
A Non-Local Diffusion Saliency Model for Magnetic Resonance Imaging
I. Ram
´
ırez
1
, G. Galiano
2
, N. Malpica
1
and E. Schiavi
1
1
Dpt. of Applied Mathematics, Material Sciences and Electronic Technology, King Rey Juan Carlos University,
C/Tulip
´
an s/n, 28933, M
´
ostoles, Madrid, Spain
2
Dpt. of Mathematics, Oviedo University. c/ Calvo Sotelo, 33007-Oviedo, Spain
Keywords:
Saliency Detection, Segmentation, Non-local Diffusion, Non-convex Optimization, Bilateral Filtering,
P-laplacian Operator, MRI, FLAIR, Tumor, Edema.
Abstract:
Based on previous work on image classification and recent applications of non-local non-linear diffusion equa-
tions, we propose a non-local p-laplacian variational model for saliency detection in digital images. Focusing
on the range 0 < p < 1 we also consider the regularized non-convex fluxes generated by the related hyper-
laplacian diffusion operators. With the aim of exploring the properties and potential applications of such
non-local, non-convex operators the model is applied to Magnetic Resonace Imaging (MRI) for Fluid Attenu-
ated Inversion Recovery image (FLAIR) modality showing promising numerical results. In this work Saliency
shall be understood as the relevant, outstanding region in a FLAIR image, which is commonly the brightest
part. It corresponds to a tumor and neighborhood edema. Our preliminary experiments show that the proposed
model can achieve very accurate results in this modality in terms of all the considered metrics.
1 INTRODUCTION
There is a general, growing interest in digital im-
age processing and computer vision applications for
(Visual) Saliency based models able to focus on per-
ceptually relevant information in digital images. Se-
mantic segmentation, object detection, object propos-
als, image clustering, retrieval and cognitive saliency
applications such as image captioning and high-
level image understanding are just few examples of
saliency based models. Saliency is also of interest
as a means to improve computationally efficiency and
increases robustness to clustering and threshold. De-
spite the lack of a general consensus on a proper math-
ematical definition of Saliency, it has a biologically
perceptive meaning whereas it models the mechanism
of human attention and consists of the task of finding
interesting objects in an image with or without prior
knowledge. It turns out that the right role of saliency
in models is then application dependent and this limit
the scope of general purpose methods. Recently there
is been a burst of research on Saliency due to its wide
application in leading medical disciplines such as
Neuroscience and Cardiology. In fact, when consid-
ering medical images such as those acquired in Mag-
netic Resonance Imaging (MRI) or Positron Emis-
sion Tomography (PET), the automatic obtainment
of saliency maps, can be useful for pathology detec-
tion, disease classification (Rueda et al., 2013), loca-
tion and segmentation of brain strokes, gliomas, my-
ocardium detection for PET images, tumors quantifi-
cation in FLAIR MRI (Thota et al., 2016) etc. Several
different techniques and approaches have been ap-
plied to construct saliency maps. They vary from low
dimensional manifold features minimization (Zhan,
2011), non-local sparse minimization (Wang et al.,
2014), graphs techniques (Harel et al., 2006), Partial
Differential Equations (PDE) (Li et al., 2013), super-
pixel (Liu et al., 2013), learning (Liu et al., 2014) and
Neural Networks based approaches (Bylinskii et al., )
(MIT-Benchmark).
With the aim to explore the applications and al-
gorithms of non-smooth, non-local, non-convex opti-
mization to PDE saliency based models, we present
in these notes, a new non-Local diffusion model for
PDE applied to Fluid Attenuated Inversion Recovery
(FLAIR) MR images for accurate location of tumor
and edema. The basis for the modeling exercise re-
lies in a recent model proposed by Li (Li et al., 2013)
for natural images saliency detection. Recent results
which justifies the interest for this applications can be
found in (Thota et al., 2016) and multichannel pseudo
RGB (Banerjee et al., 2016). PDE based variational
methods have provided to be effective to model gen-
eral low level computer vision processing tasks (de-
noising, restoration, deblurring, segmentation, super-
100
Ramà rez I., Galiano G., Malpica N. and Schiavi E.
A Non-Local Diffusion Saliency Model for Magnetic Resonance Imaging.
DOI: 10.5220/0006172101000107
In Proceedings of the 10th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2017), pages 100-107
ISBN: 978-989-758-215-8
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

resolution) allowing specific solutions to be obtained
based on Bayesian modelling. When first order nec-
essary optimality conditions are imposed on the non-
linear energy functional modeling data and a priori
knowledge, a PDE arises which has to be numerically
solved. Primal gradient-descent is a first step for a
problem understanding. Alternatively non-linear dif-
fusion processing has been shown to be a valid fil-
tering data processing method to design specific pre-
processing steps for further analysis. In any case, we
are leaded to solve non-linear (local) parabolic diffu-
sion equations. Anisotropy is an important character-
istic which can also be modeled in such a local flux
based diffusive processes, (Weickert, 1998). Nev-
ertheless, when non-local interactions are important
for pathology detection, non-local diffusion equations
have to be considered. Non-local integro-differential
equations have a long history, since the Fredholm in-
tegral equations of the first kind, but a great deal of
interest has been recently triggered due to its applica-
tions in image processing (Gilboa and Osher, 2008).
Based on such arguing we propose to extend the
local p−laplacian classification model of (Samson
et al., 1998) to a non-local framework for saliency
detection, and the non-local model proposed by (Li
et al., 2013) for p > 2 to include non-convex fluxes
related to the range 0 < p < 1. This paper is orga-
nized as follows. In section (2), based on the ap-
proach of (Samson et al., 1998) for image classifica-
tion, we define a local variational model which in-
cludes a new term for saliency detection. It generates
an absorption-reaction balance which drives the dif-
fusion process promoting a two classes binary image
labeling. Remarkably, such a term has a concave en-
ergy leading to a fast saliency detection. We also de-
fine an approximating family of edge-preserving po-
tential functions which allows to describe non-convex
diffusive fluxes. In section (3) we introduce the non-
local framework for PDE (Andreu-Vaillo et al., 2010).
Based on the approach of (Li et al., 2013), we define a
new variational model with the non-local p-laplacian
operator that provides non-local diffusion, combined
with a fidelity term coming from the Restoration
Bayesian framework, and a saliency term, inspired
by the Ginzburg-Landau (Aubert et al., 2005) super-
conductor theory. Non-local diffusion has multiple
applications in the literature among which stands out
the detection and preserving patterns capacity. How-
ever, when non-local non-convex flux is acting, the
non-convexity imposed (as a priori knowledge) with
0 < p < 1, forces the non-local gradient to be sparse,
in so far it minimizes the number of jumps (big non-
local gradient modulus) in the image domain. Actu-
ally, only sharp jumps are preserved, and the result-
ing image looks like a cartoon piece-wise constant
image. In section (4) we describe the numerical dis-
cretization using a semi-implicit Euler scheme com-
bined with a quantization step to speed up the com-
putations (Yang et al., 2009). The final saliency mask
is finally computed by a simple thresholding step. A
mask is generated to compare with the ground-truth.
Finally, in section 5 we present some preliminary re-
sults which show the promising performance of the
model in terms of accuracy and speed when applied
to FLAIR sequences of MR images.
2 LOCAL DIFFUSION
EQUATIONS
We start with a Bayesian Restoration model for image
classification which produces a Maximum a Posteri-
ori (MAP) estimation of the solution through the min-
imization of a nonlinear energy functional in Ω ⊂R
2
.
Let λ and α be fixed positive parameters. We consider
the functional (Samson et al., 1998)
E
ε,p
(u) = αJ
ε,p
(u) +
1
α
H(u) + λF(u) = (1)
= α
Z
Ω
φ
ε,p
(|∇u|)dx +
1
α
Z
Ω
h(u)dx+
+
λ
2
Z
Ω
|Ru − f |
2
dx
where h(u) is typically a quadratic function known as
a double-well potential function which we shall pre-
cise later on. The functions
φ
ε,p
(s) =
2
p
s
2
+ ε
2
p/2
−
2
p
ε
p
(2)
define an approximating family that allows to over-
come the no differentiability when 0 < p ≤ 1. When
ε → 0 we have φ
ε,p
(s) → φ
0,p
(s) = (2/p)|s|
p
. When
ε > 0 the φ
ε,p
family is differentiable for any p and
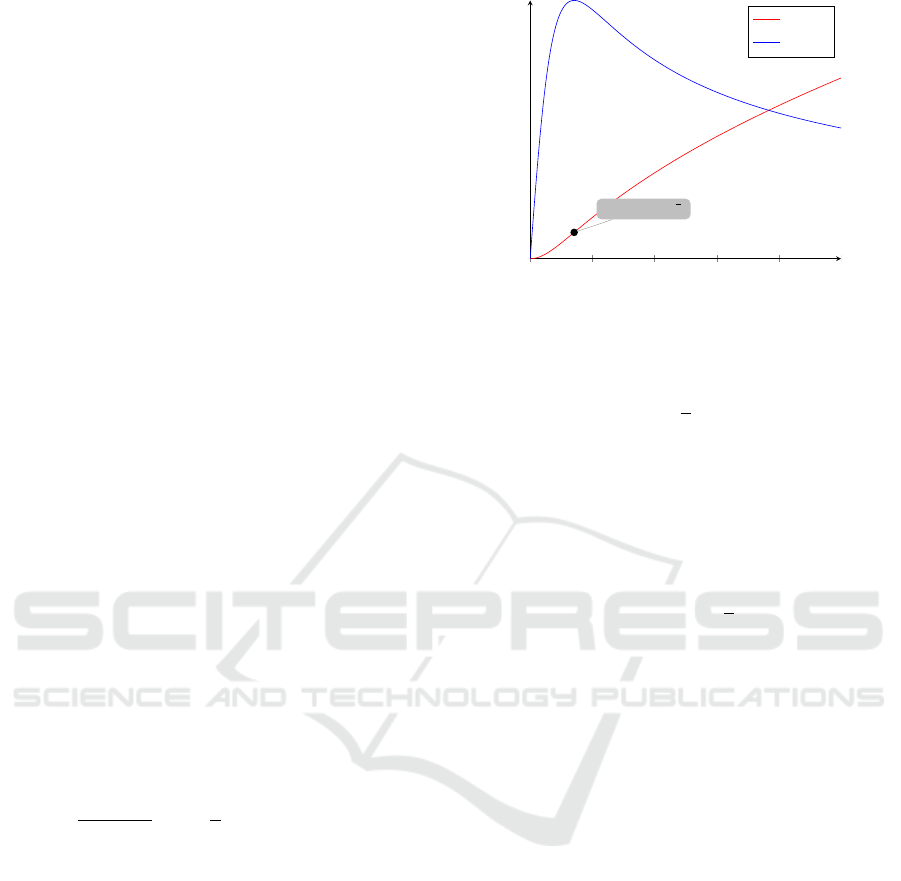
non-convex for 0 < p < 1. In fact, it is concave except
at a thin layer of thickness ε near the origin (see Fig-
ure 1). Despite of the non convexity, the φ
ε,p
-family is
edge-preserving (Charbonnier et al., 1997). This fam-
ily satisfies φ
ε,p
(0) = 0 for any p,ε. We shall assume
0 < p ≤ 1 and ε > 0. We have
φ
0
ε,p
(s) = 2s
s
2
+ ε
2
(p/2)−1
,
and then φ
0
ε,p
(0) = 0 for any p, ε and φ
0
ε,p
(s) > 0 for
s > 0 and ∀p,ε. When h(u) ≡ 0 the following re-
sults are well known. For parametric values p > 1 the
energy E
ε,p
(u) defined in (1) is convex and differen-
tiable presenting a unique global minimum. The dif-
fusive local flux over-smooths the solutions and blurs
A Non-Local Diffusion Saliency Model for Magnetic Resonance Imaging
101
the edges. For p = 1 and R ≡ I
d
we recover the cele-
brated ROF model (Rudin et al., 1992). The energy is
convex but no differentiable. We have again a unique
global minimum (Chambolle and Lions, 1997) in a
weak sense, say L
∞
(Ω)∩BV (Ω), where BV (Ω) is the
space of Bounded Variation Functions. This space in-
cludes discontinuous functions and its gradient is a
Bounded Radon measure. Details on the geometric
measure theory underlying this notions can be found
in the book of (Ambrosio et al., 2000).
Notice that when functionals like (1) are used
for image classification, partitioning and labeling, the
set of functions on which we minimize (for exam-
ple, piece-wise constant binary functions taking val-
ues {0, 1}) is not convex and the overall minimiza-
tion problem is not convex despite of the convexity of
the energy functional. Moreover, as shown in (Sam-
son et al., 1998), the solutions need not to be piece-
wise constant for α > 0, and this suggests to look for
solutions in the closed, convex interval [0,1]. When
α → 0 the Γ-convergence theory (so far proved only
for p > 1) assures the existence of piece-wise constant
binary solutions.
For 0 < p < 1 the energy is non-convex (in fact
concave) and non-smooth. No much is known the-
oretically in this range because the functional is not
differentiable and we are working with the so called
p−quasi-norms of the L
p
(Ω) spaces and the direct
method of variational calculus cannot be applied any-
more. The problem lacks of a sound mathematical
theory. A differential approximation is in order to
get insight into the numerical behavior of its solu-
tions. Let |∇u|
2
ε
= |∇u|
2
+ ε
2
. The associated Euler-
Lagrange equation is
−αdiv
φ
0
ε,p
(|∇u|)
|∇u|
ε
∇u
!
+
1
α
h
0
(u)+λR
∗
(Ru− f ) = 0 (3)
for p > 0, λ > 0 fixed and f ∈ L
∞
(Ω) given. If
p > 1 we can set ε = 0 and no regularization of
the diffusion operator takes place. For p = 1 the
1−Laplacian operator is considered and duality ar-
guments (Chambolle, 2004) have to be invoked to
properly solve the exact (not ε−approximating) TV
minimization problem. For 0 < p < 1 the problem is
open even with h(u) = 0. Remarkably, Hinterm
¨
uller
has recently shown the existence of a viscosity solu-
tion (Hinterm
¨
uller and Wu, 2014). The term h
0
(u) we
propose for saliency detection is a simple linear func-
tional given by
h
0
(u) = δ(1 −δu) (4)
which is the Frechet differential of the function
0 0.2 0.4
0.6
0.8 1
Saddle Point ˆs =
√
2ε
s
φ
ε,p
(s)
φ
0
ε,p
(s)
Figure 1: A plot of a member of the φ
ε,p
family. The saddle
point defines the transition from the convex initial layer to
a concave profile.
h(u) = −
1
2
(1 −δu)
2
(5)
where δ is a real positive parameter which can be con-
veniently fixed to deal with the variability of natu-
ral images. Contrary to the common usage of convex
quadratic terms to model double-well for image clas-
sification (Aubert and Kornprobst, 2006), we propose
in (5) a concave quadratic energy term
H(u) =
Z
Ω
h(u)dx = −
1
2
Z
Ω
(1 −δu)
2
In fact, the minimum of h(u) when u ∈ [0,1] is
min
u∈[0,1]
h(u) = min
{
h(0),h(1)
}
= m
where m = h(0) for 0 < δ < 2, m = h(0) = h(1) for
δ = 2 and m = h(1) for δ > 2. In any case, the min-
imum m is attained at the boundary of the interval
[0,1], which are the labels we impose for saliency
detection (foreground) u = 1, and u = 0 for back-
ground. The term H(u) promotes the detection of
salient regions of interest (foreground) separated by
regions with no relevant information (background)
while keeping the edges and details of the given data
image f ∈L
∞
(Ω) thanks to the edge-preserving prop-
erties of the φ
ε,p
-family.
Finally, the fidelity term F(u) models image
restoration and can be used to perform joint recon-
struction, deconvolution, super-resolution, denosing
of the given data. In the application we are concerned
with we simply set R ≡ I
d
.
The Euler-Lagrange equation (3) is com-
plemented, as usual in image processing, with
homogeneous Neumann boundary conditions on ∂Ω.
Using a gradient descent we are leaded to
BIOIMAGING 2017 - 4th International Conference on Bioimaging
102

u
t
= αdiv
φ
0
ε,p
(|∇u|)
|∇u|
ε
∇u
!
+
δ
α
(δu −1)−λ(u − f )
(6)
which is for p > 1 the classical p−laplacian diffusion
operator
u
t
= α∆
p
u +
δ
α
(δu −1) −λ(u − f ) (7)
The lower order r.h.s term models a linear
absorption-reaction balance which can produce dif-
ferent asymptotic behaviors depending on the chosen
parametric values. In fact we have
δ
α
(δu −1) −λ(u − f ) =
=
δ
2
α
−λ
u +
λ f −
δ
α
= au + b
Typical values used in the simulation, λ ≈ 0.1, α ≈
0.5, δ ≈ 2, ρ ≈ 20, give a ≈ 7.9 and b ≈ −3.9. As a
result, the linear term au +b models absorption when
u is positive and small, say u ≈ 0 (background), and
it acts as a reaction term in the region where u ≈ 1
(foreground). This mechanism pushes the solution
toward the labels of the two classes allowing a sim-
ple threshold for the final binary mask targeting the
ground-truth image.
3 NON-LOCAL DIFFUSION
EQUATIONS
We first briefly introduce the mathematical frame-
work of Andreu et al. which defines, for 1 ≤ p ≤ +∞
the non-local p-laplacian diffusion operators. Then, in
the framework of bilateral filtering, we extend the fil-
ter to include diffusion parameters 0 < p < 1. We start
with considering flux functions φ
p
(s) = (2/p)|s|
p
for
non-local diffusion. For p > 1 they are strictly con-
vex and differentiable, for p = 1 we have a con-
vex, sub-differentiable function and for 0 < p < 1 we
are not aware of any mathematical result about exis-
tence of variational solutions. Nevertheless many pa-
pers report on the improved numerical performance
of non-convex functions in terms of quality and nu-
merical efficiency. This has been observed in the lo-
cal framework where these functions are considered,
when 0 < p < 1, as edge-preserving functions. In the
non-local case this is, so far, unexplored.
3.1 Non-local Strictly Convex Flows
This corresponds to φ
ε=0,p
(s) = φ
p
(s) = (2/p)|s|
p
,
with p > 1. The non-local analogous of the p-
laplacian operator ∆
p
u is given by
DJ
NL
p
(u) =
1
4
Z
Ω
w(x −y)φ
0
p
(u(y) −u(x))dy = (8)
=
Z
Ω
w(x −y)|u(y) −u(x)|
p−2
(u(y) −u(x))dy
which is the Frechet derivative (for p > 1) of
J
NL
p
(u) =
1
2p
Z
Ω×Ω
w(x −y)φ
p
(u(y) −u(x))dydx =
(9)
=
1
2p
Z
Ω×Ω
w(x −y)|u(y) −u(x)|
p
dydx
As typical in bilateral filtering theory (Tomasi and
Manduchi, 1998) we define the w(x −y) function in
form
w(x −y) =
1
C
e
−
(|x−y|)
2
ρ
2
, (x,y) ∈ Ω ×Ω
where C is a normalizing constant.
While the corresponding local case is not to much
relevant to the image processing community because
of its regularizing effect on the solutions which pro-
vokes artificial smoothing due to elliptic regularity
theory, there is an important result of (Andreu-Vaillo
et al., 2010) which assures that, for the related non-
local diffusion case, the data and the solution space
are the same and no regularization takes efect. This
intriguing effect is due to non-local diffusion and can
be related to recent bilateral filter theory and applica-
tion.
3.2 Approximating Non-local
Non-convex Flows
When 0 < p ≤ 1 we use the already presented
φ
ε,p
−family (2). Denote x ∈ Ω as a pixel in the im-
age and y ∈ Ω as a pixel in the neighborhood N(x) of
x, u(x) and u(y) as the corresponding range values of
pixel x and y. We consider the functional
J
NL
ε,p
(u) =
1
4
Z
Ω×Ω
w(x −y)φ
ε,p
(u(y) −u(x))dxdy =
(10)
=
1
2p
Z
Ω×Ω
w(x −y)
|u(y) −u(x)|
2
+ ε
2
p/2
dxdy+
−
ε
p
2p
Z
Ω×Ω
w(x −y)dxdy
When u ≡ 0 we have u(y) = u(x) for any x,y ∈ Ω and
J
ε,p
(0) = 0. In the limit
A Non-Local Diffusion Saliency Model for Magnetic Resonance Imaging
103

lim
ε→0
J
ε,p
(u) = J
NL
0,p
(u) =
=
1
2p
Z
Ω×Ω
w(x −y)|u(y) −u(x)|
p
dxdy
which is the non-local analogous of to the energy
functional associated to the local p-laplacian operator
E
p
(u) =
1
p
Z
Ω
|∇u|
p
dx
as before the derivative of the approximated non-local
functional (10) can be formally written as
DJ
NL
ε,p
(u) =
1
4
Z
Ω
w(x−y)φ
0
ε,p
(u(y)−u(x))dy = (11)
=
Z
Ω
w(x −y)(|u(y)−u(x)|
2
+ε
2
)
p−2
2
(u(y)−u(x))dy
Using the gradient descent method to minimize the
functional J
ε,p
(u) we arrive at the evolution equation
u
t
(x,t) =
1
2
Z
Ω
w(x −y)φ
0
ε,p
(u(y,t) −u(t, x))dy
where
φ
0
ε,p
(u(y,t) −u(x,t)) =
=
|u(y,t) −u(x,t)|
2
+ ε
2
p−2
2
(u(y,t) −u(x,t))
We define the kernel
k
ε,p
(s) =
1
2
φ
0
ε,p
(s) = s
s
2
+ ε
2
p−2
2
and finally write
u
t
(x,t) = K
ε,p
(u)(x,t) = (12)
=
Z
Ω
w(x −y)k
ε,p
(u(y,t) −u(x,t))dy
which is complemented with initial data u(x,0) =
u
0
(x),x ∈ Ω. As remarked in (Andreu-Vaillo et al.,
2010), the homogeneous Neumann boundary condi-
tions are implicitly imposed by the non-local diffu-
sion operator K
ε,p
. The equation above models a non-
linear non-local non-convex p−laplacian bilateral fil-
ter. This will be used in the next section to present
final joint model for saliency detection and restora-
tion.
3.3 Proposed Model
We present the general model valid for non-local
strictly convex flows (ε = 0, p > 1) and the approxi-
mated non-local non-convex flows (ε > 0, 0 < p < 1).
We start with the analogous non-local energy func-
tional
E
ε,p
(u) = αJ
NL
ε,p
(u) +
1
α
H(u) + λF(u) (13)
Using the definitions introduced in section (2) regard-
ing the saliency and the fidelity terms, we consider the
energy functional J
NL
ε,p
(u) defined in (10). The non-
local Euler Lagrange equation reads
−
α
4
Z
Ω
w(x −y)φ
0
ε,p
(u(y) −u(x))dy+ (14)
+
1
α
h
0
(u) + λ(u − f ) = 0
and the corresponding gradient flow evolution equa-
tion is
u
t
=
α
4
Z
Ω
w(x −y)φ
0
ε,p
(u(y,t) −u(x,t))dy+ (15)
−
1
α
h
0
(u) −λ(u − f )
which is in term of kernel k
ε,p
(12)
u
t
=
α
4
Z
Ω
w(x −y)k
ε,p
(u(y,t) −u(x,t))dy+ (16)
−
1
α
h
0
(u) −λ(u − f )
4 NUMERICAL RESOLUTION
We solve the non-local p-laplacian diffusion equa-
tion (16) using the approach proposed in (Yang et al.,
2009). This is based on the quantization process
which allows to reduce diffusion term to a convolu-
tion operation over each quantized value. In fact, this
technique produces solutions in a quantized range of
values which is suitable for our proposal which is to
separate and detecting saliency (u ≈ 1) from back-
ground (u ≈ 0). Such technique allows to speed up
the bilateral non-local filtering and labeling. We then
address the main saliency detection problem with a
primal gradient descent numerical scheme.
4.1 Iterative Scheme
We briefly describe the quantization step which lin-
earizes the model Let q = (q
i
) be a quantized vector,
q ∈ R
Q
, where Q is the number of quantization lev-
els and q
i
∈{0, ...,1} are the quantized values. More-
over we denote u
k
(x) = u(x,t) for t
k
∈[(k −1)∆t,k∆t)
and then K
ε,p
(u)(x,t) = K
ε,p
(u
k
)(x). For k = 0 we de-
fine a quantized version of the given data u(x,0) =
u
0
(x) ∈ {0,...,1}. Notice that the original FLAIR im-
ages we consider have a 16 depth-bit resolution which
gives 65536 possible gray levels. For computational
purposes we reduce the date image to a 8 depth-bit
resolution corresponding to 256 values. This fix the
number of quantization levels Q = 256 and allows the
BIOIMAGING 2017 - 4th International Conference on Bioimaging
104

exact computation of the reconstructed quantized so-
lution. For each q
i
, i = 1..Q we introduce and com-
pute the functions
K
i
ε,p
(u
k
(x)) = (k
ε,p
(u
k
−q
i
) ∗w)(x) =
=
Z
Ω
w(x −y)k
ε,p
(u
k
(y) −q
i
)dy =
=
Z
Ω
w(x −y)(|u
k
(y) −q
i
|
2
+ ε
2
)
p−2
2
(u
k
(y) −q
i
)dy
where K
i
ε,p
(u
k
) = k
ε,p
(u
k
−q
i
)∗w is a convolution op-
erator. The contribution of each q
i
is then summed up
recover the effect of diffusion at any x ∈ Ω. For any x
such that u
k
(x) = q
i
we define F(u(x)) as follows
F
i
(u
k
(x)) =
(
K
i
ε,p
(u
k
(x)), if u
k
(x) = q
i
0, otherwise
so that
F(u
k
(x)) =
∑
i
F
i
(u
k
(x))
The above formalism leads to a semi-implicit scheme
(for the sake of readability we write u
k
= u
k
(x)) using
a first-order forward Euler time discretization in (16).
We have
u
k+1
= u
k
+ ∆tαF(u
k
) −∆t
δ
α
(1 −δu
k+1
)+ (17)
−∆tλ(u
k+1
− f )
Rearranging terms we have the following explicit
scheme. Given a data image f and parameters α, λ,
δ we fix ∆t and set k = 0, u
0
= f . For any k = 1..T
compute:
1 −
δ
2
α
+ λ∆t
u
k+1
= u
k
+∆t
αF(u
k
) + λ f −
δ
α
Notice that, as typical in bilateral filtering theory, the
diffusion time T is small because of the non-local dif-
fusion.
4.2 Results
Signal in MR images is high or low (bright or dark),
depending on the pulse sequence used, and the type of
tissue in the image region of interest. In this work we
present our preliminary results obtained solving the
model equation (16) when applied to a FLAIR set of
images from the BRATS2015 dataset (Menze et al.,
2014). For all tests we have fixed the parameters:
λ = 0.1, Q = 256, ρ = 20, α = 0.5, ε = 1e −6, and
for each image 1,2, 3,4, we choose δ = 2,1.5,2.5,1.5
respectively. The parameters of the numerical dis-
cretization are summarized in table (1), where ∆t is
the time discretization step, T = k∆t corresponds to
Table 1: Numerical parameters of the simulation.
p = 0.1 p = 0.5 p = 1 p = 2 p=3
∆t 0.0025 0.005 0.01 0.01 0.01
k 80 40 30 20 20
T 0.2 0.2 0.3 0.4 0.4
Table 2: Statistics for different values of p.
p = 0.1 Image Precision Recall DICE
1 0,959 0,916 0,937
2 0,964 0,909 0,936
3 0,984 0,876 0,927
4 0,973 0,887 0,928
Average 0,970 0,897 0,932
p = 0.5 Image Precision Recall DICE
1 0,895 0,955 0,924
2 0,935 0,915 0,925
3 0,974 0,878 0,923
4 0,938 0,920 0,929
Average 0,935 0,917 0,925
p = 1 Image Precision Recall DICE
1 0,862 0,958 0,908
2 0,911 0,919 0,915
3 0,956 0,901 0,928
4 0,932 0,932 0,932
Average 0,915 0,928 0,921
p = 2 Image Precision Recall DICE
1 0,854 0,959 0,903
2 0,868 0,924 0,895
3 0,932 0,911 0,921
4 0,898 0,935 0,916
Average 0,888 0,932 0,909
p = 3 Image Precision Recall DICE
1 0,853 0,959 0,903
2 0,835 0,930 0,880
3 0,926 0,912 0,919
4 0,857 0,939 0,896
Average 0,868 0,935 0,900
the total diffusion time and k is the number of itera-
tions. The results are summarized in table (2) where
we used the typical statistics and performance metrics
for saliency and segmentation: Accuracy, Sensitivity,
Specificity, G-mean, Precision, Recall and DICE. In
all cases the results are very promising and show the
successful application of the method, as indicated by
the DICE coefficient, is associated to small values of
p. In the non-convex case, the Precision is higher than
the Recall, and in the convex case it is exactly the op-
posite. The accuracy is in all cases extremely high.
A Non-Local Diffusion Saliency Model for Magnetic Resonance Imaging
105
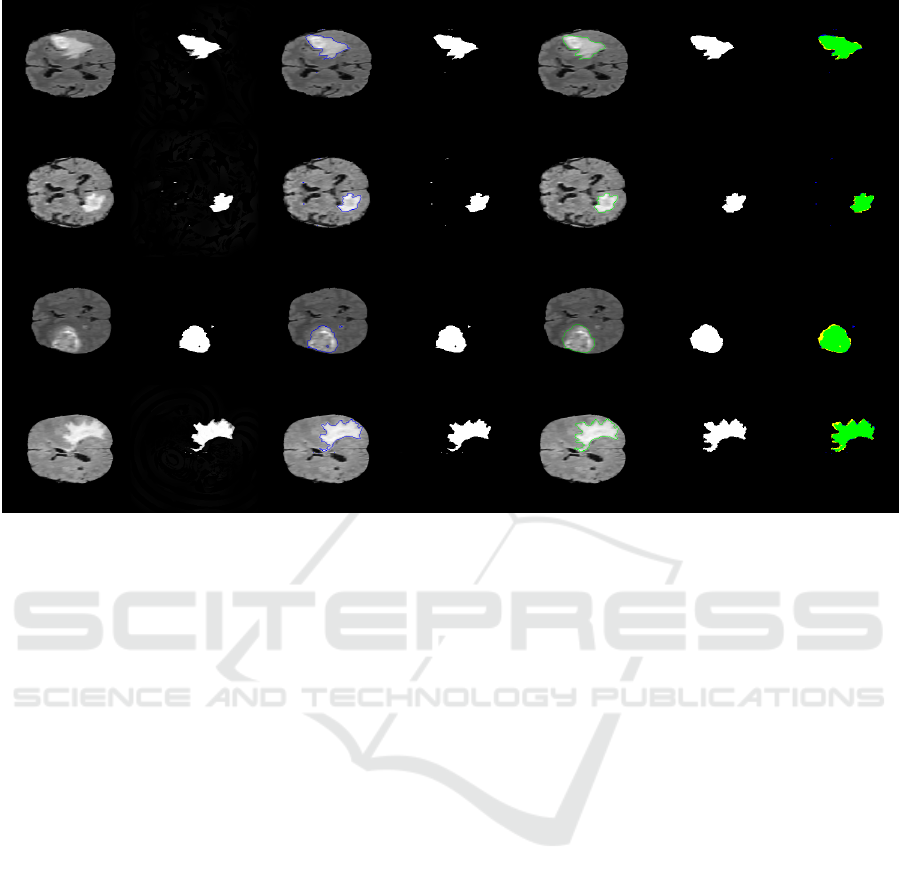
Figure 2: Four FLAIR candidates from BRATS2015 data-set (Menze et al., 2014) (rows). From left to right (columns):
original image, output image, perimeter of the segmentation of the output image, output binary mask, perimeter of the ground
truth, ground truth segmentation, ground truth and output binary mask overlap (TP-green, TN-black, FP-blue, FN-yellow).
5 CONCLUSIONS
In this work we have presented a new non-local non-
convex diffusion model for saliency detection and la-
beling which has shown to be able to perform a fast
foreground detection when it is applied to a FLAIR
given image. The results reveal that this method
can achieve very high accurate statistics metrics over
the ground-truth BRATS2015 data-set (Menze et al.,
2014). Also, as a by-product of the model, the so-
lution has, after few iterations, a reduced number
of quantized values making simpler the final thresh-
olding step. Such a technique could be improved
computationally by observing that the diffusion pro-
cess combined with the saliency term evolves produc-
ing more cartoon like piece-wise constant solutions
which can be coded with less number of quantization
values while converging to a binary mask. This is re-
lated to the absorption-reaction balance in the PDE
where absorption is active where the solution is small
and the reaction is active where u ≈1. The non-local
diffusion properties of the model also allow to de-
tect salient objects which are not spatially close and
connected regions (disjoint areas). This can be use-
ful in many other medical images modalities, spe-
cially in functional MRI (fMRI). Non-convex prop-
erties, meanwhile, promote sparse non-local gradi-
ent, pushing the solution to a cartoon piece-wise con-
stant image. Both characteristics combined with our
proposed concave energy term results in a promising
accurate and fast technique suitable to be applied to
FLAIR images and others MRI modalities.
ACKNOWLEDGMENTS
This research has been partially supported by
the Spanish Government research funding ref.
MINECO/FEDER TIN2015-69542-C2-1 and the
Banco de Santander and Universidad Rey Juan Car-
los Funding Program for Excellence Research Groups
ref. Computer Vision and Image Processing (CVIP).
REFERENCES
Ambrosio, L., Fusco, N., and Pallara, D. (2000). Functions
of bounded variation and free discontinuity problems.
Oxford university press.
Andreu-Vaillo, F., Maz
´
on, J. M., Rossi, J. D., and Toledo-
Melero, J. J. (2010). Nonlocal diffusion problems, vol-
ume 165. American Mathematical Society.
Aubert, G., Aujol, J.-F., and Blanc-F
´
eraud, L. (2005).
Detecting codimensiontwo objects in an image with
BIOIMAGING 2017 - 4th International Conference on Bioimaging
106

ginzburg-landau models. International Journal of
Computer Vision, 65(1-2):29–42.
Aubert, G. and Kornprobst, P. (2006). Mathematical prob-
lems in image processing: partial differential equa-
tions and the calculus of variations, volume 147.
Springer Science & Business Media.
Banerjee, S., Mitra, S., Shankar, B. U., and Hayashi, Y.
(2016). A novel gbm saliency detection model using
multi-channel mri. PloS one, 11(1):e0146388.
Bylinskii, Z., Judd, T., Borji, A., Itti, L., Durand, F., Oliva,
A., and Torralba, A. Mit saliency benchmark.
Chambolle, A. (2004). An algorithm for total variation min-
imization and applications. Journal of Mathematical
imaging and vision, 20(1-2):89–97.
Chambolle, A. and Lions, P.-L. (1997). Image recovery via
total variation minimization and related problems. Nu-
merische Mathematik, 76(2):167–188.
Charbonnier, P., Blanc-F
´
eraud, L., Aubert, G., and Barlaud,
M. (1997). Deterministic edge-preserving regulariza-
tion in computed imaging. IEEE Transactions on im-
age processing, 6(2):298–311.
Gilboa, G. and Osher, S. (2008). Nonlocal operators with
applications to image processing. Multiscale Model-
ing & Simulation, 7(3):1005–1028.
Harel, J., Koch, C., and Perona, P. (2006). Graph-based vi-
sual saliency. In Advances in neural information pro-
cessing systems, pages 545–552.
Hinterm
¨
uller, M. and Wu, T. (2014). A smoothing descent
method for nonconvex tvˆ q-models. In Efficient Algo-
rithms for Global Optimization Methods in Computer
Vision, pages 119–133. Springer.
Li, M., Zhan, Y., and Zhang, L. (2013). Nonlocal variational
model for saliency detection. Mathematical Problems
in Engineering, 2013.
Liu, R., Cao, J., Lin, Z., and Shan, S. (2014). Adaptive par-
tial differential equation learning for visual saliency
detection. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
3866–3873.
Liu, Z., Meur, L., and Luo, S. (2013). Superpixel-based
saliency detection. In 2013 14th International Work-
shop on Image Analysis for Multimedia Interactive
Services (WIAMIS), pages 1–4. IEEE.
Menze, B., Jakab, A., Bauer, S., Kalpathy-Cramer, J., Fara-
hani, K., Kirby, J., Burren, Y., Porz, N., Slotboom,
J., Wiest, R., Lanczi, L., Gerstner, E., Weber, M.-
A., Arbel, T., Avants, B., Ayache, N., Buendia, P.,
Collins, L., Cordier, N., Corso, J., Criminisi, A., Das,
T., Delingette, H., Demiralp, C., Durst, C., Dojat, M.,
Doyle, S., Festa, J., Forbes, F., Geremia, E., Glocker,
B., Golland, P., Guo, X., Hamamci, A., Iftekharud-
din, K., Jena, R., John, N., Konukoglu, E., Lashkari,
D., Antonio Mariz, J., Meier, R., Pereira, S., Pre-
cup, D., Price, S. J., Riklin-Raviv, T., Reza, S., Ryan,
M., Schwartz, L., Shin, H.-C., Shotton, J., Silva, C.,
Sousa, N., Subbanna, N., Szekely, G., Taylor, T.,
Thomas, O., Tustison, N., Unal, G., Vasseur, F., Win-
termark, M., Hye Ye, D., Zhao, L., Zhao, B., Zikic,
D., Prastawa, M., Reyes, M., and Van Leemput, K.
(2014). The Multimodal Brain Tumor Image Segmen-
tation Benchmark (BRATS). IEEE Transactions on
Medical Imaging, page 33.
Rudin, L. I., Osher, S., and Fatemi, E. (1992). Nonlinear to-
tal variation based noise removal algorithms. Physica
D: Nonlinear Phenomena, 60(1):259–268.
Rueda, A., Gonz
´
alez, F., and Romero, E. (2013).
Saliency-based characterization of group differences
for magnetic resonance disease classification. Dyna,
80(178):21–28.
Samson, C., Blanc-F
´
eraud, L., Aubert, G., and Zerubia, J.
(1998). Image classification using a variational ap-
proach. PhD thesis, INRIA.
Thota, R., Vaswani, S., Kale, A., and Vydyanathan, N.
(2016). Fast 3d salient region detection in medical im-
ages using gpus. In Machine Intelligence and Signal
Processing, pages 11–26. Springer.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In Computer Vision, 1998.
Sixth International Conference on, pages 839–846.
IEEE.
Wang, Y., Liu, R., Song, X., and Su, Z. (2014). Saliency
detection via nonlocal l {0} minimization. In Asian
Conference on Computer Vision, pages 521–535.
Springer.
Weickert, J. (1998). Anisotropic diffusion in image process-
ing, volume 1. Teubner Stuttgart.
Yang, Q., Tan, K.-H., and Ahuja, N. (2009). Real-time o
(1) bilateral filtering. In Computer Vision and Pattern
Recognition, 2009. CVPR 2009. IEEE Conference on,
pages 557–564. IEEE.
Zhan, Y. (2011). The nonlocal-laplacian evolution for im-
age interpolation. Mathematical Problems in Engi-
neering, 2011.
A Non-Local Diffusion Saliency Model for Magnetic Resonance Imaging
107
