
A Real–time Global Illumination Approach for High Resolution
Reflective Shadow Maps in Open World Scenes
Daniel Bischoff, Tobias Schwandt and Wolfgang Broll
Ilmenau University of Technology, Virtual Worlds and Digital Games Group, Ehrenbergstraße 29, Ilmenau, Germany
Keywords:
Global Illumination, Indirect Lighting, Real–time Rendering, Bidirectional Reflective Shadow Maps, Open
World.
Abstract:
The complexity of offline and real–time rendering of global illumination effects is a vast field of research.
Covering the complexity of dynamic open–world environments with changing light conditions and moving
objects is challenging in real–time rendering. Especially the quality of light properties needs to be physically
correct and sufficiently fast even if the light and environment conditions are changing. In this paper, we
present a fast global illumination approach suitable to achieve indirect lighting using high–resolution reflective
shadow maps in real time. Based on LightSkin, we present an enhancement applying bidirectional shadow
maps to improve the quality of shadows and global illumination effects in open–world environments. A
novel combination of accumulating virtual area lights from the reflective shadow map with an indirect light
representation using LightSkin’s proxy light sources shows a significant improvement. In an urban scene
typical for open–world environments, the proposed approach is up to approx. 12 times faster than the original
LightSkin approach. This makes our novel approach suitable for high–quality indoor as well as outdoor global
illumination.
1 INTRODUCTION
Indirect illumination contributes signficantly to the
overall quality of rendered images - in particular as
it increases their plausiblity. However, due to its rat-
her high rending costs, it is generally difficult to pro-
vide sophisticated results in real-time. In particular
the specific requirements for providing indirect illu-
mination for open-world scenes in real-time were wi-
dely neglected by previous research.
Particularly light types like the sun usually have
a shadow map size of 1024 × 1024px or higher.
This high resolution is difficult to render in case of
Reflective Shadow Maps (RSMs) and Global Illu-
mination (GI), since the na
¨
ıve approach is to light
each frame buffer pixel by each virtual light de-
ducted from the RSM. Consequently this leads to a
high computational complexity. An option is to pre–
compute the lighting reducing the per frame com-
plexity. However, dynamically changing objects or
light conditions in the environment cannot be suppor-
ted. Modern applications—like open–world compu-
ter games—consist of many integrated objects that are
affected by environment properties like weather con-
ditions, the position of the sun, or even clouds. The-
refore, an on–the–fly rendering of dynamically chan-
ging open–world environments with GI needs to be
addressed to enhance the visual output in terms of re-
alism and physical correctness.
Similar to (Ritschel et al., 2011), we employ a
reduced representation of the RSM for accumula-
ting indirect light. This paper combines sampling
the RSM using Bidirectional Reflective Shadow Maps
(BRSMs) introduced in (Ritschel et al., 2011) with the
coarse model representation introduced along with
the LightSkin GI approach (Lensing, 2014; Lensing
and Broll, 2013b). The indirect light is accumula-
ted for a set of sparsely distributed light caches rat-
her than all surface points and subsequently interpo-
lated for the remaining surface points. A reduction of
the amount of virtual lights is achieved by an impor-
tance sampling strategy. This allows us to use high–
resolution RSMs in complex scenes while maintai-
ning real–time frame rates. Apart from the contribu-
tion to open–world scenarios, our approach is appli-
cable for GI in general.
This paper is structured as follows: in Section 2
we investigate related work and indicate where our
novel contributions differ from previous approaches.
Section 3 presents our approach for sampling large
116
Bischoff D., Schwandt T. and Broll W.
A Realâ
˘
A ¸Stime Global Illumination Approach for High Resolution Reflective Shadow Maps in Open World Scenes.
DOI: 10.5220/0006135601160126
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 116-126
ISBN: 978-989-758-224-0
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

RSMs more efficiently and dynamically. In Section 4,
we provide details on our approach combining the
principles of LightSkin and BRSMs while Section 5
& Section 6 present an evaluation of the results we
achieved along with the limitations that are still in
place. Finally, Section 7 concludes our findings and
gives a prospect on future work.
2 RELATED WORK
Indirect Lighting
Global illumination is a very comprehensive field of
research. As early as 1997, Alexander Keller (Keller,
1997) described the first rendering technique to com-
pute global illumination in textured scenes. Based on
quasi–random walk and a Monte Carlo integration he
achieves physically correct results. This algorithm
has a complexity of O(NK) where N is the number
of rays and K the number of elements in the scene.
However, ray–based approaches or radiosity are not
suitable for real–time graphic applications because of
the requirements, especially with open–world scena-
rios in mind.
Dachsbacher and Stamminger presented an appro-
ach called Reflective Shadow Maps in 2005 (Dachs-
bacher and Stamminger, 2005). It extends shadow
maps by additional buffers that hold world position,
normal values, and the color of the surfaces being lit
by the light source. The additional buffers are used in
combination with a screen–space technique to achieve
interactive frame rates even for complex scenes. This
approach provides the basis of many of the following
rendering techniques.
Ritschel et al. presented Imperfect Shadow Maps
(ISMs) (Ritschel et al., 2008) which create low–
resolution shadow maps rendered around the current
camera based on Virtual Point Lights (VPLs). A fi-
nally generated shadow map atlas is used for indi-
rect illumination in fully dynamic scenes. Using point
sampling shows to be sufficient in most cases, but has
some disadvantages in terms of accuracy.
A study by Kaplanyan & Dachsbacher demon-
strated the possibilities of using lattices and Spheri-
cal Harmonics (SH) based on RSMs (Kaplanyan and
Dachsbacher, 2010). Overall, a computation time
of a few milliseconds can be reached without requi-
ring pre–computation. Based on a grid–based lighting
they achieve single–bounce indirect illumination with
occlusion. The Light Propagation Volumes (LPV)
lookup inside the cascaded grids is the most expen-
sive part of the approach.
Crassin et al. have presented the Voxel Cone Tra-
cing (VCT) method (Crassin et al., 2011). It is ba-
sed on a pre–filtered voxel representation of the scene.
They use a voxel–based cone that corresponds to the
individual mipmap levels of the pre–integrated scene.
Therefore, only a small number of sampling rays is
required as they can be approximated via the cone.
Lensing & Broll addressed global illumination in
terms of diffuse and glossy surfaces by a new ap-
proach called LightSkin (Lensing and Broll, 2012;
Lensing and Broll, 2013b; Lensing and Broll, 2013a;
Lensing, 2014). It is based on ideas from irradi-
ance caching (Ward et al., 1988) and radiance caching
(K
ˇ
riv
´
anek et al., 2005) as it interpolates the indirect
light from so called light caches. These caches are
distributed in model space during a per–model pre–
computation step which can be parametrized accor-
ding to the desired density.
With a RSM from the light source, indirect lights
are generated as Virtual Area Lights (VALs). The ge-
nerated caches are used to compute diffuse and glossy
incident lighting by accumulating the indirect light
from the RSM into two proxy light sources for each
cache, one representing diffuse light and the other re-
presenting glossy light. Moreover, the caches’ proxy
lights are attenuated to account for occlusion by a
double–projection method that approximates occlu-
sion computation efficiently. The final output is gene-
rated by interpolating the accumulated lighting from
the proxy lights to the surface points in the vicinity of
a cache.
However, for a single surface point, the proxy lig-
hts of several surrounding caches are used and weigh-
ted according to their contribution. The approach de-
livers plausible results with reasonable performance
and is applicable to virtual and mixed reality scena-
rios when RSM sizes are small compared to com-
monly used shadow map resolutions, e.g. for 128
2
or 256
2
px.
Our analysis of the approach shows that high–
resolution reflective shadow maps result in signifi-
cantly lower frame rates, since all of the pixels in the
RSM are used as virtual lights for cache lighting.
A new radiance caching approach from Vardis,
Papaioannou & Gkaravelis combines a radiance field
chrominance with an optimized cache population
scheme (Vardis et al., 2014). The main idea is to ge-
nerate caches only on surface that finally contribute to
the result.
Laurent et al. use a stochastic decimation process
chained with a partitioning strategy (Laurent et al.,
2016). For every triangle inside the scene, a proper
VPL is considered. The approach doesn’t need any
A Realâ
˘
A¸Stime Global Illumination Approach for High Resolution Reflective Shadow Maps in Open World Scenes
117

pre–computation and can be used for dynamic scenes
as well.
Importance Sampling
Of the many different approaches associated with the
use of importance sampling, we would like to mention
Monte-Carlo Simulation, pseudo-random, and Perlin
noise textures (Anderson, 1999; Green, 2005). They
allow an efficient sampling of virtual light sources.
Moreover, Dachsbacher & Stamminger develo-
ped an importance sampling strategy based on RSMs
improving the performance significantly (Dachsba-
cher and Stamminger, 2006). Using a resolution of
512 × 512 px for the final image and indirect lights,
37 frames per seconds can be reached. This is not
sufficient for our needs of a high–resolution output.
Ritschel et al. presented a view–adaptive appro-
ach for imperfect shadow maps by using BRSMs
(Ritschel et al., 2009; Ritschel et al., 2011). Depen-
ding on the current camera view, a set of potentially
influencing VPLs is estimated. Hereby, high frame
rates can be achieved even in large scenes. However,
for occlusion evaluation, ISMs are used which are ba-
sed on a point–based representation of the scene and,
thus, provide an approximated visibility evaluation.
Prutkin, Kaplanyan & Dachsbacher present a
method called Reflective Shadow Map Clustering
(RSMC) for clustering VPLs (Prutkin et al., 2012).
In contrast to BRSMs, they use VALs instead of
VPLs. Overall, a single frame can be provided in
140 − 250ms depending on the number of clusters
and RSM size. The importance sampling is similar
to BRSMs and provides a decent quality for com-
plex scenes. Nevertheless, the performance of ren-
dering indirect lights is not sufficient in case of high–
resolution shadow maps.
Another filtering method was presented by Bar
´
ak,
Bittner & Havran (Bar
´
ak et al., 2013). They develo-
ped an adaptive sampling of VPLs based on G–buffer
information. It is based on Metropolis–Hastings sam-
pling. In comparison to BRSMs, this approach exhi-
bits better temporal coherence.
With an heuristic sampling Hedman, Karras & Le-
htinen indroduced an efficient VPL distribution using
multiple frames (Hedman et al., 2016). Basically,
they achieve a significant performance boost by reu-
sing VPLs from previous frames and creating new
VPLs if necessary.
3 EFFICIENT LIGHTING WITH
RSMs
Among the methods summarized in the previous
section, one approach stands out due to its method
of accumulating and applying indirect light to sur-
faces: LightSkin uses light caches for indirect light
accumulation and subsequently interpolates the accu-
mulated results for the remaining surface points. This
is a quite efficient approach to avoid shading each
pixel in the viewbuffer by each virtual light deducted
from the RSM. However, LightSkin uses each pixel
in the RSM as a VAL. Therefore, this work focuses
on sampling the RSM more efficiently by employing
Bidirectional Reflective Shadow Maps as presented in
(Ritschel et al., 2011) and adapt the LightSkin rende-
ring pipeline to use only a selected subset of VALs
for computing the proxy light parameters. In order
to make our work easier to understand, we provide a
short summary of the LightSkin method presented in
(Lensing, 2014; Lensing and Broll, 2013b) first, and
subsequently, we discuss its drawbacks.
LightSkin Overview
Cache Distribution
As mentioned earlier, LightSkin requires caches to
be distributed on the scene objects in model space.
With our implementation, this is performed in a pre–
computation step for each model. For this step, two
control parameters may be used to affect the distri-
bution results: the maximum distance between cache
and surface point d
ε
, and the maximum angular dif-
ference between cache and surface normal ϑ
ε
. The
main steps for cache generation are:
1. The model is voxelized into cubes with an edge
length of
d
ε
/2.
2. Surface normals are clustered into bins in a nor-
mal container. These bins hold every normal in a
voxel that matches the bin’s direction.
3. For each voxel, the normal bin representing the
largest surface in the voxel is selected. A cache’s
normal and position are averaged by taking into
account the points with normals deviating less
than an angle of ϑ
ε
from the bin’s center normal.
The surfaces that have been used for averaging are
removed from the normal container. This proce-
dure is repeated until the normal containers are
empty.
4. Optionally, the caches are snapped to existing tri-
angles in case they are “floating”.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
118

5. In a final step, caches with similar properties (ge-
nerated in separate voxels) are joined.
For each cache, the position in model space (3 com-
ponents), normal (3 components), represented area
(float), and reflection coefficient (float) are stored in
two RGBA32F textures.
Cache Lighting
In order to generate the proxy lights that represent
the incident indirect light to a cache, first, virtual
light sources are generated by rendering a reflective
shadow map for the light source. However, instead of
virtual point lights, rather virtual area lights are used.
The area of each VAL is estimated by the projective
area A
disk
of the RSM pixel according to
A
disk
= z
2
xl
w
near
h
near
z
2
near
w
RSM
h
RSM
, (1)
where z
xl
denotes the distance between the surface
point and the camera and w
near
, h
near
, and z
near
de-
note the width, height and depth of the near clipping
plane while w
RSM
and h
RSM
hold the width and height
of the RSM. Using a simple shape like a disk allows
using form factors as analytical solutions for integra-
tion over the surface area in later computation steps.
Proxy Lights Generation
For each of the pre–computed caches, in each frame,
two proxy light sources are generated. One represen-
ting the diffuse indirect light and the other represen-
ting the glossy indirect light. To this end, the reflected
light at surface point x in the direction ω is split up
into two separate components:
L
o
(x,ω) = L
o,d
(x,ω) +L
o,g
(x,ω), (2)
where L
o
is the overall outgoing luminance, L
o,d
and
L
o,g
are the diffuse and glossy components respecti-
vely. Lensing computes these components according
to
L
o,d
(x) ≈
N
VAL
∑
j=1
Φ
l
, j
ρ
d
π
·
cos
+
ϑ
l
cos
+
ϑ
x
A
l
, j
+ π
x
l
, j
− x
2
,
(3)
and
L
o,g
(x,ω) ≈
N
VAL
∑
j=1
Φ
l
, j
ρ
g
(k + 2)cos
k
ϑ
e
2π
·
cos
+
ϑ
l
cos
+
ϑ
x
A
l
, j
+ π
x
l
, j
− x
2
,
(4)
where N
VAL
is the number of RSM pixels, Φ
l
is the
light flux of the VAL, ρ
d
and ρ
g
are the diffuse and
glossy color respectively, and x
l
is a single VAL’s po-
sition. ϑ
l
is the angle between the light’s normal and
the vector from the light’s center to the surface point
x, ϑ
x
is the angle between the surface normal and the
vector from the surface point to the light’s center, ϑ
e
is the angle between the view direction and the re-
flection vector while k is the reflection exponent and
A
l
is the area of a VAL. We let cos
+
denote the cosine
clamped to values above zero.
Subsequently, proxy lights are created that repre-
sent this luminance at the cache position. First, the
position of the proxy lights is computed according to
x
p
=
∑
m
j=1
w(c,x
l
)x
l
, j
∑
m
j=1
w(c,x
l
)
. (5)
The weights w for the diffuse and glossy term are
computed differently according to
w
j, d
(c) = ε
p
+ F
~c←l
,disk
,
w
j, g
(c) = ε
p
+ cos
k
ϑ
e
F
~c←l
,disk
,
(6)
where ε
p
is a very small, non–zero value avoiding di-
vision by zero in Equation 5 and F
~c←l
is the form fac-
tor between the VAL’s disk area and an infinitesimal
surface at the cache’s position c. Once the position is
known, the proxy light source’s flux can be computed
as
Φ
p
=
4πL
o
,VAL
(x,ω)
x
p
− c
2
f
r
(c,ω,ω
i
)(n
c
· ω
i
)
+
, (7)
where f
r
(c,ω,ω
i
) denotes the Bidirectional Reflec-
tance Distribution Function (BRDF) at the cache’s po-
sition, in viewing direction ω and incident direction
ω
i
, and n
c
is the cache’s normal. Here, we let (...)
+
denote clamping the value in parentheses to positive
values. This makes (n
c
· ω
i
)
+
the clamped dot pro-
duct. In order to create the diffuse and glossy proxy
light, Equation 3 and Equation 4 are plugged in as
L
o
,VAL
.
Interpolation using the Proxy Lights
The proxy lights of multiple caches are used to inter-
polate indirect light for the surface points in the vie-
wbuffer. However, the proxy lights are not treated as
stationary, but rather moved along with the surface
point in focus. This means interpolating both, proxy
light position and flux. To this end, the closest n ca-
ches need to be known. Lensing stores the referen-
ces of 16 adjacent caches for each vertex during the
per–model pre–computation step. The contributions
of these caches’ proxy lights need to be weighted be-
fore being applied to a surface point. These weights
are defined based on (Ward et al., 1988) and adapted
A Realâ
˘
A¸Stime Global Illumination Approach for High Resolution Reflective Shadow Maps in Open World Scenes
119
in (Lensing and Broll, 2013b; Lensing, 2014) for the
diffuse (w
0
d
) and glossy (w
0
g
) terms according to
w
0
d
(x,c) =
1 −
k
x − c
k
d
c,max
p
(n
x
· n
c
)
+
,
w
0
g
(x,c) =
1 −
k
x − c
k
d
c,max
p
(r
x
· r
c
)
+
,
(8)
where d
c,max
is the largest distance to one of the 16
caches, n
x
is the normal at the surface point x, and r
x
and r
c
are the reflection vectors (the incident light di-
rection mirrored at the surface normal) at the surface
point and cache positions.
With these weights, the interpolation of both,
proxy light position and flux, can be carried out ac-
cording to
x
v,d
=
∑
n
j=1
w
0
d
, j
(x,c)x
p
,d, j
∑
n
j=1
w
0
d
, j
(x,c)
,
Φ
v,d
=
∑
n
j=1
w
0
d
, j
(x,c)Φ
p
,d, j
∑
n
j=1
w
0
d
, j
(x,c)
.
(9)
These parameters are used to light each surface point
in the view buffer.
Occlusion
As pointed out in (Lensing and Broll, 2013b; Lensing,
2014), visibility is only evaluated for the proxy light
sources rather than all VALs representing it. Instead
of testing for a binary visibility result, the proxy lig-
hts are extended with an estimate for their geometrical
extent: an axis–aligned bounding box with an extent
of (2σ
x
,2σ
y
,2σ
z
), where σ represents the standard
deviation of the averaged VAL positions for proxy
light creation along each of the main axes. This boun-
ding box is converted to a sphere with a radius mat-
ching the largest dimension of the bounding box. In-
spired by Bunnel’s ambient occlusion computation
scheme (Bunnell, 2005), occlusion is approximated
by creating a disk for each cache with an area that
is computed after cache distribution during the pre–
computation step based on a Voronoi diagram.
Both, the bounding sphere of the proxy light
source as well as the disks of the other caches are first
projected onto a unit sphere and, subsequently, to a
unit disk centered around the target cache using the
form factors for a sphere and a disk (cf. (Lensing and
Broll, 2013b)). There, they are converted to quads
with the same area in order to simplify computing the
overlap. The amount of cache quads overlapping with
the proxy light source’s quad is then used as an esti-
mate for the occlusion of that same proxy light.
Drawbacks
The performance figures of the original LightSkin ap-
proach in (Lensing and Broll, 2013b; Lensing and
Broll, 2013a; Lensing, 2014) drop significantly if the
RSM resolution exceeds 256×256 px while rendering
scenes that contain more than 4, 000 caches. This ef-
fect can be attributed to using all virtual lights deri-
ved from the RSM for cache lighting. In open–world
scenes, RSM resolutions of 1024 × 1024 px or higher
are common, which illustrates why the original Light-
Skin approach was only suited for scenes with a rather
small extent such as mixed–reality scenes containing
a small number of virtual objects for which the algo-
rithm was originally designed.
In order to improve on this and to make the Lig-
Create the RSM as seen from the
light source with a high resolution.
Compute the bidirectional importance map.
Compute the vertical and
horizontal phase using SATs.
Retrieve the coordinates of the selected VALs.
Accumulate the contributions of the
selected VALs into LightSkin s proxy light sources
respecting importance sampling.
Interpolate the indirect light from the proxy light
sources for the remaining surface points.
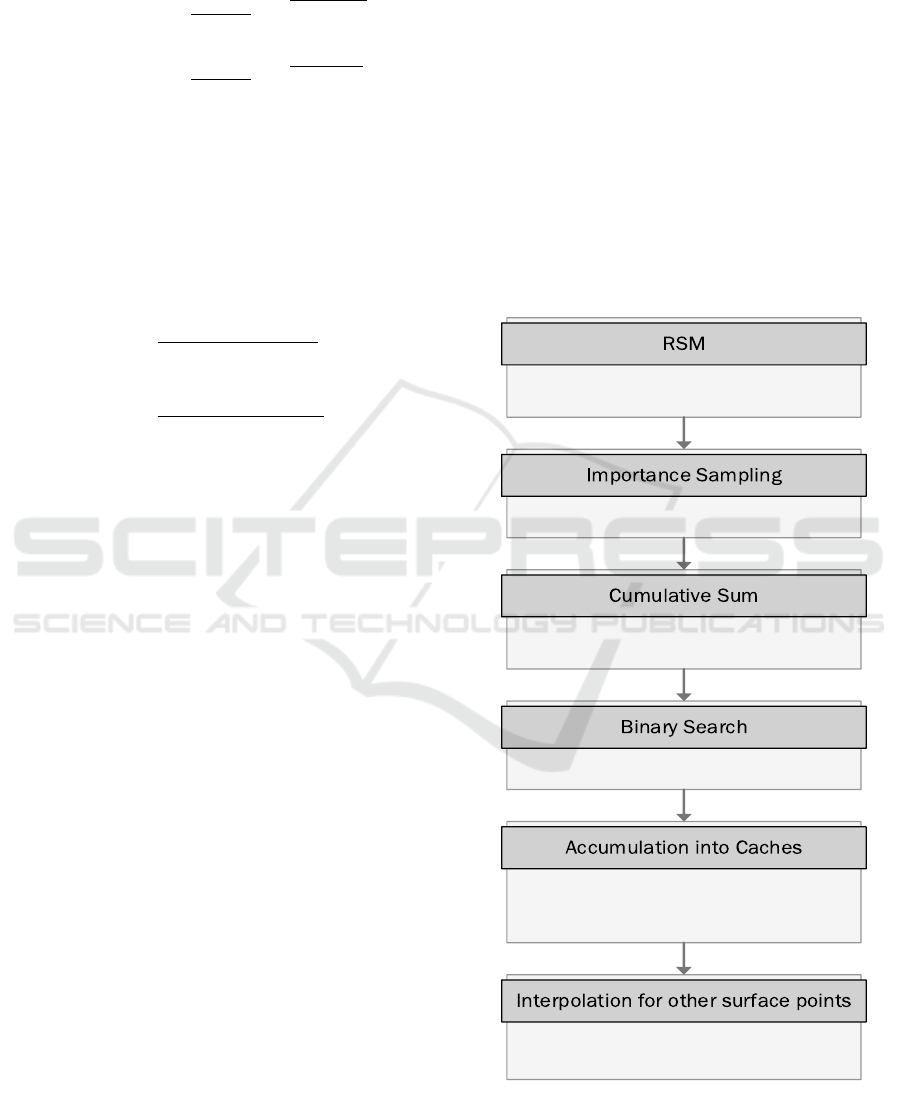
Figure 1: This figure shows the our provided pipeline for
an efficient sampling of RSMs. After performing the highly
efficient sampling using BRSMs, we combine this approach
with LightSkin.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
120

htSkin approach feasible for open–world scenes with
larger extent, we examined several approaches that
focus on finding virtual lights more efficiently, like
BRSMs (Ritschel et al., 2011) and RSMC (Prutkin
et al., 2012). Both methods rely on importance sam-
pling in combination with an efficient approach to
propagate the accumulated light into a reduced repre-
sentation of the scene.
We decided to combine the importance sampling
and virtual light selection of BRSMs with the Lig-
htSkin rendering pipeline since the additional feature
of RSMC–the area representation of VPLs–is cove-
red by the LightSkin approach already. In contrast
to RSMC, where the geometric extent of the VPLs is
transferred to polygons or discs, in (Lensing, 2014),
the geometric extent is approximated using the stan-
dard deviation of the world position of the VALs.
With our contribution combining BRSMs with the
LightSkin approach, we achieve plausible results at
real–time frame rates for RSM resolutions of up to
2048 × 2048 px.
To this end, we suggest the pipeline illustrated in
Figure 1 in order to first select a subset of VALs based
on their estimated importance. Initially, we accumu-
late the importance map into cumulative sum textures
vertically and horizontally and subsequently perform
a binary search on these cumulative sums as described
in (Ritschel et al., 2011). The selected VALs need to
be plugged into LightSkin’s indirect light accumula-
tion which means adapting the generation of proxy
lights. For the reduced subset, the contributions have
to be weighted with respect to the importance sam-
pling of the RSM. With the proxy light parameters
computed, LightSkin’s interpolation can be carried
out as described in (Lensing and Broll, 2013a; Len-
sing, 2014). The details of this pipeline are described
in the following section.
4 COMBINING LIGHTSKIN GI
WITH BRSMs
Initially, we create a traditional RSM with a high
resolution from a light source inside the scene as
described in (Dachsbacher and Stamminger, 2005).
Based on the RSM and the current view information,
we estimate the importance of each virtual light using
512 Halton–distributed view samples according to
I
VAL
=
1
N
VS
N
VS
∑
j
Φ
l
·
·
(n
l
· d
VAL→VS
)
+
· (n
VS
· (−d
VAL→VS
))
+
D(l
VAL→VS
)
,
(10)
where I
VAL
denotes the importance of a single VAL,
N
VS
is the number of view samples used for impor-
tance estimation, n
l
and n
VS
are the VAL’s and the
view sample’s normals respectively, and d
VAL→VS
is
the normalized version of the vector between the VAL
and the view sample which is denoted as l
VAL→VS
. In
the denominator, we us an expression that penalizes
importance depending on the distance between VAL
and view sample by clamping the squared distance to
values above 1, according to
D(l
VAL→VS
) =
=
(
1 if ||l
VAL→VS
||
2
< 1
||l
VAL→VS
||
2
if ||l
VAL→VS
||
2
> 1.
(11)
The resulting importance map is stored in a two–
dimensional R32F texture with the same size as the
RSM. Every pixel represents the estimated impor-
tance of one VAL. Figure 2 illustrates the importance
sampling with 512 Halton–distributed samples.
100 200 300 400
500 600
700 800 900 1,000
100
200
300
400
500
600
700
U - Coordinate [px]
V - Coordinate [px]
View Buffer Sampled with 512 Halton-distributed Samples
Figure 2: This figure shows the view buffer of size 1024 ×
768 of a street scene in which the coordinates of 512
Halton–distributed samples are illustrated. The view buffer
is sampled at these coordinates to estimate the bidirectional
importance of each VAL in the RSM.
Subsequently, we generate a cumulative sum ver-
tically and, based on that result, horizontally. We use
Summed Area Tables (SATs) to build the cumulative
sums (Crow, 1984; Hensley et al., 2005). This com-
putation can be done in O(log(n)) time with m draw
calls per dimension according to
m = ceil(log
2
(M)), (12)
A Realâ
˘
A¸Stime Global Illumination Approach for High Resolution Reflective Shadow Maps in Open World Scenes
121

where M is the number of elements along the accor-
ding dimension. One two–dimensional R32F texture
is used to store the result of the cumulative sum in
the vertical direction (same size as RSM) and anot-
her single–dimensional R32F texture is used for the
horizontal result (same width as the RSM). To find
the VAL selection, we do a binary search within an
extra draw call and store the pixel coordinates of the
selected VALs into a RG32F texture (1 × N
sVAL
) as
described in (Ritschel et al., 2011).
In order to plug the VALs indexed by these coordi-
nates into LightSkin’s rendering pipeline, the selected
subset of VALs needs to be integrated into Light-
Skin’s computation of proxy light parameters for each
cache. For each of these proxy lights, the light’s posi-
tion (Equation 5) is computed according to
x
p
=
∑
N
sVAL
j
0
=1
w(c,x
l
) · x
l
, j
0
·
1
/P
VAL
,j
0
∑
N
sVAL
j
0
=1
w(c,x
l
) ·
1
/P
VAL
j
0
. (13)
where N
sVAL
is the number of selected VALs, and
P
VAL
is the probability that the VAL is being selected
by the importance sampling.
Using this position, LightSkin computes the proxy
light’s flux according to Equation 7 where the out-
going luminance is represented as a diffuse and glossy
component (cf. Equation 2)
The components’ terms in Equation 3 and Equa-
tion 4 have to be adapted accordingly to support using
only the selected subset which, for the diffuse term,
yields
L
o,d
(x) ≈
N
sVAL
∑
j
0
=1
Φ
l
, j
0
ρ
d
π
·
·
cos
+
ϑ
l
cos
+
ϑ
x
A
l
, j
0
+ π
x
l
, j
0
− x
2
·
1
P
VAL
,j
0
,
(14)
and consequently for the glossy term
L
o,g
(x,ω) ≈
N
sVAL
∑
j
0
=1
Φ
l
, j
0
ρ
g
(k + 2)cos
k
ϑ
e
2π
·
·
cos
+
ϑ
l
cos
+
ϑ
x
A
l
, j
0
+ π
x
l
, j
0
− x
2
·
1
P
VAL
,j
0
.
(15)
By these modifications, the existent LightSkin
rendering pipeline is extended to enable compatibility
with BRSM–based VAL selection. With the compu-
ted parameters for each of the two (diffuse and glossy)
proxy lights representing the incident light at each ca-
che, the interpolation can be carried out as described
in Section 3. Subsequently, the incident light at each
cache is occluded with the double–projection method
summarized earlier. The resulting scene is lit with in-
direct diffuse and glossy light with indirect occlusion,
the quality of which depends on cache density.
5 RESULTS
To assess the results and as a reference for the perfor-
mance, we use the original LightSkin approach (accu-
mulating all VALs) as a comparison. LightSkin has
been compared to other state–of–the–art methods and
ground truth data extensively in (Lensing, 2014; Len-
sing and Broll, 2013b). Our method is an extension
to this approach to enhance the performance of indi-
rect lighting without losing visual quality. Therefore,
we evaluate our approach by comparing our results
to the standard LightSkin approach. For our evalua-
tion, we examined several levels of RSM resolutions:
square buffers with sizes of 128
2
, 256
2
, 512
2
, 1024
2
,
and 2048
2
pixels. These were each reduced to sub-
sets of different sizes: 2048, 4096, and 8192 VALs
were selected by importance sampling the RSM. For
all these computations, we used 512 view samples for
importance estimation. However, we also examined
the results for reducing that number to 256 in order to
gain performance with larger selection sets in high–
resolution RSMs as described later in this section.
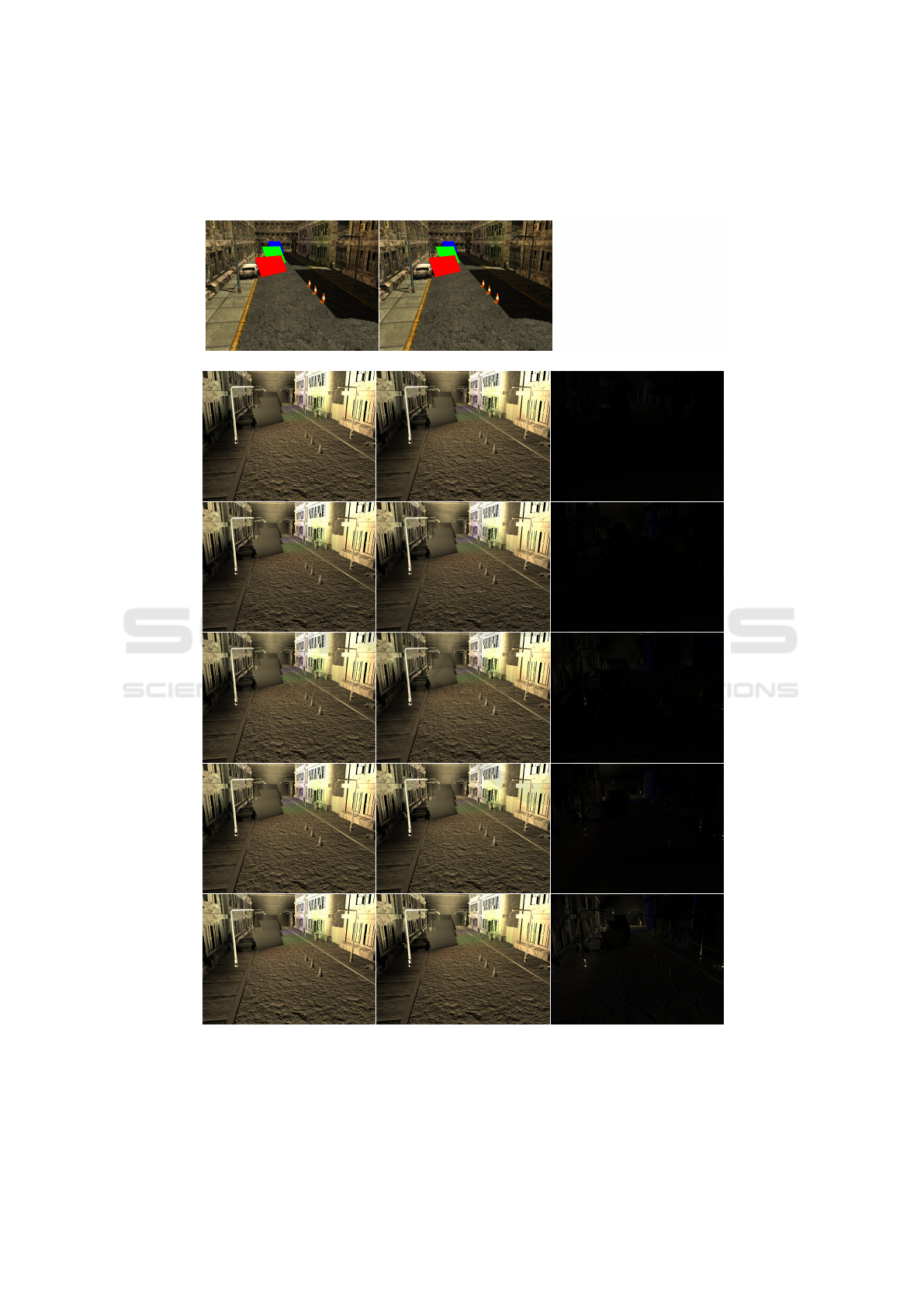
Visual Quality
The visual quality of the results rendered using only
the selected subset of 2048 VALs is almost indistin-
guishable from the original results when comparing
any RSM resolution. This is illustrated by Figure 6
which compares the indirect light buffers computed
using all VALs (left column) and only the selected
VALs (center column). To illustrate the differences
spatially, we computed the absolute difference bet-
ween the two buffers (right column). The top row
shows the scene for which the buffers were compu-
ted. We used a commonly employed urban street
scene and planted some colored planes to illustrate
color bleeding (note that the buildings on the right
are lit by the light reflected off the planes) with ap-
prox. 5500 caches. Despite these images using only
2048 VALs, we also examined the errors for subsets
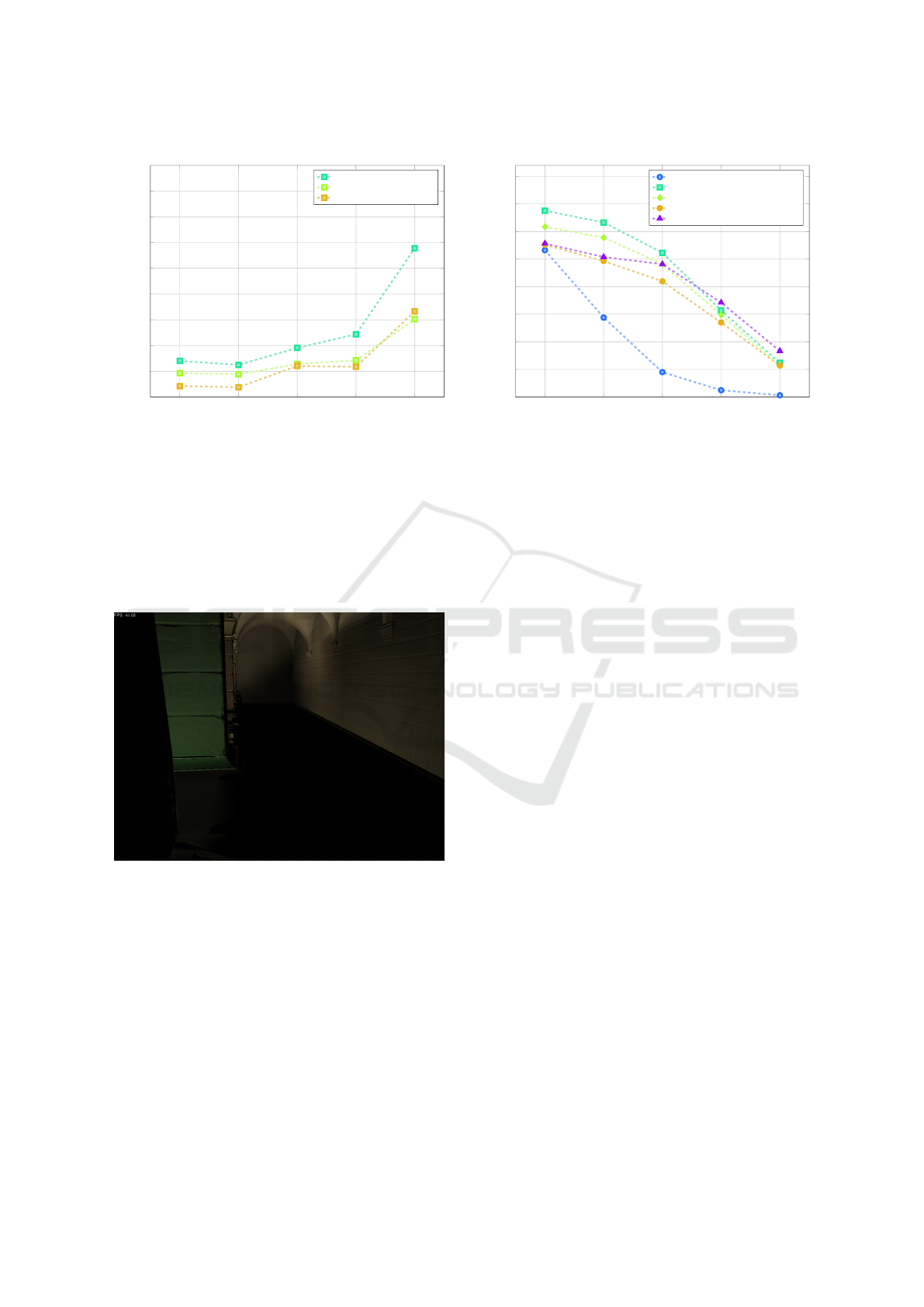
of 4096 and 8192 VALs. The average over the entire
absolute difference image is plotted in Figure 3. We
observe that the average error decreases when more
VALs are selected but it also increases with the RSM
resolution. This is due to a constant number of VALs
being selected while an increasing number is rejected.
However, the difference images demonstrate that this
increasing error is barely noticeable.
Even in other scenes the results of the indirect lig-
hting are comparable to other approaches. In Figure 4,
we demonstrate the output of the indirect lighting in-
side the Sponza scene. It is clearly visible that the
indirect reflection of the green curtain is visible on
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
122
128 x 128 256 x 256 512 x 512 1024 x 1024 2048 x 2048
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
RSM resolution
Average Absolute Difference (Averaged over all Channels)
Average Absolute Difference to Full Accumulation (Standard LightSkin)
(1) LS + BRSM (2048 VALs)
(2) LS + BRSM (4096 VALs)
(3) LS + BRSM (8192 VALs)
Figure 3: Average absolute differences between the results
computed with the standard LightSkin algorithm and the re-
sults computed with our method. The evaluation is perfor-
med for different numbers of selected VALs and the results
are plotted over the increasing RSM resolution.
the stone wall. We have used LightSkin with BRSMs
and a sun light with a RSM resolution of 2048
2
pixels.
8192 VALs are selected to compute the final indirect
lighting.
Figure 4: This figure shows the indirect lighting output
using LS + BRSM with a RSM resolution of 2048
2
pixels
and a subset of 8192 VALs. Using an NVIDIA GeForce
GTX 1080 we achieve more than 40 FPS.
Temporal Coherence
An important aspect to consider with importance sam-
pling is temporal coherence. Small changes inside
the scene change only a few pixels of the RSM and
therefore the importance sampling output. But with
significant changes in scene geometry, light sources,
or camera, we observe some flickering. Especially
for the smaller VAL selection sets and higher reso-
128 x 128 256 x 256 512 x 512 1024 x 1024 2048 x 2048
0
10
20
30
40
50
60
70
80
RSM resolution
Frames per Second (FPS)
Performance Figures of the Compared Algorithms
(1) Standard LightSkin
(2) LS + BRSM (2048 VALs)
(3) LS + BRSM (4096 VALs)
(4) LS + BRSM (8192 VALs)
(5) LS + BRSM (8192 VALs, 256 VS)
Figure 5: Performance figures comparing the standard Lig-
htSkin algorithm to our new approach which uses a reduced
subset of VALs. The performance is measured in terms of
frames per second for several parameterizations of our met-
hod.
lution RSMs, the flickering becomes clearly visible.
However, increasing the subset to 8192 VALs made
the flickering imperceptible, while still performing at
real–time frame rates—even with only 256 view sam-
ples for importance estimation. This way, we achieve
a stable output despite camera, object, or light source
movements.
Performance
The main advantage of our more sophisticated appro-
ach is that it maintains quality as shown earlier while
decreasing computational complexity drastically. Fi-
gure 5 compares performance in terms of frames per
second of LightSkin with our enhanced algorithm.
Even though LightSkin (1) delivers a competitive
number of frames per second for smaller, impractical
RSM resolutions, our method excels for higher reso-
lution shadow maps. For evaluating our method, we
used 512 view samples for importance estimation and
2048 (2), 4096 (3), and 8192 (4) selected VALs. The
number of VALs directly affects performance, howe-
ver, the more limiting factor is the number of view
samples: when using only 256 view samples (5), we
can use 8196 VALs and achieve higher frame rates for
the largest resolution RSMs.
6 LIMITATIONS
The most noticeable limitation compared to the ori-
ginal LightSkin approach is that we do not support
A Realâ
˘
A¸Stime Global Illumination Approach for High Resolution Reflective Shadow Maps in Open World Scenes
123

materials with Sub–surface Scattering (SSS). Sub–
surface Scattering does not affect importance estima-
tion in Equation 10. Therefore, VALs that illuminate
models on their non–camera–facing side are not con-
sidered important. If SSS is to be supported, impor-
tance estimation needs to be adapted and indirect light
accumulation for SSS materials needs to be adapted
as demonstrated and implemented in (Lensing, 2014).
Furthermore, indirect shadows do become less
accurate due to using the standard deviation of the ge-
ometric distribution of the VALs as an estimate for
the indirect light’s area. Since the selected subset
contains less VALs than the original RSM, this stan-
dard deviation becomes less representative. However,
the occlusion itself is based on the caches distributed
on the models. Therefore, the approximation is still
accurate for the selected subset of VALs.
Finally, we still consider temporal coherence an
issue even though we could make it unnoticeable by
increasing the number of selected VALs. In the fu-
ture we plan to explore further methods to achieve
inter–frame stability, for example by employing lazy–
update schemes for the VAL selection, using pseudo-
random seeds, reuse information of the previous
frame, or more sophisticated importance estimation.
This could improve performance further and allow us
to employ this approach for more than just the pri-
mary RSM.
7 CONCLUSION
We presented an approach extending LightSkin.
While preserving its outstanding visual quality it has
proven to be much more efficient. As for the perfor-
mance gain, we achieve approximately 30 fps for a
RSM resolution of 1024 × 1024px where the original
approach delivered only 2.5 fps which results in our
method being roughly 12 times faster than the origi-
nal approach. Furthermore, our method is highly cu-
stomizable to a desired trade–off between quality and
performance by adapting parameters like the num-
ber of view samples, number of selected VALs, the
RSM resolution, and finally, cache distribution den-
sity. Although some limitations exist, our method de-
livers promising results considering real–time global
illumination in open–world scenes with high resolu-
tion RSMs.
In order to further improve this combination, se-
veral paths can be undertaken: For better temporal co-
herence and to reduce the susceptibility to flickering,
methods for improving the selected subset could be
explored. For example, updating only part of the sub-
set could be possible, but this lazy–updating would
introduce some lag to the computation. One possi-
bility would be to use the visible caches’ view buf-
fer position as view samples for importance estima-
tion. In the light of the findings of this work, RSMC
can be considered an additional possibility for impro-
ving temporal stability as the more accurate area ap-
proximation might decrease flickering artifacts. Fu-
ture work should explore the effect on temporal stabi-
lity and mitigations to flickering while observing the
additional complexity introduced to the rendering pi-
peline. Moreover, other approaches for rendering the
indirect lighting should be taken into account.
REFERENCES
Anderson, E. C. (1999). Monte Carlo Methods and Impor-
tance Sampling. Lecture Notes, 1999(October):1–8.
Bar
´
ak, T., Bittner, J., and Havran, V. (2013). Temporally co-
herent adaptive sampling for imperfect shadow maps.
Computer Graphics Forum, 32(4):87–96.
Bunnell, M. (2005). Dynamic Ambient Occlusion and In-
direct Lighting. GPU Gems, 2(2):223–233.
Crassin, C., Neyret, F., Sainz, M., Green, S., and Eise-
mann, E. (2011). Interactive Indirect Illumination
Using Voxel Cone Tracing. Computer Graphics Fo-
rum, 30(7):1921–1930.
Crow, F. C. (1984). Summed-area tables for texture map-
ping. In Proceedings of the 11th annual conference
on Computer graphics and interactive techniques -
SIGGRAPH’84. Association for Computing Machi-
nery (ACM).
Dachsbacher, C. and Stamminger, M. (2005). Reflective
Shadow Maps. In Proceedings of the 2005 symposium
on Interactive 3D graphics and games - SI3D ’05, pa-
ges 203–231. Association for Computing Machinery
(ACM).
Dachsbacher, C. and Stamminger, M. (2006). Splatting in-
direct illumination. In Proceedings of the 2006 sym-
posium on Interactive 3D graphics and games - SI3D
’06. Association for Computing Machinery (ACM).
Green, S. (2005). Implementing improved perlin noise.
GPU Gems, 2:409–416.
Hedman, P., Karras, T., and Lehtinen, J. (2016). Sequen-
tial Monte Carlo instant radiosity. In Proceedings of
the 20th ACM SIGGRAPH Symposium on Interactive
3D Graphics and Games - I3D ’16. Association for
Computing Machinery (ACM).
Hensley, J., Scheuermann, T., Coombe, G., Singh, M., and
Lastra, A. (2005). Fast summed-area table genera-
tion and its applications. Computer Graphics Forum,
24(3):547–555.
Kaplanyan, A. and Dachsbacher, C. (2010). Cascaded light
propagation volumes for real-time indirect illumina-
tion. In Proceedings of the ACM SIGGRAPH Sympo-
sium on Interactive 3D Graphics and Games - I3D 10.
Association for Computing Machinery (ACM).
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
124

Keller, A. (1997). Instant radiosity. In Proceedings of the
24th annual conference on Computer graphics and
interactive techniques - SIGGRAPH ’97. Association
for Computing Machinery (ACM).
K
ˇ
riv
´
anek, J., Gautron, P., Pattanaik, S., and Bouatouch,
K. (2005). Radiance caching for efficient global il-
lumination computation. Visualization and Computer
Graphics, IEEE Transactions on, 11(5):550–561.
Laurent, G., Delalandre, C., Riviere, G. D. L., and Boube-
keur, T. (2016). Forward Light Cuts: A Scalable Ap-
proach to Real-Time Global Illumination. Computer
Graphics Forum, 35(4):79–88.
Lensing, P. (2014). LightSkin: Echtzeitbeleuchtung f
¨
ur Vir-
tual und Augmented Reality. PhD thesis, Ilmenau Uni-
versity of Technology.
Lensing, P. and Broll, W. (2012). Instant indirect illumina-
tion for dynamic mixed reality scenes. In 2012 IEEE
International Symposium on Mixed and Augmented
Reality (ISMAR). Institute of Electrical & Electronics
Engineers (IEEE).
Lensing, P. and Broll, W. (2013a). Efficient shading of indi-
rect illumination applying reflective shadow maps. In
Proceedings of the ACM SIGGRAPH Symposium on
Interactive 3D Graphics and Games - I3D ’13. Asso-
ciation for Computing Machinery (ACM).
Lensing, P. and Broll, W. (2013b). LightSkin: Real-time
Global Illumination for Virtual and Mixed Reality. In
Proceedings of the 5th Joint Virtual Reality Confe-
rence, JVRC ’13, pages 17–24, Aire-la-Ville, Swit-
zerland, Switzerland. Eurographics Association.
Prutkin, R., Kaplanyan, A., and Dachsbacher, C. (2012).
Reflective Shadow Map Clustering for Real-Time
Global Illumination. In Andujar, C. and Puppo, E.,
editors, Eurographics 2012 - Short Papers. The Euro-
graphics Association.
Ritschel, T., Eisemann, E., Ha, I., Kim, J. D. K., and Sei-
del, H.-P. (2011). Making imperfect shadow maps
view-adaptive: High-quality global illumination in
large dynamic scenes. Computer Graphics Forum,
30(8):2258–2269.
Ritschel, T., Grosch, T., Kim, M. H., Seidel, H.-P., Dachs-
bacher, C., and Kautz, J. (2008). Imperfect shadow
maps for efficient computation of indirect illumina-
tion. ACM Transactions on Graphics, 27(5):1.
Ritschel, T., Grosch, T., and Seidel, H.-P. (2009). Approx-
imating dynamic global illumination in image space.
In Proceedings of the 2009 symposium on Interactive
3D graphics and games - I3D ’09. Association for
Computing Machinery (ACM).
Vardis, K., Papaioannou, G., and Gkaravelis, A. (2014).
Real-time radiance caching using chrominance com-
pression. Journal of Computer Graphics Techniques
(JCGT), 3(4):111–131.
Ward, G. J., Rubinstein, F. M., and Clear, R. D. (1988). A
Ray Tracing Solution for Diffuse Interreflection. ACM
SIGGRAPH Computer Graphics, 22(4):85–92.
A Realâ
˘
A¸Stime Global Illumination Approach for High Resolution Reflective Shadow Maps in Open World Scenes
125
APPENDIX
Full accumulation vs. 2048 selected VALs
R
Camera view (all VALs) Camera view (selected VALs) nothing
R
RSM 1024 × 1024px
R
R
Indirect light (all VALs) Indirect light (selected VALs) Difference
R
RSM 128 × 128px
Avg. abs. diff.: 0.007030
RSM 256 × 256px
Avg. abs. diff.: 0.006244
RSM 512 × 512px
Avg. abs. diff.: 0.009551
RSM 1024 × 1024px
Avg. abs. diff.: 0.012184
RSM 2048 × 2048px
Avg. abs. diff.: 0.028902
Figure 6: This figure illustrates the indirect light quality comparing the accumulation of all VALs (left column) to using
only a selected subset of 2048 VALs (center column). The right column illustrates the difference between the two indirect
light buffers. Adjacent to the difference images the average absolute error is listed. This comparison is presented for several
resolutions of the RSM (rows) while he first row of images provides the camera view of the full accumulation vs. using only
2048 VALs. The scene shown in these images holds approx. 5500 caches.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
126
