
Candidate Oil Spill Detection in SLAR Data
A Recurrent Neural Network-based Approach
Sergiu-Ovidiu Oprea
1
, Pablo Gil
2
, Damian Mira
1
and Beatriz Alacid
1
1
University Institute for Computer Research, University of Alicante, San Vicente del Raspeig, Spain
2
Department of Physics, Systems Engineering and Signal Theory, University of Alicante, San Vicente del Raspeig, Spain
{sergiu.oprea, pablo.gil, damian.mira, bea.alacid}@ua.es
Keywords:
Oil Spill Detection, Maritime Surveillance, SLAR Remote Sensing, RNN, LSTM, Classification.
Abstract:
Intentional oil pollution damages marine ecosystems. Therefore, society and governments require maritime
surveillance for early oil spill detection. The fast response in the detection process helps to identify the
offenders in the vast majority of cases. Nowadays, it is a human operator whom is trained for carrying out oil
spill detection. Operators usually use image processing techniques and data analysis from optical, thermal or
radar acquired from aerial vehicles or spatial satellites. The current trend is to automate the oil spill detection
process so that this can filter candidate oil spill from an aircraft as a decision support system for human
operators. In this work, a robust and automated system for candidate oil spill based on Recurrent Neural
Network (RNN) is presented. The aim is to provide a faster identification of candidate oil spills from SLAR
scanned sequences. So far, the majority of the research works about oil spill detection are focused on the
classification between real oil spills and look-alikes, and they use SAR or optical images but not SLAR data.
Moreover, the overall decision is usually taken by an operator, mainly due to the wide variety of types of look-
alikes which cause false positives in the detection process using traditional NN. This work provides a RRN-
based approach for candidate oil spill detection using SLAR data in contrast with the traditional Multilayer
Perceptron Neural Network (MLP). The system is tested with time series data acquired from a SLAR sensor
mounted on an aircraft. It achieves a success rate in detecting of 97%.
1 INTRODUCTION
Illegal pollution seriously damages marine ecosys-
tems health and induces important scientific politi-
cal concerns. Oil spill caused by the explosion of
Deepwater Horizon oil rig is considered the largest
accidental marine oil spill in the history of petroleum
industry. Nevertheless, half of the total oil spills
in marine ecosystems are caused by intentional dis-
charges (e.g. tank cleaning). It has been estimated
that 457,000 tonnes of oil are released in the ocean by
shipping every year (GESAMP, 2007)
Oil spill detection by continuous monitoring via
satellite or equipped aircraft is a crucial task in order
to reduce pollution indices. Synthetic Aperture Radar
(SAR) operated on satellites and mounted on aircraft
such as Sideward Looking Airborne Radar (SLAR),
can be effectively used for this purpose. The interest
in this particular research field is limited due to the
lack of public SAR and SLAR image datasets. The
main step in oil spill detection is performed by trained
operators and consists in visual inspection techniques
and analysis of extracted features from both images
and data. Nevertheless, due to the effectiveness of
machine learning-based techniques on remote sens-
ing, semi-automatic or fully automatic approaches are
the state-of-the-art in oil spill detection (Topouzelis,
2008). Most of these automatic approaches are re-
lated to traditional Multilayer Perceptron (MLP) neu-
ral networks, probabilistic approaches and fuzzy clas-
sification, using substantial datasets for training and
validation.
In image, oil slick detection seems to be trivial for
human operators, both semi-automatic and automatic
approaches have significant difficulties. Oil slick con-
trast is a variable feature which depends on oil type,
shape, age and as well on weather conditions and
ocean tides. Moreover, a wide range of look-alikes
such as fish shoals or seaweed accumulations, hinder
the detection process (Alacid and Gil, 2016).
During an emergency mission, SLAR position rel-
ative to the target varies in time with the aircraft
movement. A high resolution image is obtained be-
fore processing the successive recorded radar echoes
372
Oprea, S-O., Gil, P., Mira, D. and Alacid, B.
Candidate Oil Spill Detection in SLAR Data - A Recurrent Neural Network-based Approach.
DOI: 10.5220/0006187103720377
In Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2017), pages 372-377
ISBN: 978-989-758-222-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(Stimson, 1998). In other words and from the ma-
chine learning field viewpoint, we are dealing with
time series data. For this reason, Recurrent Neural
Networks (RNN) can be a feasible solution for this
problem (Williams and Zipser, 1989). SLAR-based
remote sensing of oil spills in contrast with satel-
lite detection, can cover narrow swaths, identifies the
polluter and also determines oil type, amount and if
clean-up is necessary. The motivation and main pur-
pose of this work is the development of an automatic
candidate oil spill detection system which will be op-
erated under an Aerial Vehicle (AV). A RNN-based
approach in SLAR imagery will be presented in con-
trast to the traditional MLP and other machine learn-
ing classification techniques.
Exposed the motivation of this work, the rest
of document is structured as follows: in Section 2
a review of related works is performed. Section
3 describes the used dataset and different machine
learning-based approaches, analyzed in this work.
The methodology followed for the experimentation
carried out is shown in Section 4. Finally, Section
5 details the conclusions and draws future work.
2 RELATED WORKS
In spite of the limited literature on oil spill detection
using machine learning techniques, there are several
relevant research papers. Statistical classifiers based
on probabilities are the most known (Solberg et al.,
1999) (Fiscella et al., 2000). Fuzzy classification ap-
proaches such as (Keramitsoglou et al., 2006) and
(Karathanassi et al., 2006) have been also employed
successfully. Nevertheless, we will focus on Neu-
ral Network-based (NN) methods in order to avoid
the feature extraction step considered important in the
aforementioned classifiers.
A MLP neural network based-approach with two
hidden layers was introduced by (Del Frate et al.,
2000). A three-stage pipeline is described: dark spot
detection (performed manually as a visual inspec-
tion), feature extraction (11 feature vector size de-
scribing the dark spots) and classification into oil spill
or look-alike using the MLP. This semi-automatic
system was trained and tested using 600 low resolu-
tion SAR images from the European Remote Sensing
(ERS) satellites. Moreover, a pruning procedure was
applied to the MLP in order to eliminate ineffective
connections. This method, using the leave-one-out
approach, misclassified 18% of the oil spills and 10%
of the look-alikes.
Another MLP neural network approach with one
hidden layer (51 neurons), 10 feature input vector size
and 2 output nodes was introduced by (Topouzelis
et al., 2007). The system was trained and tested us-
ing 24 high resolution SAR images containing 69 oil
spills and 90 look-alikes. NN topology was config-
ured using a genetic algorithm. The accuracy reported
on the test data was: 91% for oil spills and 87% for
look-alikes.
A new approach to SAR oil spill detection us-
ing two Artificial Neural Network (ANN) in sequence
was proposed by (Singha et al., 2013). As a typi-
cal SAR-based oil spill detection process (Topouzelis,
2008), a three-stage pipeline was implemented: dark
spot detection (first ANN with one hidden layer), fea-
ture extraction and classification into oil spill or look-
alike (second ANN with two hidden layers). Sub-
stantial SAR image dataset from European Maritime
Safety Agency (EMSA) was used for training and
validation reporting the 91.6% of oil spills correctly
classified. A recent comparative study of different
classification techniques using RADARSAT-1 SAR
imagery (Xu et al., 2014) shows that ANN was the
worst classifier among 7 different popular statistical
and machine learning classification techniques, such
as Support Vector Machine (SVM), tree-based ensem-
ble classifiers (bagging, bundling and boosting), Gen-
eralized Additive Model (GAM) and Penalized Lin-
ear Discriminant Analysis (PLDA). The tree-based
ensemble classifiers obtained more reliable and accu-
rate results in oil spill classification. Using a reduced
dataset, PLDA was considered a safer alternative in
contrast to more flexible classifiers such as Boosting,
ANN or SVM which were prone to cause overfitting.
Nevertheless, by applying data standardization and
log-transformation regarding to ANN and SVM re-
spectively, performance has been improved.
A comparison in term of classification accuracies
between the mentioned classifiers would not be reli-
able due to the use of different datasets which are not
always available, arbitrary number of extracted fea-
tures dependent on the acquisition sensor, as well as
various classifier configurations. For that, we will use
raw data for the classification and perform an exten-
sive experimentation with different ANN and RNN
configurations over the same dataset (acquired from
an aircraft) to achieve a reliable comparison among
different techniques based on MLPs and RNNs.
3 METHODOLOGY
The proposed system was implemented using Keras
v1.0.8 (Chollet, 2015) running on top of Tensorflow
v0.10.0 (Abadi et al., 2015). Keras is a minimal-
ist, highly modular neural network library written in
Candidate Oil Spill Detection in SLAR Data - A Recurrent Neural Network-based Approach
373
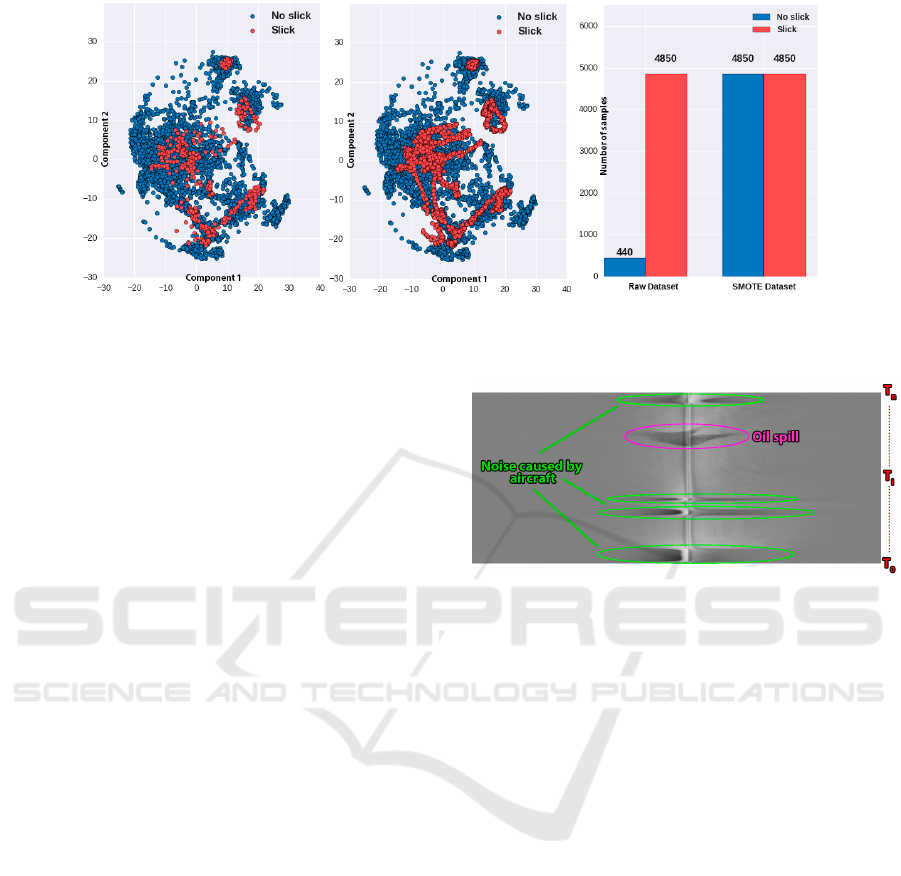
(a) Raw dataset (b) SMOTE dataset (c) Class distribution
Figure 1: Sample distribution representation using Principal Component Analysis (PCA) (Jolliffe, 2002) over 1158 sized
vectors of the original dataset and dataset with SMOTE.
Python and developed for fast prototyping and exper-
imentation. It supports different NN models such as
MLPs and RNNs. Moreover, it is easily configurable
and runs over both CPU and GPU.
The aim of our system is to classify the inputs
in slick and no slick candidates. The output is a bi-
nary classification. To accomplish it, we use a sin-
gle neuron as output layer with a sigmoid activation
function and train our system using binary cross en-
tropy as loss function with Adam optimizer (Kingma
and Ba, 2014) for MLPs and RmsProp (Tieleman and
Hinton, 2012) in the case of RNNs. Input and out-
put sequences are differently processed regarding the
RNN models. We use a many to one model where the
last sample of a given sequence is classified using the
previous computation over the rest of the sequence. In
other words, only the last output o
t+1
of the unrolled
network is considered for classification as shown in
Figure 3.
In this section we will describe the related prob-
lems of our dataset and possible solutions provided by
authors, as well as the used machine learning-based
techniques and finally the performance appraisal pro-
cess of our models.
3.1 Dataset
Our system was trained and tested using 12 SLAR
records acquired from an aircraft (e.g. Figure 2).
Small datasets hinder the application of most machine
learning techniques and lead the classifier to over-
fitting over the training and validation data. More-
over, data noise is considered an significant issue. In
order to mitigate these problems, an analysis of our
dataset was performed.
Our system inputs are based on the rows of each
SLAR record (1158 sized vectors) which represents
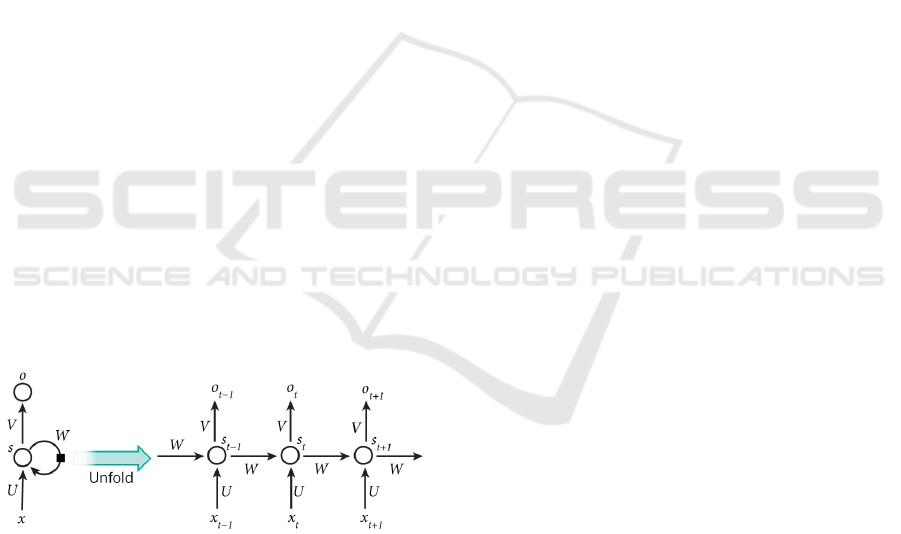
Figure 2: SLAR record representing a video sequence from
time t
0
to time t
n
where t
i
is considered an individual row of
data. Oil slick is surrounded by purple and different noise
patterns, because of the AV twists, by green.
the SLAR scanning for a time t
i
. Dealing with
time series data, a row is considered a scanning of
a sea part, relied to the aircraft movement. We con-
sider each row as an individual sample. Our sys-
tem was tested over a balanced dataset of 9700 sam-
ples (Figure 1b) where Synthetic Minority Oversam-
pling Technique (SMOTE) was applied over the orig-
inal dataset of 5290 samples (Figure 1a). SMOTE
(Chawla et al., 2002) is an over-sampling approach in
which the distance between the feature vector (sam-
ple) and its nearest neighbor is computed. The re-
sulted difference is multiplied by a random number
([0,1] range) and added to the feature vector under
consideration. In this way, a new different sample is
obtained.
Class distribution from raw dataset showed in Fig-
ure 1c, represents a 11:1 sample ratio of no slick
to slick classes. This indicates that we are dealing
with an imbalanced dataset. A dataset is imbalanced
when the classification categories are not approxi-
mately equally represented. Therefore, an accuracy
metric is not appropriate when data are imbalanced
and more performance metrics and techniques such
as, precision and recall, Receiver Operating Charac-
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
374
teristic (ROC) curve and confusion matrix are needed
(Chawla, 2005).
In our dataset, different noise types are given.
Turns or changes of direction caused by AV (Figure
2) can be successfully removed with a combination
of different image processing techniques (Alacid and
Gil, 2016). Nevertheless, in this work we train the
system with raw data without preprocessing. Using a
reduced dataset, noise is considered relevant informa-
tion for the classifier in order to improve generaliza-
tion over new input data.
Here, the system is tested from a manually se-
lected dataset with 109 slick and 394 no slick sam-
ples.
3.2 Neural Algorithms
MLPs have proven to be very effective in the classifi-
cation of remote-sensing data reporting outstanding
performance results using different configurations.
MLP is a feedforward ANN consisting of multiple
neuron layers (directed graph structure) with the main
purpose of mapping the input data to a set of outputs.
It is a modification of linear perceptron in order to
classify not linearly separable data.
In MLP and traditional neural network models, all
inputs and outputs are independent each other. In con-
trast with this idea and because of the directed cycle
connection between units, RNN are able to create in-
ternal states in order to process input sequences. The
main idea of RNN is to perform the same task over
each element of the sequence depending on previous
computation.
Figure 3: RNN basic structure and unfolding in time ac-
cording to the number of sequence elements. In this figure,
the network is unrolled into a 3-layer NN.
In Figure 3, x
t
is the input at time step t. Hid-
den units are grouped under node s
t
and get inputs
from other neurons at previous time steps. In this way,
RNN can map an input sequence with elements x
t
into
an output sequence with elements o
t
, depending on all
the previous x
0
t
(for t
0
≤ t) (LeCun et al., 2015). In the-
ory, RNNs input sequences can be arbitrarily long, but
in practice they are limited to only a few steps (van-
ishing gradients problem) (Bengio et al., 1994).
The problems of long-term dependencies and van-
ishing gradients have been solved with Long Short
Term Memory (LSTM) networks (Hochreiter and
Schmidhuber, 1997). In contrast with RNNs, unit in-
ternal structure has four layers interacting in a special
way, instead of heaving a single NN layer. LSTMs
help preserve the error which can be backpropagated
through time and layers.
There are more sophisticated RNN-based models,
such as Bidirectional RNNs (BRNN) (Schuster and
Paliwal, 1997). In that model, output at time t also
depends on future elements. BRNN structure is just
based on two RNNs stacked on top of each other. The
main idea is that output is computed regarding hidden
states of both RNNs.
A special highlight of our implementations is the
use of dropout (Srivastava et al., 2014). Due to the
large number of features and the reduced dataset,
over-fitting is a real problem to deal. Dropout is a
technique for addressing and handling this problem.
The key idea is to randomly drop units (along with
their connections) from the neural network during
training.
3.3 Performance Evaluation
Our experiments were focused into an exhaustive con-
figuration of MLP and RNN solutions reporting the
performance results in terms of accuracy, precision
and recall using the described dataset in Section 4.
Comparing the results we are able to select the most
suitable model for our purposes. We have tested
the following model configurations with and without
dropout on fully connected layers and recurrent con-
nections:
• MLPs with one or two hidden layer(s)
• Vanilla RNN
• LSTM networks
• Bidirectional LSTM networks
Each of the models were tested varying the acti-
vation functions on layers (ReLu and sigmoid com-
binations), neuron number on hidden layer(s), batch
size, dropout value and time step length in the case of
RNNs. A ranking of best model configurations was
performed.
4 RESULTS AND DISCUSSION
After an exhaustive test of multiple different MLP and
RNN configurations, a ranking of the best five models
of both MLP and RNN networks is represented on
Candidate Oil Spill Detection in SLAR Data - A Recurrent Neural Network-based Approach
375
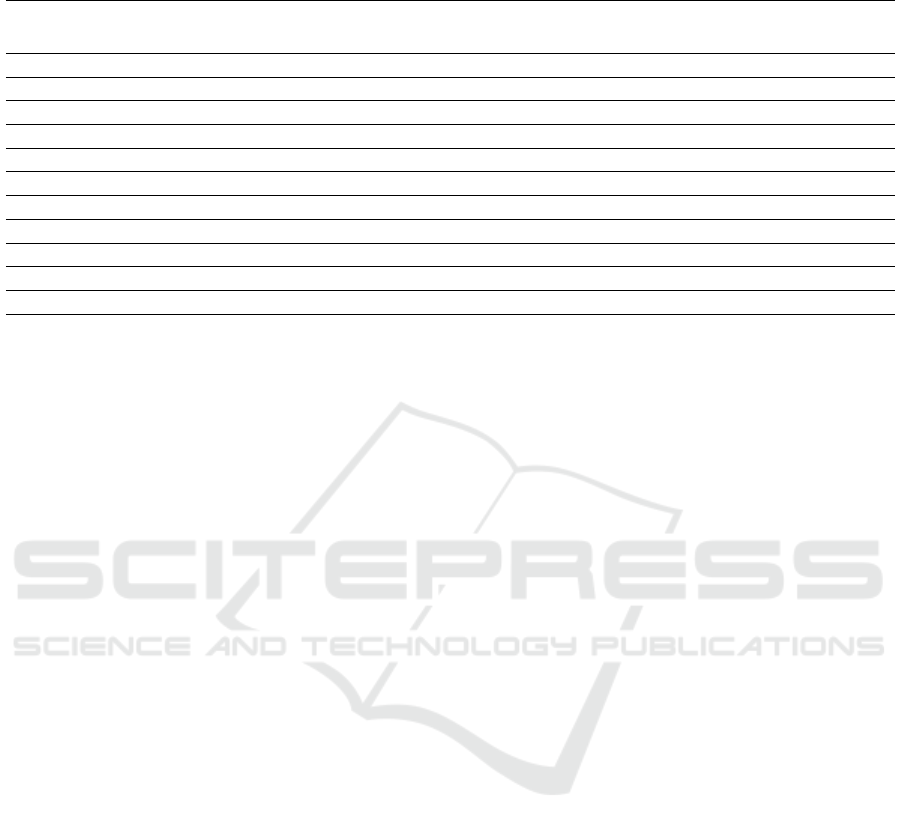
Table 1: Ranking of the five best models of MLPs and RNNs in comparison with C-Support Vector Classification (SVC) with
RBF kernel.
Model
id
Time
steps
Hidden
layers
Hidden
neurons
Dropout
connection
Dropout
value
Accuracy (%) Precision Recall
BRNN1 3 - 180 recurrent 0.2 97.00 0.9632 1.0
BRNN2 3 - 320 no dropout - 97.00 0.9701 0.9923
MLP1 - 1 260 input-hidden 0.6 96.82 0.9725 0.9873
MLP2 - 2 240 input-hidden 0.4 96.62 0.9724 0.9847
LSTM1 2 - 140 input-recurrent 0.4 96.22 0.9628 0.9898
MLP3 - 2 100 no dropout - 96.22 0.9652 0.9873
LSTM2 2 - 280 recurrent 0.2 96.21 0.9722 0.9796
BRNN3 3 - 260 input-recurrent 0.2 96.20 0.9583 0.9949
MLP4 - 2 320 hidden-hidden 0.2 96.02 0.9606 0.9898
MLP5 - 1 260 input-hidden-hidden 0.4 95.63 0.9673 0.9771
SVC - - - - - 95.03 0.9424 0.9974
Table 1. In order to a better understanding of the table,
a description of each column is required:
• Model id: each network has an identifier repre-
senting the NN type
• Time steps (only for RNNs): number of sam-
ples of each input sequence. Although, the ex-
periments have been designed with up to 10 time
steps, with more than 3 steps, no significant im-
provement was noticed.
• Hidden layers (only for MLPs): number of hidden
layers. MLPs with more than 2 hidden layers have
not report a significant improvement and only in-
creased training time.
• Hidden neurons: number of hidden layer(s) neu-
rons. Our system was tested with a number of
neurons from 20 to 400, with an increment of 20.
• Dropout connection: indicates where dropout
technique is applied (e.g. input-recurrent implies
a dropout between inputs and first RNN node and
between recurrent connections)
• Dropout value: a 0.4 dropout indicates 40% less
connections. Dropout value is selected experi-
mentally, nevertheless, experiments proven that
good values are between 0.2 and 0.6 (Srivastava
et al., 2014).
Additionally, the results are shown in terms of:
• Accuracy: classification score for correctly pre-
dicted samples.
• Precision: measure of result relevancy which re-
lates to a low false positive rate.
• Recall: measure of the number of relevant results
returned. Relates to a low false negative rate.
A system with high precision and recall indicates
that the classifier is returning many results (high re-
call) with all results labelled correctly (high preci-
sion). All tested configurations pointed to good clas-
sification results in terms of accuracy, precision and
recall. Nevertheless, a better general performance has
been achieved with RNN configurations, concretely
BRNN1 and BRNN2. The small performance dif-
ference between RNNs and MLPs indicates that both
NN models fitted very well our SLAR dataset. In or-
der to avoid overfitting, early stopping technique re-
garding validation loss has been applied. In the im-
plemented experiments, our system stops the train-
ing when the validation loss value stops its decreas-
ing. Dataset and model complexity should be directly
proportional. Otherwise, the machine learning model
will overfit over both validation and test data. In or-
der to ensure that a simpler model underperformed
that neural networks, a SVC model was implemented.
Classification results were above 94% of accuracy.
LSTM and BRNN performed better than vanilla
RNNs. For that reason, vanilla RNNs are not present
in the ranking. The reduced time steps number re-
garding RNNs should be due to noise presence in our
input data. Experimental results show that our sys-
tems perform better with as much 3 time steps se-
quences.
5 CONCLUSIONS
In this paper different RNN-based machine learning
techniques have been implemented and tested for can-
didate oil spill detection using SLAR data acquired
from an AV. BRNN with two different configurations
have reported the best classification results from our
test dataset (97% accuracy). A general better perfor-
mance was achieved using RNNs instead of MLPs
whose use is widespread in most of the state-of-the-
art works regarding this issue. In order to overcome
the imbalanced dataset problem, SMOTE technique
was successfully applied. The use of RNN in this pa-
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
376

per was mainly motivated by the naturalness of SLAR
data.
This work is considered an initial approach for
a robust candidate oil spill detection system using
SLAR data with the main purpose of achieving a
faster identification of the polluter ship. As future
work, advanced LSTM networks variations such as
Gated Recurrent Unit (GRU) (Cho et al., 2014) will
be tested. At the same time, more data will be pro-
vided to keep training our system for achieving more
robustness.
ACKNOWLEDGEMENTS
The authors would like to thank INAER Helicopters
SAU, which is part of Babcock International Group
plc, for the provision of data. This work was sup-
ported by the Spanish Ministry of Economy and Com-
petitiveness through the research project ONTIME
(RTC-2014-1863-8).
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin,
M., et al. (2015). Tensorflow: Large-scale machine
learning on heterogeneous systems, 2015. Software
available from tensorflow. org, 1.
Alacid, B. and Gil, P. (2016). An approach for slar images
denoising based on removing regions with low visual
quality for oil spill detection. SPIE Remote Sens-
ing, Image and Signal Processing for Remote Sensing
XXII, 10004(19):1–10.
Bengio, Y., Simard, P., and Frasconi, P. (1994). Learning
long-term dependencies with gradient descent is diffi-
cult. IEEE transactions on neural networks, 5(2):157–
166.
Chawla, N. V. (2005). Data mining for imbalanced datasets:
An overview. In Data mining and knowledge discov-
ery handbook, pages 853–867. Springer.
Chawla, N. V., Bowyer, K. W., Hall, L. O., and Kegelmeyer,
W. P. (2002). Smote: synthetic minority over-
sampling technique. Journal of artificial intelligence
research, 16:321–357.
Cho, K., Van Merri
¨
enboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using rnn encoder-
decoder for statistical machine translation. arXiv
preprint arXiv:1406.1078.
Chollet, F. (2015). Keras. GitHub repository:
https://github. com/fchollet/keras.
Del Frate, F., Petrocchi, A., Lichtenegger, J., and Calabresi,
G. (2000). Neural networks for oil spill detection us-
ing ers-sar data. IEEE Transactions on geoscience and
remote sensing, 38(5):2282–2287.
Fiscella, B., Giancaspro, A., Nirchio, F., Pavese, P., and
Trivero, P. (2000). Oil spill detection using marine
sar images. International Journal of Remote Sensing,
21(18):3561–3566.
GESAMP, J. G. o. E. o. t. S. A. o. M. E. P. (2007). Estimates
of oil entering the marine environment from sea-based
activities.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Jolliffe, I. (2002). Principal component analysis. Wiley
Online Library.
Karathanassi, V., Topouzelis, K., Pavlakis, P., and Rokos,
D. (2006). An objectoriented methodology to detect
oil spills. International Journal of Remote Sensing,
27(23):5235–5251.
Keramitsoglou, I., Cartalis, C., and Kiranoudis, C. T.
(2006). Automatic identification of oil spills on satel-
lite images. Environmental Modelling & Software,
21(5):640 – 652.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization. CoRR, abs/1412.6980.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. Nature, 521(7553):436–444.
Schuster, M. and Paliwal, K. K. (1997). Bidirectional re-
current neural networks. IEEE Transactions on Signal
Processing, 45(11):2673–2681.
Singha, S., Bellerby, T. J., and Trieschmann, O. (2013).
Satellite oil spill detection using artificial neural net-
works. IEEE Journal of Selected Topics in Applied
Earth Observations and Remote Sensing, 6(6):2355–
2363.
Solberg, A. S., Storvik, G., Solberg, R., and Volden, E.
(1999). Automatic detection of oil spills in ers sar im-
ages. IEEE Transactions on Geoscience and Remote
Sensing, 37(4):1916–1924.
Srivastava, N., Hinton, G. E., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: a simple way
to prevent neural networks from overfitting. Journal
of Machine Learning Research, 15(1):1929–1958.
Stimson, G. W. (1998). Introduction to airborne radar.
SciTech Pub.
Tieleman, T. and Hinton, G. (2012). Lecture 6.5-rmsprop:
Divide the gradient by a running average of its recent
magnitude. COURSERA: Neural Networks for Ma-
chine Learning, 4(2).
Topouzelis, K., Karathanassi, V., Pavlakis, P., and Rokos,
D. (2007). Detection and discrimination between oil
spills and look-alike phenomena through neural net-
works. {ISPRS} Journal of Photogrammetry and Re-
mote Sensing, 62(4):264 – 270.
Topouzelis, K. N. (2008). Oil spill detection by sar images:
dark formation detection, feature extraction and clas-
sification algorithms. Sensors, 8(10):6642–6659.
Williams, R. J. and Zipser, D. (1989). A learning algo-
rithm for continually running fully recurrent neural
networks. Neural computation, 1(2):270–280.
Xu, L., Li, J., and Brenning, A. (2014). A comparative
study of different classification techniques for marine
oil spill identification using radarsat-1 imagery. Re-
mote Sensing of Environment, 141:14–23.
Candidate Oil Spill Detection in SLAR Data - A Recurrent Neural Network-based Approach
377
