
Performance Evaluation of Default Active Message Layer (AM) and
TKN15.4 Protocol Stack in TinyOS 2.1.2
Diego V. Queiroz
1
, Ruan D. Gomes
1,2,3
and Cesar Benavente-Peces
1
1
Signal Theory and Communications Department, Universidad Politecnica de Madrid, Madrid, Spain
2
Informatics Coordination, Federal Institute of Paraiba, Guarabira, Brazil
3
Post-Graduate Program in Electrical Engineering, Federal University of Campina Grande, Campina Grande, Brazil
Keywords:
Wireless Sensor Networks, TinyOS, TKN15.4, Active Message, IEEE 802.15.4.
Abstract:
Wireless Sensor Networks (WSN) have become a leading solution to monitor and control smart buildings,
health, industrial environments, and so on. Sensor nodes in a WSN have resource constraints, presenting low
processing power and, in some cases, restrictions in power consumption. The resource constraints forced the
researchers to develop Operating Systems (OS) for low-power wireless devices, and one of the most important
and in active use is the TinyOS. This paper presents an experimental study to evaluate the performance of
TinyOS default Active Message (AM) layer protocol in comparison to the fully 802.15.4 compliant proto-
col stack TKN15.4 developed for TinyOS. The AS-XM1000 802.15.4 mote modules were used to compare
both protocols. The results showed that TKN15.4 protocol is better in both energy consumption and packet
reception rate.
1 INTRODUCTION
Wireless Sensor Networks (WSN) present significant
advantages in comparison to wired networks, such as
flexibility, reconfigurability, easy installation/mainte-
nance, ability of self-organization and local process-
ing, becoming a promising platform to implement on-
line systems for remote monitoring and controlling
in different types of environment. Despite these ad-
vantages, the WSN work in an inherently unreliable
communication medium, so they are subject to typ-
ical problems of wireless channels such as attenua-
tion, multipath, shadowing, fading, noise and inter-
ference in the spectrum band used for communication
and shared by a number of users, e.g. in the 2.4 GHz
band.
There are many environments where the wireless
nodes can be deployed. Among home, office, and in-
dustry, the industrial environment is harsher due to the
unpredictable variations of temperature, pressure, hu-
midity, and so on. In addition, the wireless channel
in many industries is non-stationary for a long term,
which can cause abrupt changes in the characteristics
of the channel over time (Agrawal et al., 2014). In in-
dustry, the coherence bandwidth is low due to the high
level of multipath fading, which causes differences in
the characteristics of the different channels, since they
are uncorrelated in frequency, and the impact of mul-
tipath is different for different channels. In addition,
changes in the topology of the environment, such as
the movement of a large metal structure, people and
reflections, may cause changes in the characteristics
of the channel over time (Gomes, R. D. et al., 2016).
The lack of reliability in the communication
medium makes it difficult to establish Quality of Ser-
vice (QoS) guarantees with reduced CAPital EX-
penditure (CAPEX) and OPerational EXpenditure
(OPEX). Therefore, the sensors, including their soft-
wares, need to be low-cost, resulting in a set of restric-
tions, such as low data rate and low processing capa-
bilities. For this reason, Operating Systems (OS) such
as TinyOS, Contiki, OpenWSN, RIOT and FreeR-
TOS were developed, and designed to run on de-
vices that are severely constrained in memory, power
consumption, processing power, and communication
bandwidth.
According to (Amjad et al., 2016), TinyOS is the
most suitable OS to operate in a resource-starved net-
work, such as WSN. It is an OS designed for low-
power wireless embedded systems. Fundamentally, it
is a work scheduler and a collection of drivers for mi-
crocontrollers commonly used in wireless embedded
platforms. TinyOS programs are composed into event
handlers and tasks with run-to-completion semantics.
Queiroz D., Gomes R. and Benavente-Peces C.
Performance Evaluation of Default Active Message Layer (AM) and TKN15.4 Protocol Stack in TinyOS 2.1.2.
DOI: 10.5220/0006204200690079
In Proceedings of the 6th International Conference on Sensor Networks (SENSORNETS 2017), pages 69-79
ISBN: 421065/17
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
69

When an external event occurs, such as an incoming
data packet or a sensor reading, TinyOS calls the ap-
propriate event handler to deal with the event (Wang
and Balasingham, 2010). Both the TinyOS system
and programs developed for this OS are written in
nesC, which is an extension of the C programming
language.
As alternatives to TinyOS, stand out: Contiki,
which is an open-source OS for the IoT, and connects
tiny low-cost, low-power microcontrollers to the In-
ternet; Berkeley OpenWSN, which is an open-source
stack intending to implement low-power wireless
standards such as IEEE 802.15.4e, 6LoWPAN, RPL
and CoAP, and is rooted in the new IEEE802.15.4e
TSCH; FreeRTOS, which is a popular Real Time Op-
erating System (RTOS) that has been ported to many
microcontrollers, and its preemptive microkernel has
support for multi-threading with statically instantiated
tasks; and RIOT, which is also a real time OS and was
developed with focus on the requirements of IoT.
The latest version of TinyOS was released in
2012 (2.1.2), bringing support for updated msp430-
gcc (4.6.3) and avr-gcc (4.1.2), and a complete 6low-
pan/RPL IPv6 stack. Currently, TinyOS develop-
ment was migrated to GitHub
1
, where the researchers
can contribute to its development. The OS includes
TOSSIM, a high-fidelity mote simulator that compiles
directly from nesC code, scaling to thousands of sim-
ulated nodes. TOSSIM gives the programmer an om-
niscient view of the network and greater debugging
capabilities. Server-side applications can connect to a
TOSSIM proxy just as if it were a real sensor network,
easing the transition between the simulation environ-
ment and actual deployments (Levis, P. et al., 2009).
Different types of hardware platforms support
TinyOS in the WSN domain. These different plat-
forms introduce their own interrupts relating to their
hardware designs (Hill, Jason, and David Culler,
2002). To port from one hardware platform to an-
other, TinyOS developers have introduced a hardware
abstraction architecture, and it can be classified into
three layers (Amjad et al., 2016), (Handziski et al.,
2005), as follows:
1. Hardware Interface Layer (HIL): comprises
hardware-independent components, interfaces
and events;
2. Hardware Presentation Layer (HPL): close to the
hardware layer. The components of this layer
are not picked by applications but are used by
hardware in some particular tasks;
1
https://github.com/tinyos - Access in 09/12/2016.
Figure 1: Model of testbed used in the performance eval-
uation, XM1000 (Advanticsys), and one coordinator con-
nected to USB port.
3. Hardware Adaptation Layer (HAL): layer that fa-
vors hardware functionality, and is closer to the
HPL.
Among the main platforms supported by TinyOS,
are TelosB, Tmote Sky, MicaZ, Mica2, Zolertia Z1,
GINA, IRIS, and XM1000, which is based on TelosB.
In this paper, XM1000 platform is used to perform the
experiments. In the experiments, seven motes were
used, and five of them are depicted in Fig. 1.
The XM1000 is the new generation of mote mod-
ules, based on TelosB technical specifications, with
upgraded 116Kb-EEPROM and 8Kb-RAM and inte-
grated Temperature, Humidity and Light sensors. Be-
sides TinyOS 2.1.2, it is also compatible with Contiki
2.7 (latest version of Contiki is 3.0
2
). Its processor
belongs to Texas Instruments MSP430 family, the RF
Chip is CC2420 and has range of around 120m (out-
door), and 20-30m (indoor), in which longer ranges
are possible with optional SMA antenna attached. Its
current consumption is of 18.8mA for RX, 17.4mA
for TX, and 1uA when the device is in sleep mode.
The experiment described in this paper evalu-
ates the performance of the default Active Message
(AM) protocol of TinyOS and TKN15.4, and com-
pares both in order to choose the best protocol suited
for general-purpose applications, including industrial
applications. For this, two example applications de-
signed by TinyOS and TKN15.4 developers were
used, in which one sends and receives packets using
timers, and the other uses the beacon-enabled mode
of IEEE 802.15.4 standard, respectively. Actually, in
this work both applications were adapted to perform
the same tasks. The only difference between them is
that in TKN15.4, beacons were used to synchronize
with its coordinator. The motivation for these tests
is to see the feasibility of using those protocols for
WSN in industrial environments/applications without
stringent requirements on reliability and predictable
real-time performance, as defined by (De Guglielmo
et al., 2016). Examples of applications with stringent
timing requirements are Military/Defense and Health-
care applications, and in some hazardous industrial
2
Released in 26 Ago 2015.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
70

environments, such as chemical/biotechnology.
It is worthy to note that the IEEE 802.15.4
MAC frame format is different from the frame for-
mat used in default AM TinyOS protocol. There-
fore, there is an optional implementation called
T KN154ActiveMessageP.nc that abstracts AM over
the nonbeacon-enabled variant of IEEE 802.15.4
MAC. In this optional implementation, the upper
layer in TinyOS will see the actual AM payload, and
before passing frames down to the 15.4 MAC, the im-
plementation makes sure that the AM type (and net-
work byte) are moved to the MAC payload portion.
This workaround involves extra memmove functions
(C library function that copies n characters from str2
to str1, which is a safer approach than memcpy func-
tion for overlapping memory blocks). Since it re-
quires more memory and processing than the proto-
cols analyzed in this paper, it was not considered.
The remainder of this paper is structured as fol-
lows. In Section 2, AM and TKN15.4 protocols are
introduced. Section 3 discusses the related works,
highlighting those that used testbeds with TinyOS.
Section 4 describes the measurement techniques, im-
plementation details of the protocols, and the experi-
mental methodology. The analysis of the results and
the conclusions are given in Sections 5 and 6, respec-
tively.
2 TinyOS PROTOCOLS
Sensor nodes are network-centric devices. Much of
their software complexity comes from network proto-
cols and their interactions. TinyOS provides a num-
ber of interfaces to abstract the underlying commu-
nications services and a number of components that
provide these interfaces. All of these interfaces and
components use a common message buffer abstrac-
tion, called “message t”, which is implemented as a
nesC struct (similar to a C struct):
t y p e d e f n x s t r u c t m e s s a g e t {
n x u i n t 8 t h e a d e r [ s i z e o f ( m e s s a g e h e a d e r t ) ] ;
n x u i n t 8 t d a t a [ TOSH DATA LENGTH ] ;
n x u i n t 8 t f o o t e r [ s i z e o f ( m e s s a g e f o o t e r t ) ] ;
n x u i n t 8 t m e t a d a t a [ s i z e o f ( m e s s a g e m e t a d a t a t ) ] ;
} m e s s a g e t ;
Some of the basic interfaces of TinyOS are de-
scribed as follows (Developers, 2013):
• Packet: Provides the basic accessors for the
message t abstract data type;
• Send: Provides the basic address-free message
sending interface;
Figure 2: Message format in AM Protocol.
• Receive: Provides the basic message reception in-
terface;
• PacketAcknowledgements: Provides mechanism
for requesting acknowledgements (ACK) on a
per-packet basis;
• RadioTimeStamping: Provides time stamping in-
formation for radio transmission and reception.
Both AM and TKN15.4 protocols use some of
these interfaces to send and receive packets, so the
following subsections evaluate the two protocols of
TinyOS.
2.1 Active Message Protocol
Since it is very common to have multiple services us-
ing the same radio to communicate, TinyOS provides
the AM layer to multiplex access to the radio.
AM packets have a field called AM TY PE (8 bits)
which determines what the rest of the packet looks
like. This term refers to the field used for multiplex-
ing, and is similar in function to the Ethernet frame
type field, IP protocol field, and UDP port in that all
of them are used to multiplex access to a communi-
cation service (Developers, 2013). Fig. 2 depicts an
example of the overall message format (ignoring the
first 00 byte), and the definition of each field is as fol-
lows:
• DA: Destination Address (2 bytes);
• LSA: Link Source Address (2 bytes);
• ML: Message length (1 byte);
• GID: Group ID (1 byte);
• AM TYPE: Active Message handler type (1
byte);
• PA: Payload (up to 28 bytes), in which ;
SM ID: Source Mote ID (2 bytes);
SC: Sample Counter (2 bytes).
As AM services, TinyOS implements AMPacket
and AMSend. The first one is similar to Packet, de-
fined in Section 2, and provides the basic AM acces-
sors for the message t abstract data type. This inter-
face provides commands for getting a node’s AM ad-
dress, and packet’s destination/type. The second one
is AMSend, which is similar to Send, and provides
the basic AM sending interface. The key difference
between AMSend and Send is that AMSend takes a
destination AM address in its send command.
Performance Evaluation of Default Active Message Layer (AM) and TKN15.4 Protocol Stack in TinyOS 2.1.2
71

The AM accessors provide the functionality for
querying packets. AM is a single-hop communication
protocol, therefore, fields such as source and destina-
tion represent the single-hop source and destination.
Multihop sources and destinations are defined by the
corresponding multihop protocol (if any). Variants of
the basic AM stack exist that incorporate lightweight,
link-level security (Levis, P. et al., 2009).
Several components implement the communica-
tions and active message interfaces, as follows
3
:
• AMReceiverC - Provides the Receive, Packet, and
AMPacket interfaces;
• AMSenderC - Provides AMSend, Packet, AM-
Packet, and PacketAcknowledgements as ACK;
• AMSnooperC - Provides Receive, Packet, and
AMPacket;
• AMSnoopingReceiverC - Provides Receive,
Packet, and AMPacket;
• ActiveMessageAddressC - Provides commands to
get and set the node’s active message address.
The basic components of programming a mote
with AM are exemplified as follows, with methods
to get the payload of a packet, to send and receive the
messages:
u s e s i n t e r f a c e P a c k e t ;
u s e s i n t e r f a c e AMSend ;
u s e s i n t e r f a c e R ec e i v e ;
. . .
Blink T o RadioMs g ∗ b t r p k t =
( Bl i nkToRad i o Msg ∗ ) ( c a l l P a c k e t . g e t P a y l o a d (& pk t ,
s i z e o f ( BlinkTo R adioMsg ) ) )
. . .
c a l l AMSend . se nd (AM BROADCAST ADDR,
&p k t , s i z e o f ( Bl i nkToRad i o Msg ) ) == SUCCESS
. . .
e v e n t m e s s a g e t ∗ R e c ei v e . r e c e i v e ( m e s s a g e t ∗ msg ,
v o i d ∗ p ay lo a d , u i n t 8 t l e n ) { . . . }
. . .
2.2 TKN15.4 Protocol
While the first steps in protocol design can often be
made with the help of analytical models and sim-
ulation, the last steps require the use of real hard-
ware, in realistic environmental conditions and ex-
perimental setups. TKN15.4 provides a stable, open-
source 802.15.4 MAC platform independent imple-
mentation for the 2.1 and later releases of TinyOS
(Hauer, 2009). It was developed by the Telecommu-
nication Networks (TKN) Group from Technical Uni-
versity Berlin on March 2009.
3
http://tinyos.stanford.edu/tinyos-wiki/ - Access
12/12/2016.
Figure 3: TKN15.4 architecture with components repre-
sented by rounded boxes, interfaces by connection lines.
The radio driver and symbol clock components are exter-
nal to TKN15.4.
2.2.1 Architecture
The architecture of TKN15.4 is depicted in Fig.
3. On the lowest level, the RadioControlP com-
ponent manages the access to the radio: with the
help of an extended TinyOS 2 arbiter component,
it controls which of the components on the level
above is allowed to access the radio at what point
in time. Most components on the second level
represent different parts of a superframe: the
BeaconTransmitP/BeaconSynchronizeP compo-
nents deals with beacons, DispatchSlottedCsmaP
manages frame communication during the CAP,
and NoCoordC f pP/NoDeviceC f pP compo-
nents are responsible for the CFP. ScanP and
PromiscuousModeP components provide services
for channel scanning and promiscuous mode, re-
spectively. Finally, the components on the top level
implement the remaining MAC data and manage-
ment services, for example, PAN association or
requesting (polling) data from a coordinator. A
component on this level typically provides a certain
MAC MLME/MCPS primitive to the next higher
layer, for example, DataP component provides the
MCPS-DATA primitive to the next higher layer to
send a frame to a peer device.
An example of programming a mote with
TKN15.4 in a beacon-enabled mode implementation
is as follows:
u s e s i n t e r f a c e MCPS DATA ;
u s e s i n t e r f a c e MLME RESET ;
u s e s i n t e r f a c e MLME GET ;
u s e s i n t e r f a c e MLME SCAN;
u s e s i n t e r f a c e MLME SYNC;
SENSORNETS 2017 - 6th International Conference on Sensor Networks
72

u s e s i n t e r f a c e MLME BEACON NOTIFY;
u s e s i n t e r f a c e IEEE154Frame a s Frame ;
u s e s i n t e r f a c e IEEE15 4BeaconFr ame a s Be a c o nFrame ;
. . .
e v e n t vo i d MLME RESET . c o n f i r m ( i e e e 1 5 4 s t a t u s t
s t a t u s ) { . . . }
. . .
e v e n t m e s s a g e t ∗ MLME BEACON NOTIFY. i n d i c a t i o n
( m e s s a g e t ∗ f ra me ) { . . . }
. . .
e v e n t vo i d MCPS DATA . co n f i r m { . . . }
2.2.2 TKN15.4 Applications
As default, in TKN15.4 implementation of TinyOS
there are 11 examples of applications to help the de-
velopers to build their own applications; six applica-
tions for beacon-enabled mode networks (TestAsso-
ciate, TestData, TestGTS, TestIndirect, TestMultihop
and TestStartSync), four for nonbeacon-enabled mode
networks (TestActiveScan, TestAssociate, TestIndi-
rectData and TestPromiscuous), and one application
that works as packet sniffer.
In this work, the application TestData for beacon-
enabled mode networks was adapted to the experi-
ment, since it is a basic application example that im-
plements direct transmissions of data from a device
to the PAN coordinator, also called sink node. In this
application, the coordinator transmits periodic bea-
cons and waits for incoming DATA frames. The other
nodes act as devices, and scan the pre-defined chan-
nel for beacons from the coordinator. Once they find a
beacon, they try to synchronize to and track all future
beacons. They then start to transmit DATA frames to
the coordinator (direct transmission in the Contention
Access Period - CAP).
As the IEEE 802.15.4 standard defines, the time
interval between two beacon frames is called the Bea-
con Interval (BI), or Superframe, and is divided into
an active period and an optional inactive period. Dur-
ing the inactive period, nodes can be kept in sleep
mode to conserve their energy. The length of the ac-
tive period is Superframe Duration (SD) and contains
16 equal length time slots (from 0 to 15). The 16 time
slots in the superframe are subdivided into smaller
slots known as the Backoff Period (BP). The active
period comprises CAP and Contention Free Period
(CFP). During CAP, nodes use the slotted CSMA/CA
algorithm to access the channel. During CFP, up to
seven Guaranteed Time Slots (GTS) can be allocated
by the coordinator for each superframe, which allow
the node to operate on the channel that is dedicated
exclusively to it. A node with an assigned GTS has
full access to the channel during its GTS. Nodes ac-
tivity during it should be completed before the start
Figure 4: Superframe Structure with BO and SO parame-
ters.
of the next GTS or the end of the CFP, as depicted in
Fig. 4.
For mesh networks when using CSMA/CA trans-
missions and duty-cycles (fraction of time that the
node is awake) lower than 100%, the delay in the
communication will be mainly dependent on the net-
work load (application traffic) and the number of hops
to the sink node (Villaverde et al., 2010).
The duty-cycle (DC) is the ratio of the length of
an active period SD to the length of a BI, and is calcu-
lated as (
1
2
)
BO−SO
. The default values defined by the
standard for both parameters are 0 ≤ SO ≤ BO ≤ 14.
The constant aBaseSlotDuration represents the num-
ber of symbols, and it has 60 symbols. Considering
each symbol is 16µs in length for the 2.4-GHz band,
it is possible to calculate the DC of the combination
BO × SO. If BO = 5 and SO = 5 (TKN15.4 default
values), the DC is calculated as follows:
• aBaseSlotDuration = 60 symbols;
• aBaseSuper f rameDuration = 60 symbols × 16µs
= 960µs;
• BI = 960 × 2
5
symbols = 491520µs (≈ 491ms);
• SD = 960 × 2
5
symbols = 491520µs (≈ 491ms);
• DC =
SD
BI
= 1;
This implementation has a DC of 100% with ac-
tive and inactive periods (SD) of 0.491s and BI of
0.491s. In this example, the PAN coordinator will
generate around 2 beacons/second (1000/491BI ≈ 2).
During each BI, the devices work for about 491ms
(SD) and would keep quit for the rest of time, if there
was any in this case. If SO was defined as 0, for ex-
ample, it would minimize the ON time for the device
during the CAP. If it were increased, it would allow
more packets to be transferred during the CAP at the
expense of higher power consumption
Due to non-deterministic nature of CSMA/CA
transmissions, an exact calculation of delay cannot be
provided nor can specific delay limitations be guaran-
teed (Carballido Villaverde et al., 2012). To guarantee
specific delay requirements, the network parameters
Performance Evaluation of Default Active Message Layer (AM) and TKN15.4 Protocol Stack in TinyOS 2.1.2
73

cannot be selected randomly. Therefore, before com-
paring AM (does not use IEEE 802.15.4 MAC) and
TKN15.4 protocols, this paper provides a delay anal-
ysis with regard to different MAC layer parameters so
the best configuration of those can be selected.
Several works have been done in literature in or-
der to study the behavior of the protocol when con-
sidering DC configuration, and how this configuration
affects the performance of the network. Usually, the
analysis is evaluated by using simulation tools; some
of the works performed experiments using real de-
vices, as in (Despaux et al., 2013). Since the parame-
ters are dependent on the packet rate and the environ-
ment, in order to have more packets received and to
be energy-efficient at the same time, this analysis is
important to be done before each implementation.
3 RELATED WORK
The related works presented in this Section are classi-
fied based on experiments performed with one of the
two protocols related in this paper.
In (dos Santos et al., 2014), the authors performed
experiments with TinyOS using a MicaZ platform.
They proposed a localized algorithm to enable detec-
tion, localization and extent determination of damage
sites using the resource constrained environment of a
WSN. The data collection stage starts at a given time,
as requested by the sink node. A message is sent from
the sink to the cluster managers, and those are re-
sponsible for sending messages to schedule the next
sensing task on their subordinated sensors. For their
paper, the default implementations of 802.15.4 proto-
col for lower level communication handling, and AM
protocol for higher-level communication handling in
TinyOS 2.1 were used. The reason for this choice was
that they wanted a lean implementation of the whole
system in their prototype.
In (Ouadjaout et al., 2014), the authors present a
low cost and energy efficient wireless sensor mote
platform for low data rate monitoring applications,
called DZ50. This platform is based on ATmega328P
micro-controller and RFM12b transceiver, and is
compared with MicaZ and TelosB platforms. They
ported all device drivers of DZ50 to TinyOS 2.x,
which eases the programming of the platform and
allows using many protocols already developed for
TinyOS platform. As well as the previous paper, this
one used AM to transmit and receive packets via an
abstract interface.
In (Willig et al., 2010), the authors study pas-
sive discovery of IEEE 802.15.4 networks operating
in beacon-enabled mode. To validate their analytical
model, they performed experimental evaluations with
an implementation on Tmote Sky using TKN15.4
protocol.
The work in (Carballido Villaverde et al., 2012)
presents the InRout route selection algorithm, where
local information is shared among neighboring nodes
to enable efficient, distributed route selection while
satisfying industrial application requirements and
considering sensor node resource limitations. They
used data frames sizes of 127 bytes, which is the max-
imum possible size in IEEE 802.15.4 networks. Since
the sensor nodes have strict memory limitations, the
buffer size at MAC layer for all nodes is restricted
to 10 packets. A buffer size of 10 packets is cho-
sen based on the default buffer size used in the IEEE
802.15.4 MAC standard implementation for TinyOS-
2.x TKN15.4.
In (Macbeth and Sarrafzadeh, 2009), the authors
evaluate the performance of a Listen-and-Suppress
Carrier Sense Multiple Access (LAS-CSMA) scheme
in order to reduce power consumption, network band-
width usage and delays by suppressing node unnec-
essary packet transmissions. The scheme is evalu-
ated with IRIS and MicaZ platforms, and AM pro-
tocol. The authors argue that AM allows for the over-
lap and integration of communication and computa-
tion, which is indispensable for efficient in-network
data aggregation in sensor networks. In addition, it
also allows multiple applications to use communica-
tion resources simultaneously.
In (Paczesny et al., 2012), it is presented the con-
cept, design, and implementation of the proxy mote,
a Linux-based TinyOS platform able to execute a
TinyOS applications, called ProxyMotes. The main
use case for the proxy mote is to expose a non-TinyOS
(legacy) sensor/actuator device to TinyOS applica-
tions. To evaluate the proxy network, the authors used
the Oscilloscope application a TinyOS demo, which
generates AM packets to create the traffic.
The authors in (Dalton et al., 2009) presented a
visualization toolkit for TinyOS 2.0 to aid in program
comprehension. To make the concepts more concrete,
they considered a variant of the Blink application in-
cluded as part of TinyOS distribution, which uses AM
protocol.
In (Shnayder et al., 2004), it is presented the Pow-
erTOSSIM, a scalable simulation environment for
WSN that provides an accurate, per-node estimate of
power consumption. For the experiments, the authors
used Mica2 sensor node and oscilloscope, and used
AM protocol.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
74
4 METHODOLOGY
In order to compare AM and TKN15.4 protocols’
scalability, quantitative metrics are used to measure
and evaluate the performance of both protocols. For
all metrics, the average over multiple experiments is
determined. The set of performance metrics used for
comparing the selected protocols of this work can be
described briefly as follows (Hac, 2003):
• Packet generation rate: it is the number of pack-
ets that the sensor node transmits in one period,
which is usually one second.
• Network throughput: the end-to-end network
throughput measures the number of packets per
second received at the destination. It is considered
here as an external measure of the effectiveness of
a protocol;
• Network delay: it measures the average end-to-
end delay of data packet transmission. This delay
implies the average time taken between a packet
initially sent by the source, and the time for suc-
cessfully receiving the message at the destination.
This measure takes into account the queuing and
the propagation delay of the packets;
• Success rate: it is the total amount of packets re-
ceived at the destinations verses the total number
of packets sent from the source;
• Energy consumption: it is the energy consumed
by a node in the network in which the periods of
transmission, reception, and idling are taken into
account. Assuming each transmission consumes
an energy unit, the total consumption is equivalent
to the total number of packets sent in the network.
Note that there are many factors influencing the
overall energy consumption, and the results pre-
sented in this paper should only be regarded as in-
dicative for what is possible to achieve in systems
with similar hardware.
In this work, seven nodes were used in a star topol-
ogy, working on channel 26 (2.480GHz) and with -
20dBm of transmission power. In TKN15.4, one node
plays the coordinator role, and the others play the de-
vice role. In both protocols, the devices send two
packets per second, and all the end nodes send pack-
ets at the same time in order to analyze the Network
throughput, Success rate, and the Network delay
metrics.
The sink node is connected to a USB port of the
computer to forward the packet information (payload)
to it, and the devices are set to send 2000 packets to
their coordinators without ACK. It is important to no-
tice that interference occurs in the laboratory, since
the nodes are working on 2.4 GHz frequency, and
the laboratory receives the signal of seven Wi-Fi net-
works.
For both protocols, the application tasks were the
same, just changing the parameters of sending the
packets. The TKN15.4 application in this work was
developed with beacons enabled, so before sending
the packets, the nodes need to synchronize with their
coordinator. The beacon packets were not consid-
ered in the Network throughput, Success rate, and
Network delay metrics, since AM does not use bea-
cons to communicate with its sink node. However,
the beacon packets were evaluated in the Energy
consumption metric.
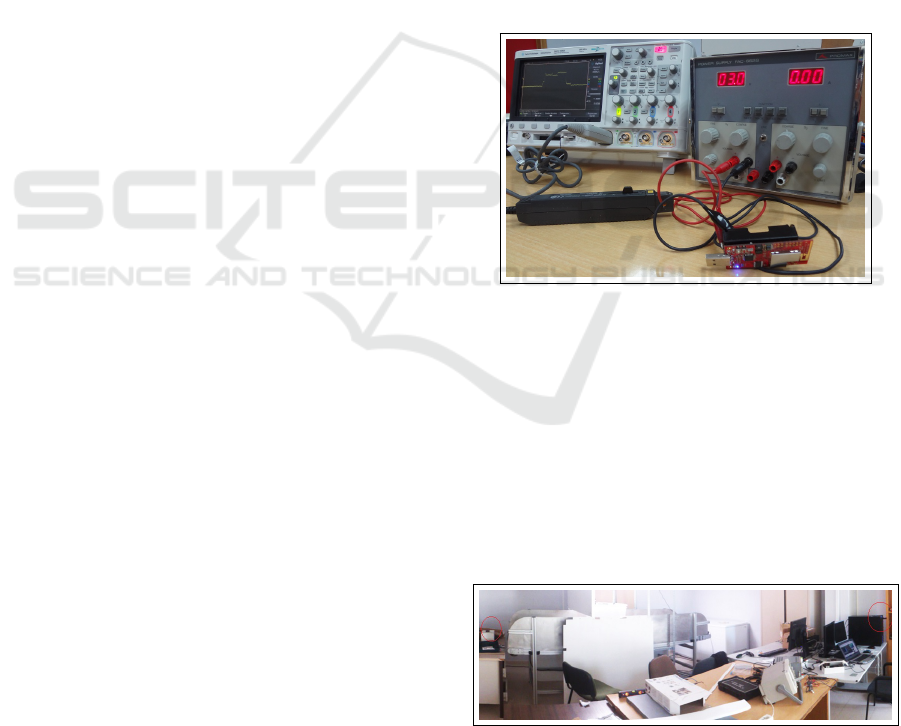
In order to measure the power consumed by the
devices, a power supply and an oscilloscope were
used, as depicted in Fig. 5, where a loop is used to
measure the current and shows its shape in the oscil-
loscope.
Figure 5: Measurement set-up: Power supply and oscillo-
scope connected to the transmitter.
The environment where the experiments were per-
formed is as depicted in Fig. 6. It is a laboratory
with around 43m
2
with some metal objects and peo-
ple moving around. The nodes were put in random
location, some of them with line of sight (LOS), and
some without LOS. In Fig. 6, one sender and the re-
ceiver (coordinator) nodes are in the extremes right
and left of the picture as an example without LOS.
There were performed eight replications for each pro-
tocol.
Figure 6: Environment where the experiments were per-
formed.
As stated before, in order to define the best param-
eters to achieve low power consumption for ZigBee
Performance Evaluation of Default Active Message Layer (AM) and TKN15.4 Protocol Stack in TinyOS 2.1.2
75

devices, there were stablished varying values for BO
and SO, and the values adopted were used to com-
pare TKN15.4 and AM protocols. For each value,
four replications were performed, and the results are
in Tab. 1.
Table 1: Percentage of packets received by changing BO
and SO parameters.
P
P
P
P
P
P
P
SO
BO
4 5 6 7
2 58 41 N N
3 70 48 N N
4 82 61 N N
5 X 92 61 N
6 X X 91 59
7 X X X 83
In this table, it is shown the percentage of packets
received in different values of BO and SO. For each
one, four replications were performed. The values of
X were not used in the experiments because of the
limitation in IEEE 802.15.4 standard, as discussed in
Section 2.2.2 (SO ≤ BO). Since the duty-cycle in N
values of the table leads to a decrease in the number
of packets received, as can be seen in BO = 4/SO = 2,
BO = 5/SO = 2, and BO = 5/SO = 3, they were not
analyzed in this work. Such values of packet recep-
tion are not acceptable. In this table, the best values
of packet reception are using BO = 5/SO = 5 and
BO = 6/S O = 6, and had almost the same results.
Since in BO = 6/SO = 6, BI lasts more than in BO =
5/SO = 5, it spends more energy, so BO = 5/SO = 5
parameters were used to compare TKM15.4 and AM
protocols.
5 RESULTS
Regarding the first metric to evaluate the performance
of both protocols, Packet generation rate, this value
was set to two packets per second. It takes 1000 sec-
onds (nearly 17 minutes) to send 2000 packets. In
TKN15.4, the beacon time synchronization was not
considered, which lasts around 491ms for BI = 5, and
around 983ms for BI = 6.
Each node is set to send 2 packets/s, i.e., the net-
work sends 12 packets to the sink node. The sink node
could not process correctly all packets that were re-
ceived when the transmission rate was more than two
packets per second for each of the six nodes, so this
rate was adequate for the amount of packets to be pro-
cessed and forwarded to the computer. With this con-
figuration, the metric Networ k T hroughput results in
an average of 11 packets per second received/pro-
cessed by the sink in AM protocol. This result can be
explained because AM is a very simple protocol, and
it cannot deal with so much packets at the same time.
Only TRUE or FALSE attribute is used as congestion
control method to determine if the sink is busy with
processing of other packet. If so, the next packet will
be discarded. Concerning TKN15.4, a device must
sense an idle channel twice before it may transmit, as
explained in Section 2.2.1, so the control is more or-
ganized and therefore the sink node will process more
packets.
Regarding the Network delay metric, for each
replication, each node was analyzed considering the
time when it sends one packet, and the time when the
packet is received by the sink. For all the packets re-
ceived by the sink, for each sender, it was calculated
the average time from sending to receiving tasks, and
for AM protocol, the average value was 488.25ms.
That is, the first packet from ”Sender 1” was sent at
0ms; after 488.25ms, this packet was received by the
sink; 11.75ms after that, the second packet was sent
by ”Sender 1”, and then this packet was received by
the sink at 988.25ms, and so on. Almost the same re-
sults were obtained by TKN15.4 protocol that lasted
488.2ms to send a packet, and this one to be received
by the sink node.
Concerning the energy of TKN15.4, besides data
packet transmitted, it must be considered the beacons
received from the coordinator. Fig. 8 depicts one
beacon received by the node. After receiving it, the
node waits 491ms (BI) to receive the next one. The
process of sending all packets lasts 1000000ms, and
each packet is sent every 500ms, as depicted in Fig. 7.
Without considering the first milliseconds of beacon
packets for synchronizing, which is performed once,
when the button is pushed to start, the node begins to
send packets, and the time is started. After the first
packet sent, the first beacon is received from the co-
ordinator.
Depicted in Fig. 8, the energy consumption of one
single beacon is shown, which results in about 0.023
Joules. Fig. 9 depicts the amount of energy of a sin-
gle data packet, which consumes around 0.026 Joules.
Depending on the platform, these results might be
slightly different, even if the same application is used.
In other periods than the packet interval, the node en-
ters in a CPU Power-Save mode, therefore this time
interval was not considered in the consumption, as
it can be neglected compared to the main consump-
tion. In 1000000ms, the node received around 2036
beacons, resulting in a total of 48 Joules of energy
consumption for the beacon packets. The amount of
data packets during all the experiment results in a con-
sumption of 52 Joules. The result for TKN15.4 pack-
SENSORNETS 2017 - 6th International Conference on Sensor Networks
76
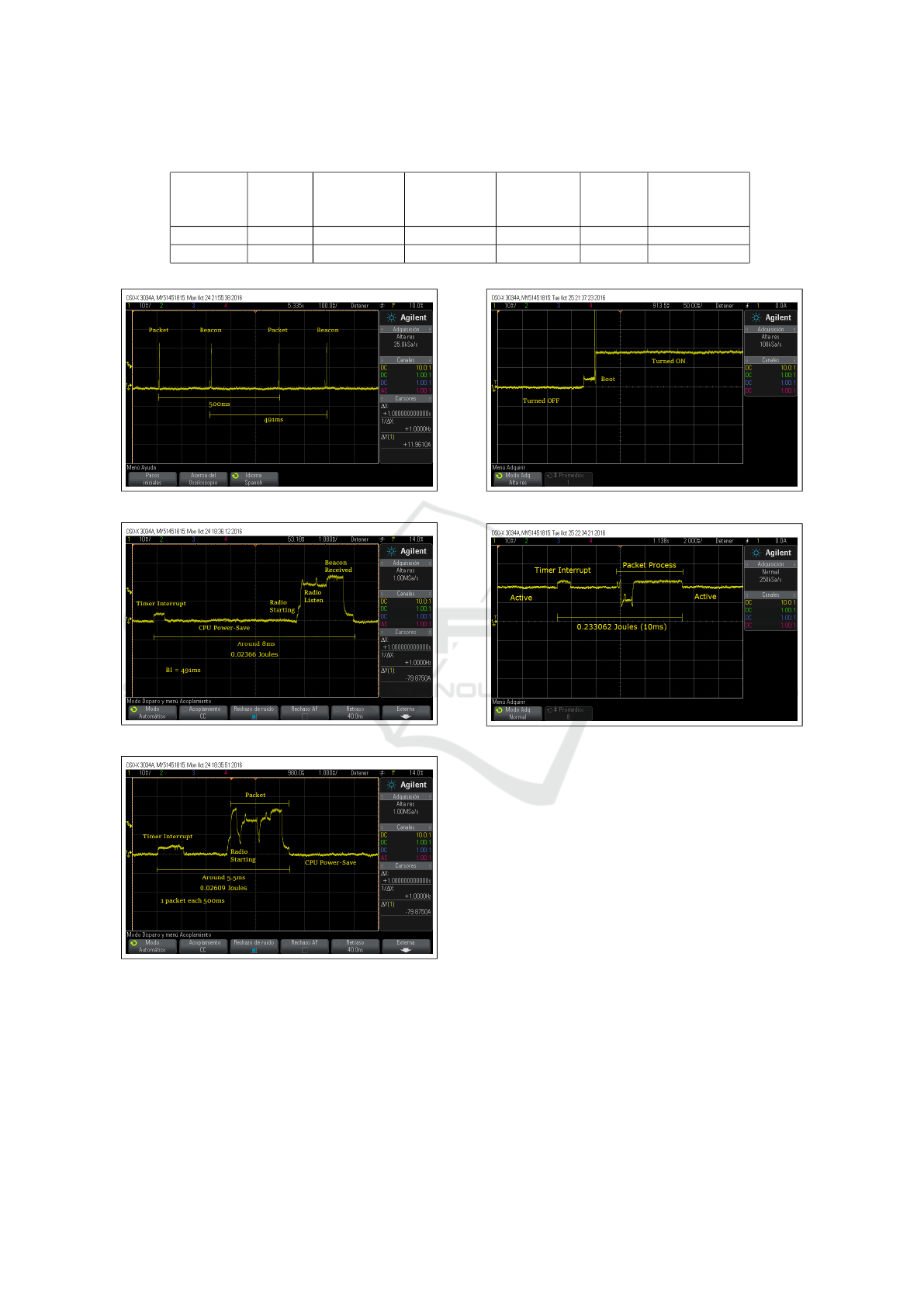
Table 2: Performance evaluation with metrics.
Metrics /
Protocols
Packets
sent
Packet Rate
(pkts/s)
Network
Throughput
(pkts/s)
Network
delay (ms)
Success
Rate
(%)
Energy
Consumption
(Joules)
AM 2000 2 11 488.25 90.7 486
TKN15.4 2000 2 12 488.2 94.8 100
Figure 7: Beacon and Packet traces.
Figure 8: Characteristic of Beacon Packets.
Figure 9: Characteristic of TKN15.4 packets.
ets is around 100 Joules, as illustrated in Tab. 2.
Regarding AM protocol, as seen in Fig. 10 and
Fig. 11, it does not implement CPU Power-Save
mode, i.e., the node remains active all the time, with
around 18mA (54mW), even without receiving or
transmitting any packet. Fig. 10 depicts the mo-
ment when the node is restarted, and Fig. 11 shows
Figure 10: Restart of AM Protocol.
Figure 11: Characteristic of AM Packet.
the packet transmission. The time from processing
and sending the packet in AM protocol lasts around
10ms and consumes 0.233 Joules for each packet
(466 Joules for 2000 packets, 20000ms). Considering
that the node sends packet almost immediately after
restarting, and the processing of packet lasts around
10ms, the period that the node does nothing in the
interval between two packets is 490ms, resulting in
500ms for each packet sent. During the 2000 packets
sent, the interval when the nodes does nothing (but
remains in active) is 980000ms, which corresponds
to around 20 Joules. Adding the consumption of ac-
tive period, and packet processing, the total consump-
tion is around 486 Joules, almost five times more than
TKN15.4 during 16.7 minutes.
The most important differences of the measure-
ment set-up regard the Success rate and Energy
consumption. It is worthy to note that TKN15.4 pro-
tocol shows a higher success rate than AM protocol,
and has much less energy consumption than AM Pro-
Performance Evaluation of Default Active Message Layer (AM) and TKN15.4 Protocol Stack in TinyOS 2.1.2
77

tocol. Therefore, AM protocol is not appropriate to
monitor environments with restriction of energy and
large amount of data.
6 CONCLUSIONS
This paper presented a performance evaluation of two
protocols developed for TinyOS for communication
in WSNs. AM protocol is simpler than TKN15.4 and
allows multiple services using the same radio to com-
municate. TKN15.4 protocol uses the IEEE 802.15.4
standard and uses CSMA/CA to reduce collisions. It
has several applications, and in the case of this pa-
per, the application with beacon-enabled mode was
used and compared to AM protocol regarding net-
work throughput, network delay, success rate, and en-
ergy consumption.
Although simpler and allowing multiple services,
AM has several drawbacks. The only congestion con-
trol method used is a variable that indicates if the sink
node is busy. It also consumes much more energy, al-
though in this work the duty-cycle used in TKN15.4
was 100%. TKN15.4 is better in energy consump-
tion and success rate, since it uses CSMA/CA to con-
trol the access. These are two decisive parameters for
choosing TKN15.4. Maybe with more nodes and dur-
ing more time, the results would become even more
differentiated. The positive point of AM is that it
allows multiple services using the same radio, but
causes an excessive energy consumption.
However, when considering stringent require-
ments on reliability and predictable real-time perfor-
mance, TKN15.4 (IEEE 802.15.4) is not considered
a good choice because of its several limitations, al-
ready highlighted by many studies, such as in (Anas-
tasi et al., 2011). As main limitations of IEEE
802.15.4 (De Guglielmo et al., 2016), are inefficiency
of slotted CSMA/CA in beacon-enabled mode, and
in nonbeacon-enabled mode for a large number of
nodes transmitting at the same time, and no protec-
tion against interference/fading.
Ongoing work extends this one to address the de-
velopment of IEEE 802.15.4e standard in TinyOS,
specifically the DSME (Deterministic and Syn-
chronous Multi-Channel Extension) behavior mode.
The choice for this mode is because there is al-
ready a small public project of IEEE 802.15.4e TSCH
(Time-Slotted Channel Hopping) behavior mode in
development called TKN-TSCH
4
. The implementa-
tion of DSME in TinyOS will improve the old stan-
dard of TKN15.4 by introducing mechanisms such
4
https://github.com/tinyos/tinyos-main/pull/361 - Access
13/12/2016.
as time slotted access, multichannel communications
and channel hopping. Differently from the other be-
havior modes, DSME remains using the CAP and
CFP methods of channel access derived from IEEE
802.15.4, which eases its implementation. There are
other implementations of IEEE 802.15.4e (TSCH be-
havior mode) in OpenWSN
5
and Contiki
6
.
ACKNOWLEDGEMENTS
The authors would like to thank the support of the
Institute for Advanced Studies in Communications
(Iecom), the Brazilian Council for Research and De-
velopment (CNPq), the Coordination for the Improve-
ment of Higher Education Personnel (CAPES), and
the SMART 2 Project of the Erasmus Mundus Pro-
gramme.
REFERENCES
Agrawal, P., Ahlen, A., Olofsson, T., and Gidlund, M.
(2014). Characterization of long term channel vari-
ations in industrial wireless sensor networks. In IEEE
International Conference on Communications, pages
1–6.
Amjad, M., Sharif, M., Afzal, M. K., and Kim, S. W.
(2016). TinyOS - New Trends, Comparative Views,
and Supported Sensing Applications: A Review. IEEE
Sensors Journal, 16(9):2865–2889.
Anastasi, G., Conti, M., and Di Francesco, M. (2011).
A Comprehensive Analysis of the MAC Unreliabil-
ity Problem in IEEE 802.15.4 Wireless Sensor Net-
works. IEEE Transactions on Industrial Informatics,
7(1):52–65.
Carballido Villaverde, B., Rea, S., and Pesch, D. (2012).
InRout A QoS aware route selection algorithm for in-
dustrial wireless sensor networks. Ad Hoc Networks,
10(3):458–478.
Dalton, A. R., Wahba, S. K., Dandamudi, S., and Hallstrom,
J. O. (2009). Visualizing the runtime behavior of em-
bedded network systems: A toolkit for TinyOS. Sci-
ence of Computer Programming, 74(7):446–469.
De Guglielmo, D., Brienza, S., and Anastasi, G. (2016).
{IEEE} 802.15.4e: A survey. Computer Communica-
tions, 88:1–24.
Despaux, F., Song, Y.-Q., and Lahmadi, A. (2013).
Measurement-based Analysis of the Effect of Duty
Cycle in IEEE 802.15.4 MAC Performance. In 2013
IEEE 10th International Conference on Mobile Ad-
Hoc and Sensor Systems, pages 620–626. IEEE.
Developers, T. (2013). Official tinyos documentation wiki.
http://tinyos.stanford.edu/tinyos-wiki.
5
http://openwsn.atlassian.net/wiki - Access 09/12/2016.
6
https://github.com/contiki-os - Access 09/12/2016.
SENSORNETS 2017 - 6th International Conference on Sensor Networks
78

dos Santos, I. L., Pirmez, L., Lemos,
´
E. T., Delicato, F. C.,
Vaz Pinto, L. A., de Souza, J. N., and Zomaya, A. Y.
(2014). A localized algorithm for Structural Health
Monitoring using wireless sensor networks. Informa-
tion Fusion, 15:114–129.
Gomes, R. D. et al. (2016). Evaluation of link quality es-
timators for industrial wireless sensor networks. In
XXXIV Simposio Brasileiro de Telecomunicacoes e
Processamento de Sinais, pages 1–5.
Hac, A. (2003). Wireless Sensor Network Designs.
Handziski, V., Polastre, J., Hauer, J., Sharp, C., Wolisz, A.,
and Culler, D. (2005). Flexible hardware abstraction
for wireless sensor networks. In Proceeedings of the
Second European Workshop on Wireless Sensor Net-
works., pages 145–157. IEEE.
Hauer, J.-H. (2009). Tkn15.4: An ieee 802.15.4 mac. im-
plementation for tinyos 2. Technical report, Technical
University Berlin.
Hill, Jason, and David Culler (2002). A wireless embed-
ded sensor architecture for system-level optimization.
Technical report, UC Berkeley.
Levis, P. et al. (2009). Tinyos: An operating system for
sensor networks. In Ambient Intelligence, W. Weber,
J. Rabaey, and E. Aarts (Eds.). Springer-Verlag.
Macbeth, J. and Sarrafzadeh, M. (2009). Press the Can-
cel Button! A Performance Evaluation of Scalable
In-Network Data Aggregation. In 2009 International
Conference on Information and Multimedia Technol-
ogy, pages 449–457. IEEE.
Ouadjaout, A., Lasla, N., Bagaa, M., Doudou, M., Zi-
zoua, C., Kafi, M. A., Derhab, A., Djenouri, D., and
Badache, N. (2014). DZ50: Energy-efficient Wire-
less Sensor Mote Platform for Low Data Rate Appli-
cations. Procedia Computer Science, 37:189–195.
Paczesny, T., Tajmajer, T., Domaszewicz, J., and
Pruszkowski, A. (2012). ProxyMotes: Linux-based
TinyOS Platform for Non-TinyOS Sensors and Actu-
ators. In 2012 IEEE 10th International Symposium
on Parallel and Distributed Processing with Applica-
tions, pages 255–261. IEEE.
Shnayder, V., Hempstead, M., Chen, B.-r., Allen, G. W., and
Welsh, M. (2004). Simulating the power consumption
of large-scale sensor network applications. In Pro-
ceedings of the 2nd international conference on Em-
bedded networked sensor systems - SenSys ’04, page
188. ACM Press.
Villaverde, B. C., Alberola, R. D. P., Rea, S., and Pesch, D.
(2010). Experimental Evaluation of Beacon Schedul-
ing Mechanisms for Multihop IEEE 802.15.4 Wire-
less Sensor Networks. In 2010 Fourth International
Conference on Sensor Technologies and Applications,
pages 226–231. IEEE.
Wang, Q. and Balasingham, I. (2010). Wireless Sensor
Networks - An Introduction. In Wireless Sensor Net-
works: Application-Centric Design. InTech.
Willig, A., Karowski, N., and Hauer, J.-H. (2010). Pas-
sive discovery of IEEE 802.15.4-based body sensor
networks. Ad Hoc Networks, 8(7):742–754.
Performance Evaluation of Default Active Message Layer (AM) and TKN15.4 Protocol Stack in TinyOS 2.1.2
79
