and Monica, 2016;
Monica and Bergenti, 2015). JADE was conceived
and developed in the early 2000’s, and its main de-
sign decisions were based on the available technolo-
gies. In particular, one of such technologies is Java,
which in those days was a novel and promising tech-
nology. Developers wanted to use Java, and the com-
mon opinion was that such a technology would have
been able to change software implementation pro-
cesses. Java represented an important step in the fast
progress of Web-oriented technologies, and it con-
tributed significantly to the growth of the Web. In such
a context, a pure Java approach seemed to be a per-
fect solution for a software framework that aims at
becoming a solid and reliable instrument, and which
can be also compatible with most of the other new
technologies. Such a choice turned out to be suc-
cessful, and nowadays JADE is recognized as one
of the most popular FIPA compliant agent frame-
works (Kravari and Bassiliades, 2015). Nevertheless,
our experience in using agent technologies and teach-
ing it to graduate students shows a slow regression of
the use of JADE. As a matter of fact, JADE develop-
ment of multi-agent systems is often perceived as a
difficult task, due to two main reasons. First, JADE
is constantly expanding and its continuous growth—
in terms of features, projects, and available APIs—
increases the complexity of the framework. For ex-
ample, there is a high number of implementation de-
tails that a developer must handle, in order to obtain a
non-trivial multi-agent system. Second, the language
that made success in the early 2000’s is now less
appealing to multi-agent system developers. In fact,
Java does not natively support agent-oriented tech-
nologies and methodologies. This is perceived as a
limitation and a source of errors. In order to address
such problems, we are working on a formal semantics
of JADE (Bergenti et al., 2015b).
JADEL project is motivated by the need of sim-
250
Bergenti F., Iotti E., Monica S. and Poggi A.
A Comparison between Asynchronous Backtracking Pseudocode and its JADEL Implementation.
DOI: 10.5220/0006205902500258
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 250-258
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

plification and renovation of JADE users experience.
JADEL provides abstractions and constructs which
focus on basic agent-oriented features of JADE, and it
aims at enforcing the expressiveness of such features
and simplifying the construction of multi-agent sys-
tems. A first idea of JADEL can be found in (Bergenti,
2014), and more recent developments are discussed
in (Bergenti et al., 2016c), where an overview of
JADEL syntax and its informal semantics is presented
and a first example is used to illustrate the described
syntax. Then, in (Bergenti et al., 2016a) and (Bergenti
et al., 2016b), the JADEL support at FIPA Interac-
tion Protocol is shown. This work shows an usage
of JADEL when the pseudocode of an algorithm is
given. The scope of such an exercise is to illustrate
the steps from pseudocode to implementation, and to
analyze the effort spent in doing such a task. Due to
the distributed nature of JADE, the algorithm chosen
as case study is a well-known procedure for solving
distributed constraint satisfaction problems.
The paper is organized as follows. First, in Sec-
tion 2, distributed constraint satisfaction problems are
defined and the notation is fixed. Then, in Section 3,
JADEL main abstractions and features are presented.
Section 4 shows the pseudocode together with the ac-
tual implementation, and, finally, Section 5 gives an
evaluation of the work. A brief recapitulation of the
work and its main results concludes the paper.
2 DISTRIBUTED CONSTRAINT
SATISFACTION PROBLEMS
A Constraint Satisfaction Problem (CSP) is a prob-
lem that consists in a finite set of variables and a fi-
nite set of constraints over such variables, i.e., predi-
cates defined on variables. As in (Yokoo et al., 1998),
we denote variables as x
1
, x
2
, . . . , x
n
. Each variable x
i
takes values in a domain, called D
i
. Constraints are
predicates defined on D
k1
× ··· × D
k j
, indicated by
p(x
k1
, . . . , x
k j
). A constraint is satisfied if the values
assigned to its variables make the predicate true. A
CSP is solved if and only if a value is assigned to each
variable, and each assignment satisfies all constraints.
A Distributed Constraint Satisfaction Problem
(DCSP) is a CSP where constraints and variables are
distributed among agents. Such agents control a num-
ber of variables and they know some predicates. Each
agent finds an assignment of its variable, i.e., a pair
(x
i
, d) where d ∈ D
i
, that satisfies its known con-
straints. By interacting among each others, they can
obtain the assignments performed by other agents,
and check if constraints are still satisfied. Informally,
a DCSP is solved if each agent finds a local solu-
tion that is coherent with other agents local solutions.
More specifically, a DCSP is solved if and only if each
agent has assigned a value to all of its variables and
all the constraints for all agents are satisfied by such
an assignment.
In (Yokoo and Hirayama, 2000), a survey of the
main algorithms for solving DCSPs is given. In par-
ticular, pseudocode and examples are shown for the
asynchronous backtracking, the asynchronous weak-
commitment search, the distributed breakout, and the
distributed consistency algorithms. We focus on the
asynchronous backtracking, called ABT. ABT algo-
rithm solves DCSPs that follow three assumptions:
each agent owns exactly one variable, all constraints
are in the form of binary predicates, and each agent
knows only the constraints that involve its variable.
We call x
i
the agent that owns the variable with the
same name. Because it is not necessarily true that
all agents in a multi-agent system know each others,
they can communicate only if there is a connection
between the sender and the receiver of the message.
For each agent, the agents who are directly connected
with it are called neighbors. In ABT, each agent main-
tains an agent view, which is the agent local view of its
neighbors assignments. Communication is addressed
by using two types of messages: OK and NoGood,
which work as instruments for exchanging knowledge
on constraints. More precisely, OK messages are used
to communicate the current value of the sender agent
variable, and NoGood messages provide the recipi-
ent with a new constraint. Agents are associated to a
priority order, which can be, e.g., the alphabetical or-
der of their names (or variables). OK messages flow
from top to bottom of the priority list of agents, and
NoGood messages, instead, go up from lowest prior-
ity agents to highest ones. Core of the algorithm is the
check agent view procedure, which controls if the cur-
rent known assignments are consistent with the agent
value. If not, procedure backtrack is used to send No-
Good constraints to neighbors. The rest of the algo-
rithm is given in terms of event handling constructs
which react at other agents messages. Its pseudocode
is shown and commented in Section 4, together with
its JADEL implementation.
3 A BRIEF OVERVIEW OF JADEL
JADEL provides some main abstractions, namely,
agents, behaviours, communication ontologies, and
roles in interaction protocols.
A JADEL agent can be defined by using the key-
word agent followed by its name. It has a life cy-
cle that consists in a start-up phase followed by an
A Comparison between Asynchronous Backtracking Pseudocode and its JADEL Implementation
251

execution phase and a take-down phase. In the start-
up phase the agent performs the instructions given in
its on-create handler, and in the take-down phase
it performs the instructions given in its on-destroy
handler. Usually, a sequence of tasks is added into the
internal list of the agent during its initialization, and
such tasks are performed during the execution phase.
New tasks can be added dynamically during the agent
life cycle, and old tasks can be removed. Note that, as
in JADE, agents are single-threaded entities that are
provided with an internal scheduler for the manage-
ment of their tasks. In JADE nomenclature, tasks are
called behaviours. Each behaviour describes an action
that the agent can perform. In fact, in JADEL, adding
tasks to the agent list is done by means of the expres-
sion activate-behaviour.
JADEL behaviours are associated to a type, which
can be cyclic or oneshot. Cyclic behaviours repre-
sent actions that remain in the agent behaviours list
after their execution. This means that the action of a
cyclic behaviour can be used one or more times dur-
ing agent life cycle. A one-shot behaviour, instead,
contains an action that terminates immediately and is
removed from the agent list after one execution. Ac-
tions can be triggered by the reception of a message,
which is an event, or they can start without waiting for
any event. JADEL has a specific construct for han-
dling message reception that provides also a control
over the type of message that the agent wants to re-
ceive. As a matter of fact, messages can be filtered by
using message templates, so the agent can react at the
correct message.
Ontologies are used in agents communication,
providing a set of propositions, concepts, and predi-
cates. Such terms compose a sort of dictionary, which
is usually organized in a hierarchical structure. Agents
which share such a dictionary can interact by us-
ing common terms as content of their messages.
JADEL provides an entity ontology, together with
a lightweight syntax that aims at simplifying the con-
struction of such dictionaries and their usage.
Finally, JADEL provides an abstraction for man-
aging roles in interaction protocols. Roles are partic-
ular behaviours, which are composed of a set of event
handlers. Each of such handlers covers a different step
of the chosen interaction protocol, by filtering mes-
sages through their performatives, as in FIPA spec-
ifications. Abstractions and constructs provided by
JADEL are a minimal set of entities needed in order
to actually run a JADE multi-agent system. JADEL
sources are translated into a readable and semantically
equivalent Java code that uses JADE APIs. This en-
sures a tight integration with Java and JADE, and it
allows developers to mix JADEL entities with native
JADE source code. JADEL agents can be created by
using JADE middleware, and they rely on the solid
JADE architecture.
4 ABT PSEUDOCODE AND
JADEL IMPLEMENTATION
In this Section, the ABT pseudocode is illustrated
and compared with the respective JADEL implemen-
tation. Pseudocode is taken exactly from (Yokoo and
Hirayama, 2000). JADEL syntax and details of ABT
implementation are described together with the code.
4.1 Agents
ABT pseudocode describes event handlers and main
procedures, but it does not illustrate how agents can
be written. In JADEL, an agent must be defined. Such
an agent is called ABTAgent. It consists of some prop-
erties, among which there are the agent view and the
neighbors set. The initialization of an ABTAgent is
done by filling the set of neighbors with the iden-
tifiers of connected agents, and by setting the prior-
ity of the agent itself. Moreover, ABTAgent provides
two important methods, namely, checkConstraints
and assignVariable. The former checks if all con-
straints are satisfied by current assignments in agent
view; the latter selects a value which is consistent with
agent view and assigns it to the variable owned by the
agent. Both methods return a boolean value: true if
the operation was successful and false if it is was
not.
4.2 Procedures
As said in Section 2, core of the ABT algorithm is the
check agent view procedure, which controls if the cur-
rent value my value ∈ D
i
of the agent x
i
is consistent
with its agent view. A value d ∈ D
i
is called consistent
with the agent view if for each value in agent view,
all constraints that involve such value and d are sat-
isfied. If this is not the case, the agent has to search
for another value. At the end, if none of the values
in D
i
satisfies the constraints, another procedure is
called, namely, the backtrack procedure. Otherwise,
an OK message is sent to the agent neighbors, which
contains the new assignment. The pseudocode of the
check agent view procedure is shown in Figure 1. In
JADEL implementation of ABT, the check agent view
procedure becomes a one-shot behaviour. In fact, its
action has to be performed only once, when the be-
haviour activates.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
252

Procedure check agent view
when agent view and my value are inconsistent do
if no value in D
i
is consistent with agent view
then
backtrack
else
select d ∈ D
i
where agent view and d are con-
sistent
my value ← d
send(OK, (x
i
, d)) to neighbors
end if
end do
Figure 1: Procedure check agent view.
oneshot behaviour Chec kA ge nt Vi ew
for A BTA ge n t {
The keyword for denotes which agents are allowed to
activate such a behaviour. In this case, such agents are
instances of the ABTAgent class. Inside the behaviour,
methods and public fields of the agent can be called
by using the field theAgent, which is implicitly ini-
tialized with an instance of the agent specified. If no
agent is specified with the for keyword, theAgent
refers to a generic agent.
The CheckAgentView behaviour does not need to
wait for messages, or events, so the keyword do is
used. It denotes an auto-triggering action.
do {
if(! t he A ge nt . c he ck Co ns t r a i n ts () ) {
if(! t he A ge nt . a ss ig nV ar ia bl e () ) {
activate behaviour
Ba ckt ra ck ( t he A ge nt )
} else {
activate behaviour
Sen dOK ( t he Age nt )
}
}
}
The procedure backtrack is defined in Figure 2. First,
a new NoGood constraint has to be generated. Gen-
erating a NoGood is done by checking all assign-
ments that are present into the agent agent view. If
one of these is removed, and then the agent succeeds
in choosing a new value for its variable, it means that
such an assignment is wrong. Hence, that assignment
is added to the NoGood constraint. After this phase,
the new generated NoGood can be empty or not. If no
assignment appears within that new constraint, then
there is no solution for the DCSP. Otherwise, a No-
Good message has to be sent to the lowest priority
agent, and then its assignment has to be removed from
agent view. Then, a final check of the agent view is
Procedure backtrack
generate a nogood V
when V is an empty nogood do
broadcast to other agents that there is no solution
terminate this algorithm
end do
select (x
j
, d
j
) where x
j
has the lowest priority in a
nogood
send(nogood, (x
i
, V )) to x
j
remove (x
j
, d
j
) from agent view
check agent view
Figure 2: Procedure backtrack.
done. JADEL implementation of such a procedure is
another one-shot behaviour, whose code follows pre-
cisely the pseudocode in Figure 2.
oneshot behaviour Ba ckt ra ck
for A BTA ge n t {
do {
var V = new HashMa p <AID , In teger >(
th eAg en t . ag e nt vi ew )
var s or te d Va ri ab le sL i s t = V . ke ySe t .
sort
V. re m ov e ( t he Ag e nt . AID )
for( v : s or te dV ar ia b l e sL is t ) {
var r e mo ved = V . r em o ve (v )
if( the Ag ent . as si gn Va ri ab le (V ) )
V. put (v , re m ov ed )
}
if( V. is Emp ty ){
activate behaviour
Se nd No So lu ti on ( t he Ag e nt )
} else {
activate behaviour
Se nd NoG oo d ( theAg ent , V )
th eAg en t . ag e nt vi ew . re mov e ( V .
key Set . max )
activate behaviour
Ch ec kA ge nt Vi ew ( t he Ag e nt )
}
}
}
4.3 Event Handlers
Others procedures specified in Yokoo ABT pseu-
docode concern the reception of messages.
When the agent receives an OK message, it has to
update its agent view with that new information, then
it must check if the new assignment is consistent with
others in agent view, as in Figure 3. The reception of
a message requires a cyclic behaviour, which waits
A Comparison between Asynchronous Backtracking Pseudocode and its JADEL Implementation
253
when received (OK, (x
j
, d
j
)) do
revise agent view
check agent view
end do
Figure 3: Reception of an OK message.
cyclically for an event and checks if such an event is
a message.
cyclic behaviour Re cei ve Ok
for A BTA ge n t {
To ensure that such a message is the correct one,
namely, an OK message, some conditions have to be
specified. JADEL provides the construct on-when-do
to handle this situation. The clause on identifies the
type of event and eventually gives to it a name. If the
event is a message, the clause when contains an ex-
pression that filters incoming messages.
on message msg
when {
ontology is ABT Ont o and
performative is INF ORM and
content is OK
}
Conditions in when clause can be connected by log-
ical connectives and, or, and they can be preceded
by a not. They refer to the fields of the message,
namely, ontology, performative, and content.
Fields that are not relevant can be omitted, and
multiple choices can be specified. For example a
behaviour can accept REQUEST or QUERY IF mes-
sages, as follows: performative is REQUEST
or performative is QUERY IF. The clause do
is mandatory and contains the code of the action.
do {
extract r ec e iv ed OK as OK
val a = r ec eiv ed OK . a ss ig nm ent
th eAg en t . ag e nt vi ew . r epl ace ( a . index ,
a. val ue )
activate behaviour
Ch ec kA ge nt Vi ew ( t he Ag e nt )
}
The content of the message is obtained by means
of the JADEL expression extract-as, which man-
ages all the needed implementation details and gives
a name and a type to the content. Once the content
of type OK of the message is obtained, its assignment
when received (nogood, (x
j
, V )) do
record V as a new constraint
when V contains an agent x
k
that is not its neigh-
bor do
request x
k
to add x
i
as a neighbor
add x
k
to its neighbor
end do
old value ← current value
check agent view
when old value = current value do
send(OK, (x
i
, current value)) to x
j
end do
end do
Figure 4: NoGood message reception.
is used to revise the agent view. Then, the behaviour
CheckAgentView is activated.
Finally, the pseudocode of the procedure that man-
ages the reception of a NoGood message is shown in
Figure 4. In JADEL, such a procedure is a cyclic be-
haviour for ABTAgent.
cyclic behaviour Re ce iv eN oG oo d
for A BTA ge n t {
Checking if the event is a message, and then, if the
message is actually a NoGood message, is done simi-
larly to the OK reception, by using the clauses on and
when, as shown in the following code.
on message msg
when {
ontology is ABT Ont o and
performative is INF ORM and
content is NoG ood
}
Inside the do body, the message content is extracted
as a NoGood and it is recorded as a new constraint.
We assume that the agent holds a set of constraints
within the field constraint which is accessed by the
agent instance theAgent.
do {
extract r ec ei ve dN oG oo d as N oGo od
val n ew Co ns tr ai nt s = re ce iv ed No Go od .
as si gn me nt Li st
th eAg en t . co ns tr a in ts .
put All ( n e w C o n s t r a i n t s )
Then, if some constraints involve an agent which is
not in the agent neighborhood, a request is sent to
such an agent, in order to create a new link.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
254

for ( x : ne wC on st ra in ts . key S et ) {
if (! t heA ge nt . n eig hb or s .
co nta in s ( x) ) {
activate behaviour
Se nd Re que st ( t heAgen t , x )
th eAg en t . ne i gh bo rs . add ( x )
}
}
Finally, the agent view must be checked, and if the
previous value of the agent variable x
i
remains un-
changed, an OK message is sent.
var o ldV al u e = t he Ag e nt . a ge nt v ie w .
get ( th e Ag ent . AID )
activate behaviour
Ch ec kA ge nt Vi ew ( t he Ag e nt )
if ( ol dV alu e == t heA ge nt . a gen tv ie w .
get ( the Ag ent . AID )) {
activate behaviour
Sen dOK ( t he Age nt )
}
5 EVALUATION
The comparison between ABT pseudocode and its
JADEL implementation is done by defining some
metrics, which help us to get an idea of JADEL
advantages and disadvantages. Then, we compare
JADEL code with an equivalent JADE code, measur-
ing the amount of code written, and the percentage
of domain-specific features of such a code. Finally,
we shows an example of usage of ABT algorithm and
we measure the time of execution of JADEL, and the
number of messages exchanged.
Methods to evaluate domain-specific modeling
languages can be found in, e.g., (Challenger et al.,
2015), which focuses on multi-agent systems. Other
surveys, such as (Mernik et al., 2005) and (Oliveira
et al., 2009), highlight the main advantages of
domain-specific languages usage. Nevertheless, com-
paring a pseudocode with an actual implementation
is a difficult task, due to the informal nature of the
pseudocode, and the implicit technical details it hides.
Moreover, pseudocodes from different authors may
look different, depending on their syntax choices and
their purpose. As far as we know, there are not stan-
dard methods for evaluating the closeness of a code
to a pseudocode, and its actual effectiveness in ex-
pressing the described algorithm. Hence, we limit our
evaluation to the use case of JADEL shown in this pa-
per: the ABT example presented in previous sections.
This choice permits us to make some considerations
about the pseudocode.
First, ABT pseudocode is presented by means of
procedures and event handlers, with the aid of the key-
words when and if. Second, the notation used inside
the ABT pseudocode is the same of the DCSP for-
malization, shown in Section 2. As a matter of fact,
there are agentview and neighbors sets, and assign-
ments are denoted as (x
i
, d
i
), where x
i
is the vari-
able associated with the i-th agent, and d
i
∈ D
i
. A
message is identified according to its type and its
content, i.e., (OK, (x
i
, d
i
)) for an OK message, or
(nogood, (x
i
, V )) for a NoGood. Such characteristics
of ABT pseudocode allow us to talk about ‘similar-
ity’ between it and the JADEL code. In fact, in the
JADEL methodology, both procedures and event han-
dlers are represented as behaviours of the agent. In
particular, procedures are one-shot behaviours that
define an auto-triggering actions, while event han-
dlers are cyclic behaviours, each of them waits for the
given event and then performs its action. Hence, we
can associate each behaviour with a procedure/event
handler, and analyze each of them separately. Calls
of procedures in ABT pseudocode translate into the
activation of the corresponding behaviour in JADEL.
Also sending a message is done by activating a spe-
cific JADEL behaviour. Hence, we associate each
send instruction in ABT pseudocode to that activa-
tion. The DCSP notation is used also in JADEL, by
means of the two mappings theAgent.agentview and
theAgent.neighbors, and by defining some ontology
terms. As a matter of fact, terms OK and NoGood
are predicate in a JADEL ontology, and they con-
tain an assignment, and a list of assignments, re-
spectively. Each assignment consists in a index and
a value, i.e., x
i
and d
i
, respectively. Index and vari-
ables are intentionally confused because we identify
each agent with its variable. The domain D
i
of a vari-
able is defined once in the start-up phase of the agent
and it is never modified during the execution of its ac-
tions. We associate ABT pseudocode notations with
the respective JADEL notation described above. Fi-
nally, the reception of a message is done by using the
construct on-when-do, which is the corresponding of
ABT pseudocode construct when received(. . . ) do.
In summary, (i) ABT procedures are associated
with JADEL oneshot behaviours, (ii) ABT event han-
dlers are associated with JADEL cyclic behaviours,
(iii) procedure calls and send instructions are asso-
ciated with the correct behaviour activation, (iv) ref-
erences to agentview or agent neighborhood are as-
sociated with the respective JADEL agent fields, (v)
receptions of messages are associated with JADEL
constructs and expressions that concern reception and
A Comparison between Asynchronous Backtracking Pseudocode and its JADEL Implementation
255
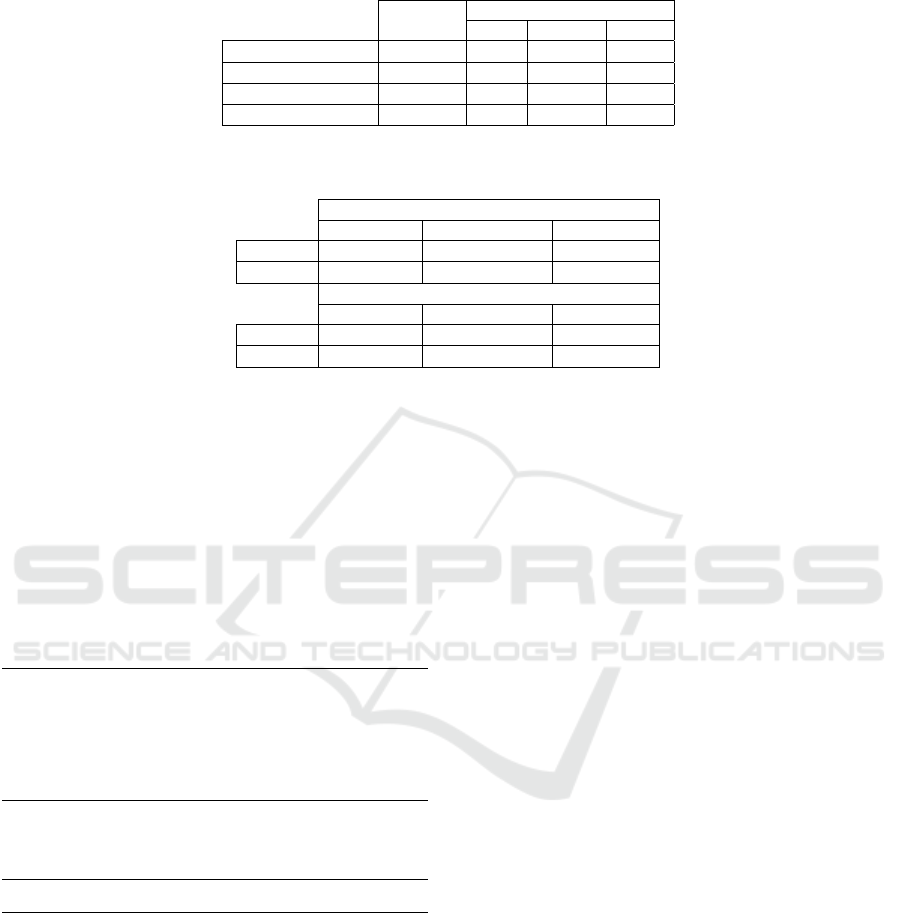
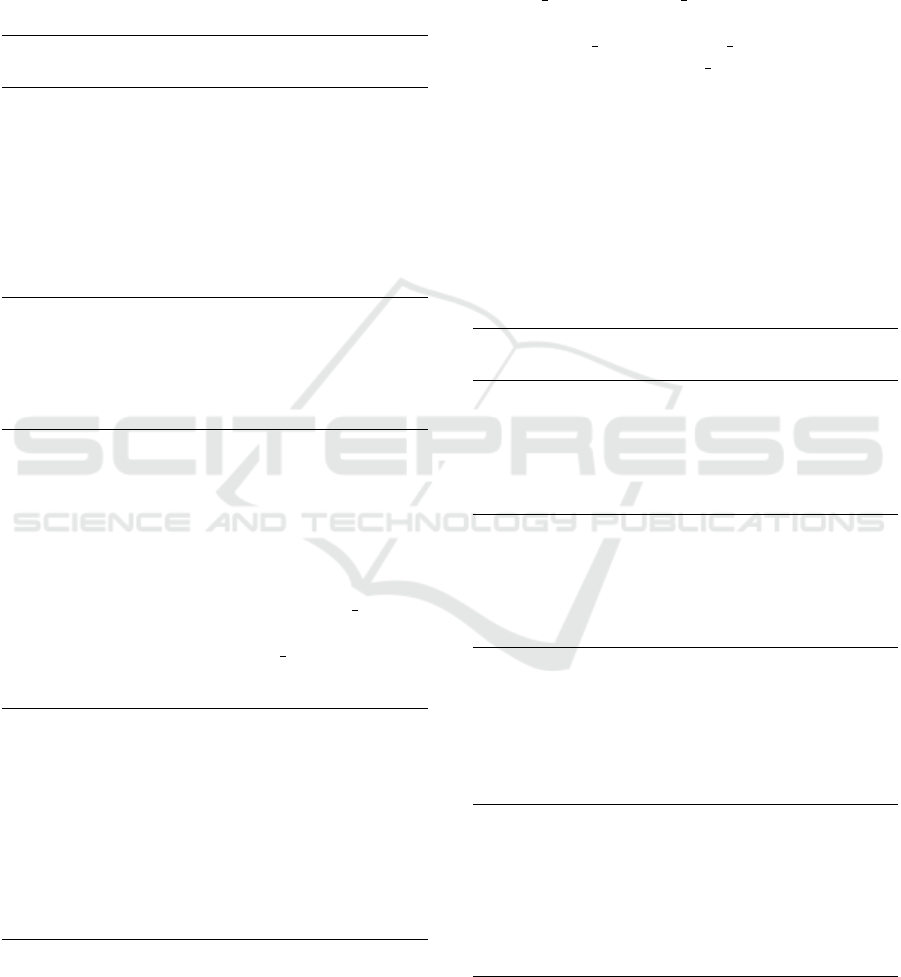
Table 1: Metrics for distance between ABT pseudocode and JADEL implementation in terms of number of LOCs, and their
complexity in terms of depth. The depth of an equivalent JADE implementation is also shown.
Distance Complexity
(LOCs) ABT JADEL JADE
Check Agentview 2 2 3 5
Backtrack 6 1 3 6
Receive OK 6 1 1 4
Receive NoGood 7 2 3 4
Table 2: Number of LOC and percentage of Agent-Oriented (AO) features over the total number of LOC, for JADEL and
JADE implementation of the ABT example.
JADEL
ABTAgent ABTOntology Behaviours
LOCs 57 7 138
AO (%) 12 86 41
JADE
ABTAgent ABTOntology Behaviours
LOCs 149 113 380
AO (%) 6 23 20
content extraction from a message. We will say, in
the following, that a line of ABT pseudocode cor-
responds to a line (or, a set of lines) of JADEL im-
plementation, if it falls in one of the previous cases.
Then, for each line of ABT pseudocode, we mea-
sure the number of the corresponding Lines Of Code
(LOC) of JADEL implementation. The absolute value
of the difference between ABT lines and correspond-
ing JADEL LOC is used as a first, rough, distance.
For example, in the reception of an OK message,
the first line of the pseudocode corresponds to the
on-when-do constructs to capture the correct event.
on message msg
when {
ontology is ABT Ont o and
performative is INF ORM and
content is OK
}
Moreover, the extract-as expression is used to ob-
tain the message content.
extract r ec eiv ed OK as OK
Hence, we can conclude that in this case there are six
LOCs instead of one line of the pseudocode. Thus, the
distance is of 5 LOCs. Such a distance gives us an idea
of the amount of code which is necessary to translate
pseudocode into JADEL, in case of ABT example. A
summary is shown in Table 1.
Then, we want to quantify the ‘complexity’ of the
code. In fact, JADEL code sounds similar to ABT
pseudocode also because of its structure. We use the
depth of each block of code as a measure. As we
can see in Table 1, ABT pseudocode and JADEL
implementation do not differ significantly in terms
of complexity. To this extent, JADEL code often re-
quires one more level (the do block), but its struc-
ture is usually very similar to ABT pseudocode. The
complexity measure makes sense when JADEL code
is compared to the equivalent JADE one. Such an
equivalent implementation is obtained directly from
JADEL compiler, which translates JADEL code into
Java and uses JADE APIs. In fact, JADEL enti-
ties translate into classes which can extend JADE
Agent, CyclicBehaviour, OneShotBehaviour, and
Ontology base classes, while JADEL event handlers
translate into the correct methods of JADE APIs, in
order to obtain the desired result. JADE code is au-
tomatically generated from the JADEL one, and this
means that the final code may introduce some redun-
dancy or overhead. For this reason, we also write a
JADE code that implements ABT algorithm directly.
Nevertheless, this alternative implementation is as
complex as JADE generated code, because of some
implementation details that JADE requires.
A comparison between JADEL and JADE imple-
mentation is made in terms of amount of code, i.e.,
by counting the number of non-comment and non-
blank LOCs of each entity, namely, the ABTAgent,
the ABTOntology, and all the behaviours. Results are
shown in Table 2. In order to emphasize the advan-
tage in using JADEL instead of JADE, the percent-
age of lines which contains Agent-Oriented (AO) fea-
tures over the total number of LOCs is also shown.
We define as AO features each reference to the agent
world. For example, keywords agent, behaviour,
ontology are AO features, but also special expres-
sions such as activate-behaviour. In JADE, AO
features are simply the calls to the API. Table 2
shows that the JADEL implementation is far more
lighter than the JADE one, and that it is denser of
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
256
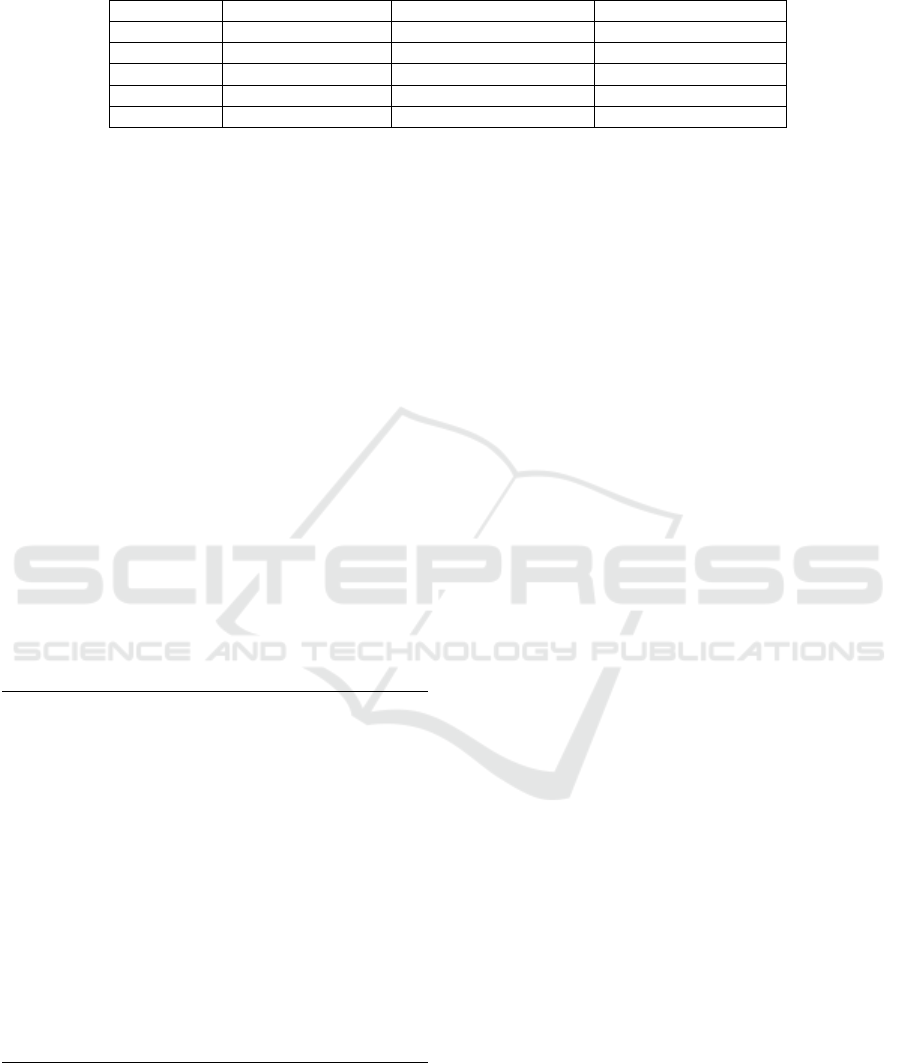
Table 3: Average number of messages exchanged, average elapsed time of execution, and average total number of assignments
of the n-queens problem, for n = 4, 5, 6, 7, 8.
# of Queens Avg. # of Messages Avg. Elapsed Time (ms) Avg. # of Assignments
4 20.54 132.05 11.68
5 15.44 113.19 9.40
6 37.00 236.50 17.00
7 63.63 462.25 32.50
8 197.00 1178.50 77.50
AO features. Such measures can be viewed as an in-
dication of simplicity of JADEL code with respect
to JADE. Finally, we test JADEL implementation of
ABT algorithm on a well-known example of DCSP.
As in (Yokoo et al., 1992), we use ABT for solving
the n-queens problem. The n-queens problem consists
in placing n pieces of chess queens on a n × n chess-
board, so that each queen is safe from others. A solu-
tion of such a problem requires, in fact, that a queen
does not share a row, a column or a diagonal with
any other queen on the chessboard. Formalizing the
n-queens problem needs the use of an agent for each
queen, and the association of each queen to a row of
the chessboard (equivalently, a column). So, the i-th
queen, represented by the variable x
i
, slides on the i-th
row. This means that the variable x
i
takes values into
D
i
= {1, . . . , n}. Hence, the constraints are formalized
as follows. For each x
i
, x
j
, the following inequalities
need to hold: x
i
6= x
j
and |x
i
−x
j
| 6= |i− j|. The imple-
mentation in JADEL of such a problem requires only
to extend the ABTAgent entity, defining the new con-
straints into the checkConstraints method of the
agent, as follows.
boolean c he ck Co ns tr a i n ts () {
if (! c h ec kN oG oo d C o ns tr ai nt () ) {
return fa lse
}
for( i : 0 .. < my I nd ex ) {
var key = s or te dA ge nt s . g et (i )
if ( a g en tv iew . co n ta in sK ey ( key ) ) {
val va lue = ag ent vi ew . get ( ke y )
if ( my Val ue == v alu e || ( Ma th .
abs ( myV alu e - v alue ) == Math .
abs ( myI nde x - i) ) ) {
return fa lse
}
}
}
return tru e
}
We measure the effectiveness of the algorithm in
terms of number of messages and time. Distributed
systems are evaluated by means of their usage of
memory, the time of execution, and the amount of
messages exchanged, but we can only measure those
last two parameters, due to the garbage collector of
Java, that falsify the actual memory usage. Then, an
evaluation of the effectiveness of ABT implementa-
tion is given in terms of the number of assignments
that each agent performs during the computation. Re-
sults are shown in Table 3.
6 CONCLUSIONS
In this paper, a comparison between the implementa-
tion of ABT algorithm with the novel agent-oriented
language JADEL and the ABT pseudocode is shown.
First, JADEL and JADE are briefly presented, then
DCSP problems and ABT algorithm notations are de-
fined and described. Given the official presentation of
ABT pseudocode, we made a point-to-point transla-
tion of such a pseudocode in JADEL. Finally, some
metrics are defined and some measurements are made
in order to evaluate the effectiveness of the language
in such a context, and its closeness to ABT pseu-
docode. The proposed metrics are (i) a measure of dis-
tance, in terms of LOCs, between ABT pseudocode
and its JADEL implementation, (ii) a measure of com-
plexity, based on the depth of the block of codes, (iii)
the number of LOCs and the percentage of AO fea-
tures of JADEL code and JADE equivalent, and (iv)
the average number of messages and time of execu-
tion of JADEL version of ABT, when used for solving
the n-queens problem, for n = 4, 5, 6, 7, 8.
Not all of such metrics can be interpreted as com-
plete or significant in every situation, because they
cannot fully describe qualitative factors, such as read-
ability, re-usability or maintainability. In fact, dis-
tance and complexity can be different depending on
the type of pseudocode given, and there is not a stan-
dard way for evaluating pseudocodes due to their in-
herent informality. Also, numbers of LOCs and per-
centage of AO features do not refer to the quality
of the code. However, such measurements help us in
evaluating simplicity and giving an idea of the ex-
pressiveness and effectiveness of the language. As a
matter of fact, JADEL distance from pseudocode is
very small, and we argue that this fact may help devel-
opers in translating an idea of distributed algorithms
into a working JADE multi-agent system. When cod-
ing it directly in JADE, in fact, the number of LOCs
A Comparison between Asynchronous Backtracking Pseudocode and its JADEL Implementation
257

required increases considerably, making its distance
from pseudocode very high. This is mainly due to the
very high number of implementation details that hide
behind JADEL code, and the structure itself of Java
language and JADE APIs. In summary, JADE obtains
good results in simplifying and shortening the task of
writing code. Then, as a last evaluation, the metrics
for distributed systems are used, showing good per-
formance of the language. When using JADE instead
of JADEL, the number of messages is about the same,
while the performance is slightly better, due to the re-
dundancy and overhead introduced by JADEL com-
piler in generating Java code.
As a future development of this work, JADEL can
be tested on other algorithms, making other compar-
ison between pseudocodes and JADEL code, in or-
der to gain a more complete view. Moreover, other fa-
mous agent-oriented programming languages, such as
3APL, Jason, SARL, can be compared with JADEL,
in terms of translating a given pseudocode. Finally,
the best evaluation could be that of JADE developers,
when JADEL will be released. In summary, this pa-
per takes place into a larger project of presentation of
JADEL and evaluation of its possibilities. This work
shows how to produce JADEL code from a pseu-
docode and measures how simple or complex this task
can be.
REFERENCES
Bellifemine, F., Bergenti, F., Caire, G., and Poggi, A.
(2005). JADE – A Java Agent DEvelopment frame-
work. In Multi-Agent Programming. Springer.
Bergenti, F. (2014). An introduction to the JADEL program-
ming language. In Procs. IEEE 26
th
Int’l Conf. on
Tools with Artificial Intelligence (ICTAI). IEEE Press.
Bergenti, F., Caire, G., and Gotta, D. (2013a). An overview
of the AMUSE social gaming platform. In Procs.
Workshop Dagli Oggetti agli Agenti (WOA 2013), vol-
ume 1099 of CEUR Workshop Proceedings.
Bergenti, F., Caire, G., and Gotta, D. (2014). Agents on the
move: JADE for Android devices. In Procs. Workshop
Dagli Oggetti Agli Agenti (WOA 2014), volume 1260
of CEUR Workshop Proceedings.
Bergenti, F., Caire, G., and Gotta, D. (2015a). Large-scale
network and service management with WANTS. In
Industrial Agents: Emerging Applications of Software
Agents in Industry. Elsevier.
Bergenti, F., Franchi, E., and Poggi, A. (2011). Agent-based
social networks for enterprise collaboration. In Procs.
20
th
Int’l Conf. Enabling Technologies: Infrastructure
for Collaborative Enterprises (WETICE 2011). IEEE
Press.
Bergenti, F., Franchi, E., and Poggi, A. (2013b). Agent-
based interpretations of classic network models. Com-
putational and Mathematical Organization Theory,
19(2).
Bergenti, F., Iotti, E., Monica, S., and Poggi, A. (2016a).
A case study of the JADEL programming language.
In Procs. Workshop Dagli Oggetti agli Agenti (WOA
2016), volume 1664 of CEUR Workshop Proceedings.
Bergenti, F., Iotti, E., Monica, S., and Poggi, A. (2016b).
Interaction protocols in the JADEL programming lan-
guage. In Procs. 6
th
Int’l Workshop on Programming
Based on Actors, Agents, and Decentralized Control
(AGERE!).
Bergenti, F., Iotti, E., and Poggi, A. (2015b). Outline of a
formalization of JADE multi-agents system. In Procs.
Workshop Dagli Oggetti agli Agenti (WOA 2015), vol-
ume 1382 of CEUR Workshop Proceedings.
Bergenti, F., Iotti, E., and Poggi, A. (2016c). Core fea-
tures of an agent-oriented domain-specific language
for JADE agents. In Trends in Practical Applications
of Scalable Multi-Agent Systems, the PAAMS Collec-
tion. Springer.
Bergenti, F. and Monica, S. (2016). Location-Aware Social
Gaming with AMUSE. In Trends in Practical Appli-
cations of Scalable Multi-Agent Systems, the PAAMS
Collection (PAAMS 2016).
Challenger, M., Kardas, G., and Tekinerdogan, B. (2015).
A systematic approach to evaluating domain-specific
modeling language environments for multi-agent sys-
tems. Software Quality Journal.
Foundation for Intelligent Physical Agents (2002). FIPA
specifications. Multi-agents system standard specifi-
cations. http://www.fipa.org/specifications.
Kravari, K. and Bassiliades, N. (2015). A survey of agent
platforms. Journal of Artificial Societies and Social
Simulation, 18(1).
Mernik, M., Heering, J., and Sloane, A. M. (2005). When
and how to develop domain-specific languages. ACM
computing surveys (CSUR), 37(4).
Monica, S. and Bergenti, F. (2015). Location-aware JADE
agents in indoor scenarios. In Procs. Workshop Dagli
Oggetti agli Agenti (WOA 2015), volume 1382 of
CEUR Workshop Proceedings.
Monica, S. and Bergenti, F. (2016). A comparison of accu-
rate indoor localization of static targets via WiFi and
UWB ranging. In Advances in Intelligent Systems and
Computing (PAAMS 2016), Special Session on Agents
and Mobile Devices (AM).
Oliveira, N., Pereira, M. J., Henriques, P., and Cruz, D.
(2009). Domain specific languages: A theoretical sur-
vey. In INFORUM’09 Simp
´
osio de Inform
´
atica. Fac-
uldade de Ci
ˆ
encias da Universidade de Lisboa.
Poggi, A. and Bergenti, F. (2010). Developing smart emer-
gency applications with multi-agent systems. Int. J.
E-Health Med. Commun., 1(4).
Yokoo, M., Durfee, E. H., Ishida, T., and Kuwabara, K.
(1998). The distributed constraint satisfaction prob-
lem: Formalization and algorithms. IEEE Transac-
tions on Knowledge and Data Engineering, 10(5).
Yokoo, M. and Hirayama, K. (2000). Algorithms for dis-
tributed constraint satisfaction: A review. Autonomous
Agents and Multi-Agent Systems, 3(2).
Yokoo, M., Ishida, T., Durfee, E. H., and Kuwabara, K.
(1992). Distributed constraint satisfaction for formal-
izing distributed problem solving. In Procs. 12
th
Int’l
Conf. Distributed Computing Systems. IEEE Press.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
258
