
On a Traveling Salesman based Bilevel Programming Problem
Pablo Adasme
1
, Rafael Andrade
2
, Janny Leung
3
and Abdel Lisser
4
1
Departamento de Ingenier´ıa El´ectrica, Universidad de Santiago de Chile, Avenida Ecuador 3519, Santiago, Chile
2
Departamento de Estat´ıstica e Matem´atica Aplicada, Universidade Federal do Cear´a,
Campus do Pici, BL 910, CEP 60.455-760, Fortaleza, Cear´a, Brazil
3
Department of Systems Engineering & Engineering Management, Chinese University of Hong Kong,
Shatin, Hong Kong, China
4
Laboratoire de Recherche en Informatique, Universit´e de Paris-Sud 11, Bˆat. 650 Ada Lovelace, Paris, France
Keywords:
Bilevel Programming, Traveling Salesman Problem, Mixed Integer Linear Programming Formulations,
Iterative Sub-tour Elimination Constraint Procedure.
Abstract:
In this paper, we consider a linear bilevel programming problem where both the leader and the follower
maximize their profits subject to budget constraints. Additionally, we impose a Hamiltonian cycle topology
constraint in the leader problem. In particular, models of this type can be motivated by telecommunication
companies when dealing with traffic network flows from one server to another one within a ring topology
framework. We transform the bilevel programming problem into an equivalent single level optimization prob-
lem that we further linearize in order to derive mixed integer linear programming (MILP) formulations. This
is achieved by replacing the follower problem with the equivalent Karush Kuhn Tucker conditions and with
a linearization approach to deal with the complementarity constraints. The topology constraint is handled by
the means of two compact formulations and an exponential one from the classic traveling salesman problem.
Thus, we compute optimal solutions and upper bounds with linear programs. One of the compact models
allows to solve instances with up to 250 nodes to optimality. Finally, we propose an iterative procedure that
allows to compute optimal solutions in remarkably less computational effort when compared to the compact
models.
1 INTRODUCTION
Bilevel programming is a two level hierarchical opti-
mization framework where the upper level problem is
referred to as the leader whilst the lower level problem
is referred to as the follower problem. In a bilevel pro-
gramming problem (BPP), we aim to find an optimal
point such that the leader and the follower maximize
(or minimize) their respectiveobjectivefunctionssub-
ject to linking constraints. Applications concerning
BPPs arise in agriculture, economic systems, finance,
engineering, banking, transportation, network design,
management and planning to name a few. For a more
general description of BPP applications and algorith-
mic approaches to solve these problems see for in-
stance (Dempe, 2003; Floudas and Pardalos, 2001;
Migdalas et al., 1997; Thirwani and Arora, 1998; Vi-
cente et al., 1994; Wang et al., 1994).
In this paper, we consider a linear bilevel pro-
gramming problem (LBPP) where both the leader and
the follower maximize their profits subject to bud-
get constraints. Additionally, we impose a Hamilto-
nian cycle topology constraint in the leader problem.
In particular, models of this type can be motivated
by telecommunication companies when dealing with
traffic network flows from one server to another one
within a ring topology framework. As an example,
consider the problem of flow traffic management in
a backbone wireless token ring network where users
connect to any node and pass their messages trough
the ring in order to reach another user which is also
connected to a node in the ring (Lee et al., 2001; Song
and Yang, 1997). In these types of networks, the traf-
fic flows can be significantly large which might re-
quire more than one network operator to deal with the
flow problem.
We transform the LBPP into an equivalent sin-
gle level optimization problem that we further lin-
earize in order to derive mixed integer linear pro-
gramming (MILP) formulations. This is achieved
by replacing the follower problem with the equiva-
lent Karush Kuhn Tucker (KKT) conditions and with
Adasme P., Andrade R., Leung J. and Lisser A.
On a Traveling Salesman based Bilevel Programming Problem.
DOI: 10.5220/0006190503290336
In Proceedings of the 6th International Conference on Operations Research and Enterprise Systems (ICORES 2017), pages 329-336
ISBN: 978-989-758-218-9
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
329

the linearization approach proposed in (Audet et al.,
1997) to deal with the complementarity slackness
conditions. The topology constraint is handled by the
means of two compact polynomial formulations and
an exponential one from the classic traveling sales-
man problem (TSP) (Gavish and Graves, 1978; Letch-
ford et al., 2013; Miller et al., 1960). Thus, we
compute optimal solutions and upper bounds with the
MILP and linear programming (LP) relaxations, re-
spectively.
Our contribution in this paper is not theoretical,
but mainly focussed on computational numerical re-
sults on a novel problem in the domain of bilevel pro-
graming. As far as we know, LBPPs including Hamil-
tonian cycle topology constraints have not been con-
sidered in the literature so far. We compare numeri-
cally the exponential model with the two compact for-
mulations for randomly generated instances. For this
purpose, first we solve the exponential model by gen-
erating all cycle elimination constraints and then, by
using an iterative algorithmic procedure which con-
sists of adding violated cycle elimination constraints
within each iteration until no cycle is found in the cur-
rent solution. Finally, we further propose a relaxed
version of the iterative algorithm and compute tight
upper bounds as well. Our main numerical result is
to show that solving the exponential model with the
iterative procedure is by far more convenient than us-
ing the compact formulations which are more theoret-
ical based approaches. In fact, we solve to optimal-
ity instances with up to 250 nodes so far, in less than
70 seconds in average compared to the higher CPU
times required by the compact formulations. It has
been proved that BPPs are strongly NP-hard even for
the simplest case in which all the involved functions
are affine. See for instance (Migdalas et al., 1997;
Scholtes, 2004). The reader is referred to the books
(Dempe, 2002; Migdalas et al., 1997) for a more gen-
eral understanding on bilevel programming.
The remaining of the paper is organized as fol-
lows. In section 2, first we present and explain the
LBPP problem. Then, we discuss three equivalent
MILP models while using the exponential and the
two compact formulations. Subsequently, in sec-
tion 3, we present the alternative iterative procedures
which allow to obtain optimal solutions and tight up-
per bounds using the exponential model. Afterwards,
in section 4 we compare all the proposed models and
the iterative procedures with the optimal solution of
the problem. Finally, in section 5 we give the main
conclusions of the paper and provide some insight for
future research.
2 LINEAR BILEVEL AND MILP
MODELS
In this section, we present and explain the LBPP. In
particular, we use an exponential number of sub-tour
elimination constraints (SECs) to characterize the
Hamiltonian cycle condition in the leader problem.
Subsequently, we use two additional compact mod-
eling approaches from the traveling salesman prob-
lem (Gavish and Graves, 1978; Letchford et al., 2013;
Miller et al., 1960) and obtain equivalent MILP mod-
els. Let G(V, E) denote a complete graph with set of
nodes V and set of directed arcs E. Our LBPP can be
formulated as follows
BP
1
: max
{ f,g,x}
(
∑
ij∈E
C
ij
f
ij
+
∑
ij∈E
D
ij
g
ij
)
(1)
s.t.
∑
j:i j∈E
A
ij
f
ij
+
∑
j:i j∈E
B
ij
g
ij
≤ c, ∀i ∈ V (2)
f
ij
+ g
ij
≤ Mx
ij
, ∀ij ∈ E (3)
∑
j:i j∈E
x
ij
= 1, ∀i ∈ V (4)
∑
j: ji∈E
x
ji
= 1, ∀i ∈ V (5)
∑
ij∈E(S)
x
ij
≤ |S| − 1, ∀S ⊂ V (6)
x
ij
∈ {0, 1}, f
ij
≥ 0, ∀ij ∈ E (7)
g ∈ argmax
{g}
(
∑
ij∈E
H
ij
g
ij
+
∑
ij∈E
P
ij
f
ij
)
(8)
∑
j:i j∈E
Q
ij
f
ij
+
∑
j:i j∈E
R
ij
g
ij
≤ r,
∀i ∈ V (9)
g
ij
≥ 0, ∀ij ∈ E (10)
In BP
1
, the input symmetric matrices
{C, D, A, B, H, P, Q, R} ∈ M
|V|×|V|
(R
+
) and the
scalars {c, r} ∈ R
+
, respectively. Constraints (1)-(7)
correspond to the leader problem whereas constraints
(8)-(10) represent the follower problem. Without loss
of generality, we assume that the set V represents
servers to visit whereas the set E represents traffic
links by which the network flow service should be
carried out from one server to another. Thus, the bi-
nary decision variable x
ij
= 1 if and only if the leader
company decides to use the link (i, j) and x
ij
= 0
otherwise, ∀ij ∈ E. Similarly, the decision variables
f
ij
, g
ij
≥ 0 represent the amount of network flow to
transport from i to j for the leader and follower prob-
lems, respectively. The objective functions maximize
the profits for both the leader and the follower and
are given in (1) and (8), respectively. Whereas the
constraints (2) and (9) represent the costs structure
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
330

associated to each one of them. Constraints (7) and
(10) are domain constraints for the decision variables.
The constraints (3)-(6) characterize the Hamiltonian
cycle condition imposed in the leader problem. In
particular, the constraint (3) implies that whenever
the variable x
ij
= 0, then the variables f
ij
and g
ij
must
be equal to zero ∀ij ∈ E. For this purpose, we use a
large positive BigM value denoted by M. Constraints
(4)-(5) enforce the condition that each node should
be connected to two nodes in the circuit. Finally,
constraint (6) represents SECs ∀S ⊂ V. Notice that
we do not include SECs for S ≡ V in order to allow
obtaining feasible solutions, i.e., Hamiltonian cycles.
An equivalent MILP model can be straightfor-
wardly obtained by replacing the follower problem
with the equivalent KKT conditions and by using
the linearization approach proposed in (Audet et al.,
1997) to deal with the complementarity slackness
conditions (Audet et al., 1997; Dempe, 2003). This
leads to the following equivalent MILP model
MIP
1
: max
{ f,g,x,λ,µ,θ,ν}
(
∑
ij∈E
C
ij
f
ij
+
∑
ij∈E
D
ij
g
ij
)
s.t.
∑
j:i j∈E
A
ij
f
ij
+
∑
j:i j∈E
B
ij
g
ij
≤ c, ∀i ∈ V
f
ij
+ g
ij
≤ Mx
ij
, ∀ij ∈ E
∑
j:i j∈E
x
ij
= 1, ∀i ∈ V
∑
j: ji∈E
x
ji
= 1, ∀i ∈ V
∑
ij∈E(S)
x
ij
≤ |S| − 1, ∀S ⊂ V (11)
x
ij
∈ {0, 1}, f
ij
≥ 0, ∀ij ∈ E
H
ij
− λ
i
R
ij
+ µ
ij
= 0, ∀ij ∈ E (12)
∑
j:i j∈E
Q
ij
f
ij
+
∑
j:i j∈E
R
ij
g
ij
≤ r, ∀i ∈ V (13)
r−
∑
j:i j∈E
Q
ij
f
ij
−
∑
j:i j∈E
R
ij
g
ij
+ ν
i
L ≤ L,
∀i ∈ V (14)
λ
i
≤ ν
i
L, ∀i ∈ V (15)
µ
ij
+ θ
ij
L ≤ L, ∀ij ∈ E (16)
g
ij
≤ θ
ij
L, ∀ij ∈ E (17)
g
ij
, µ
ij
≥ 0∀ij ∈ E, λ
i
≥ 0∀i ∈ V (18)
ν
i
∈ {0, 1}∀i ∈ V, θ
ij
∈ {0, 1}∀ij ∈ E (19)
where the constraints (12) are due to the derivatives
obtained with the Lagrangian function of the follower
problem and with respect to the variables g
ij
, ∀ij ∈ E.
The non-negative variables λ
i
, ∀i ∈ V and µ
ij
, ∀ij ∈ E
are dual variables for the constraints (9) and (10), re-
spectively. The constraints (13)-(15) enforce the con-
dition that either
r−
∑
j:i j∈E
Q
ij
f
ij
−
∑
j:i j∈E
R
ij
g
ij
or λ
i
should be equal to zero ∀i ∈ V. This is handled
with the binary variable ν
i
∀i ∈ V and with the large
positive value L. Similarly, the constraints (16)-(17)
enforce the condition that either µ
ij
or g
ij
should be
equal to zero for all ij ∈ E. This is handled with the
variables θ
ij
∈ {0, 1}∀ij ∈ E. Finally, (18)-(19) are
domain constraints for the decision variables.
As it can be observed, the number of SECs in
MIP
1
is exponential. To overcome this difficulty, we
further consider the following MILP model which
uses a well known characterization of the feasible
space of the traveling salesman problem (Letchford
et al., 2013; Miller et al., 1960)
MIP
2
: max
{ f,g,x,u,λ,µ,θ,ν}
(
∑
ij∈E
C
ij
f
ij
+
∑
ij∈E
D
ij
g
ij
)
s.t.
∑
j:i j∈E
A
ij
f
ij
+
∑
j:i j∈E
B
ij
g
ij
≤ c, ∀i ∈ V
f
ij
+ g
ij
≤ Mx
ij
, ∀ij ∈ E
∑
j:i j∈E
x
ij
= 1, ∀i ∈ V
∑
j: ji∈E
x
ji
= 1, ∀i ∈ V
u
1
= 1 (20)
2 ≤ u
i
≤ |V|, ∀i ∈ V, (i 6= 1) (21)
u
i
− u
j
+ 1 ≤ (|V| − 1)(1 − x
ij
),
∀ij ∈ E, (i 6= 1), ( j 6= 1) (22)
u
j
∈ Z
+
, ∀ j ∈ V (23)
x
ij
∈ {0, 1}, f
ij
≥ 0, ∀ij ∈ E
H
ij
− λ
i
R
ij
+ µ
ij
= 0, ∀ij ∈ E
∑
j:i j∈E
Q
ij
f
ij
+
∑
j:i j∈E
R
ij
g
ij
≤ r, ∀i ∈ V
r−
∑
j:i j∈E
Q
ij
f
ij
−
∑
j:i j∈E
R
ij
g
ij
+ ν
i
L ≤ L, ∀i ∈ V
λ
i
≤ ν
i
L, ∀i ∈ V
µ
ij
+ θ
ij
L ≤ L, ∀ij ∈ E
g
ij
≤ θ
ij
L, ∀ij ∈ E
g
ij
, µ
ij
≥ 0∀ij ∈ E, λ
i
≥ 0∀i ∈ V
ν
i
∈ {0, 1}∀i ∈ V, θ
ij
∈ {0, 1}∀ij ∈ E
where the constraints (22) ensure that, if the sales-
man travels from i to j, then the nodes i and j are ar-
ranged sequentially. These constraints together with
(20)-(21) and (23) ensure that each node is in a unique
position. A third formulation can be obtained by us-
ing the classic single commodity flow formulation for
the TSP (Gavish and Graves, 1978; Letchford et al.,
2013). For this purpose, we assume that the salesman
carries |V| − 1 units of a commodity when he leaves
node 1, and delivers 1 unit of this commodity to each
node. We can define additional continuous variables
On a Traveling Salesman based Bilevel Programming Problem
331
w
i, j
≥ 0, ∀ij ∈ E representing the amount of the com-
modity (if any) routed directly from node i to node j.
The new MILP formulation is
MIP
3
: max
{ f,g,x,w,λ,µ,θ,ν}
(
∑
ij∈E
C
ij
f
ij
+
∑
ij∈E
D
ij
g
ij
)
s.t.
∑
j:i j∈E
A
ij
f
ij
+
∑
j:i j∈E
B
ij
g
ij
≤ c, ∀i ∈ V
f
ij
+ g
ij
≤ Mx
ij
, ∀ij ∈ E
∑
j:i j∈E
x
ij
= 1, ∀i ∈ V
∑
j: ji∈E
x
ji
= 1, ∀i ∈ V
∑
j: ji∈E
w
ji
−
∑
j>1:ij∈ E
w
ij
= 1,
∀i ∈ {2, . . . , |V|} (24)
0 ≤ w
ij
≤ (|V| − 1)x
ij
, ∀ij ∈ E (25)
x
ij
, f
ij
≥ 0∀ij ∈ E
H
ij
− λ
i
R
ij
+ µ
ij
= 0, ∀ij ∈ E
∑
j:i j∈E
Q
ij
f
ij
+
∑
j:i j∈E
R
ij
g
ij
≤ r, ∀i ∈ V
r−
∑
j:i j∈E
Q
ij
f
ij
−
∑
j:i j∈E
R
ij
g
ij
+ ν
i
L ≤ L, ∀i ∈ V
λ
i
≤ ν
i
L, ∀i ∈ V
µ
ij
+ θ
ij
L ≤ L, ∀ij ∈ E
g
ij
≤ θ
ij
L, ∀ij ∈ E
g
ij
, µ
ij
≥ 0∀ij ∈ E, λ
i
≥ 0∀i ∈ V
ν
i
∈ {0, 1}∀i ∈ V, θ
ij
∈ {0, 1}∀ij ∈ E
The constraints (24) ensure that one unit of the com-
modity is delivered to each node while the bounds in
(25) ensure that the commodity can flow only along
arcs in the solution. Hereafter, we denote by LP
1
, LP
2
and LP
3
the LP relaxations of MIP
1
, MIP
2
and MIP
3
,
respectively.
In the next section, we present an alternative iter-
ative algorithmic procedure that allows to obtain op-
timal solutions and tight upper bounds for MIP
1
.
3 ITERATIVE PROCEDURE FOR
GENERATING SECS
The procedure to generate SECs can be easily adapted
using Algorithms 4.1 and 4.2 from (Adasme et al.,
2015) to MIP
1
. The main idea can be described as
follows. If we removeconstraints (11) from MIP
1
and
solve the resulting integer linear programming prob-
lem, then the underlying optimal solution induces a
graph
˜
G that may contain a cycle with at least two
nodes. In this case, it can be detected by a depth-first
search procedure (Cormen et al., 2009). In this pa-
per, we adapt the procedure 4.1 from (Adasme et al.,
2015) to find cycles in directed graphs with at least 2
and up to |V|−1 nodes. In particular,if the cardinality
of a subset of nodes found with Algorithm 4.1 induc-
ing a cycle equals |V|, we do not generate the SEC,
otherwise Hamiltonian cycles would be infeasible for
the problem.
Algorithm 3.1: Iterative procedure to compute upper
bounds for MIP
1
.
Data: A problem instance of MIP
1
.
Result: An upper bound with solution
( f, g, x
R
, λ, µ, θ, ν) for MIP
1
with objective
function value z
b
.
Step 0
: Set k = 1;
Let MIP
1
k
be the problem obtained from MIP
1
by
removing the constraints (11) at iteration k;
Solve the MILP relaxation of problem MIP
1
k
and let
( f
k
, g
k
, x
k
R
, λ
k
, µ
k
, θ
k
, ν
k
) be its optimal solution of
value z
k
at iteration k;
Let z
0
= inf;
Step 1: while |z
k−1
− z
k
| > ε do
Construct the graph
˜
G = (V,
˜
E) with the rounded
solution (
˜
f
k
, ˜g
k
, ˜x
k
R
,
˜
λ
k
, ˜µ
k
,
˜
θ
k
,
˜
ν
k
) obtained
from ( f
k
, g
k
, x
k
R
, λ
k
, µ
k
, θ
k
, ν
k
);
C = searchCycles(
˜
G,V);
foreach cycle ∈ C do
Add the corresponding constraint (11) to
MIP
1
k
;
Set k = k+ 1;
Solve the MILP relaxation of problem MIP
1
k
and let ( f
k
, g
k
, x
k
R
, λ
k
, µ
k
, θ
k
, ν
k
) be its optimal
solution of value z
k
at iteration k;
return the solution ( f
k
, g
k
, x
k
R
, λ
k
, µ
k
, θ
k
, ν
k
, z
k
);
Algorithm 4.1 is used iteratively by Algorithm
4.2 in (Adasme et al., 2015) that we adapt to solve
MIP
1
. The procedures in Algorithms 4.1 and 4.2 can
be straightforwardly explained in more detail as fol-
lows. First, we remove constraints (11) from MIP
1
and solve the resulting integer optimization problem.
Consider the underlying optimal solution graph
˜
G =
(V,
˜
E) where V is the set of nodes and
˜
E is the set
of arcs such that
˜
E ⊆ E. If
˜
G contains a cycle with
two or up to |V| − 1 nodes, then Algorithm 4.1 de-
tects it. A subset of nodes inducing a cycle defines a
new constraint (11) which cuts off this cycle from the
solution space. Problem MIP
1
is re-optimized taking
into account the new added constraints. This itera-
tive process goes on until the underlying current op-
timal solution of MIP
1
has no more cycles. Since the
number of cycles is finite, so is the number of con-
straints (11) that can be added to MIP
1
. Notice that
the number of SECs of type (11) that can be added to
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
332

MIP
1
is at most O(2
|V|
). Consequently, Algorithm 4.2
adapted to solve MIP
1
, converges to the optimal solu-
tion of the problem in at most O(2
|V|
) outer iterations.
The proof can be directly deduced from Theorem 2 in
(Adasme et al., 2015).
The aforementioned procedure can also be used
to compute upper bounds for MIP
1
. This proce-
dure is depicted in Algorithm 3.1 and is described
as follows. First, we remove constraints (11) from
MIP
1
and solve the resulting mixed integer linear
programming relaxation of MIP
1
obtained while re-
laxing the variables 0 ≤ x
ij
≤ 1 ∀ij ∈ E at step 0.
Next, we search cycles in the current rounded solu-
tion 0 ≤ x
ij
≤ 1 ∀ij ∈ E. If
˜
G contains a cycle with
two or more nodes, then Algorithm 4.1 referred to
as “searchCycles(
˜
G,V)” in (Adasme et al., 2015) de-
tects it. A subset of nodes inducing a cycle defines
a new constraint (11). The mixed integer program-
ming relaxation of MIP
1
is re-optimized taking into
account the new added constraints. This iterative pro-
cess goes on until the difference between the current
optimal objective function value z
k
and the previous
one z
k−1
is less than a small positive value ε.
4 PRELIMINARY NUMERICAL
RESULTS
In this section, we present preliminary numerical re-
sults. A Matlab (R2012a) program is developed using
CPLEX 12.6 to solve MIP
1
, MIP
2
, MIP
3
and their
corresponding LP relaxations. The numerical exper-
iments have been carried out on an Intel(R) 64 bits
core (TM) with 2.6 GHz and 8 Gigabytes of RAM.
CPLEX solver is used with default options. Each en-
try in matrices {C, D, H} and in matrices {A, B, R, Q}
is randomly and uniformly distributed in the inter-
vals [0;10] and [0;5], respectively. The scalar values
c = r = 100. The BigM values M and L are set to
M = 100 and L = 10
10
, respectively. We set the pa-
rameter ε = 10
−8
in Algorithm 3.1. In Table 1, first
we solve MIP
1
with up to 15 nodes while generat-
ing all cycle elimination constraints. Subsequently, in
Table 3, we solve MIP
1
with the iterative procedures
presented in section 3. We limit CPLEX to 2 hours
of CPU time in order to solve the linear models. The
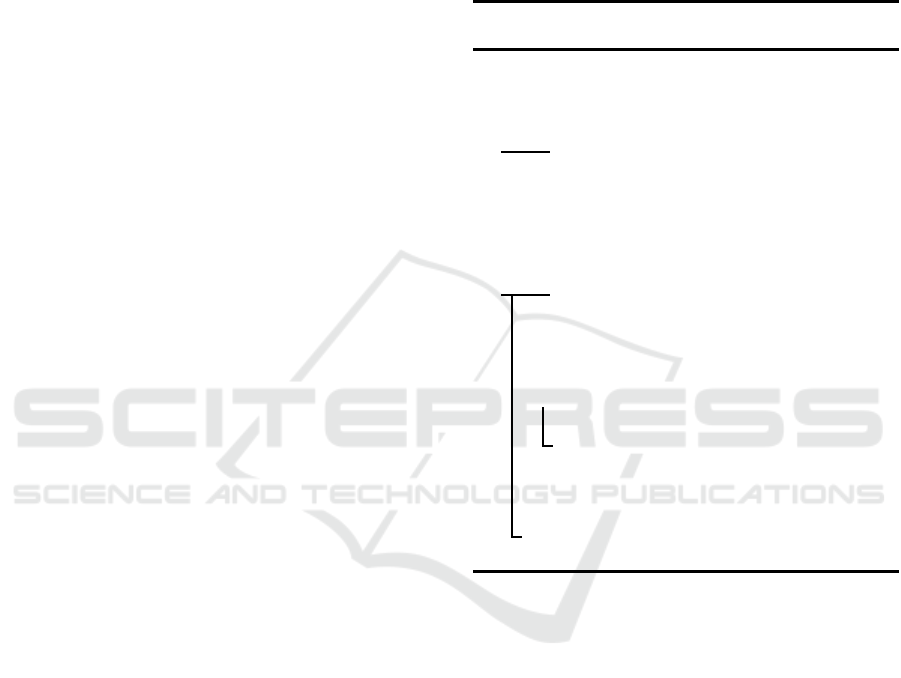
legend in Table 1 is as follows. Column 1 shows the
instance number. Column 2 presents the number of
nodes. Columns 3-7 and 8-12 present the optimal so-
lution of MIP
1
and MIP
2
, the number of branch and
bound nodes used by CPLEX, the CPU time in sec-
onds to solve the MILPs and their corresponding LP
relaxations together with their CPU time in seconds,
respectively. Finally, in columns 13-14, we present
gaps we compute as
h
LP−Opt
Opt
i
∗ 100 for MIP
1
and
MIP
2
, respectively. The legend in Table 2 for MIP
3
is analogous to Table 1. We mention that each row in
Tables 1, 2 and 3 corresponds to the same instance.
From Tables 1, 2 and 3, we observe that the op-
timal objective function values for MIP
1
, MIP
2
and
MIP
3
are exactly the same. In particular, in Tables
1 and 2, we see that the CPU times are in average
significantly lower for MIP
3
than for MIP
2
. In par-
ticular, when the instance dimensions increase. Re-
garding the number of branch and bound nodes, we
observe that CPLEX requires significantly less nodes
for solving MIP
3
than for MIP
2
. For MIP
1
, the num-
ber of nodes equals zero for the instances 1-7. Notice
that CPLEX cannot find a feasible solution within 2
hours for the instance #18 using MIP
2
. This is some-
how reflected by the number of branch and bound
nodes which is significantly higher for MIP
2
than for
MIP
3
. Concerning the LP bounds, the LP relaxations
are slightly tighter for MIP
1
than for MIP
2
and MIP
3
.
Whereas the bounds for LP
2
and LP
3
remain nearly
the same. On the opposite, the CPU times for LP
3
are in average larger than for LP
2
, in particular for
the large size instances. We also see that CPLEX
can solve all the instances to optimality using MIP
3
that shows a significantly better performance than the
rest of the MILP formulations. Finally, we mention
that we cannot solve, with the exponential model, in-
stances with more than 15 nodes due to the large num-
ber of sub-tour elimination constraints involved.
In Table 3, the legend is as follows. In column
1, we show the instance number. In columns 2-5, we
show the optimal solution obtained with the adapted
version of Algorithm 4.2 (Adasme et al., 2015), its
CPU time in seconds, the number of cycles found
with this algorithm and the number of iterations, re-
spectively. In columns 6-10, we present the upper
bounds obtained with Algorithm 3.1, its CPU time
in seconds, the number of cycles found with it, the
number of iterations, and the optimal solution found
with MIP
1
while using all the cycle elimination con-
straints found with Algorithm 3.1, respectively. For
the latter, we do not report the CPU time required by
CPLEX. However, we mention that for the largest size
instances (e.g. 21-22), these CPU times took less than
20 seconds. The rest of the instances were solved in
less than 2 seconds. Finally, in columns 11-12, we
provide gaps that we compute by
h
Opt
R
It
−Opt
It
Opt
It
i
∗ 100
and
h
Opt
F
It
−Opt
It
Opt
It
i
∗ 100, respectively.
From Table 3, we observe that Algorithm 4.2 can
find the optimal solutions for all the instances. In par-
ticular, we observe that the large size instances #15-22
are solved in significantly less CPU time compared to
On a Traveling Salesman based Bilevel Programming Problem
333
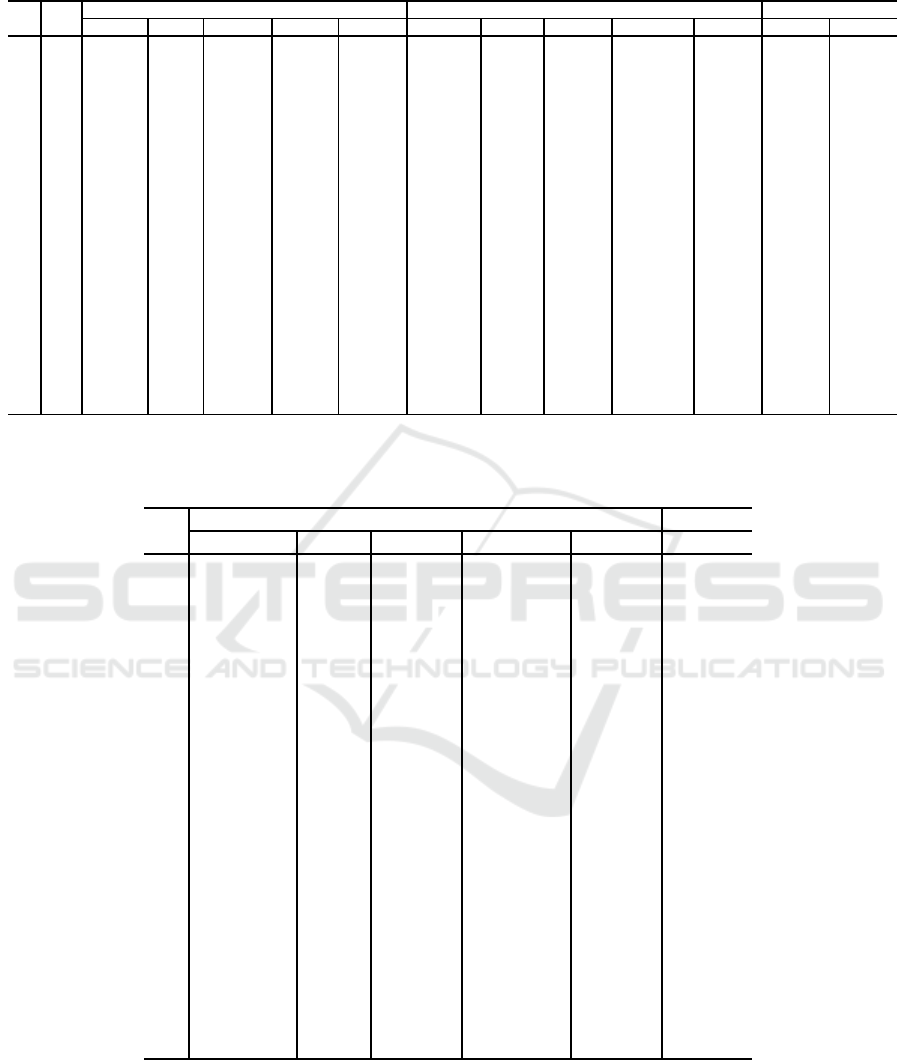
Table 1: Numerical results obtained with MIP
1
and MIP
2
.
# |V|
MIP
1
MIP
2
Gaps
Opt B&Bn Time (s) LP Time (s) Opt B&Bn Time (s) LP Time (s) Gap
1
% Gap
2
%
1 4 945.90 0 0.35 1547.52 0.35 945.90 0 0.36 1547.52 0.41 63.60 63.60
2 6 1223.95 0 0.41 1969.08 0.39 1223.95 0 0.41 1969.08 0.42 60.88 60.88
3
8 1574.80 0 0.37 2990.03 0.42 1574.80 0 0.37 2996.69 0.38 89.87 90.29
4 10 1992.63 0 0.53 5252.53 0.53 1992.63 29 0.34 5368.06 0.40 163.60 169.40
5
12 2781.27 0 1.83 5472.70 1.28 2781.27 6 0.40 5745.17 0.39 96.77 106.57
6 14 3795.17 0 7.13 6476.50 5.45 3795.17 120 0.42 6505.47 0.39 70.65 71.41
7
15 4233.11 0 14.74 6596.09 11.05 4233.11 0 0.39 6723.12 0.34 55.82 58.82
8 20 - - - - - 5920.61 1886 1.39 10090.09 0.39 - 70.42
9 25 - - - - - 7979.07 30 0.53 13672.93 0.38 - 71.36
10
30 - - - - - 11272.16 8 0.50 16961.67 0.41 - 50.47
11 40 - - - - - 14325.01 0 0.62 25545.21 0.52 - 78.33
12
50 - - - - - 17772.48 0 0.80 30645.26 0.55 - 72.43
13 60 - - - - - 23021.58 528 2.63 39462.28 0.86 - 71.41
14
70 - - - - - 28178.71 54 2.17 47919.83 1.19 - 70.06
15 80 - - - - - 32776.32 335 3.87 55799.72 1.55 - 70.24
16
90 - - - - - 35705.34 918 26.15 62552.35 1.90 - 75.19
17 100 - - - - - 42688.50 44278 452.83 73934.28 2.39 - 73.19
18
120 - - - - - * 379412 7200 86563.41 5.50 - *
19 150 - - - - - - - - 113013.27 21.22 - -
20
180 - - - - - - - - 139047.61 59.52 - -
21 200 - - - - - - - - 156705.84 73.85 - -
22
250 - - - - - - - - 201738.80 268.30 - -
-: Instance not solved.
*: No solution found with CPLEX in 2 hours.
Table 2: Numerical results obtained with MIP
3
.
#
MIP
3
Gaps
Opt B&Bn Time (s) LP Time (s) Gap
3
%
1 945.90 0 0.40 1547.52 0.37 63.60
2
1223.95 0 0.40 1969.08 0.37 60.88
3 1574.80 0 0.37 2996.69 0.39 90.29
4
1992.63 0 0.42 5361.12 0.37 169.05
5 2781.27 9 0.49 5745.17 0.39 106.57
6
3795.17 8 0.49 6485.70 0.42 70.89
7 4233.11 0 0.40 6723.12 0.36 58.82
8
5920.61 10 0.94 10047.35 0.43 69.70
9 7979.07 0 0.54 13618.52 0.41 70.68
10
11272.16 0 0.75 16961.67 0.45 50.47
11 14325.01 0 0.79 25538.77 0.68 78.28
12
17772.48 0 1.17 30645.26 0.64 72.43
13 23021.58 675 10.46 39453.01 1.05 71.37
14
28178.72 8 5.11 47881.09 1.83 69.92
15 32776.31 248 17.79 55799.72 2.93 70.24
16 35705.36 17 15.86 62552.35 2.53 75.19
17
42688.51 621 46.65 73934.28 3.75 73.19
18 50786.93 526 133.94 86493.02 17.00 70.31
19
66770.38 163 123.39 113003.02 58.75 69.24
20 86307.85 4168 2459.89 139046.61 211.01 61.11
21
93444.25 5678 6878.94 156675.69 230.30 67.67
22 122719.37 549 2017.85 201734.01 901.54 64.39
MIP
3
. Moreover, the number of cycles and iterations
are less or equal than 140 and 11, respectively for all
the instances. Notice that the total number of cycles
for most of the instances is huge. However, the num-
ber of cycles required by Algorithm 4.2 to find the
optimal solution is significantly small. In general, we
see that Algorithm 3.1 can find tighter bounds when
compared to the models LP
2
and LP
3
. Regarding the
number of cycles required by Algorithm 3.1, we ob-
serve that this number is significantly higher com-
pared to Algorithm 4.2. On the opposite, we see that
Algorithm 3.1 requires in average less iterations. Fi-
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
334
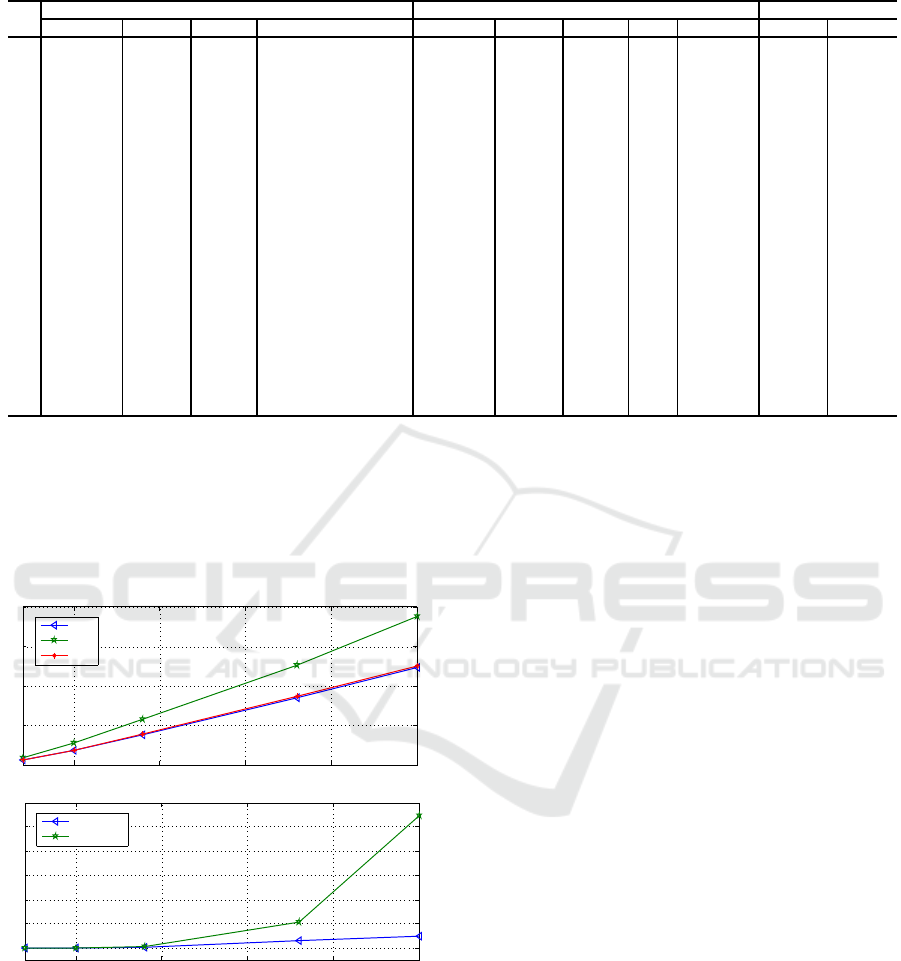
Table 3: Numerical results obtained with the iterative algorithmic procedures.
#
Algorithms 4.1 and 4.2 adapted from (Adasme et al., 2015) Algorithm 3.1 Gaps
Opt
It
Time (s) #Cycles #Iter Opt
R
It
Time (s) #Cycles #Iter Opt
F
It
Gap
R
% Gap
F
%
1 945.90 0.51 0 1 1443.61 1.09 10 2 945.90 52.62 0
2 1223.95 0.80 3 2 1899.73 0.80 8 1 1239.34 55.21 1.26
3
1574.80 0.76 4 2 2896.01 0.76 12 1 1574.80 83.90 0
4 1992.63 0.80 5 2 4269.07 1.08 32 2 2036.42 114.24 2.20
5
2781.27 1.26 8 3 4447.16 1.20 41 2 2787.50 59.90 0.22
6 3795.17 1.66 9 4 5800.14 1.26 41 2 3995.48 52.83 5.28
7
4233.11 1.25 8 3 5963.58 1.22 45 2 4328.84 40.88 2.26
8 5920.61 2.40 18 6 8952.44 1.23 58 2 6233.36 51.21 5.28
9 7979.07 0.89 12 2 13244.42 1.36 75 2 8441.78 65.99 5.80
10
11272.16 1.34 14 3 15160.96 1.51 97 2 11342.97 34.50 0.63
11 14325.01 1.63 18 3 23008.49 3.05 207 3 14661.88 60.62 2.35
12
17772.48 2.89 27 4 27771.65 2.95 168 2 18442.49 56.26 3.77
13 23021.58 12.30 45 11 36082.31 6.66 312 3 23959.25 56.73 4.07
14
28178.71 7.87 42 6 44084.55 6.28 235 2 29376.14 56.45 4.25
15 32776.31 16.27 55 9 51378.66 20.60 536 4 33437.84 56.76 2.02
16
35705.34 5.95 50 3 56294.82 10.57 323 2 36700.49 57.66 2.79
17 42688.50 27.17 71 10 65957.50 24.66 537 3 44117.89 54.51 3.35
18
50786.93 38.96 83 9 77440.29 25.01 413 2 52118.73 52.48 2.62
19 66770.38 71.56 92 9 101128.60 199.45 1090 4 68005.67 51.46 1.85
20
86307.85 153.10 125 11 127706.66 410.10 1007 3 87895.55 47.97 1.84
21 93444.25 122.41 127 7 141811.63 325.40 706 2 96921.84 51.76 3.72
22
122719.37 122.20 140 4 186448.77 948.96 919 2 126746.65 51.93 3.28
nally, we observe that solving MIP
1
with all the cy-
cle elimination constraints found with Algorithm 3.1
allows to compute tight bounds when compared to
the optimal solution of the problem. More precisely,
these bounds are computed with gaps which are lower
than 6% for most of the instances.
50 100 150 200 250
0
0.5
1
1.5
2
x 10
5
Number of nodes |V |.
50 100 150 200 250
0
200
400
600
800
1000
1200
Number of nodes |V |.
Opt
It
Opt
R
It
Opt
F
It
CPU (Opt
It
)
CPU (Opt
R
It
)
Figure 1: Average optimal solutions, upper bounds and
CPU times obtained with the iterative Algorithms 4.2 and
3.1.
In order to give more insight with respect to the
performance of Algorithms 4.2 and 3.1 when solving
MIP
1
. In Figure 1, we present some average numer-
ical results for 20 instances randomly generated with
dimensions of |V| = {20, 50, 90, 180, 250} nodes, re-
spectively. From Figure 1, we mainly confirm the
trends observed in Table 3. We observe that in av-
erage obtaining optimal solutions with the iterative
Algorithm 4.2 is more effective than computing up-
per bounds with Algorithm 3.1 in terms of CPU time.
This is an interesting result as it confirms that Algo-
rithm 4.2 allows to obtain optimal solutions for the
large scale instances more easily. More precisely, in
less CPU time than the instances presented in Table
3. Finally, we observe that the upper bounds obtained
with Algorithm 3.1 are very tight when solving MIP
1
with all SECs, although they are obtained at a higher
CPU time. In Figure 1, we do not plot averages for the
number of cycles and iterations as they remain nearly
the same as in Table 3 for all the instances. Similarly,
we do not plot the average CPU times for Opt
F
It
since
they are slightly larger than those obtained for Opt
R
It
.
5 CONCLUSIONS
In this paper, we consider a linear bilevel program-
ming problem where both the leader and the follower
maximize their profits subject to budget constraints.
Additionally, we impose a Hamiltonian cycle topol-
ogy constraint in the leader problem. In particular,
models of this type can be motivated by telecom-
munication companies when dealing with traffic net-
work flows from one server to another one within a
ring topology framework. We transform the bilevel
programming problem into an equivalent single level
optimization problem and derive mixed integer lin-
ear programming (MILP) formulations. The topology
constraint is handled by the means of two compact
On a Traveling Salesman based Bilevel Programming Problem
335

formulations and an exponential one from the clas-
sic traveling salesman problem. Our preliminary nu-
merical results show that one of the compact models
allows to solve instances with up to 250 nodes to op-
timality with CPLEX in less than two hours. Finally,
we propose iterative proceduresthat allow to compute
optimal solutions in significantly less computational
effort when compared to the compact models. Our
main contribution in this paper is not theoretical, but
mainly focussed on computational numerical results
on a novel problem in the domain of bilevel program-
ing. Our numerical results clearly show that solving
the exponential model with the iterative procedure is
by far more convenientthan using the compact formu-
lations which are more theoretical based approaches.
In fact, we solve to optimality instances with up to
250 nodes so far, in less than 70 seconds in average
compared to the higher CPU times required by the
compact formulations.
As part of future research, we plan to develop fur-
ther tests in order to confirm the behaviour of the
proposed models and algorithms. Finally, we will
propose new stochastic models and algorithmic ap-
proaches for this type of bilevel programming prob-
lems.
ACKNOWLEDGEMENTS
The first author acknowledges the financial support of
the USACH/DICYT Project 061513VC DAS.
REFERENCES
Adasme, P., Andrade, R., Letournel, M., and Lisser, A.
(2015). Stochastic maximum weight forest problem.
Networks, 65:289–305.
Audet, C., Hansen, P., Jaumard, B., and Savard, G. (1997).
Links between linear bilevel and mixed 0-1 program-
ming problems. Journal of Optimization Theory and
Applications, 93:273–300.
Cormen, T. H., Leiserson, C. E., Rivest, R. L., and Stein,
C. (2009). Introduction to algorithms. MIT Press and
McGraw-Hill, Cumberland, RI, USA.
Dempe, S. (2002). Foundations of bilevel programming.
(1st ed.). Freiberg: Kluwer Academic Publishers.
Dempe, S. (2003). Annotated bibliography on bilevel pro-
gramming and mathematical programs with equilib-
rium constraints. Optimization, 52:333–359.
Floudas, C. and Pardalos, P. (2001). Encyclopedia of opti-
mization. Dordrecht: Kluwer Academic Publishers.
Gavish, B. and Graves, S. C. (1978). The travelling sales-
man problem and related problems. Operations Re-
search Centre, Massachusetts Institute of Technology.
Lee, D., Attias, R., Puri, A., Sengupta, R., Tripakis, S., and
Varaiya, P. (2001). A wireless token ring protocol
for intelligent transportation systems. In IEEE Pro-
ceedings of: Intelligent Transportation Systems, pages
1152–1157.
Letchford, A. N., Nasiri, S. D., and Theis, D. O. (2013).
Compact formulations of the steiner traveling sales-
man problem and related problems. European Journal
of Operational Research, 228:83–92.
Migdalas, A., Pardalos, P., and Varbrand, P. (1997). Multi-
level optimization: Algorithms and Applications. The
Netherlands: Kluwer Academic Publishers.
Miller, C. E., Tucker, A. W., and Zemlin, R. A. (1960). In-
teger programming formulation of traveling salesman
problems. J. Assoc. Comput. Mach., 7:326–329.
Scholtes, S. (2004). Nonconvex structures in nonlinear pro-
gramming. Operations Research, 52:368–383.
Song, J. and Yang, O. (1997). Backbone networks using
rotation counters. IEEE Transactions on Parallel and
Distributed Systems, 8:1288–1298.
Thirwani, D. and Arora, S. (1998). An algorithm for
quadratic bilevel programming problem. Interna-
tional Journal of Management and System, 14:89–98.
Vicente, L., Savard, G., and Judice, J. (1994). Descent
approaches for quadratic bilevel programming. Jour-
nal of Optimization Theory and Applications, 81:379–
399.
Wang, S., Wang, Q., and Rodriguez, R. (1994). Optimal-
ity conditions and an algorithm for linear-quadratic
bilevel programs. Optimization, 31:127–139.
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
336
