
Architecture Descriptions of Software Systems: Complex Connectors vs
Realisability
Mert Ozkaya
Istanbul Kemerburgaz University, Istanbul, Turkey
Keywords:
Architectural Languages, Interaction Protocols, Realisability.
Abstract:
With the advent of software architectures, architectural languages have become an active research area for the
specification of software architectures in terms of components & connectors and for some extra capabilities
such as formal analysis and code generation. In this paper, the existing architectural languages have been
analysed for two important language features - i.e., interaction protocols and realisability. The analysis results
show that only a few languages support interaction protocols via their first-class connector elements (also
referred to as complex connectors). However, complex connectors of those languages lead to unrealisable
specifications due to enabling global constraints which may not be possible for distributed systems. Therefore,
practitioners cannot implement the system in the way specified, and any analyses (e.g., performance) made on
the unrealisable specifications will all be invalid.
1 INTRODUCTION
Software architecture (Clements et al., 2003; Perry
and Wolf, 1992; Garlan and Shaw, 1994) has been
proposed in the early nineties as a high-level design
method for specifying software systems in terms of
components and their relationships (i.e., connectors).
Since then, many architectural languages (ALs) have
been developed through which software architectures
can be specified at varying levels of abstractions and
further used for some useful operations such as formal
analysis and code generation.
According to the recent analyses (Lago et al.,
2015; Malavolta et al., 2012), there are approxi-
mately 120 known ALs
1
. These ALs can be either
UML-like languages, architecture description lan-
guages (ADLs), and formal specification languages.
UML-like languages derive from UML (Rumbaugh
et al., 2005) , which is an informal modelling lan-
guage that offers a visual (i.e., diagrammatic) no-
tation set for designing software systems including
architectural design. ADLs (Medvidovic and Tay-
lor, 2000) are precise languages that are exclusively
used for architectural design. ADLs can be either
general-purpose (used for any systems) or domain-
specific. General-purpose ADLs are useful for the
1
The list of ALs can be accessible here: https://sites.
google.com/site/ozkayamert1/als
high-level specifications and their formal analysis to
detect high-level design errors such as deadlocking
components. Domain-specific languages are better
for detailed specifications of systems in particular do-
mains which can then be used for, e.g., implementa-
tion generation. Formal specification languages (e.g.,
ProMeLa (Holzmann, 2004) and FSP (Magee et al.,
1997)) are based on formal syntax and semantics (i.e.,
mostly algebraic), which enable the exhaustive for-
mal analysis of architectural models. Given so many
ALs with different scopes and capabilities, one might
expect ALs to be so popular among practitioner in
industry. However, this has never been the case -
ALs remain in the focus of research communities only
(Malavolta et al., 2012; Ozkaya, 2016b). As stated in
(Malavolta et al., 2012), there are very few ALs, such
as UML (Rumbaugh et al., 2005) and AADL (Feiler
et al., 2006), which practitioners prefer in their ar-
chitectural modelling. Most ALs are either (i) used
by expert practitioners who have deep knowledge and
experience in architectural modelling or (ii) used for
research purposes only.
Lago etal (Lago et al., 2015) proposed a frame-
work for classifying ALs on a set of requirements
that are grouped as language definition, language fea-
tures, and tool support (Lago et al., 2015). Language
definition is concerned with the syntax and semantics
of languages, e.g., support for first-class components
and connectors. Language features are concerned
382
Ozkaya M.
Architecture Descriptions of Software Systems: Complex Connectors vs Realisability.
DOI: 10.5220/0006139503820391
In Proceedings of the 5th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2017), pages 382-391
ISBN: 978-989-758-210-3
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

with the capabilities of languages in specifying soft-
ware architectures, e.g., support for multiple view-
points and extensibility. Tool support is mainly to do
with formal analysis and implementation code gener-
ation facilities. Inspired from Lago etal’s classifica-
tion framework, I analysed the existing 120 ALs for
a number of requirements (Ozkaya, 2016a). My anal-
ysis sheds light into many interesting issues that may
have been ignored by the language designers which
may however affect the practical use of the languages.
In this paper, I focus on two key requirements, i.e.,
component & connector view and realisability, which
I believe are highly important for the practical use of
the languages by practitioners. Components & con-
nectors view separates high-level complex interaction
mechanisms (i.e., interaction protocols) from compo-
nents’ computations and considers them as connec-
tors. Note that connectors encapsulating interaction
protocols are referred to as complex connectors in the
rest of the paper. Realisability is, informally, the ca-
pability of implementing a software system in exactly
the same way as its software architecture specifica-
tion. That is, the implemented system is expected to
have the same components that behave and interact in
the same way. The goal of this paper is to analyse the
existing languages for these two key requirements and
discuss the relationship between complex connectors
and realisability.
In the rest of the paper, languages’ support for
complex connectors (i.e., interaction protocol) is dis-
cussed firstly. This is then followed by the discus-
sion of the realisability of the languages. Lastly, the
relationship between supporting complex connectors
and guaranteeing the realisability of software archi-
tectures is discussed.
2 COMPLEX CONNECTOR
SUPPORT
To describe complex connectors, one should start
from one of the best regarded definition of software
architecture made by Garlan and Shaw (Garlan and
Shaw, 1994): an architecture of a specific system is
treated as a collection of computational components
– or simply components – together with a descrip-
tion of the interactions between these components –
the connectors. So, while components are the units
of computations, connectors in software architectures
represent the units of interactions for the compo-
nents. A connector can be as simple as communica-
tion links through which components exchange syn-
chronous/asynchronous messages among each other.
Procedure call and event-broadcasting are some fa-
miliar examples of simple connectors, which simply
describe the style of communications. A complex
connector also deals with the constraints on the way
the communicating components interact with each
other, which is also known as the protocols of in-
teractions. An interaction protocol (Kloukinas and
Ozkaya, 2012) essentially describes for a set of com-
municating components the order of messages that the
components exchange so as to be composed together
to a successful system.
Specifying software architectures in terms of com-
ponents and complex connectors enhances the modu-
larity and thus the practical use of the languages. First
of all, architectural designs will be more understand-
able as one can easily distinguish between the com-
putation (i.e., components) and interaction (i.e., com-
plex connectors). Modularity also aids in the analy-
sis of software architectures. Indeed, detecting any
design errors due to wrong (e.g., deadlocking) inter-
action protocols that hinder the composition of sys-
tem components or wrong computations of compo-
nents will be easier since the computations and in-
teraction protocols are cleanly separated. Moreover,
finding out the optimum design decisions will be eas-
ier too as components can easily be re-used and ex-
perimented with different interaction protocols.
In the rest of this section, the languages are evalu-
ated for their complex connector (i.e., interaction pro-
tocols) support. Each language is taken into consid-
eration in terms of their support for components and
complex connectors. However, due to the space re-
striction, only the most well-known languages (i.e.,
most cited by industry and academia) are considered
herein that have inspired many of the existing lan-
guages today. The full list of ALs can be found in
(Ozkaya, 2016a).
Wright. (Allen and Garlan, 1997). A component
type in Wright is specified with interfaces and a com-
putation. A component interface can operate as many
actions as desired in its environment. A component
computation is used (optionally) to specify either (i) a
configuration of component and connector instances,
or, (ii) a protocol for coordinating the interface be-
haviours.
Connector Support. In Wright, besides first-class
component elements, connectors are also first-class
elements, thus enabling the explicit specification of
interactions among components. Indeed, one can de-
scribe with Wright connectors either simple intercon-
nection mechanisms (e.g., procedure call) or complex
ones (e.g., complex interaction protocols such as an
auction).
Connectors in Wright are instantiated from con-
Architecture Descriptions of Software Systems: Complex Connectors vs Realisability
383

nector types, which enables reuse of the same interac-
tion pattern on different contexts and also the analysis
of connectors in isolation. A connector type is de-
scribed with roles representing the participating com-
ponents and a glue coordinating the behaviour of the
roles. Roles and glue are each specified with a proto-
col representing their behaviours.
C2. (Medvidovic et al., 1996; Taylor et al., 1996).
A component type in C2 is specified with an interface
and a computation. A component interface specifica-
tion is two-fold: a top_domain and a bottom_domain.
The top_domain represents requests, which are emit-
ted by the component, and notifications, which it
reacts to. The bottom_domain represents requests,
which can be received, and notifications, which can
be sent. For a component computation, it comprises
a set of methods, representing the inner functionality
of the component, and a behaviour part, coordinating
the calls made to these methods.
Connector Support. C2 does not allow for spec-
ifying complex interaction mechanisms. However, it
offers a connector element that can either route event
messages between components or broadcast messages
from a component to multiple components. Connec-
tors allow also the filtering of messages via a set of
built-in policies, i.e., no filtering, notification filter-
ing, prioritised, and message sink.
A connector is specified with roles consisting of
top- and bottom-domains, which are used to specify
the components it connects together.
Moreover, connectors in C2 are specified as part
of the architecture element, which is used to specify
a configuration of components and connectors for a
system. So unlike Wright connectors, C2 connectors
cannot be specified as abstractions and re-used in dif-
ferent configurations. Within the body of architec-
ture, the style of the connector is specified that de-
scribes its policies for message filtering. Then, in its
architecture_topology, the bottom and top domains of
the connector are associated with components.
Darwin. (Magee and Kramer, 1996). Darwin is
one of the first architecture description languages, in-
tended as a general-purpose language for specifying
distributed systems as configurations of components.
In Darwin, software architectures are specified in
terms of hierarchical components. Component types
in Darwin are specified with interfaces they provide
to their environment and require from them too. Each
interface of a component is responsible for the com-
munication of a single message.
Connector Support. Darwin does not support the
specification of connectors in architectural designs.
Components interact with each other through bind-
ings specified in composite component types. How-
ever, bindings cannot describe the way interaction oc-
curs between components, thus resulting in the pro-
tocols of interactions being hard-wired inside com-
ponents. This not only overcomplicates component
specifications but also reduces their re-usability and
hampers the architectural evaluation of different can-
didate interaction protocols.
Rapide. (Luckham, 1996). A component type in
Rapide is specified with interfaces, which serve for ei-
ther asynchronous (observing and generating events)
or synchronous communication (providing and re-
quiring functions). Each interface consists of actions
that represent asynchronous events or synchronous
functions. An interface also include behaviour spec-
ifications, representing the external behaviours of the
components.
Connector Support. Like Darwin, Rapide adopts
an approach that considers system architectures as
collections of components which are wired together
via mere connections. So, unlike Wright, there is
no first-class connector element offered, leading com-
plex interaction patterns to be implicitly specified in
component specifications.
On the other hand, Rapide introduces architec-
tural constraints, through which global interaction
protocols for the interacting components can be spec-
ified. But, unlike Wright, where connectors are inde-
pendent elements, Rapide constraints are embedded
within an architecture specification, and thus cannot
be re-used in different architecture specifications.
MetaH. (Binns et al., 1996). Unlike other ADLs
introduced so far, MetaH does not allow designers to
specify their own component types. Instead, a set of
low-level pre-defined types are offered. Software ar-
chitectures are specified with subprogram and pack-
ages component types, while hardware architectures
with monitor, memory, process, channel, and device
types. Designers can use the pre-defined component
types and include interfaces inside their component
type specifications. Interfaces herein are first-class
elements in MetaH that are specified externally and
then used in component specifications. Finally, the
computations of components are specified as a col-
lection of attributes, which are used to describe the
non-functional requirements, e.g., schedulability and
reliability details of components.
MetaH offers additional component types (i.e.,
modes and macros) for specifying the configuration
of components.
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
384

Connector Support. MetaH does not offer first-class
connectors. Connectors are viewed as connection
links, which are used in configuration components to
connect the interfaces of their sub-components.
UniCon. (Shaw et al., 1995). Component types in
UniCon can be either primitive or composite. Ev-
ery component is specified with a type, which is cho-
sen among the pre-defined types offered by UniCon.
(e.g., sharedData, process, and filter). These pre-
defined types determine the interface of the compo-
nents, i.e., its actions (named as players in UniCon).
Note that UniCon also has a general component type,
allowing designers to specify generic types without
any restriction on interfaces. A primitive component
type can also include implementation details (e.g., lo-
cation of source code).
Connector Support. Connector types in UniCon are
introduced as first-class elements. A connector type
is specified with an interaction protocol, acting as a
mediator of interaction among components. Protocols
herein, just like Wright connectors, consist essentially
of roles. However, unlike Wright, UniCon restricts
protocols to be of certain types, e.g., Pipe, DataAc-
cess, and ProcedureCall, thus preventing designers
from freely specifying their own (complex) types.
Koala. (van Ommering et al., 2000). As in Darwin,
system architectures in Koala are specified in terms of
components. However, unlike Darwin, Koala offers
first-class interface elements, encapsulating methods.
So, interfaces are then employed within components,
which either require or provide their methods.
Component types in Koala can also be com-
posite by including a computation (i.e., a configu-
ration of components). Koala introduces contains
and connects constructs (corresponding to inst and
bindings in Darwin respectively) for specifying the
configuration of components in composite types.
Connector Support. Like Darwin, Koala does not sup-
port connectors in system architectures either. Inter-
actions between components are merely specified by
connects in composite component types. Being sim-
ple links, these cannot be used to specify complex
interaction protocols independently of components.
Nevertheless, as aforementioned, Koala offers mod-
ule, which can be employed in a composite compo-
nent and connected with the interfaces of the interact-
ing sub components to order their the method-calls.
So, modules in Koala can be used to specify interac-
tion protocols for components.
COSA. (Oussalah et al., 2004). Component types
in COSA are specified with interfaces and a com-
putation. Furthermore, a component type can in-
clude properties for specifying non-functional prop-
erties and a constraint, which is again a property that
is used to specify certain policies to be met by the
components.
While components can be composite too, consist-
ing of component and connector instances, COSA
also offers first-class instance elements for specifying
configurations of components and connectors.
Connector Support. COSA offers first-class con-
nector types, which are specified with a collection
of roles for participating component interfaces and
a glue for representing a global interaction protocol.
Designers can also specify some other interaction de-
tails as part of connectors, such as the type of connec-
tions or the mode of connections. While the connec-
tion types can be either communication, conversion,
coordination, or facilitation, the connection-mode can
be synchronous or asynchronous connections.
COSA also introduces composite connector types.
A composite connector is specified via a glue element,
with which designers can specify a configuration of
component and connector instances. So with COSA,
it is possible to specify complex connectors modu-
larly, by re-using the existing component and connec-
tor type instances.
XADL. (Dashofy et al., 2002). XADL provides the
very basic elements for an architecture description in
terms of XML schemas. These basic schemas can be
extended to new schemas by adding/removing new
features, which enables the creation of specific con-
structs fitting better the designers own needs. XADL
offers a design-time schema, which can be used by
designers to specify their software architectures. The
design-time schema includes the commonly used ar-
chitectural constructs, e.g., component, connector, in-
terface, and link, and allows designers to specify basic
information about them, e.g., their id, description, and
type. So, designers can use the design-time schema
to specify their component types with their type, de-
scription, and interface(s). However, if the existing
features of the construct are not enough, designers
can extend the design-time schemas and add features
meeting their particular needs. Indeed, designers can
add features for specifying behaviours in some for-
malisms, e.g., Wright’s interface protocols.
Connector Support. Just like component types, con-
nector types are also supported by the design-time
schema, specified with type, description, and inter-
face(s). So, designers can either use its connector
construct as it is or extend it to add extra features,
e.g., Wright’s complex connector.
Architecture Descriptions of Software Systems: Complex Connectors vs Realisability
385

CONNECT. (Issarny et al., 2011). Components are
simply specified with interfaces representing the be-
haviours of the components in their interaction with
their environment.
Connector Support. Just like Wright connectors,
connectors in CONNECT are specified with roles and
a glue, where the roles represent the participating
components (namely their interfaces) and the glue
represents their coordination.
LEDA. (Canal et al., 1999). Component types in
LEDA are specified either as primitive or composite.
Regardless of being primitive or composite, a com-
ponent type is specified with interfaces and computa-
tion (i.e., optional). An interface is a first-class ele-
ment, which, once specified, can then be used exter-
nally in component specifications to describe their in-
teraction points. Computation of components is spec-
ified as a protocol, which coordinates the interface be-
haviours. Moreover, composite component types fur-
ther include composition and attachments, represent-
ing its computation as a configuration of components.
Connector Support. Like Darwin, LEDA does not
support connectors either. Indeed, its only interac-
tion mechanism is the simple attachments, specified
within composite component types for linking the
component interfaces. Complex interaction mecha-
nisms (i.e., interaction protocols) can only be speci-
fied as part of components, which makes components
less re-usable and protocol dependent.
SOFA. (Plasil and Visnovsky, 2002; Bures et al.,
2006). A component type in SOFA is specified with
component frame and a computation. A component
frame represents the external view of a component
type that consists of required (requires) or provided
(provides) interfaces. It should be noted that these
interfaces are essentially the instances of interface ab-
stractions that are specified externally as first-class el-
ements. For component computations, they are speci-
fied for composite components and consist of compo-
nent instances and connection links between required
and provided interfaces of these component instances.
Connector Support. SOFA offers pre-defined basic
interaction mechanisms, i.e., procedure call, messag-
ing, streaming, and blackboard (Bures and Plasil,
2004). So, designers can specify their component
interactions using these basic interactions. More-
over, SOFA allows designers to specify their own
connectors too. It provides connector generation
tools, through which designers can choose any of the
pre-defined interaction mechanisms and specify some
non-functional properties for these mechanisms (Ga-
lik and Bures, 2005; Bures, 2005). Nevertheless, it
is not possible to specify complex interaction mech-
anisms (i.e., interaction protocols) for the interact-
ing components via the connectors (and the tools) in
SOFA.
RADL. (Reussner et al., 2003). Component types
can be either basic or composite. Basic types are spec-
ified with interfaces. An interface can be either pro-
vided, offering methods to their environment, or re-
quired, making method-calls. Note however that un-
like other ADLs, RADL constrains each basic type to
have at least one required and one provided interfaces.
Composite component types are specified with
interfaces and also a computation. A computation
herein describes a configuration of sub component in-
stances whose interfaces are connected to each other
via bindings. Besides bindings, RADL offers map-
pings too, which allows an interface of a sub compo-
nent to be connected with an interface of the compos-
ite component (if both interfaces have the same type).
Connector Support. Like Darwin, RADL does not of-
fer first-class connector elements. One can only spec-
ify simple communication links via bindings to con-
nect sub components of composite component types.
However, complex interaction protocols for their sub
components cannot be specified explicitly.
AADL. (Feiler et al., 2006). Just like MetaH,
AADL does not provide a generic type for specifying
component abstractions. Instead, component types
are categorised into three groups, each consisting of
a collection of component types which can be instan-
tiated by designers to specify their system architec-
tures. For specifying a software architecture, compo-
nent types can be either (i) thread, (ii) thread group,
(iii) process, (iv) data, or (v) subprogram. For spec-
ifying a hardware architecture, component types can
be (i) processor, (ii) memory, (iii) device, or (iv) bus.
Lastly, for specifying composite units of the above-
mentioned components, component type can then be
a system type only.
Component types under these categories are es-
sentially specified with interfaces. A component in-
terface has either ports or subprogram calls, where
ports serve for asynchronous events and data com-
munications, and, subprogram calls for two-way syn-
chronous method communications. A component
type in AADL can also include the (i) extends func-
tionality for inheriting from other types and (ii) prop-
erties functionality for specifying non-functional re-
quirements. Furthermore, component types can have
a computation that is specified with (i) subcompo-
nents, (ii) calls and connections to specify interac-
tions between subcomponents, (iii) extends to inherit
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
386

from another implementation, and (iv) properties to
specify non-functional requirements for the subcom-
ponents.
Connector Support. AADL does not offer first-class
connector elements. However, it provides a pre-
defined collection of interaction mechanisms: (i) port
connections, (ii) component access connections, (iii)
subprogram calls, and, (iv) parameter connections.
Port connections are concerned with the interac-
tions through component ports by sending or receiv-
ing data/events asynchronously. Component access
connections are employed when a shared data is to be
accessed by components. As to subprogram calls and
parameter connections, they relate to synchronous in-
teraction between components through subprogram
calls.
Archface. (Ubayashi et al., 2010). Archface is in-
spired from Aspect Oriented Programming (Kiczales
and Hilsdale, 2001), offering notations for e.g., point-
cut and advice. A component is specified with inter-
faces, each representing a single method of commu-
nication that is either required from the component
environment or provided to its environment. Further-
more, component specifications can include point-
cut declarations for the interface methods, such as
“call (method call), execution (method execution),
and cflow (control flow)”.
Composite components are not supported by
Archface. Configurations of components are speci-
fied via the architecture construct.
Connector support Connectors in Archface are
first-class elements, which are specified as a collec-
tion of connections between the required and pro-
vided interfaces of some interacting components.
Each connection has an advice that is specified for
the provided method of the connection. The ad-
vice for the provided method describes that when-
ever the pointcut of the provided method is satis-
fied, this is followed by the inter-connected required
method whose pointcut is expected to be satisfied sub-
sequently. Note however that complex interaction
protocols for components (i.e., the order of method-
calls or method executions) cannot be specified using
Archface connectors.
3 REALISABILITY
The issue of realisability essentially originates from
the work of Allen and Garlan on formalising connec-
tors (Allen and Garlan, 1997). They define the ar-
chitectural connectors in terms of (i) roles and (ii)
a glue. A role is defined for each component that
P2UR NAP1
inc
inc
double
double
MSC1 MSC2
P2UR NAP1
inc
inc
double
double
Figure 1: A nuclear power plant’s (unrealisable) MSCs
(Alur et al., 2003).
P2UR NAP1
inc
double
double
inc
Figure 2: An unavoidable bad behaviour in the nuclear plant
(Alur et al., 2003).
the connector coordinates; and it describes the inter-
action behaviour of the component in terms of a se-
quence of messages sent/received. The glue of a con-
nector choreographs the component role behaviours
by describing a global sequence(s) of messages sen-
t/received by the components. However, software ar-
chitectures with global constraint specifications (i.e.,
the glue) may not always be realised in the same way
it is specified (i.e., with the same components, their
behaviours, and their configuration). This is because
global constraints cannot be imposed on distributed
system components in reality as the distributed com-
ponents are autonomous entities and can only observe
their own local states - the global system state is un-
known to them. To realise the global constraint spec-
ifications during implementation, one will possibly
need to use a controller that controls the distributed
component behaviours to ensure the global constraint.
This will however turn the distributed system into a
centralised one and violate the design decisions spec-
ified for the distributed nature of the system and in-
validate any analyses made over the design decisions.
To illustrate realisability, consider the Nuclear
Power Plant system (Alur et al., 2003), which con-
sists of two clients (P1 and P2) whose goal is to ac-
cess and modify the Nitric Acid (NA) and Uranium
(UR) data controlled by the nuclear power plant. In
the plant, the quantities of UR and NA need to be the
same at all times. The clients P1 and P2 respectively
increase and double these quantities and to ensure the
plant’s safety they need to strictly follow the protocol
described by the message sequence charts of Figure 1.
However the protocol in Figure 1 was proved to be
Architecture Descriptions of Software Systems: Complex Connectors vs Realisability
387
Table 1: The ALs that
ignore complex connectors
(Note: * represents the lan-
guages that use some other
notations for specifying in-
teraction protocols).
Architectural
Languages
C2
Darwin
Rapide*
MetaH
UniCon
Koala*
LEDA
SOFA*
RADL
AADL
Archface
Table 2: The ALs that sup-
port complex connectors.
Architectural
languages
Wright
COSA
XADL
CONNECT
unrealisable. It cannot be realised in a decentralised
manner so that bad behaviours like the one in Figure 2
are avoided (Alur et al., 2003).
Nevertheless, Allen and Garlan’s approach for ar-
chitectural connectors defined in the nineties may
have inspired many other languages in their defini-
tion of connectors, or more generally component in-
teractions. Table 1 and Table 2 show respectively the
analysed languages in Section 2 that have been find
out to ignore complex connectors and support com-
plex connectors. Due to the space restriction again, I
focus on these ALs for realisability, especially those
that support the specification of interaction protocol
constraints using complex connectors or another no-
tation.
Wright. Allen and Garlan has used their connector
definition in their Wright architecture description lan-
guage (Allen and Garlan, 1997). So, software archi-
tecture specifications in Wright may not be realisable
in distributed cases due to the allowance for the global
constraints via the connectors.
XADL. Realisability may be a concern for XADL
(Dashofy et al., 2002) when an extended schema
adopts the features of connector-centric ADLs such
as Wright. If an extended form of connector types al-
lows for a glue construct to coordinate the behaviours
of the components, this would naturally lead to poten-
tial unrealisability.
COSA. Like Wright, COSA (Oussalah et al., 2004)
enforces a glue in connector specifications, through
which protocols of interaction among components are
specified. Thus, COSA too allows potentially unreal-
isable specifications.
CONNECT. Just like Wright specifications, CON-
NECT (Issarny et al., 2011) specifications are poten-
tially unrealisable due to the requirement for a glue in
connector specifications.
Rapide. Rapide (Luckham, 1996) offers architec-
tural constraints, which are essentially global con-
straints imposed on the interaction of the components
within architecture specifications. These constraints
are intended to coordinate the actions taken by the
components, ensuring their compliance to particular
global ordering of actions. Therefore, Rapide archi-
tectural constraints serve just as Wright glues and al-
low potentially unrealisable specifications.
Koala. In Koala (van Ommering et al., 2000), the
modules specified within composite components act
as glues, coordinating the sub components of the com-
posite components. So, this can cause unrealisable
specifications if the sub components are distributed.
SOFA. In SOFA (Plasil and Visnovsky, 2002; Bu-
res et al., 2006), the protocol behaviour of a compo-
nent computation can essentially impose a global con-
straint on the configuration of components. As afore-
mentioned, global constraints lead to system specifi-
cations that cannot always be realised in a distributed
manner.
4 DISCUSSIONS & CONCLUSION
Software architectures have been so popular since the
nineties as a high-level design method for specifying
software systems in terms of components and their
relationships (i.e., connectors). Since then, there has
been an ever-increasing attempt towards developing
architectural languages. Today, there are more than
120 known architectural languages (ALs) for specify-
ing software architectures at varying levels of details
and then performing many useful operations such as
formal analysis and implementation code generation
(Ozkaya, 2016a). However, ALs did not gain the ex-
pected momentum unfortunately, and most of them
remain unused by the practitioners in industry (Mala-
volta et al., 2012; Ozkaya, 2016b).
To better understand the ALs and compare them
with each other, I analysed the existing 120 languages
for a set of language requirements determined by
Lago etal (Lago et al., 2015), which are grouped as
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
388
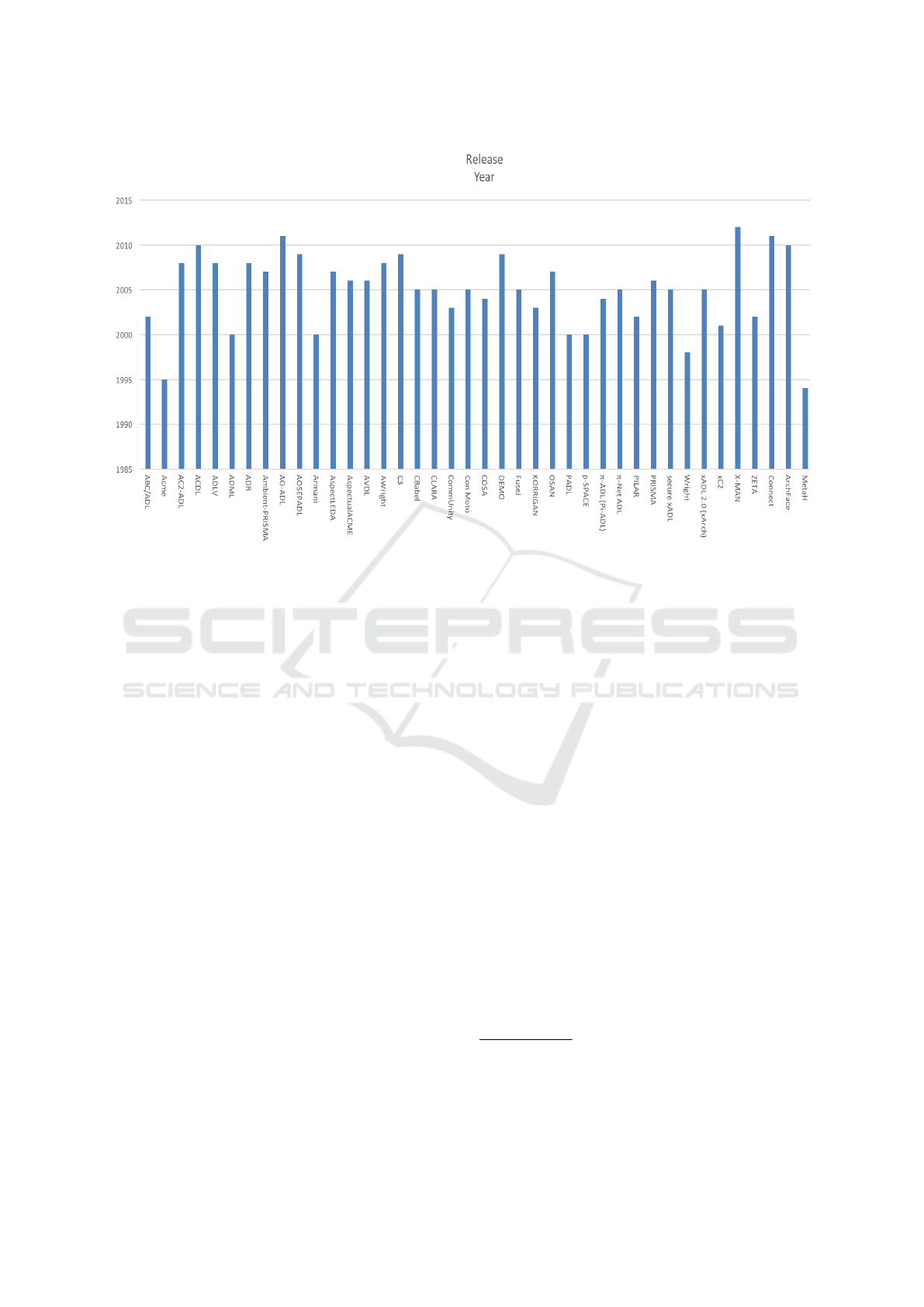
Figure 3: The ALs that support complex connectors.
language definition, language features, and tool sup-
port. The analysis results (Ozkaya, 2016a) showed
for each AL the level of support provided for the
language requirements in question and the relation-
ships between the requirements. In this paper, I fo-
cus on two of the requirements analysed, which are
(i) complex connector support (i.e., interaction pro-
tocols) and (ii) the realisability of software architec-
tures. By doing so, the goal is to determine whether
the existing ALs allow for the realisable specification
of software architectures in terms of first-class com-
ponents and complex connectors (i.e., interaction pro-
tocols).
Among the 120 ALs I analysed, only 37 of them
depicted in Figure 3 support complex connectors
through which interaction protocols can be separated
from components. The rest of the languages in
(Ozkaya, 2016a) either (i) ignore interaction proto-
cols or (ii) allow designers to inject interaction pro-
tocols within component specifications. However, ig-
noring interaction protocols can lead to architectural
mismatch (Garlan et al., 1995), i.e., the inability to
compose seemingly compatible components due to
wrong assumptions these make about their interac-
tion. If the interaction protocols can be injected in-
side components, components may not then be easily
re-used in different contexts - they become protocol
dependent. This will also hinder the understandability
of the system computations independently from the
system interactions. The analysis of system compo-
nents in isolation will be hindered too, and one may
not easily understand during the analysis whether a
design error is due to a wrong computation or wrong
interaction protocol.
While complex connectors aid in the modular sep-
aration of interaction protocols from components in
software architectures, the interaction protocol speci-
fications can sometimes be dangerous for practition-
ers. Languages with complex connector support allow
practitioners to specify interaction protocols that can
globally constrain the interacting components (via the
glue element of connectors)
2
. However, such global
constraints cannot be guaranteed for distributed com-
ponents, which are autonomous entities and can only
know their own local state - global state is not visible
to them. Therefore, software architecture specifica-
tions with complex connectors cannot be realised for
distributed systems. To realise the global constraints,
practitioners will need to add a new controller com-
ponent which will make their system centralised how-
ever. In such a case, any analyses (e.g., performance)
that have been made on the unrealisable specification
will all be invalid as the analysed software architec-
ture specification can no longer be used as it is for the
implementation.
2
Note that a few languages (e.g., Rapide (Luckham,
1996), Koala (van Ommering et al., 2000), and SOFA
(Plasil and Visnovsky, 2002)) allow the specification of
global constraints in different ways (using different nota-
tions).
Architecture Descriptions of Software Systems: Complex Connectors vs Realisability
389

None of the analysed languages addresses the
unrealisability of the connector-centric architectural
languages - except the XCD language (Ozkaya and
Kloukinas, 2014) that has been introduced very re-
cently. In XCD, while connectors are used for spec-
ifying interaction protocols, all protocol constraints
are locally imposed on the components - global con-
straints are not possible. An XCD connector con-
sists structurally of roles, where each role describe
the local interaction protocol for a participating com-
ponent. If a global constraint is required, this can
only be specified via a controller component that sits
among other components and coordinates their inter-
action according to a global constraint.
ACKNOWLEDGEMENTS
This work has been supported by the project of the
Scientific and Technological Research Council of
Turkey (TUBITAK), Grant No: 215E159.
REFERENCES
Allen, R. and Garlan, D. (1997). A formal basis for architec-
tural connection. ACM Trans. Softw. Eng. Methodol.,
6(3):213–249.
Alur, R., Etessami, K., and Yannakakis, M. (2003). Infer-
ence of message sequence charts. IEEE Trans. Soft-
ware Eng., 29(7):623–633.
Binns, P., Englehart, M., Jackson, M., and Vestal, S.
(1996). Domain-specific software architectures for
guidance, navigation and control. International Jour-
nal of Software Engineering and Knowledge Engi-
neering, 6(2):201–227.
Bures, T. (2005). Automated synthesis of connectors for
heterogeneous deployment. Tech. report no. 2005/4,
Dep. of SW Engineering, Charles University, Prague.
Bures, T., Hnetynka, P., and Plasil, F. (2006). Sofa 2.0: Bal-
ancing advanced features in a hierarchical component
model. In SERA, pages 40–48. IEEE Computer Soci-
ety.
Bures, T. and Plasil, F. (2004). Communication style
driven connector configurations. In Ramamoorthy, C.,
Lee, R., and Lee, K., editors, Software Engineering
Research and Applications, volume 3026 of Lecture
Notes in Computer Science, pages 102–116. Springer
Berlin Heidelberg.
Canal, C., Pimentel, E., and Troya, J. M. (1999). Specifica-
tion and refinement of dynamic software architectures.
In Donohoe, P., editor, WICSA, volume 140 of IFIP
Conference Proceedings, pages 107–126. Kluwer.
Clements, P. C., Garlan, D., Little, R., Nord, R. L., and
Stafford, J. A. (2003). Documenting software archi-
tectures: Views and beyond. In Clarke, L. A., Dillon,
L., and Tichy, W. F., editors, ICSE, pages 740–741.
IEEE Computer Society.
Dashofy, E. M., van der Hoek, A., and Taylor, R. N. (2002).
An infrastructure for the rapid development of xml-
based architecture description languages. In Tracz,
W., Young, M., and Magee, J., editors, ICSE, pages
266–276. ACM.
Feiler, P. H., Gluch, D. P., and Hudak, J. J. (2006). The Ar-
chitecture Analysis & Design Language (AADL): An
Introduction. Technical report, Software Engineering
Institute.
Galik, O. and Bures, T. (2005). Generating connectors for
heterogeneous deployment. In Nitto, E. D. and Mur-
phy, A. L., editors, SEM, pages 54–61. ACM.
Garlan, D., Allen, R., and Ockerbloom, J. (1995). Architec-
tural mismatch or why it’s hard to build systems out
of existing parts. In ICSE, pages 179–185.
Garlan, D. and Shaw, M. (1994). An introduction to soft-
ware architecture. Technical report, Pittsburgh, PA,
USA.
Holzmann, G. J. (2004). The SPIN Model Checker - primer
and reference manual. Addison-Wesley.
Issarny, V., Bennaceur, A., and Bromberg, Y.-D. (2011).
Middleware-layer connector synthesis: Beyond state
of the art in middleware interoperability. In Bernardo,
M. and Issarny, V., editors, SFM, volume 6659 of
Lecture Notes in Computer Science, pages 217–255.
Springer.
Kiczales, G. and Hilsdale, E. (2001). Aspect-oriented pro-
gramming. SIGSOFT Softw. Eng. Notes, 26(5):313–.
Kloukinas, C. and Ozkaya, M. (2012). Xcd - modular, re-
alizable software architectures. In Pasareanu, C. S.
and Salaün, G., editors, Formal Aspects of Component
Software, 9th International Symposium, FACS 2012,
Mountain View, CA, USA, September 12-14, 2012. Re-
vised Selected Papers, volume 7684 of Lecture Notes
in Computer Science, pages 152–169. Springer.
Lago, P., Malavolta, I., Muccini, H., Pelliccione, P., and
Tang, A. (2015). The road ahead for architectural lan-
guages. IEEE Software, 32(1):98–105.
Luckham, D. C. (1996). Rapide: A language and toolset
for simulation of distributed systems by partial order-
ings of events. Technical report, Stanford University,
Stanford, CA, USA.
Magee, J. and Kramer, J. (1996). Dynamic structure in soft-
ware architectures. In SIGSOFT FSE, pages 3–14.
Magee, J., Kramer, J., and Giannakopoulou, D. (1997).
Analysing the behaviour of distributed software archi-
tectures: a case study. In FTDCS, pages 240–247.
IEEE Computer Society.
Malavolta, I., Lago, P., Muccini, H., Pelliccione, P., and
Tang, A. (2012). What industry needs from architec-
tural languages: A survey. IEEE Transactions on Soft-
ware Engineering, 99.
Medvidovic, N., Oreizy, P., Robbins, J. E., and Taylor, R. N.
(1996). Using object-oriented typing to support archi-
tectural design in the c2 style. In SIGSOFT FSE, pages
24–32.
Medvidovic, N. and Taylor, R. N. (2000). A classification
and comparison framework for software architecture
MODELSWARD 2017 - 5th International Conference on Model-Driven Engineering and Software Development
390

description languages. IEEE Trans. Software Eng.,
26(1):70–93.
Oussalah, M., Smeda, A., and Khammaci, T. (2004). An
explicit definition of connectors for component-based
software architecture. In ECBS, pages 44–51. IEEE
Computer Society.
Ozkaya, M. (2016a). Analysis of architectural languages.
https://sites.google.com/site/ozkayamert1/als. Online;
accessed: 2016-12-17.
Ozkaya, M. (2016b). What is software architecture to prac-
titioners: A survey. In Hammoudi, S., Pires, L. F.,
Selic, B., and Desfray, P., editors, MODELSWARD
2016 - Proceedings of the 4rd International Confer-
ence on Model-Driven Engineering and Software De-
velopment, Rome, Italy, 19-21 February, 2016., pages
677–686. SciTePress.
Ozkaya, M. and Kloukinas, C. (2014). Design-by-
contract for reusable components and realizable ar-
chitectures. In Seinturier, L., de Almeida, E. S.,
and Carlson, J., editors, CBSE’14, Proceedings of
the 17th International ACM SIGSOFT Symposium
on Component-Based Software Engineering (part of
CompArch 2014), Marcq-en-Baroeul, Lille, France,
June 30 - July 4, 2014, pages 129–138. ACM.
Perry, D. E. and Wolf, A. L. (1992). Foundations for the
study of software architecture. SIGSOFT Softw. Eng.
Notes, 17(4):40–52.
Plasil, F. and Visnovsky, S. (2002). Behavior protocols
for software components. IEEE Trans. Software Eng.,
28(11):1056–1076.
Reussner, R., Poernomo, I., and Schmidt, H. (2003). Rea-
soning about Software Architectures with Contrac-
tually Specified Components. In Cechich, A., Piat-
tini, M., and Vallecillo, A., editors, Component-Based
Software Quality, volume 2693 of Lecture Notes in
Computer Science, page 287–325. Springer Berlin
Heidelberg.
Rumbaugh, J. E., Jacobson, I., and Booch, G. (2005). The
unified modeling language reference manuel - covers
UML 2.0, Second Edition. Addison Wesley object
technology series. Addison-Wesley.
Shaw, M., DeLine, R., Klein, D. V., Ross, T. L., Young,
D. M., and Zelesnik, G. (1995). Abstractions for soft-
ware architecture and tools to support them. IEEE
Trans. Software Eng., 21(4):314–335.
Taylor, R. N., Medvidovic, N., Anderson, K. M., Jr., E.
J. W., Robbins, J. E., Nies, K. A., Oreizy, P., and
Dubrow, D. L. (1996). A component- and message-
based architectural style for gui software. IEEE Trans.
Software Eng., 22(6):390–406.
Ubayashi, N., Nomura, J., and Tamai, T. (2010). Archface:
A contract place where architectural design and code
meet together. In Kramer, J., Bishop, J., Devanbu,
P. T., and Uchitel, S., editors, ICSE, pages 75–84.
ACM.
van Ommering, R. C., van der Linden, F., Kramer, J.,
and Magee, J. (2000). The koala component model
for consumer electronics software. IEEE Computer,
33(3):78–85.
Architecture Descriptions of Software Systems: Complex Connectors vs Realisability
391
