
Practical Assumptions for Planning Under Uncertainty
Juan Carlos Sabor
´
ıo
1
and Joachim Hertzberg
1,2
1
Institute of Computer Science, University of Osnabr
¨
uck, Wachsbleiche 27, Osnabr
¨
uck, Germany
2
DFKI Robotics Innovation Center (Osnabr
¨
uck), Albert-Einstein-Straße 1, Osnabr
¨
uck, Germany
Keywords:
Problem Solving, Planning Under Uncertainty, Plan-based Robot Control.
Abstract:
The (PO)MDP framework is a standard model in planning and decision-making under uncertainty, but the
complexity of its methods makes it impractical for any reasonably large problem. In addition, task-planning
demands solutions satisfying efficiency and quality criteria, often unachievable through optimizing methods.
We propose an approach to planning that postpones optimality in favor of faster, satisficing behavior, supported
by context-sensitive assumptions that allow an agent to reduce the dimensionality of its decision problems. We
argue that a practical problem solving agent may sometimes assume full observability and determinism, based
on generalizations, domain knowledge and an attentional filter obtained through a formal understanding of
“relevance”, therefore exploiting the structure of problems and not just their representations.
1 INTRODUCTION
Planning in AI is the process of deliberately reason-
ing about and choosing actions that help an agent
achieve its goals. This behavior is goal-directed and
its actions may modify the agent’s environment. In-
stead of “lower level” actions related to sensing and
motor control, we assume a higher level of abstrac-
tion in terms of primitive commands (Ghallab et al.,
2016). These commands or tasks are the object of de-
liberation and provide a rich modeling framework to
represent and solve practical problems, such as serv-
ing a cup of coffee or finding a set of keys. Many if
not all of these everyday tasks, however, carry varying
degrees of uncertainty. As a normative decision the-
ory, expected utility theory (EUT) solves uncertainty
by recommending actions that maximize a combina-
tion of utility and probability (cf. (von Neumann and
Morgenstern, 1944)). In most practical domains, how-
ever, estimating the value of different outcomes and
determining optimal decisions is too slow or simply
infeasible. The underlying state and action represen-
tation for a decision-making agent might also lead
to massive search spaces due to combinatorial ex-
plosion known as the curse of dimensionality. This
severely limits planning and decision-making under
uncertainty in robots and similar agents.
These tasks are often modeled as a Markov De-
cision Process (MDP) or more generally as a Par-
tially Observable MDP (POMDP). Advances have
been made to speed up planning for (PO)MDP’s
and there has been relative success when transfer-
ring these methods to robot control. Often, however,
these advances require arguably small POMDP’s, hu-
man intervention or do not take advantage of poten-
tial, practical simplifications derived from the struc-
ture of problems and not just of their formal represen-
tations. Dimensionality reduction techniques such as
state aggregation or point-based belief estimation are
also based on fixed features that may not generalize
well across domains, for robots or agents attempting
to solve different types of problems.
We argue that practical problem-solving agents
must not necessarily assume problems are entirely
probabilistic or non-deterministic. Whether from ex-
perience or a given model, an agent may assume prac-
tical determinism for specific subproblems or choices
known to behave in a certain way. In addition, ef-
ficient task planning for robots and other agents re-
quires, at the moment, a satisficing (and not an op-
timizing) approach. Since much of what determines
whether two states or beliefs are similar or not, and
whether an action contributes to reaching a goal can
be summarized by what we intuitively understand as
relevance, we borrow this idea and attempt to formal-
ize it in order to produce context- and goal-sensitive
grouping criteria. For example, if a robot’s goal is
to exit a room all state descriptions not limiting the
completion of this task (eg. cup on table, cup not on
table, etc.) are irrelevant and all variations reduce to
Saborà o J. and Hertzberg J.
Practical Assumptions for Planning Under Uncertainty.
DOI: 10.5220/0006189004970502
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 497-502
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
497

the same state, and all actions not leading to the door
are also potentially irrelevant. Conversely, if the robot
must exit the room while holding the cup, then its lo-
cation becomes relevant. Exceptions can still be dis-
covered through guided exploration.
This paper outlines a research project whose main
interest is understanding and formalizing mechanisms
for fast and efficient state, action and possibly belief
estimation, in order to reduce the dimensionality of
otherwise complex decision processes. Its expected
contributions are a simplified approach to planning
under uncertainty for robots, within the context of
practical problem solving. Potential experimental sce-
narios include task-planning in robots with manip-
ulators, in open ended domains with loosely spec-
ified rules. The following sections review previous
work and briefly introduce the (PO)MDP framework.
Based on the requirements for robot task-planning,
we propose an architecture to support satisficing be-
havior in task planning.
2 RELATED WORK
Advances in planning under uncertainty can be
traced back to extensions of classical methods re-
lying on possible world semantics (cf. (Thi
´
ebaux
and Hertzberg, 1992), (Kushmerick et al., 1994),
(Boutilier et al., 1996)), but most current work
focuses on efficiently solving large MDP’s and
POMDP’s. Efficient MDP solvers include sparse sam-
pling using a generative model (Kearns et al., 2002)
as well as UCT (Kocsis and Szepesv
´
ari, 2006). TEx-
plore combined this sample efficient approach along-
side UCT and random forest model learning (Hester
and Stone, 2013). While its goals were similar to ours
(real-time planning and learning) TExplore focused
on low-level control operations and fully observable
domains.
Dimensionality reduction techniques for MDP’s
such as state aggregation and abstraction (Singh et al.,
1995) map elements from a large state set to a set
with lower cardinality, but reducing planning time
while maintaining performance is challenging. These
techniques are generally associated with hierarchi-
cal MDP planners, which use domain knowledge
to devise and solve intermediate goals contribut-
ing to faster convergence (eg. in POMDP’s (Vien
and Toussaint, 2015)). PolCA and PolCA+ (Pineau
et al., 2003) combine state abstraction and hierar-
chical planning and solve some higher-level tasks in
MDP’s and POMDP’s respectively.
Point-Based Value Iteration is a point-based
approximation to simplify belief estimation in
POMDP’s, which assumes groups of beliefs share the
same action choice and therefore, their values too
(Pineau et al., 2006). Beliefs may be chosen follow-
ing policies based on eg. probability or distance. This
directly addresses belief-space complexity but using
fixed criteria for clusters might have limitations when
generalizing across tasks.
POMCP, based on UCT, produced promising re-
sults for online planning in complex domains with-
out a complete transition model (Silver and Veness,
2010), but as far as we know it hasn’t been applied
in higher-level robot or agent planning where external
features may affect the real value of states and actions.
MDP planning overlaps with reinforcement learn-
ing (RL), a set of techniques to learn an MDP and its
optimal policy based solely on perceived numerical
rewards. Attempts to speed up convergence in RL in-
clude function approximation (cf. (Sutton and Barto,
2012)), using STRIPS plans as domain knowledge
(Grzes and Kudenko, 2008) and reward shaping based
on a proximity-to-goal heuristic (not always be avail-
able or easy to formalize). Potential-based reward
shaping however has been shown to preserve policy
optimality (Ng et al., 1999). Pure RL approaches are
capable of learning complex domains and policies but
quickly become intractable and impractical.
Recent results in robot control combined classi-
cal planning with assumptions derived from different
levels of domain knowledge, managing uncertainty
by constructing and solving very small POMDP’s
(Hanheide et al., 2015). This uncertainty referred to
the presence of objects in the environment, so actual
problem solving relied on conventional methods.
We can conclude existing approaches in planning
and problem solving under uncertainty assume do-
mains are stochastic and partially observable in their
entirety and do not take advantage of potential sim-
plifications derived from the actual problem repre-
sented by the POMDP. As planning domains become
more variable and tasks more abstract, the underlying
POMDP’s will also increase in complexity.
3 MDP’S
A Markov Decision Process is a tuple hS, A, T, γ, Ri
where S is a set of states, A is a set of actions,
T : S × A × S → [0, 1] is a state transition probabil-
ity function such that T (s, a, s
0
) = p(s
0
|s, a), γ ∈ [0, 1]
is a discount factor which determines the horizon, and
R is a set of real-valued rewards (or costs) associated
with each transition, (s, a, s
0
). When S, A and R are fi-
nite, the MDP is finite. A solution is a policy π : S → A
which maximizes the expected sum of rewards. States
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
498

represent the information available to an agent at a
given moment, which may include immediate sensory
information as well as that of previous states. If a state
carries all relevant information (for action selection),
it has the Markov property.
MDP’s assume complete observability: the agent
always knows the true state of the world. In partially
observable MDP’s, an agent has a set Ω of obser-
vations and an observation function O : S × A → Ω,
where O(s, a, ω) = p(ω|s, a) is the probability of ob-
serving ω in state s after executing action a. Because
one observation could lead to potentially many states
and, consequently, poor policies, the agent maintains
an internal belief state b ∈ B and a probability b(s)
that s is the current state, where b
t
(s) = Pr(s
t
=
s|h
t
) and h
t
= (a
0
, ω
1
, . . . , a
t−1
, ω
t
) is the history, or
sequence of actions and observations at time t. A
POMDP is therefore a tuple hS, A, T, γ, R, Ω, Oi.
4 TASK PLANNING IN ROBOTS
Planning agents often find constraints and limita-
tions that effectively modify their utility functions,
and make optimal behavior impractical. Instead, sat-
isficing behavior involves quickly filtering out ac-
tion prospects and assessing which elements in the
current state might contribute to reaching the goal,
an idea inspired by the intuitive notion of relevance.
When two agents communicate, new information may
be considered relevant if some contextual assump-
tion is strengthened by this new information as long
as not much effort is involved (Sperber and Wilson,
1995), suggesting a notion of context-sensitive util-
ity or cost. A formal approach to relevance should
consider a combination of an agent’s context (obser-
vations, state) and goal, and evaluate its immediate
options (actions) with respect to their contribution
to solving that particular goal. We can therefore un-
derstand relevance as an attentional filter guiding an
agent’s perception and action selection, implemented
through operators or functions, and leading to a se-
ries of simplifications. This idea guides our proposed
planning methodology.
4.1 Requirements of Practical Planning
Practical problem solving agents and robots, behave
in domains with the following characteristics:
• Multiple sources of uncertainty: non-
deterministic actions, inaccurate sensing.
• Potentially large action and state sets.
• Dynamic, changing environments.
• Limited resources (time, information, etc.)
In terms of granularity, we are interested in plan-
ning for higher-level tasks that contribute directly to
problem solving. This means actions might be some-
what abstract (but eventually grounded) and goals
might be loosely defined (i.e. “bring coffee mug” in-
stead of “move to point (x, y)”).
Existing approaches address some of these con-
cerns, but aren’t yet satisfactory for real-time plan-
ning. We argue that an understanding of (PO)MDP
solvers should be reached, following “common
sense” insight such as avoiding deep probabilistic
search for well-known, mundane tasks, and quickly
pruning available actions. We propose the following
assumptions:
• Practical determinism: sufficiently reliable transi-
tions may be assumed to be deterministic for prac-
tical purposes.
• Mixed observability: observations may resemble
known states with sufficient confidence (become
fully observable).
• Partial solutions: goals may be decomposed into
subproblems with known solutions, retrievable
from a model. Segments of the MDP may then be
solved quickly using a known plan.
These features require mechanisms to quickly es-
timate state and action values, through a combination
of sampling, simulation and knowledge representa-
tion. From now on we will refer only to POMDP’s
given their generality.
4.2 Assumptions and Simplifications
We will now develop our planning assumptions. The
result is a combination of deterministic and non-
deterministic transitions with mixed observability.
These two features plus the assumption of a do-
main model satisfy the aforementioned requirements
of practical problem solving. For the following, let S
be a finite state set, A be a finite action set, R be a fi-
nite set of rewards, B a finite set of beliefs and Ω a
finite set of observations.
Determinism. The transition τ(s, a) is defined in
equation 1, which assumes practical determinism if
the next state transition is known or reliable. Other-
wise it follows the usual stochastic transition behavior
of regular POMDP’s.
τ(s, a) =
s
τ
∈ S iff reliable or
known
ω ∈ S with p(ω|s, a) otherwise
(1)
Practical Assumptions for Planning Under Uncertainty
499

Definition 1. A transition is reliable if ∃s
0
∈
S . p(s
0
|s, a) > T
τ
∧ @s
00
∈ S . p(s
00
|s, a) > p(s
0
|s, a).
That is, the transition s
0
← (s, a) is assumed deter-
ministic if its probability is at least T
τ
, and only one
state satisfies this condition.
Definition 2. A known transition is one retrieved from
a model or knowledge representation, with or without
estimating its probability.
Observability. Certain contextual features might af-
fect the current belief distribution enough to directly
map it to a state. Such belief states are well-founded.
The underlying motivation is to circumvent expensive
belief computation by using knowledge about the reg-
ularity of problems, the domain and their solutions.
Definition 3. An observation ω ∈ Ω is well-identified
if it can be mapped to a state s ∈ S by a function f :
Ω → S.
We can assume more than one observation may be
mapped to some particular state. We may say obser-
vations ω
1
, . . . , ω
n
∈ Ω for n < |Ω| are associated to
state s ∈ S ⇐⇒ f (ω
1
) = . . . = f (ω
n
) = s. Finally we
define well-founded beliefs.
Definition 4 . A belief b
t
∈ B is well-founded if
b
t
f (ω
t
)
> T
β
.
which makes the belief of a particular state meet
probability threshold T
β
, reducing a belief distribution
to a state if the current observation is well-identified,
i.e. there is reason to assume the current state is, in
fact, some s ∈ S. In cases where no such relationship
exists and actions to reduce uncertainty must be taken,
a conventional solver may be used, albeit in a suffi-
ciently small POMDP.
Hierarchy. Partial solutions are supported by a com-
bination of a model, some form of state aggregation
and subtask identification. Explicit domain knowl-
edge may also allow a generative model to make more
accurate predictions, thus improving action selection.
This idea is similar to hierarchical planning.
These assumptions yield an augmented POMDP
hS, A, τ, γ, R, Ω, O, Mi, where τ is the new transition
function and M is a domain model. This POMDP
has only some non-observable states and only some
non-deterministic transitions, allowing a robot to con-
sider transitions such as “driving forward” or “going
through the door” as reliable, beliefs such as “the
blob on the door being the handle” as well-founded
and tasks such as turning the door handle as already
solved if a solution exists. We now propose a planning
algorithm that makes use of these assumptions.
4.3 Towards Practical Planning
Our proposed methodology consists of 1) Context-
sensitive dimensionality reduction (through abstrac-
tion and task hierarchy), 2) Simplified planning and
learning (efficient sampling and simulation with care-
ful value backups) and 3) Satisficing solutions. We
will now quickly develop these arguments and present
our preliminary algorithm for planning under uncer-
tainty.
Relevance functions and operators: A relevance
function applies a series of operators to a set (eg. of
actions, of observations, of states) to filter out those
that don’t contribute sufficiently to reaching the cur-
rent goal. Given a set of features K, a set of descrip-
tions or context D and a goal g, relevance function
r : K → K
r
produces a subset K
r
such that |K
r
| << |K|
where ∀k ∈ K
r
k contributes to achieving g. A promis-
ing direction is goal-directed simulation with a black-
box generator, using an aggregated representation of
states or beliefs.
Action selection: Based on the idea of practical de-
terminism for task-planning in POMDP’s, the action
selection policy may use a generative model to sam-
ple likely or known state transitions and find valuable
actions. Known action selection policies such as ε-
greedy, soft-max or even UCB1 may be followed, us-
ing approximate action values on a set containing only
relevant entries.
Planning and learning: The overarching algorithm
may implement planning alongside a long-term learn-
ing rule to incorporate perceived experience, similar
to the Dyna family of algorithms (Sutton and Barto,
2012). States or beliefs receiving value updates must
be carefully chosen and the number of updates mini-
mized, following relevance-based criteria.
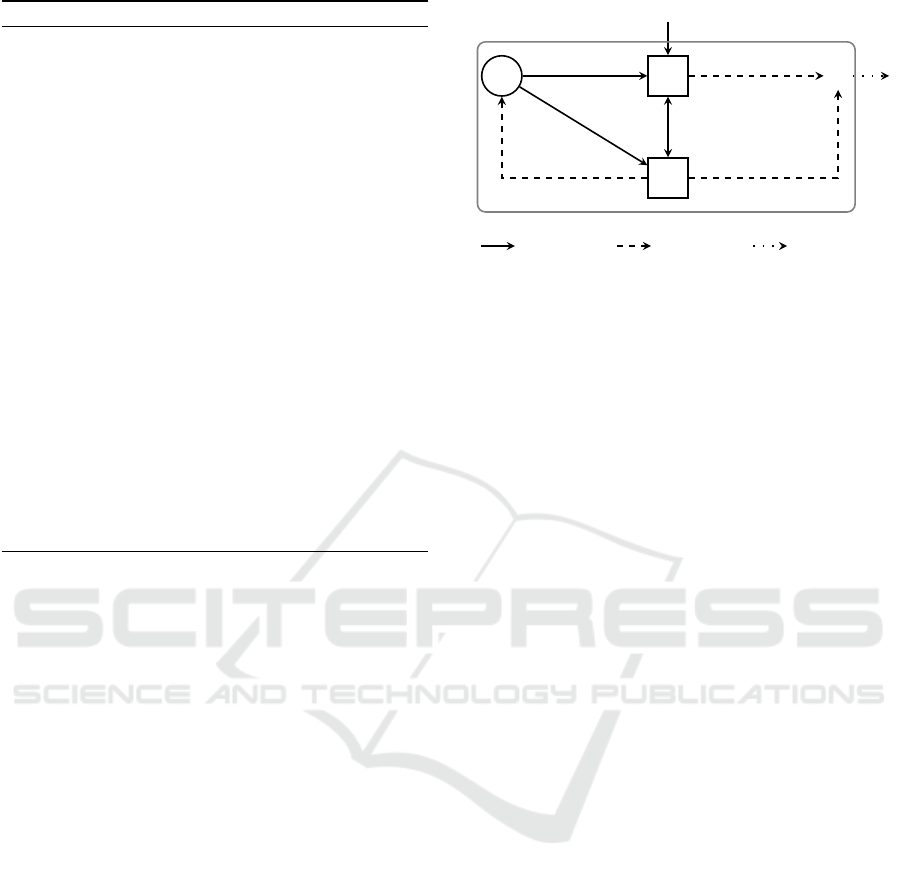
Algorithm 1 formalizes our task planning method-
ology. Relevance-driven steps are action selection,
observation to state mapping, state aggregation and
value back ups. A domain model is maintained and
updated (when necessary) by the UPDATEM function,
and the current best policy is made available to inter-
leave planning and acting. Figure 1 shows the func-
tional cycle, where solid lines represent necessary re-
lationships for execution, dashed lines represent con-
ditional relationships, and dotted lines represent on-
demand requests. From the domain model M state and
action values may be derived for a generative model
and the overall planner. The task planner deliberates
over transitions, updates the model and outputs a pol-
icy.
This completes our proposal to handle the afore-
mentioned challenges of practical task planning. We
address dimensionality and uncertainty through rele-
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
500
Algorithm 1: Agent Task Planning.
1: Input: initial state s, model M, goal description g
2: Output: policy π
3: function TASKPLANNING
4: repeat
5: a ← A(s) eg. generative model
6: ω, r ← (s, a)
7: s
0
←
(s, a) iff reliable or known
ω iff well-identified
PO subproblem otherwise
8: s
0
← aggregated s
0
9: M ← UPDATEM(M, s, a, ω, r, g)
10: Communicate current policy
11: s ← s
0
12: until s is terminal
13: return π
14: end function
15: function UPDATEM(M, s, a, ω, r, g)
16: Update M with (s, a, ω)
17: Update values
18: for all τ in M relevant to (s, a, g) do
19: Update associated s
0
, ω
0
, r
0
20: end for
21: return M
22: end function
vance driven abstraction and contextual assumptions.
Transitions with uncertainty that cannot be simplified
are solved as regular but small POMDP. Finally, de-
spite not considering external factors explicitly, the
agent might still cope with a certain degree of change
by interleaving planning and action.
5 DISCUSSION & CONCLUSIONS
We have presented a methodology for planning under
uncertainty, with the aim of reducing the complexity
of decision processes in robots and other agents. This
addresses an open challenge in (PO)MDP planning, in
order to control robots capable of real-time problem
solving with manipulation. In domains where robots
must respond quickly and efficiently, further simpli-
fications are necessary to achieve satisficing behav-
ior. Humans often rely on several cognitive shortcuts
such as insight and relevance, both intuitive and hard
to formalize. We have proposed that relevance may
be understood as context-sensitive, dimensionality re-
ducing operators, in the context of planning and learn-
ing.
While domains such as RockSample (Smith and
Simmons, 2004) serve as benchmarks for POMDP
planning algorithms, they do not accurately represent
practical problem-solving situations. In a real-world
rock sampling problem, the robot may have access to
M
G
Environment
π
P
ˆ
V (·)
Current plan
Update values
ˆ
V (·)
Update plan
a
Necessary
Conditional On Demand
Figure 1: Functional view of the task planner.
knowledge about the location, shape or appearance of
valuable rocks before even sampling them, and other
factors such as dangerous terrain might affect the real
value of samples. Planning for “simpler” tasks such
as finding a cup of coffee may also benefit from prac-
tical assumptions. We expect relevance operators will
contribute to planning in domains where external fac-
tors may introduce biases to quickly achieve satisfic-
ing behavior.
Variations of RockSample may also be of interest.
For instance, a setting with objects valued according
to features (eg. color, size, etc.) correlated with eg.
location, and with time and resource limitations (eg.
battery life). Observed features would lead to multiple
belief distributions, simplified using relevance-based
criteria. Information gathering actions are expensive
and may sometimes be avoided. When resources or
time start running out, the context and utility func-
tions may change: simpler objects might be more
valuable than distant, risky ones. A restaurant domain
such as that of RACE is also of interest (Hertzberg
et al., 2014). Here the robot must keep the patrons’
coffee cups or wine glasses full and like in RockSam-
ple, each table yields positive (needs refill) or negative
(doesn’t need refill) reward when visited, and check-
ing is costly.
A more complex scenario involves multiple ob-
jects and actions, in a puzzle-like setting. Relatively
simple goals such as “leave the room” might be tricky
if obstacles are present, requiring reasoning over mul-
tiple interactions such as pushing or even climbing.
State descriptions in this example must be heavily fil-
tered to maintain only relevant features and actions:
the location of a small table might be relevant if one
can climb on it, or the location of a chair if it can
be pushed out of the way. Informative actions might
be necessary to assess whether these actions are at all
possible.
Evaluation metrics such as cummulative reward,
regret or computing time may be applied in planning
robots but given our interest in abstraction and sim-
Practical Assumptions for Planning Under Uncertainty
501

plification, analyzing the scalability of these methods
in larger domains will also be important. Note that
most dimensionality reduction approaches substitute
the state set or the evaluation functions in (PO)MDP’s
and are therefore subject to different convergence and
optimality criteria. Our proposal is similar, assuming
that complex problems in POMDP form (P) have a
simpler, underlying representation (P
0
) from which
solutions may be extracted. These solutions should
be near-optimal within provable limits for P
0
, so an
additional challenge is finding what form of rele-
vance functions and operators preserve these proper-
ties when transferring policies back to P. We expect
the relevance thresholds previously introduced will al-
low us to estimate the approximation error.
Since this paper outlines a research project, there
is much work yet to be done. The core of this method-
ology are the context-sensitive relevance functions
and operators. A fully-functional system will require
state, observation and belief estimation and aggre-
gation. Efficient action selection, through simulation
techniques, might be a key step in avoiding irrelevant
transitions. Finally, a domain model binds these mod-
ules together and supports the practical assumptions.
Putting it all together is a challenge in its own right
but using context-sensitive criteria is the main inno-
vation of our proposal.
ACKNOWLEDGEMENTS
This work is supported by a DAAD research grant.
REFERENCES
Boutilier, C., Dean, T., and Hanks, S. (1996). Planning un-
der uncertainty: Structural assumptions and computa-
tional leverage. In In Proc. 2nd Eur. Worksh. Plan-
ning, pages 157–171. IOS Press.
Ghallab, M., Nau, D., and Traverso, P. (2016). Automated
Planning and Acting. Cambridge University Press,
San Francisco, CA, USA.
Grzes, M. and Kudenko, D. (2008). Plan-based reward
shaping for reinforcement learning. In Intelligent Sys-
tems, 2008. IS ’08. 4th Intl. IEEE Conf., volume 2,
pages 10–22–10–29.
Hanheide, M., G
¨
obelbecker, M., Horn, G. S., Pronobis, A.,
Sj
¨
o
¨
o, K., Aydemir, A., Jensfelt, P., Gretton, C., Dear-
den, R., Janicek, M., Zender, H., Kruijff, G.-J., Hawes,
N., and Wyatt, J. L. (2015). Robot task planning and
explanation in open and uncertain worlds. Artificial
Intelligence, pages –.
Hertzberg, J., Zhang, J., Zhang, L., Rockel, S., Neumann,
B., Lehmann, J., Dubba, K. S. R., Cohn, A. G., Saf-
fiotti, A., Pecora, F., Mansouri, M., Kone
ˇ
cn
´
y,
ˇ
S.,
G
¨
unther, M., Stock, S., Lopes, L. S., Oliveira, M.,
Lim, G. H., Kasaei, H., Mokhtari, V., Hotz, L., and
Bohlken, W. (2014). The RACE project. KI -
K
¨
unstliche Intelligenz, 28(4):297–304.
Hester, T. and Stone, P. (2013). TEXPLORE: Real-time
sample-efficient reinforcement learning for robots.
Machine Learning, 90(3).
Kearns, M., Mansour, Y., and Ng, A. Y. (2002). A Sparse
Sampling Algorithm for Near-Optimal Planning in
Large Markov Decision Processes. Mach. Learn.,
49(2-3):193–208.
Kocsis, L. and Szepesv
´
ari, C. (2006). Bandit based
Monte-Carlo Planning. In ECML-06, pages 282–293.
Springer.
Kushmerick, N., Hanks, S., and Weld, D. (1994). An algo-
rithm for probabilistic least-commitment planning. In
AAAI-94, pages 1073–1078.
Ng, A. Y., Harada, D., and Russell, S. (1999). Policy invari-
ance under reward transformations: Theory and appli-
cation to reward shaping. In In Proc. 16th Intl. Conf.
Mach. Learn., pages 278–287. Morgan Kaufmann.
Pineau, J., Gordon, G., and Thrun, S. (2003). Policy-
contingent abstraction for robust robot control. In
Proc. 19th Conf. on Uncertainty in Artificial Intelli-
gence, UAI’03, pages 477–484, San Francisco, CA,
USA. Morgan Kaufmann Publishers Inc.
Pineau, J., Gordon, G. J., and Thrun, S. (2006). Anytime
point-based approximations for large POMDPs. Jour-
nal of Artificial Intelligence Research, 27:335–380.
Silver, D. and Veness, J. (2010). Monte-Carlo Planning in
Large POMDPs. In In Advances in Neural Informa-
tion Processing Systems 23, pages 2164–2172.
Singh, S. P., Jaakkola, T., and Jordan, M. I. (1995). Re-
inforcement learning with soft state aggregation. In
Tesauro, G., Touretzky, D. S., and Leen, T. K., editors,
Advances in Neural Information Processing Systems
7, pages 361–368. MIT Press.
Smith, T. and Simmons, R. (2004). Heuristic Search Value
Iteration for POMDPs. In Proc. 20th Conf. on Uncer-
tainty in Artificial Intelligence, UAI ’04, pages 520–
527, Arlington, Virginia, United States. AUAI Press.
Sperber, D. and Wilson, D. (1995). Relevance: Communica-
tion and Cognition. Blackwell Publishers, Cambridge,
MA, USA, 2nd edition.
Sutton, R. S. and Barto, A. G. (2012). Reinforcement Learn-
ing: An Introduction. MIT Press, Cambridge, MA,
USA, 2nd edition. (to be published).
Thi
´
ebaux, S. and Hertzberg, J. (1992). A semi-reactive
planner based on a possible models action formal-
ization. In Artificial Intelligence Planning Systems:
Proc. 1st Intl. Conf. (AIPS92), pages 228–235. Mor-
gan Kaufmann.
Vien, N. A. and Toussaint, M. (2015). Hierarchical Monte-
Carlo Planning. In AAAI-15.
von Neumann, J. and Morgenstern, O. (1944). Theory of
Games and Economic Behavior. Princeton University
Press.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
502
