
Quantitative Robustness – A Generalised Approach to Compare the
Impact of Disturbances in Self-organising Systems
Jan Kantert
1
, Sven Tomforde
2
, Christian Müller-Schloer
1
, Sarah Edenhofer
3
and Bernhard Sick
2
1
Institute of Systems Engineering, Leibniz University Hanover, Appelstr. 4, 30167 Hanover, Germany
2
Intelligent Embedded Systems Group, University of Kassel, Wilhelmshöher Allee 73, 34121 Kassel, Germany
3
Organic Computing Group, University of Augsburg, Eichleitnerstr. 30, 86159 Augsburg, Germany
Keywords:
Robustness, Organic Computing, Multi-agent-systems, Self-organisation.
Abstract:
Organic Computing (OC) and Autonomic Computing (AC) systems are distinct from conventional systems
through their ability to self-adapt and to self-organise. However, these properties are just means and not the
end. What really makes OC and AC systems useful is their ability to survive in a real world, i.e. to recover
from disturbances and attacks from the outside world. This property is called robustness. In this paper, we
propose a metric to gauge robustness in order to be able to quantitatively compare the effectiveness of different
self-organising and self-adaptive system designs with each other. In the following, we apply this metric to three
experimental application scenarios and discuss their usefulness.
1 INTRODUCTION AND
MOTIVATION
Organic Computing (Tomforde et al., 2011) (OC)
(and Autonomic Computing (IBM, 2005) (AC)) sys-
tems are inspired by nature. They mimic architec-
tural and behavioural characteristics, such as self-
organisation, self-adaptation or decentralised control,
in order to avoid a single point of failure and to
achieve desirable properties like e.g. self-healing,
self-protection, and self-optimisation. Moreover, OC
and AC systems organise themselves bottom-up; this
can eventually lead to the formation of macroscopic
patterns from microscopic behaviours. Such „emer-
gent“ effects (Mnif and Müller-Schloer, 2006) can be
beneficial or detrimental and have to be understood
and controlled.
It is a misconception, however, that the goal of
building OC systems is primarily the construction
of self-adaptive, emergent or self-organising systems.
Self-organisation and self-adaptation are just means
to make technical systems resistant against external
or internal disturbances. It is also a misconception
to assume that OC systems (or self-adaptive and self-
organising systems in general) generally achieve a
higher performance (e.g. higher speed) than conven-
tional systems. OC systems are not per se faster than
conventional systems but they return faster to a certain
corridor of an acceptable performance in the presence
of disturbances. The ultimate goal of OC systems
is to become more resilient against disturbances and
attacks from outside. We call this property ”robust-
ness”.
In a variety of experiments in different applica-
tion fields, such as wireless sensor networks (Kan-
tert et al., 2016b), open distributed grid-computing
systems (Choi et al., 2008), and urban traffic con-
trol (Prothmann et al., 2011; Tomforde et al., 2010),
we have observed a characteristic behaviour of OC
systems under attack1: They show a fast drop in util-
ity after a disturbance (or an intentional attack), fol-
lowed by a somewhat slower recovery to the origi-
nal performance provided that there are suitable OC
mechanisms (such as a learning observer/controller
architecture Tomforde et al. (2011)) in place. The
exact characteristic of this utility drop and recov-
ery curve is an important indicator for the effective-
ness of the observer/controller mechanism. If we can
quantify robustness, we can compare different ob-
server/controller designs in terms of their ability to
provide resilience to external disturbances.
The general idea for measuring robustness is to
1An attack is a certain instance of the broader class of
disturbances. In the remainder of this paper, we will use the
term "attack" but the discussion is valid in general for all
kinds of disturbances.
Kantert J., Tomforde S., MÃijller-Schloer C., Edenhofer S. and Sick B.
Quantitative Robustness â
˘
A ¸S A Generalised Approach to Compare the Impact of Disturbances in Self-organising Systems.
DOI: 10.5220/0006137300390050
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 39-50
ISBN: 978-989-758-219-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
39

use the area of the characteristic utility degradation
over time because this area captures the depth of the
utility drop as well as the duration of the recovery. A
degradation of zero corresponds to an ideally robust
system. In a more detailed view, it is interesting to
analyse the gradient of the drop phase and the bot-
tom level of the degraded utility. These figures allow
the characterisation of the so-called passive robust-
ness. As soon as the recovery mechanisms are acti-
vated (usually this happens as fast as possible after
the disturbance), the upward gradient of the utility is
an indicator of the effectiveness of the system’s active
robustness. „Utility“ is an application-specific metric.
It is used as a generalised term for the targeted effect
of the system as defined by the user. It can be a speed
(in case of robots or autonomous cars), a performance
or throughput (in case of computing systems), or a
transfer rate (in case of communication systems).
We have outlined a first draft of this robustness
metric in (Kantert et al., 2016a) in a preliminary form.
In this paper, we will review and refine this met-
ric (Section II). In the following, we will apply it
to a wireless sensor network (III), a desktop grid-
computing system (IV), and an urban traffic manage-
ment system (V). Then, we will discuss its usefulness
(VI) and conclude with a discussion of future work.
2 APPROACH – MEASURING
ROBUSTNESS
In this approch, we extend our previous work (Kan-
tert et al., 2016a) by classifying and quantifying the
robustness.
2.1 Passive and Active Robustness
We assume a system S in an undisturbed state to show
a certain target performance. More generally, we rate
a system by a utility measure U, which can take the
form of a performance or a throughput (in case of a
computing system), a speed (in case of car), or any
other application-specific metric. Typically, a sys-
tem reacts to a disturbance by deviating from its tar-
get utility U
target
by ∆U. Passively robust systems,
such as flexible posts or towers under wind pressure,
react to the disturbance by a deflection ∆U = D
x
.
This deflection remains constant as long as the distur-
bance remains. Active robustness mechanisms (such
as self-organisation effected by a control mechanism
like an observer/controller) counteract the deviation
and guide the system back to the undisturbed state
with ∆U = 0 or U
target
. If we want to quantify robust-
ness (for comparison between different systems), we
have to take into account the following observables:
1. The strength of the disturbance, z
2. The drop of the system utility from the acceptable
utility U
acc
, ∆U, and
3. The duration of the deviation (the recovery time
t
rec
− t
z
).
We will introduce the developed method that takes all
three aspects into consideration in the following part
of this paper.
2.2 Measuring Robustness
We assume that it is generally feasible to measure the
utility over time (at least from the point of view of
an external observer). However, it is often hard to
quantify the strength of a disturbance z. Therefore,
depending on the application, an estimation of z is re-
quired for our model. Furthermore, the system has to
know a target utility value U
target
(maybe the highest
possible utility) and an acceptable utility value U
acc
(a minimal value where the system is still useful to
the user). The goal of the model is to measure the re-
sponse of a system to a certain disturbance in terms
of its utility and compare it to other disturbances or
systems.
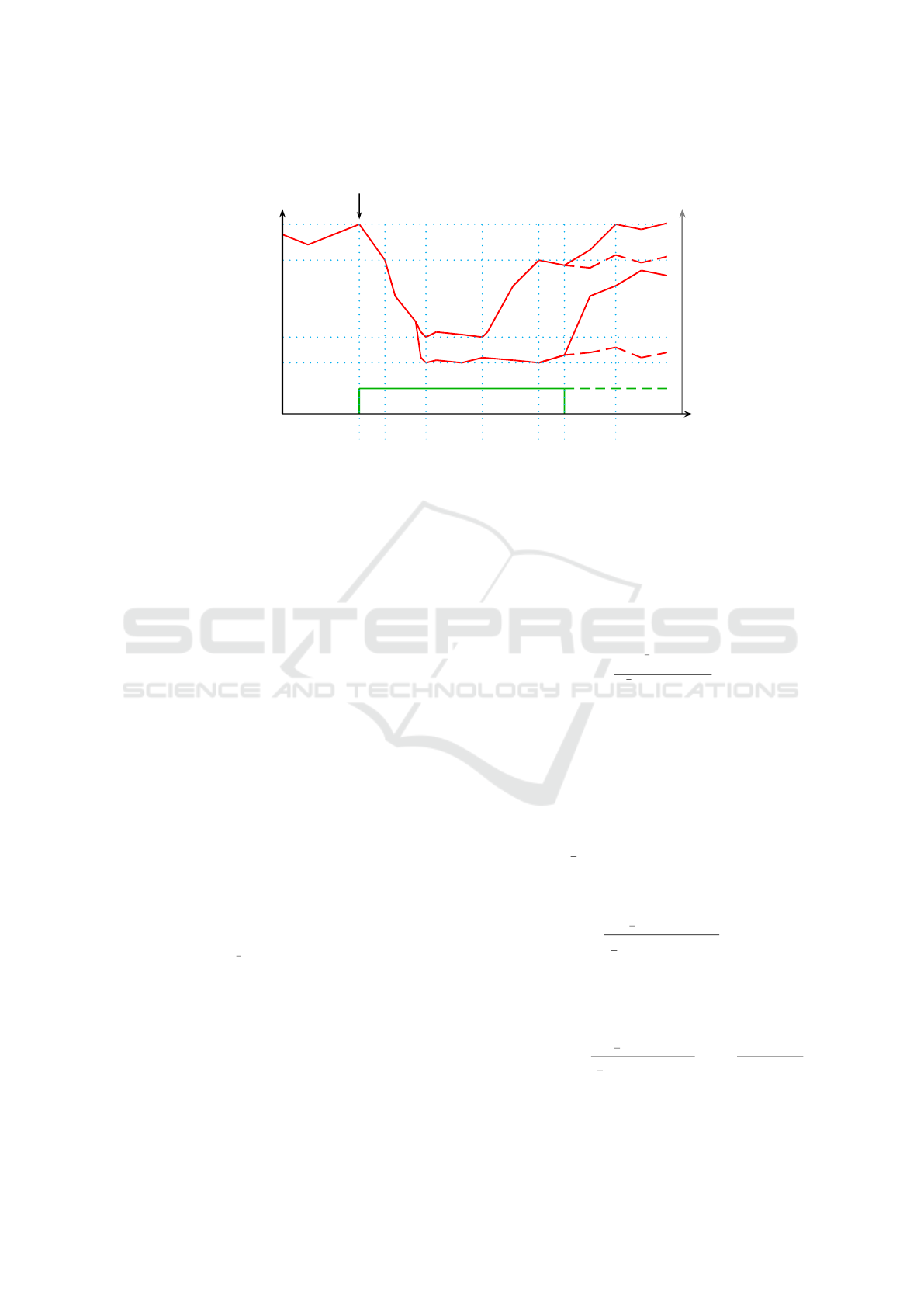
In Figure 1, we show an exemplary typical util-
ity function U (t). In the beginning, U is at the target
value U
target
. At time t
z
, a disturbance of strength z
happens (displayed in green) and the utility (red) de-
creases. Once it drops below the acceptance threshold
U
acc
at t
cm
, a control mechanism (CM) starts to inter-
vene. At t
low
, U reaches U
low,perm
without an effective
recovery mechanism and U
low,cm
if a control mecha-
nism is acting against the impact of the disturbance.
With a CM, U starts to recover at t
rec
and passes U
acc
at t
acc
. However, without a CM, U does not recover.
We can differentiate between two classes of be-
haviour during an attack:
1) An effective CM is started and the system recov-
ers to at least U
acc
.
2) The system does not recover during attack (or dur-
ing a disturbance).
Furthermore, we see two different types of be-
haviour when the attack ends at t
z
. Either (a) the util-
ity reaches the same value as before the attack (here
U
target
at t
target
; solid red line in Figure 1), or (b) it
stays at the same level as during the attack (dashed
line). In total, this results in four different stereotypes
of behaviour:
1a) The system S recovers during the attack to U ≥
U
acc
and returns to U ≥ U
target
when the attack
ends. This is a strongly robust system.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
40
U
low,perm
U
low,cm
U
target
U
acc
t
z
t
cm
t
low
t
rec
t
acc
t
¯z
t
target
U
z
t
z
1a
1b
2a
2b
Figure 1: Utility degradation over time. At t
z
a disturbance with strength z occurs. The utility U drops. When it reaches U
acc
(i.e. a utility value that is mapped on the acceptance space of the considered system, see Schmeck et al. (2010)), a control
mechanism (CM) is activated for (1) which only decreases to U
low,cm
(i.e. the lowest utility value under presence of the control
mechanism CM). At t
rec
, recovery starts and (1) passes U
acc
at t
acc
. For (2) no CM is activated and utility drops to U
low,perm
(with perm referring to a system-inherent permanent robustness level) and no recovery occurs. When the attack ends (a), the
utility recovers U
target
eventually (i.e. it reaches the target space again, see Schmeck et al. (2010)). If the attack prevails or did
permanent damage to the system (b), utility may stay at a lower value.
1b) S recovers during the attack to U ≥ U
acc
and stays
there when the attack ends. This is a weakly robust
system.
2a) S does not recover during the attack but returns to
the previous value after the attack ends. Such a
system shows just a certain "elasticity", we call it
partially robust.
2b) S does not recover during the attack, it stays at the
low utility level U
low,perm
. Such a system is not
robust at all.
While important, this only serves as a classifica-
tion of different typical behaviours. However, to com-
pare the effect of different disturbances z or different
CMs, we have to quantify the utility degradation. We
define the utility degradation D
U
as the area between
a baseline utility (U
baseline
) and U (t) for the time when
U ≤ Uacc (see Equation 1):
D
U
B
Z
t
z
t
z
(
U
baseline
(t) −U (t)
)
dt (1)
First, we need to define a baseline U
baseline
for the
measurement. This can be either hypothetical by us-
ing U
target
or U
acc
(in Figure 1) or we can run a refer-
ence experiment (as we will show later in Scenario 2,
see Section 4). In order to maximise the system ro-
bustness, we have to minimise D
U
. A system, which
never drops below U
baseline
apparently has maximal
robustness. We define the robustness during attack R
a
as:
R
a
B
R
t
z
t
z
U (t) dt
R
t
z
t
z
U
baseline
(t) dt
For each CM to be compared, we measure a util-
ity degradation D
U
. This allows comparing the be-
haviour of two CMs during an attack (such as cases
(1) and (2) from above) or the effectiveness of one
CM for different attacks.
Furthermore, when the attack ended, we can mea-
sure the long-term utility degradation D
U,long_term
which is the area between U
baseline
and the actual U for
the time after t
z
. This allows us to compare the cases
(1a/2a) and (1b/2b) from above. Hence, the long-term
robustness R
l
is defined as:
R
l
B
R
t
target
z
U (t) dt
R
t
target
z
U
baseline
(t) dt
In cases where U (t) never reaches U
target
again, t
target
is ∞ (also U
D
is ∞) but we can calculate the open in-
tegral:
t
target
= ∞ → R
l
B
R
t
target
z
U (t) dt
R
t
target
z
U
baseline
(t) dt
= lim
t→∞
U (∞)
U
baseline
(∞)
In all normal cases, R is assumed to be in the in-
terval [0, 1]. It can never be negative and will only
Quantitative Robustness â
˘
A¸S A Generalised Approach to Compare the Impact of Disturbances in Self-organising Systems
41

be larger than 1 if U (t) improves through the distur-
bance which happens only under very specific condi-
tions (i.e. the system settled in a local optimum before
the disturbance occurs, and is able to leave this local
optimum as a result of the CM’s intervention). Even
if the utility U (t) never recovers, we get an asymp-
totic robustness value. However, values of R
l
with
t
target
= ∞ are not comparable to values for R
l
with
t
target
, ∞ because the open integral would be always
1 in this case.
2.3 Related Work
The term “robustness” is widely used with differ-
ent meanings in literature, mostly depending on the
particular context or underlying research initiative.
Typical definitions include the ability of a system
to maintain its functionality even in the presence of
changes in their internal structure or external envi-
ronment (sometimes also called resilient or depend-
able systems) Callaway et al. (2000), or the degree to
which a system is insensitive to effects that have not
been explicitly considered in the design Slotine et al.
(1991).
When especially considering engineering of in-
formation and communication technology-driven so-
lutions, the term “robust” typically refers to a ba-
sic design concept that allows the system to func-
tion correctly (or, at the very minimum, not failing
completely) under a large range of conditions or dis-
turbances. This also includes dealing with manufac-
turing tolerances. Due to this wide scope of related
work, the corresponding literature is immense, which
is e.g. expressed by detailed reports that range back
to the 90ies Taguchi (1993). For instance, in the con-
text of scheduling systems, robustness of a schedule
refers to its capability to be executable – and leading
to satisfying results despite changes in the environ-
ment conditions Scholl et al. (2000). In contrast, the
systems we are interested in (i.e. self-adaptive and
self-organising OC systems) typically define robust-
ness in terms of fault tolerance (e.g. Jalote (1994)).
In computer networks, robustness is often used as
a concept to describe how well a set of service level
agreements are satisfied. For instance, Menasce et al.
explicitly investigate the robustness of a web server
controller in terms of workloads that exhibit some
sort of high variability in their intensity and/or ser-
vice demands at the different resources Menascé et al.
(2005).
More specifically and beyond these general defini-
tions of the notion of robustness, we shift the focus to-
wards quantification attempts. Only a few approaches
known in literature aim at a generalised method to
quantify robustness; in a majority of cases, self-
organised systems are either shown to perform better
(i.e. achieve a better system-inherent utility function)
or react better in specific cases (or in the presence
of certain disturbances), see e.g. ICAC (2015) and
SASO (2015). . In the following, we discuss the most
important approaches to robustness quantification.
In the context of OC, a first concept for a classifi-
cation method has been presented in Schmeck et al.
(2010). Here, the idea is (as in our approach) to
take the system utility into account. Based on a pre-
defined separation of different classes of goal achieve-
ment (i.e. distinguishing between target, acceptance,
survival, and dead spaces in a state space model of
the system S), the corresponding states are assigned to
different degrees of robustness. Consequently, differ-
ent systems are either strongly robust (i.e. not leaving
the target space), robust (i.e. not leaving the accep-
tance space), or weakly robust (i.e. returning from
the survival space in a defined interval). In contrast
to our method, a quantitative comparison is not pos-
sible. In particular, this robustness classification does
not take the recovery time into account.
Closely related is the approach by Nafz et al. pre-
sented in Nafz et al. (2011), where the internal self-
adaptation mechanism of each element in a superior
self-organising system has the goal to keep the ele-
ment’s behaviour within a pre-defined corridor of ac-
ceptable states. Using this formal idea, robustness can
be estimated by the resulting goal violations at run-
time. Given that system elements have to obey the
same corridors, this would also result in a compara-
ble metric. Recently, the underlying concept has been
taken up again to develop a generalised approach for
testing self-organised systems, where the behaviour
of the system under test has to be expressable quanti-
tatively Eberhardinger et al. (2015). However, this de-
pends on the underlying state variables and invariants
that are considered – which might be more difficult to
assess at application level (compared to considering
the utility function in our approach).
In contrast, Holzer et al. nodes are considered
as stochastic automaton in a network and model the
nodes’ configuration as a random variable Holzer and
de Meer (2011). Based on this approach, they com-
pute the level of resilience (the term is used there sim-
ilarly to robustness in this paper) depending on the
network’s correct functioning in the presence of mal-
functioning nodes that are again modelled as stochas-
tic automatons Holzer and de Meer (2009). In con-
trast to our approach, this does not result in a compa-
rable metric and limits the scope of applicability due
to the underlying modelling technique.
From a multi-agent perspective, Di Marzo Seru-
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
42

gendo approached a quantification of robustness us-
ing the accessible system properties Di Marzo Seru-
gendo (2009). In general, properties are assumed to
consists of invariants, robustness attributes, and de-
pendability attributes. By counting or estimating the
configuration variability of the robustness attributes,
systems can be compared with respect to robustness.
Albeit the authors discuss an interesting general idea,
a detailed metric is still open.
Also in the context of multi-agent systems, Nimis
and Lockemann presented an approach based on
transactions Nimis and Lockemann (2004). They
model a multi-agent system as a layered architecture
(i.e. seven layers from communication at the bot-
tom to the user at the top layer). Of particular in-
terest is the third layer, i.e. the conversation layer.
The key idea of their approach is to treat agent con-
versations as distributed transactions. The system is
then assumed to be robust, if guarantees regarding
these transactions can be formulated. This requires
technical prerequisites, i.e. the states of the partici-
pating agents and the environment must be stored in
a database – this serves as basis for formulating the
guarantees. Obviously, such a concept assumes hard
requirements that are seldom available, especially not
in open, distributed systems where system elements
are not under control of a centralised element and
might behave unpredictably.
To conclude this discussion, we can observe that a
generalised approach to quantify robustness is needed
that: (a) works on externally measurable values, (b)
does not need additional information sources (e.g.
transactional data-bases), (c) distinguishes between
system-inherent (or passive) and system-added (or ac-
tive) robustness (to allow for an estimation of the
effectiveness of the particular mechanism) and (d)
comes up with a measure that allows for a comparison
of different systems for the same problem instance.
We claim that our approach as outlined before fulfils
all of these aspects. In order to demonstrate the effec-
tiveness, we apply it to three different use cases in the
following part of this paper.
3 APPLICATION SCENARIO 1:
WIRELESS SENSOR
NETWORKS
Wireless Sensor Networks (WSNs) consist of spa-
tially distributed nodes which communicate over a ra-
dio interface. Nodes sense locally and send the result
to the root node in the network. Since most nodes
cannot reach root directly, other nodes have to relay
packets. To find a path to root, the Routing Proto-
col for Lossy and Low Power Networks (RPL) (Win-
ter et al., 2012) is used. The primary objective (O1)
in such networks is to reach a high Packet Delivery
Rate (PDR; ranges from 0 to 1). Since nodes are
battery-powered, the secondary objective (O2) is to
minimise the number of Transmitted Packets (#TX)
because sending data over the air causes most power
consumption in WSNs. These two objectives translate
into two utility functions, which we have to investi-
gate with respect to their robustness. Utility function
1 is PDR(t), utility function 2 is #TX(t).
In open distributed sensor networks, attacks by
malicious or broken nodes can occur, which lead to
poor PDR. To counter such threats, we introduced
end-to-end trust in RPL in previous work (Kantert
et al., 2016b). In this trust-enhanced approach, the
nodes assess the trustworthiness of their parents and
isolate bad-behaving nodes. This constitutes a spe-
cific self-organised control mechanism CM. We are
interested in a comparison of different variants of
CMs:
CM0 OF0. This is the default routing mechanism
in RPL as described in (Winter et al., 2012).
It selects parents by the smallest rank.
CM1 Trust + ETX. Nodes use a trust metric
to rate and isolate bad-performing parents.
See (Kantert et al., 2016b) for more details.
The particular method is not of interest in
the context of this paper, it serves as a repre-
sentative for a more powerful, self-organised
control mechanism.
CM2 Trust + ETX + Second Chance. This ap-
proach is similar to the previous one but
also incorporates a mechanism to retry pre-
viously isolated parents occasionally (i.e. af-
ter re-stabilising the system, see again (Kan-
tert et al., 2016b) for details). This approach
serves as a representative with even more de-
cision freedom of the CM.
In an undisturbed RPL network, our trust-
enhanced system implemented as CM1 behaves very
similar to standard RPL (CM0). However, when an
attack occurs, standard RPL looses numerous pack-
ets and PDR drops because it cannot handle (inten-
tional or unintentional) malicious behaviour. When
enabling our approach, nodes start to identify and iso-
late bad-behaving parents. Hence, the PDR recovers
to nearly 100% (i.e. U
target
) while the attack happens.
Standard RPL only recovers after the attack ends (see
Figure 2).
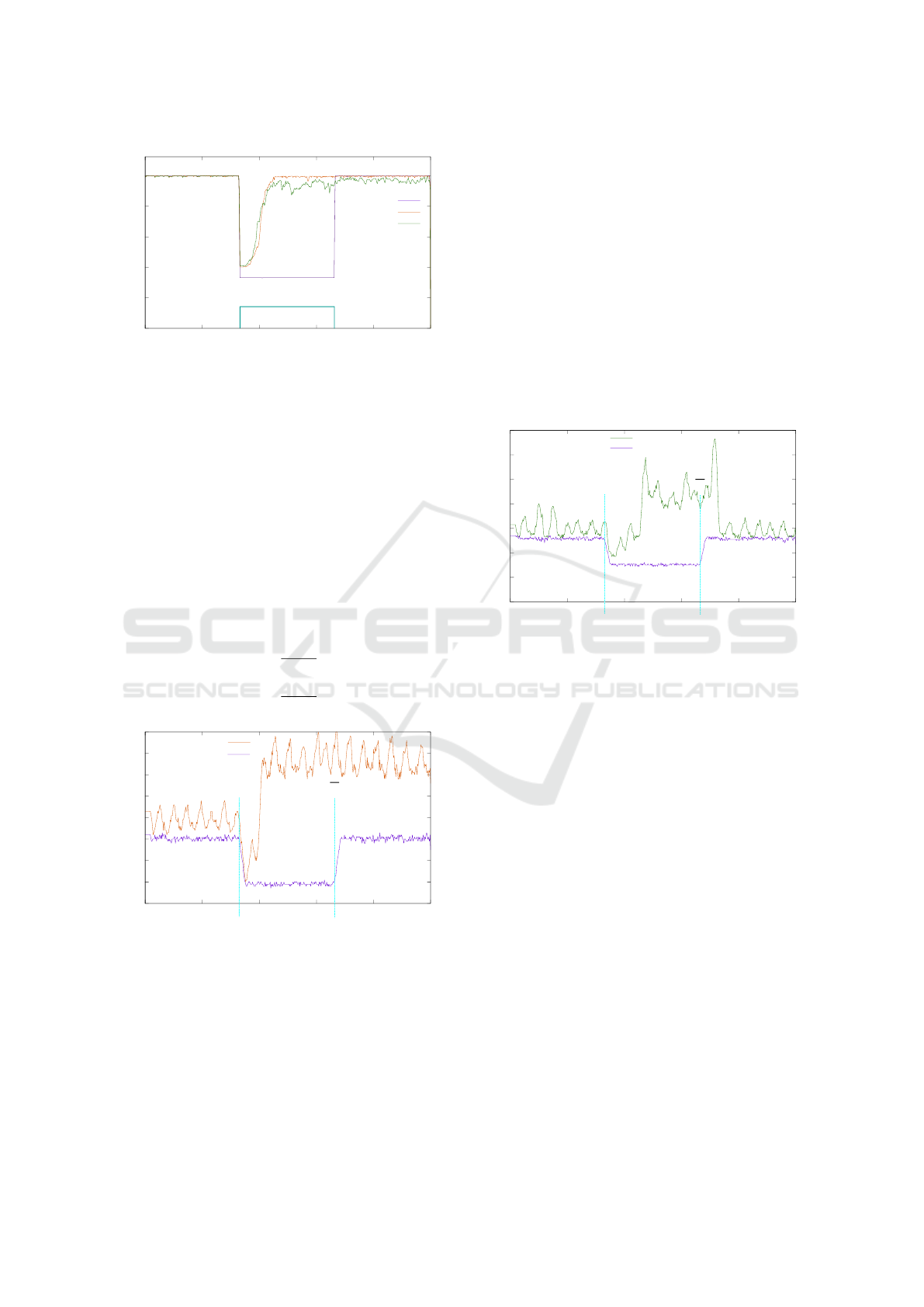
For O1 (PDR(t)), D
U
is 112 for CM0, 13.7 for
CM1 and 17.9 for CM2. Quantitatively, D
U
of CM1
Quantitative Robustness â
˘
A¸S A Generalised Approach to Compare the Impact of Disturbances in Self-organising Systems
43
0
0.2
0.4
0.6
0.8
1
0 100 200 300 400 500
z
TRUST + ETX
OF0
TRUST + ETX + SC
Figure 2: Objective 1, Utility function 1: Packet Delivery
Rate (PDR) over sequences (time). At time step 160, an at-
tack starts and ends at time step 340. PDR drops to about
30% for OF0 during the attack and recovers afterwards.
TRUST + ETX and TRUST + ETX + Second-Chance re-
cover during the attack and stay near 100% PDR until the
end of the experiment.
is 87.7% better than CM0 and CM2 is 84% better than
CM0. Also, CM1 has 23.5% smaller D
U
than CM2.
The baseline is 1 (see Equation 2). R
a
for CM0 has
a value of 70% (3), CM1 has a value of 91% (4) and
CM2 has a value of 89%(5).
U
baseline
(t) B 1 (2)
R
a,CM0
≈ 70% (3)
R
a,CM1
B
146.3
160
≈ 91% (4)
R
a,CM2
B
142.1
160
≈ 89% (5)
40
50
60
70
80
90
100
110
120
0 100 200 300 400 500
z
z
TRUST + ETX
OF0
Figure 3: Objective 2, Utility function 2: Transmitted Pack-
ets (#TX) over time. At time step 160, an attack starts, and
ends it at time step 340. During the attack #TX increases
for the TRUST + ETX control mechanism (CM1) and stays
at that level after the attack. For OF0 (CM0), #TX drops
during the attack and recovers to the undisturbed level af-
terwards.
For objective O1 (i.e. PDR(t)) CM1 recovers per-
fectly during the attack and returns to the same value
as before the attack. Therefore, in this scenario, RPL
with Trust + ETX is rated as strongly robust. How-
ever, this changes when we look at the second ob-
jective O2 represented by utility function 2: metric
#TX(t) (the number of transmitted packets, see Fig-
ure 3). When the attack starts, #TX drops for all CMs
(which would be perfect if PDR stayed at a constant
level). For Trust + ETX it increases to a higher level
because the new routes are longer and require more
transmissions. This is expected since some parents
failed. However, after the attack ends, only standard
RPL returns to its previous #TX. Trust + ETX stays
at a high level. This is acceptable when dealing with
intentional malicious attackers but this is bad when
disturbances are only temporary. Therefore, Trust +
ETX is not robust regarding the second utility func-
tion.
20
40
60
80
100
120
140
160
0 100 200 300 400 500
z
z
TRUST + ETX + SC
OF0
Figure 4: Objective 2, Utility function 2: Transmitted Pack-
ets (#TX) over time. At time step 160, an attack starts, and
ends at time step 340. During the attack #TX(t) increases
for the TRUST + ETX + Second-Chance (CM2). For OF0
(CM0), #TX(t) drops during the attack and recovers to the
same level as before afterwards. Unlike in Figure 3, TRUST
+ ETX + Second-Chance (CM2) recovers to a similar level
as before the attack.
Most energy in wireless sensor nodes is used when
sending packets. Thus, to recover the energy con-
sumption and #TX after an attack, we introduced
TRUST + ETX + Second-Chance as a third control
mechanism CM2 which retries parents when the sys-
tem has stabilised (from a node’s local perspective).
This leads to a slight decrease of the PDR during the
attack because nodes loose packets when retrying dur-
ing an attack. However, after the attack the PDR is
very similar and #TX recovers to its level from before
the attack (see Figures 2 and 4).
For O2, we measure D
U
only after the attack.
Quantitatively, D
U
for CM1 is ∞ because it does not
return to the previous values. For CM0 D
U
is about
0. CM2 needs some time to recover and has a D
U
of 1998.6. Thus, CM0 is the best metric when only
considering O2 (since it is very bad for O1). In our
robustness metric, we have to assume that a higher
utility is better. In this case, the best utility for O2
would be a value of 0 (which is unrealistic). There-
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
44

fore, we invert U (t) to get a utility function for the
calculation of R
l
(see Equation 6). This results in a
baseline U
baseline
of 43 (saved packets per second; see
Equation 7). For CM1 this results in an asymptotic
long-term robustness R
l
of 35% (8). CM2 recovers
and has a robustness value R
l
of 47% (not compara-
ble to CM1; Equation 9).
U
normalised
(t) B 120 −U (t) (6)
U
baseline
B 120 − 77 = 43
packets
s
(7)
R
l,CM1
≈
120 − 105
43
≈ 35% (8)
R
l,CM2
≈
401.4
860
≈ 47% (9)
CM2 (TRUST + ETX + Second-Chance) is
strongly robust for PDR. Also, it is robust regarding
#TX. It does not recover during the attack (because
better routes do not exist) but it recovers to the previ-
ous state when the attack ends.
4 APPLICATION SCENARIO 2:
OPEN DISTRIBUTED SYSTEMS
Another scenario we measured robustness in is the
simulation of an open, distributed Multi-agent Sys-
tem with applied trust metrics, the Trusted Desktop
Grid (TDG) (Edenhofer et al., 2015). In this grid,
jobs J are created by the agents and split into work
units (WU), which are calculated in a distributed way
by the agents. The success (or utility) is expressed
as the speedup σ(t). σ(t) is defined as the time the
agent would have needed to process all work units on
its own (sel f ) divided by the real time it took to cal-
culate the job in a distributed way in the system (dist),
see Equation 10. A job J is released in time step t
rel
J
and completed in t
compl
J
.
σ =
∑
J
(t
compl
sel f
− t
rel
sel f
)
∑
J
(t
compl
dist
− t
rel
dist
)
(10)
In this scenario, our objective is to maximise
the utility function speedup σ(t) (see Equation 10).
Nodes make decisions based on a local trust met-
ric and isolate bad-behaving agents using this Con-
trol Mechanism (CM1; see (Klejnowski, 2014) for de-
tails). We compare different attacks:
A0 No attack. Used as baseline.
A1 A short attack which ends at t
z
.
Figure 5: Disturbance D1: Robustness in the TDG. Attack
of 100 EGO from tick 80,000 to 120,000 and continuous
from 80,0000 (A2). t
low
marks the point in time, where σ(t)
is at its lowest. The speedup starts to recover (t
rec
) during
the attack until it reaches U
acc
(at t
acc
). After the attack has
stopped, the speedup returns to the level it had before for
A1. However, it stays at about 10 for A2.
A2 Permanent attack which continues until the ex-
periment ends.
Additionally, we consider two different disturbances
by stereo-type attacker behaviour:
D1 Egoistic agents (EGO) are accepting all WU,
but abort 80% of them after some time, which
decreases σ(t) because these WUs have to be
redistributed.
D2 Freeriding agents (FRE) do not accept WU at
all. They reject WUs right away but try to dis-
tribute their WUs at the same time.
For evaluation purposes, we investigated exem-
plary scenarios that incorporate disturbed system
states. More precisely, we simulated 100 well-
behaving adaptive agents (ADA). At time t
z
, 100 bad-
behaving egoistic agents (EGO; D1) join the system,
simulating a colluding attack. To show the effect of
robustness in the system, we calculated the average
speedup of 10 runs with a length of 200,000 ticks
each. We want to compare the system behaviour (i.e.
its robustness) under two different attacks. Attack
A1 starts at tick 80,000 and lasts 40,000 ticks. At-
tack A2 is a continuous attack of 100 EGO starting at
tick 80,000. As baseline, we ran the same experiment
without an attack (A1; see Figure 5).
In both attacks (A1 and A2), the average speedup
of the ADA during the attack of the EGO is decreased,
due to the malevolent behaviour of the EGO. t
low
marks the point in time, where σ of the ADA is at its
lowest. During the attack, once the average speedup
of ADA increases by 5% (t
rec
) over σ(t) at t
low
, the re-
covery phase is said to start; recovery is defined to be
reached, if σ(t) is at least 75% (at t
acc
) of σ(t) before
the attack in t
z
.
In the first attack, after tick 120,000, the ADA
have to redistribute the WUs formerly occupied by
Quantitative Robustness â
˘
A¸S A Generalised Approach to Compare the Impact of Disturbances in Self-organising Systems
45
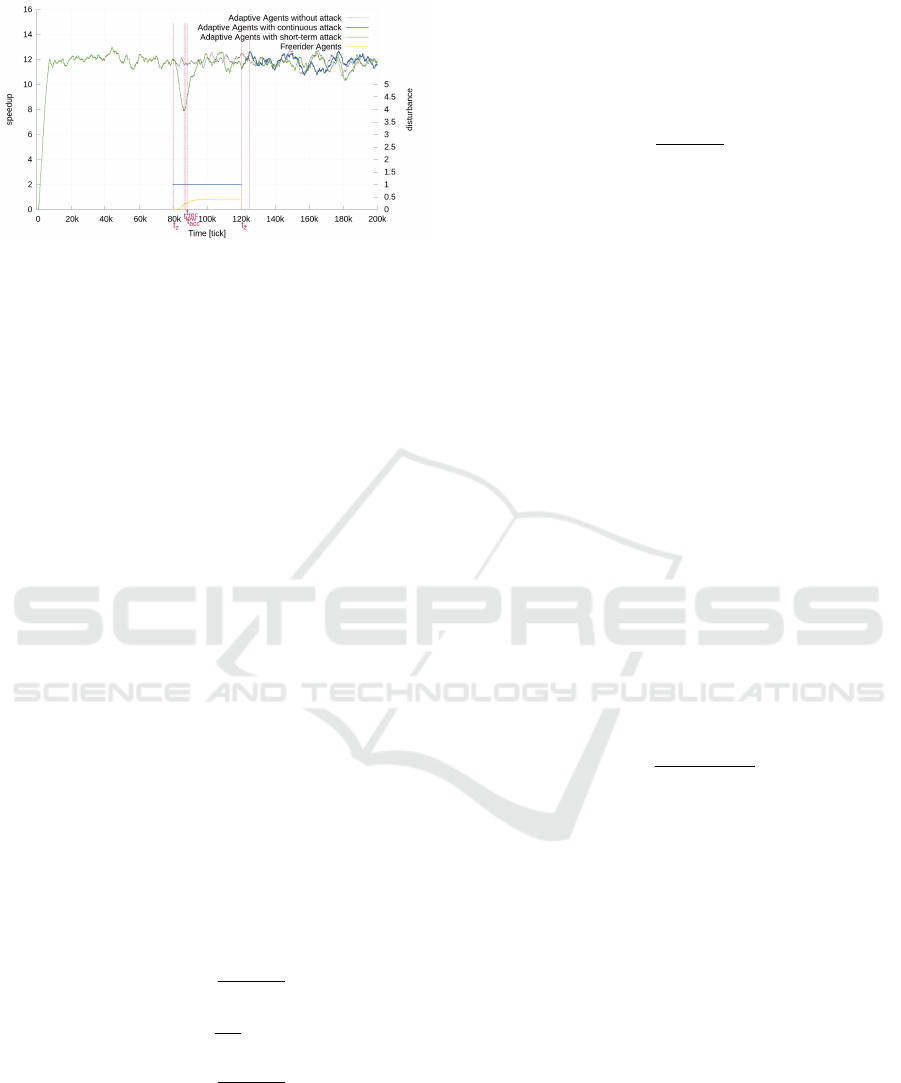
Figure 6: Disturbance D2: Robustness in the TDG. Attack
of 100 FRE from tick 80,000 to 120,000 (A1) and continu-
ous from 80,0000 (A2) t
low
marks the point in time, where
σ(t) is at its lowest. The speedup starts to recover (t
rec
)
during the attack and quickly reaches U
acc
and U
target
for
both A1 and A2. At tick 120,000 A1 and A2 are the same
because the attackers are fully isolated and have no further
influence.
EGO. After these WUs have been successfully cal-
culated, σ(t) recovers to the level it had before the at-
tack. In both attacks, σ (t) of the ADA recovers during
the attack until it reaches the acceptance space (i.e.
system states where the utility is above U
acc
). This
is due to the EGOs getting low trust ratings because
they abort their assigned WUs. Yet, they manage to
retain a high enough reputation to still get some WUs
computed by other agents. As 80% of the WUs held
by EGOs have to be redistributed, σ(t) of the ADA
cannot recover to the level it had before the attack.
Quantitatively, D
U
is 130,105 below the baseline
for both A1 and A2. After the attack, D
U
is 6250
for A2. D1 has a permanent influence and CM1 is
not able to fully mitigate the effect. We measured the
baseline utility U
baseline
in a reference experiment. R
a
for A1 and A2 is with 72% (see Equation 11). Similar
to, O2 in Scenario 1, only A2 fully recovers. For A1,
we calculate R
l
in an open integral in Equation 12.
Again, not comparable, R
l
for A2 can be calculated in
a closed integral (see Equation 13; the open integral
would have a value of 1).
R
a,A1
= R
a,A2
B
349, 895
480, 000
≈ 73% (11)
R
l,A1
≈
9.5
12
≈ 79% (12)
R
l,A2
B
113, 750
120, 000
≈ 95% (13)
Similarly, we run experiments for disturbance D2
with free-riding agents (see Figure 6). Since those
agents are simpler to detect, they are isolated within
the attack period of A1 and the system fully recovers
to U
target
within the attack. U
D
is 13, 056 for both A1
and A2 during the attack. After the attack ends, A1 is
already fully recovered and the utility for A1 and A2
is similar. CM1 is able to fully mitigate this distur-
bance D2. R
a
is 97% (see Equation 14). Since U (t)
fully recovers for both attacks, R
l
is about 100% for
A1 and A2.
R
a,D2
B
466, 944
480, 000
≈ 97% (14)
5 APPLICATION SCENARIO 3:
URBAN TRAFFIC
MANAGEMENT
A third scenario that is often used as basis to inves-
tigate a self-organisation mechanism due its inherent
dynamics and distributed nature is the control of traf-
fic lights in urban areas, see (Bazzan and Klügl, 2009;
Dinopoulou et al., 2006) for instance. One of the ma-
jor OC-based contributions in this context is the Or-
ganic Traffic Control (OTC) system (Prothmann et al.,
2011) that applies the observer/controller approach as
well as an autonomous and safety-oriented learning
process to the traffic domain.
In OTC, each intersection of the inner-city road
network is managed by an observer/controller in-
stance that gathers detector data about the underly-
ing traffic conditions (in terms of flows passing each
turning movement) and reacts by adapting green dura-
tions. The success of the control strategy is typically
expressed as flow-weighted delays:
t
D
=
∑
i
(M
i
× t
d,i
)
∑
i
M
i
(15)
Where M
i
corresponds to the current traffic flow at the
i-th turning of the observed intersection and t
d,i
de-
notes the average waiting time with respect to a single
turning t
i
. This metric is also referred to as Level of
Service (LoS) Transportation Research Board (2000).
In addition, the same metric is used to determine the
most promising progressive signal system Tomforde
et al. (2010).
Adapting traffic signalisation to changing de-
mands and coordinating intersection controllers pro-
vides a first step towards robustness – but this does
not dissolve the initial disturbance. In terms of the
previously developed notion, this accounts as pas-
sive robustness. Re-routing of traffic participants
counters the disturbance (i.e. a blocked road or
traffic jams) directly and can be considered as ac-
tive robustness mechanism in this context. In pre-
vious work, we equipped OTC with such a mecha-
nism Prothmann et al. (2012). Based on ideas re-
sembling the Link State or Distance Vector Routing
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
46

protocols as known from the computer networks do-
main(Tanenbaum, 2002), information about the short-
est routes are exchanged between intersection con-
trollers and provided to drivers at each incoming inter-
section, see Prothmann et al. (2011, 2012) for details.
54 H. Prothmann et al.
currently best paths to all destinations are known and can be stored in the
routing tables that are associated with the intersection approaches. Like for the
DVR protocol, the table entries contain the destination, the recommended next
turning, and the estimated travel time to the destination.
5 Evaluation
To evaluate the potential benefits of a DRG system, OTC-controlled intersections
with and without their RCs have been compared in a simulation study.
5.1 Experimental Setup
Fig. 1. Network map (incl. incident location)
The evaluation has been con-
ducted for a simulated network
that is illustrated in Fig. 1.
The network consists of three
Manhattan-type sub-networks. It
contains 27 signalised intersec-
tions (depicted as circles) and
28 prominent destinations (de-
picted as diamonds). Within each
sub-network, the intersections are
connected by one-laned road seg-
ments of 250 mlengththatpro-
vide two additional turning lanes
starting 100 m before an intersection. Regions are connected by two-laned roads.
Signalised intersections are operated by an observer/controller (see Sect. 3)
and can provide route recommendations for the prominent destinations. Each
destination also serves as origin for traffic entering the network. Two scenarios
are investigated:
– In the regular scenario, eight vehicles per hour travel from every origin to
every destination. In total, 6048 vehicles traverse the network in every hour.
Since this demand does not cause significant jams at the network’s intersec-
tions, the scenario allows to evaluate the impact of DRG under uncongested
conditions. It is simulated for a period of three hours.
– In the incident scenario, the same amount of traffic traverses the network.
However, one of the roads connecting two sub-networks is temporarily blocked
due to an incident (see Fig. 1). The blockage affects both directions of the
road, occurs after 15 minutes and lasts for 20 minutes within the two hour
simulation period. The incident scenario allows to evaluate the benefit of
DRG in the presence of disturbances.
As the literature reports a widely varying driver acceptance for VMS-based
route recommendations [4, 5], acceptance rates of 0.125 (low), 0.375 (medium),
Figure 7: An exemplary model of 27 intersections (depicted
as grey circles), forming three connected Manhattan-style
road networks. Traffic enters and leaves the network at lo-
cations referred to as destinations (depicted as light-grey di-
amonds). In the evaluation, the red road is blocked during
attack A1.
In this scenario, the objective is to maximise the
utility function traffic flow which can be measured
globally. At t
z
, one road is blocked until t
z
(attack
A1, red road in Figure 7). We compare three different
control mechanisms:
CM0 No active control mechanism. Used as base-
line.
CM1 OTC without routing.
CM2 OTC with routing.
The evaluation has been conducted for a simu-
lated network that is illustrated in Figure 7. The net-
work consists of three Manhattan-type sub-networks.
It contains 27 signaled intersections (depicted as cir-
cles) and 28 prominent destinations (depicted as dia-
monds). Within each sub-network, the intersections
are connected by one-laned road segments of 250m
length that provide two additional turning lanes start-
ing 100m before an intersection. Regions are con-
nected by two-laned roads. Signalised intersections
are operated by an observer/controller (i.e. OTC) and
can provide route recommendations for the prominent
destinations. Each destination also serves as origin for
traffic entering the network.
We configured the simulation as follows: eight
vehicles per hour travel from every origin to every
destination. Since this demand does not cause sig-
nificant jams at the network’s intersections, the sce-
nario allows evaluating the impact of routing mecha-
nisms under uncongested conditions. As disturbance,
we temporarily blocked one of the roads connecting
two sub-networks due to an incident (see mark in
Figure 7). The blockage affects both directions of
the road, occurs after 25 min and lasts for 40 min
within the simulation period. The incident scenario
allows analysing the impact of the two different adap-
tation mechanisms (CM1 = OTC without routing, and
CM2 = OTC with routing) in comparison to a stan-
dard fixed-time control approach (= CM0).
Within the professional simulator Aimsun Barceló
et al. (2005), we performed five runs of experiments
for each instance under evaluation and computed av-
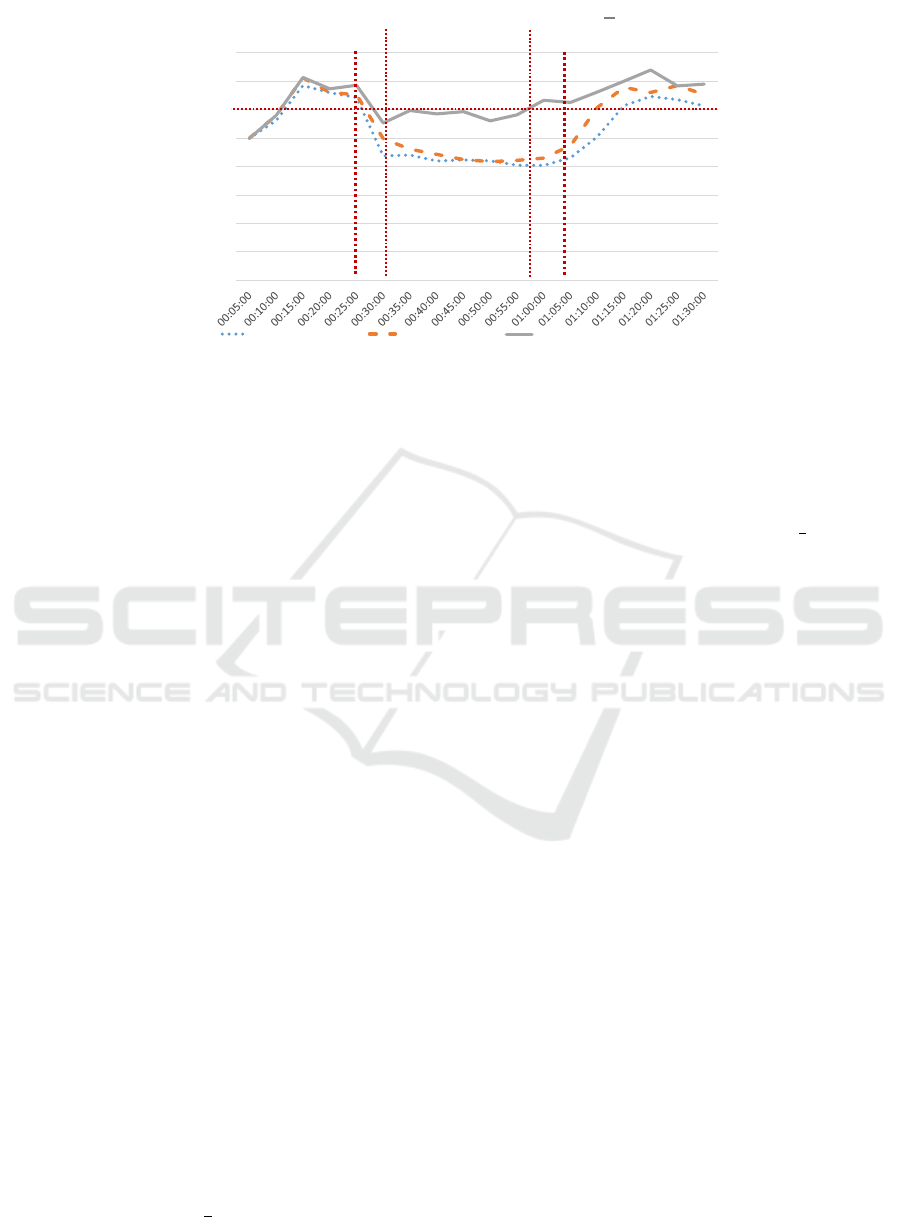
erages. Figure 8 depicts the achieved results. We can
clearly observe that the typical system behaviour of
a disturbed and recovering system is visible in this
scenario. When considering the OTC system without
routing in comparison to a standard fixed-time con-
trol, we can distinguish two effects: a) the fixed-time
controller (i.e. CM0) defines the base-line (i.e. the
maximum loss of utility) and b) the standard OTC sys-
tem (CM1) already provides a permanent robustness
increase that improves the behaviour even if no dis-
turbance takes place. If activating the routing mech-
anism (CM2), an active robustness is added. Quan-
titatively, U
D
for CM1 is about 5.4% better than the
reference solution (CM0) (i.e. 5534 vs 5250 vehicles
per hour) and routing (CM2) adds further utility, i.e.
an improvement in U
D
of 14.0% (i.e. 6312 vehicles
per hour).
U
baseline
(t) B 7, 000
vehices
h
= 116.7
vehicles
min
(16)
R
a,CM0
B
87.5
116.7
≈ 75% (17)
R
a,CM1
B
92.2
116.7
≈ 79% (18)
R
a,CM2
B
105.2
116.7
≈ 90% (19)
To calculate the robustness, we use a baseline based
on U
target
(see Equation 16). Using the U
D
values from
above, we calculate the robustness R
a
for all CMs in
Equations (17) to (19). What we can see in the fig-
ure is that a passive robustness is already in place
with CM0, since most of the network is still operat-
ing without strong impact of the disturbance (in terms
of traffic flow through the network). This changes
if we just consider the blocked link: Here, for all
three mechanisms the utility drops to zero and recov-
ers immediately when the blockade is removed (not
shown in figure). Hence, the robustness is achieved
at network-level, since participants are routed using
the best available link (i.e. with routing mechanism,
CM2) or at least the non-affected participants benefit
due to longer green durations (i.e. a blocked road re-
ceives a lower fraction of the phase cycle time when
using OTC, CM1 and CM2). With this mechanism
at hand, we are now able to compare the developed
Quantitative Robustness â
˘
A¸S A Generalised Approach to Compare the Impact of Disturbances in Self-organising Systems
47
0
1000
2000
3000
4000
5000
6000
7000
8000
time in min
Utility: Traffic flow in veh/h
Fixed-time Control OTC w/o routing OTC w/ routing
𝑡
𝑧
𝑡
ҧ
𝑧
𝑡
𝑎𝑐𝑐
(for )
𝑡
𝑙𝑜𝑤
𝑈
𝑎𝑐𝑐
Figure 8: Utility over time for OTC. At t
z
one road is blocked (attack A1) and traffic has to be redirected. With fixed-
time control (CM0), utility drops by nearly 3,000 vehicles per hour. OTC without routing (CM1) performs slightly better.
Compared, OTC with routing (CM2) only drops about 1,000 vehicles per hour. After the attack A1 ends, all CMs recover the
system to their previous utility.
mechanisms to other solutions from the state-of-the-
art (such as Wedde et al. (2007) for self-organised
routing or Dinopoulou et al. (2006) for autonomous
traffic controllers) and quantify the varying robust-
ness levels in different disturbance scenarios.
6 DISCUSSION
We demonstrated that our approach is applicable to
three varying scenarios from different application do-
mains. In Scenario 1, we compared three different
control mechanisms with two different objective func-
tions for wireless sensor networks. The resulting val-
ues are reasonable and allow for a simple and effec-
tive comparison of robustness levels for the consid-
ered CMs. In Scenario 2, we compared two different
attack types and two different disturbances in a grid
scenario. We measured the long-term influence for
the disturbances and found that only one of the dis-
turbances has a permanent effect. Afterwards, in Sce-
nario 3, we measured the robustness for three CMs in
a traffic management scenario.
The general shape of the utility graph was very
similar in all our scenarios. Still, the utility degrada-
tion U
D
is not comparable between scenarios because
it has an application specific unit (i.e. it is hard to
compare apples and oranges). However, our robust-
ness metrics R
a
and R
l
are unit free and always have
the same boundaries. Thus, they allow some compar-
ison between different systems.
Nevertheless, some limitations apply: We have to
set a fixed attack length t
z
− t
z
. This limits the appli-
cability of the concepts to those cases where a distur-
bance is observable in the first place. Current research
addresses this topic by developing techniques to deal
with this issue. Also, it influences the value of R as
illustrated by Scenario 2. If we had set t
z
, earlier the
robustness R
a
for both CMs would be lower. A simi-
lar challenge occurs when calculating R
l
for two CMs
which reach U
target
at different times. To make their
robustness R
l
values comparable, a later t
target
has to
be chosen. This issue can be solved but it requires
some caution when designing experiments.
We noticed another challenge when calculating R
l
for O2 in Scenario 1 because our goal was to minimise
the metric. However, for a utility function U (t) a
higher value should be better. Hence, we had to invert
the objective function to calculate the utility. There
is no need to normalise the utility function but larger
values must be better which is important to keep the
robustness values inside the interval between 0 and 1.
Finally, we saw in Scenario 1 that it is crucial to
choose the right utility function. If we only consider
O1, A1 has the best robustness. However, if we also
take into account O2, A2 is clearly better. The re-
maining challenge here is to properly combine multi-
ple metrics.
In future work, we will focus on quantitatively
comparing similar mechanisms in different applica-
tion scenarios. Also, we would like to extend the se-
lection of integration limits for better comparison.
7 CONCLUSION
Self-adaptation and self-organisation are concepts in-
creasingly incorporated in system design. This is
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
48

mostly due to one key motivation: We want to im-
prove the robustness of technical systems in terms of
a utility preservation in order to maintain the system’s
functionality even under harsh external conditions or
the presence of internal failures (we refer to such ef-
fects in general as disturbances). Hence, one of the
most important aspects to judge whether one specific
solution is more beneficial than another is to estimate
which system is more robust. Such a decision process
needs a quantitative basis to come up with a mean-
ingful statement. In this paper, we presented a novel
method that estimates such a measurement at runtime.
We discussed the state-of-the-art and explained
that existing approaches have drawbacks, e.g. requir-
ing too much internal information, measuring only
certain aspects (such as the time), being application-
specific, or abstracting the robustness too far (i.e.
coming up with a discretisation of a few classes only).
With our method, we focus on externally measurable
attributes only and allow for a generalised concept
for comparing robustness. We further distinguish be-
tween a permanent part of robustness that is system
inherent and a part that is generated by internal adap-
tation mechanisms. We demonstrated the expressive-
ness of the developed approach in terms of three case
studies, i.e. from the desktop grid, the wireless sensor
network, and the traffic control domains.
In future work, we will investigate how our
method behaves when comparing different systems
within the same application domain. In addition,
we focus on questions regarding the heterogeneity
of occurring disturbances: Where are the drawbacks
and advantages of the developed technique and what
needs to be improved to come up with a fully gener-
ally applicable method?
REFERENCES
(2015). 2015 IEEE 9th International Conference on Self-
Adaptive and Self-Organizing Systems, Cambridge,
MA, USA, September 21-25, 2015. IEEE Computer
Society.
(2015). 2015 IEEE International Conference on Autonomic
Computing, Grenoble, France, July 7-10, 2015. IEEE
Computer Society.
Barceló, J., Codina, E., Casas, J., Ferrer, J., and García, D.
(2005). Microscopic traffic simulation: A tool for the
design, analysis and evaluation of intelligent transport
systems. Journal of Intelligent and Robotic Systems,
41(2–3):173–203.
Bazzan, A. L. C. and Klügl, F., editors (2009). Multi-Agent
Systems for Traffic and Transportation Engineering.
Idea Group Publishing, Hershey, PA, US.
Callaway, D. S., Newman, M. E., Strogatz, S. H., and Watts,
D. J. (2000). Network robustness and fragility: Per-
colation on random graphs. Physical review letters,
85(25):5468.
Choi, S., Buyya, R., Kim, H., and Byun, E. (2008). A
Taxonomy of Desktop Grids and its Mapping to State
of the Art Systems. Technical report, Grid Comput-
ing and Dist. Sys. Laboratory, The University of Mel-
bourne.
Di Marzo Serugendo, G. (2009). Stabilization, Safety, and
Security of Distributed Systems: 11th International
Symposium, SSS 2009, Lyon, France, November 3-6,
2009. Proceedings, chapter Robustness and Depend-
ability of Self-Organizing Systems - A Safety Engi-
neering Perspective, pages 254–268. Springer Berlin
Heidelberg, Berlin, Heidelberg.
Dinopoulou, V., Diakaki, C., and Papageorgiou, M. (2006).
Applications of the urban traffic control strategy
tuc. European Journal of Operational Research,
175(3):1652–1665.
Eberhardinger, B., Anders, G., Seebach, H., Siefert, F., and
Reif, W. (2015). A research overview and evalua-
tion of performance metrics for self-organization al-
gorithms. In 2015 IEEE International Conference
on Self-Adaptive and Self-Organizing Systems Work-
shops, SASO Workshops 2015, Cambridge, MA, USA,
September 21-25, 2015, pages 122–127.
Edenhofer, S., Stifter, C., Jänen, U., Kantert, J., Tomforde,
S., Hähner, J., and Müller-Schloer, C. (2015). An
accusation-based strategy to handle undesirable be-
haviour in multi-agent systems. In 2015 IEEE Interna-
tional Conference on Autonomic Computing, Greno-
ble, France, July 7-10, 2015, pages 243–248.
Holzer, R. and de Meer, H. (2009). Quantitative model-
ing of self-organizing properties. In Self-Organizing
Systems, 4th IFIP TC 6 International Workshop, IW-
SOS 2009, Zurich, Switzerland, December 9-11, 2009.
Proceedings, pages 149–161.
Holzer, R. and de Meer, H. (2011). Methods for approxima-
tions of quantitative measures in self-organizing sys-
tems. In Self-Organizing Systems - 5th International
Workshop, IWSOS 2011, Karlsruhe, Germany, Febru-
ary 23-24. 2011. Proceedings, pages 1–15.
IBM (2005). An architectural blueprint for autonomic com-
puting. Technical report, IBM.
Jalote, P. (1994). Fault tolerance in distributed systems.
Prentice-Hall, Inc.
Kantert, J., Edenhofer, S., Tomforde, S., Hähner, J.,
and Müller-Schloer, C. (2016a). Normative Con-
trol – Controlling Open Distributed Systems with Au-
tonomous Entities, volume 7 of Autonomic Systems,
pages 87–123. Springer International Publishing.
Kantert, J., Reinhard, F., von Zengen, G., Tomforde, S.,
Wolf, L., and Müller-Schloer, C. (2016b). Combin-
ing Trust and ETX to Provide Robust Wireless Sen-
sor Networks. In Varbanescu, A. L., editor, Work-
shop Proceedings of the 29th International Confer-
ence on Architecture of Computing Systems, chap-
ter 16, pages 1–7. VDE Verlag GmbH, Berlin, Offen-
bach, DE, Nuremberg, Germany.
Klejnowski, L. (2014). Trusted Community: A Novel Mul-
tiagent Organisation for Open Distributed Systems.
PhD thesis, Leibniz Universität Hannover.
Quantitative Robustness â
˘
A¸S A Generalised Approach to Compare the Impact of Disturbances in Self-organising Systems
49

Menascé, D. A., Bennani, M. N., and Ruan, H. (2005).
Self-star Properties in Complex Information Systems:
Conceptual and Practical Foundations, chapter On
the Use of Online Analytic Performance Models, in
Self-Managing and Self-Organizing Computer Sys-
tems, pages 128–142. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Mnif, M. and Müller-Schloer, C. (2006). Quantitative
Emergence. In Proceedings of the 2006 IEEE Moun-
tain Workshop on Adaptive and Learning Systems
(SMCals 2006), held 24 Jul - 26 Jul 2006, Utah State
University College of Engineering Logan, UT, USA,
pages 78–84, Piscataway, NJ, USA. IEEE.
Nafz, F., Seebach, H., Steghöfer, J.-P., Anders, G., and Reif,
W. (2011). Constraining Self-organisation Through
Corridors of Correct Behaviour: The Restore In-
variant Approach. In Müller-Schloer, C., Schmeck,
H., and Ungerer, T., editors, Organic Computing –
A Paradigm Shift for Complex Systems, Autonomic
Systems, pages 79 – 93. Birkhäuser Verlag, Basel,
Switzerland.
Nimis, J. and Lockemann, P. C. (2004). Robust multi-agent
systems: The transactional conversation approach. In
First International Workshop on Safety and Security in
Multiagent Systems (SASEMAS’04), S, pages 73–84.
Prothmann, H., Tomforde, S., Branke, J., Hähner, J.,
Müller-Schloer, C., and Schmeck, H. (2011). Or-
ganic Traffic Control. In Organic Computing – A
Paradigm Shift for Complex Systems, pages 431 – 446.
Birkhäuser Verlag.
Prothmann, H., Tomforde, S., Lyda, J., Branke, J., Hähner,
J., Müller-Schloer, C., and Schmeck, H. (2012). Self-
organised Routing for Road Networks . In Proc. of the
International Workshop on Self-Organising Systems
(IWSOS’12), held in Delft, The Netherlands, March
15 - 16, 2012, number 7166 in LNCS, pages 48 – 59.
Springer Verlag.
Schmeck, H., Müller-Schloer, C., Çakar, E., Mnif, M., and
Richter, U. (2010). Adaptivity and Self-organisation
in Organic Computing Systems. ACM Transactions on
Autonomous and Adaptive Systems (TAAS), 5(3):1–32.
Scholl, A. et al. (2000). Robuste planung und optimierung:
Grundlagen, konzepte und methoden; experimentelle
untersuchungen. Technical report, Darmstadt Tech-
nical University, Department of Business Administra-
tion, Economics and Law, Institute for Business Stud-
ies (BWL).
Slotine, J.-J. E., Li, W., et al. (1991). Applied nonlinear
control, volume 199. Prentice-Hall Englewood Cliffs,
NJ.
Taguchi, G. (1993). Robust technology development. Me-
chanical Engineering-CIME, 115(3):60–63.
Tanenbaum, A. S. (2002). Computer Networks. Pearson
Education, 4th edition.
Tomforde, S., Prothmann, H., Branke, J., Hähner, J., Mnif,
M., Müller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and Control of Organic Systems.
In Organic Computing - A Paradigm Shift for Complex
Systems, pages 325 – 338. Birkhäuser Verlag.
Tomforde, S., Prothmann, H., Branke, J., Hähner, J.,
Müller-Schloer, C., and Schmeck, H. (2010). Possi-
bilities and limitations of decentralised traffic control
systems. In 2010 IEEE World Congress on Computa-
tional Intelligence (IEEE WCCI 2010), pages 3298–
3306. IEEE.
Transportation Research Board (2000). Highway capacity
manual. Technical report, National Research Council,
Washington D.C., US.
Wedde, H. F., Lehnhoff, S., et al. (2007). Highly dy-
namic and adaptive traffic congestion avoidance in
real-time inspired by honey bee behavior. In Hol-
leczek, P. and Vogel-Heuser, B., editors, Mobilität und
Echtzeit – Fachtagung der GI-Fachgruppe Echtzeit-
systeme, pages 21–31. Springer.
Winter, T., Thubert, P., Brandt, A., Hui, J., Kelsey, R.,
Levis, P., Pister, K., Struik, R., Vasseur, J., and
Alexander, R. (2012). RPL: IPv6 Routing Protocol
for Low-Power and Lossy Networks. RFC 6550 (Pro-
posed Standard).
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
50
