
An Agent-based Approach to Decentralized Global Optimization
Adapting COHDA to Coordinate Descent
Joerg Bremer and Sebastian Lehnhoff
Department of Computing Science, University of Oldenburg, Uhlhornsweg, Oldenburg, Germany
Keywords:
Global Optimization, Distributed Optimization, Multi-agent Systems, COHDA, Coordinate Descent.
Abstract:
Heuristics like evolution strategies have been successfully applied to optimization problems with rugged,
multi-modal fitness landscapes, to non-linear problems, and to derivative free optimization. Parallelization for
acceleration often involves domain specific knowledge for data domain partition or functional or algorithmic
decomposition. We present an agent-based approach for a fully decentralized global optimization algorithm
without specific decomposition needs. The approach extends the ideas of coordinate descent to a gossiping
like decentralized agent approach with the advantage of escaping local optima by replacing the line search with
a full 1-dimensional optimization and by asynchronously searching different parts of the search space using
agents. We compare the new approach with the established covariance matrix adaption evolution strategy and
demonstrate the competitiveness of the decentralized approach even compared to a centralized algorithm with
full information access. The evaluation is done using a bunch of well-known benchmark functions.
1 INTRODUCTION
Global optimization comprises many problems in
practice as well as in the scientific community. These
problems are often hallmarked by presence of a rug-
ged fitness landscape with many local optima, high
dimensionality and non-linearity. Thus optimization
algorithms are likely to become stuck in local optima
and guaranteeing the exact optimum is often intracta-
ble.
Several approaches have been developed to over-
come this problem by settling for a randomized search
and an at least good solution. Among them are evo-
lutionary strategies, swarm based approaches or Mar-
kov chain Monte Carlo methods. These methods also
cope well with a lack of derivatives in black-box pro-
blems.
In order to accelerate execution, parallel imple-
mentations based on a distribution model on an algo-
rithmic level, iteration level, or solution level can be
harnessed (Talbi, 2009) to parallelize meta-heuristics.
The iteration level model is used to generate and
evaluate different off-spring solutions in parallel, but
does not ease the actual problem. The solution le-
vel parallel model always needs a problem specific
decomposition of the data domain or a functional de-
composition based on expert knowledge.
We present an approach to global, non-linear op-
timization based on an agent-based heuristics using
a cooperative algorithmic level parallel model (Talbi,
2009) for an easy and automated distribution of the
objective. This is achieved by adapting an agent-
based gossipping heuristics (Boyd et al., 2005; Hin-
richs et al., 2014) that acts after the perceive-decide-
act paradigm towards a coordinate descent method
(Wright, 2015). Each agent is responsible for solving
a 1-dimensional sub-problem and thus for searching
one dimension of the high-dimensional problem. By
integrating this local optimization into the decision
process of the decentralized agent approach, global
optimization is achieved by asynchronously genera-
ting local solutions with fixed parameters for other
dimensions like in coordinate descent approaches; but
with the ability to escape local optima and searching
different parts of the search space concurrently. Alt-
hough the used agent protocol has originally been de-
veloped for distributed constraint optimization, we fo-
cus in the following merely on unconstrained optimi-
zation problems.
The rest of the paper is organized as follows. We
start with an overview of related, distributed approa-
ches and give a brief recap of the used decentralized
baseline algorithm COHDA. We describe the adap-
tion to global optimization and evaluate the approach
with several experiments involving standard test ob-
jectives for global optimization.
Bremer J. and Lehnhoff S.
An Agent-based Approach to Decentralized Global Optimization - Adapting COHDA to Coordinate Descent.
DOI: 10.5220/0006116101290136
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 129-136
ISBN: 978-989-758-219-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
129

2 RELATED WORK
Global optimization of non-convex, non-linear pro-
blems has long been subject to research (B
¨
ack et al.,
1997; Horst and Pardalos, 1995). Approaches can
roughly be classified into deterministic and probabi-
listic methods. Deterministic approaches like inter-
val methods (Hansen, 1980) or Lipschitzian methods
(Hansen et al., 1992) often suffer from intractability
of the problem or from getting stuck in local optima
(Simon, 2013). In case of a rugged fitness lands-
cape of multimodal, non-linear functions, probabilis-
tic heuristics are indispensable. Often derivative free
methods for black-box problems are needed, too.
Several evolutionary algorithms have been intro-
duced to solve nonlinear, hard optimization problems
with complex shaped fitness landscapes. Each of
these methods has its own characteristics, strengths
and weaknesses. A common characteristic is the ge-
neration of an offspring solution set by exploring the
characteristics of the objective function in the neig-
hborhood of an existing set of solutions. When the
solution space is hard to explore or objective evalu-
ations are costly, computational effort is a common
drawback for all population-based schemes. Much
effort has already been spent to accelerate conver-
gence of these methods. Example techniques are: im-
proved population initialization (Rahnamayan et al.,
2007), adaptive populations sizes (Ahrari and Shariat-
Panahi, 2015) or exploiting sub-populations (Rigling
and Moore, 1999).
Sometimes a surrogate model is used in case
of computational expensive objective functions
(Loshchilov et al., 2012) to substitute a share of ob-
jective function evaluations with cheap surrogate mo-
del evaluations. The surrogate model represents a le-
arned model of the original objective function.
For faster execution, different approaches for pa-
rallel problem solving haven ben scrutinized in the
past; partly with a need for problem specific adaption
for distribution. Four main questions define the de-
sign decisions for distributing a heuristic: which in-
formation to exchange, when to communicate, who
communicates, and how to integrate received infor-
mation (Nieße, 2015; Talbi, 2009). Examples for
traditional meta-heuristics that are available as distri-
buted version are: Particle swarm (Vanneschi et al.,
2011), ant colony (Colorni et al., 1991), or parallel
tempering (Li et al., 2009). Distribution for gaining
higher solution accuracy is a rather rare use case. An
example is given in (Bremer and Lehnhoff, 2016b).
Another class of algorithms for global optimiza-
tion that has been popular for years by practitioners
rather than scientists (Wright, 2015) are coordinate
descent algorithms (Ortega and Rheinboldt, 1970).
Coordinate descent algorithms iteratively search the
optimum in high dimensional problems by fixing
most of the parameters (components of variable vec-
tor x
x
x) and doing a line search along a single free coor-
dinate axis. Often, all components of x
x
x a cyclically
chosen for approximating the objective with respect
to the (fixed) other components (Wright, 2015). In
each iteration, a lower dimensional or even scalar sub-
problem is solved. The multivariable objective f (x
x
x) is
solved by looking for the minimum in one direction at
a time. There are several approaches for choosing the
step size for the step towards the local minimum, but
as long as the sequence f (x
x
x
0
), f (x
x
x
1
),... , f (x
x
x
n
) is mo-
notonically decreasing the method converges to an at
least local optimum. Like any other gradient based
method this approach gets easily stuck in case of a
non-convex objective function.
We are going to extend the ideas of coordinate
descent towards non-linear optimization by combi-
ning it with ideas for the escape of local optima
and integrating it into the agent-based approach of
combinatorial optimization heuristics for distributed
agents (Hinrichs et al., 2014; Hinrichs et al., 2013b).
This agent-based heuristics works after the perceive-
decide-act paradigm (Picard and Glize, 2006). It col-
lects and aggregates information on intermediate re-
sults of other agents from received information with
possibly different age. Due to acting on informa-
tion of different age the algorithm asynchronously
searches different parts of the search space at the
same time (Hinrichs et al., 2014) after the coopera-
tive algorithmic-level parallel model (Talbi, 2009).
Moreover, instead of using a line search or gradient
step method like in conventional coordinate descent
methods, we use a Brent solver (Brent, 1971) for
the agent’s decision method when deciding on the
1-dimensional sub-problem. In this way, the whole
coordinate axis (at least within the allowed data dom-
ain) is used instead of just doing a 1-dimensional step
downwards. Hence, our approach may also jump in-
side the search space and thus escape local optima
more easily.
3 ALGORITHM
We start the description of our approach with the
underlying baseline algorithm and the negotiation
process between the agents. For global optimiza-
tion we exchange the problem specific part that had
been developed to solve the combinatorial problem
of predictive scheduling in smart grids by agents
being responsible for optimizing a 1-dimensional sub-
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
130

problem.
3.1 COHDA
The combinatorial optimization heuristics for distri-
buted agents (COHDA) was originally introduced in
(Hinrichs et al., 2013b; Hinrichs et al., 2014). Since
then it has been applied to a variety of smart grid ap-
plications (Hinrichs et al., 2013a; Nieße et al., 2014;
Nieße and Sonnenschein, 2013; Bremer and Lehn-
hoff, 2016a). Although this method has been deve-
loped for a specific use case in the smart grid field, it
is in general applicable to arbitrary distributed (com-
binatorial) problems.
With our explanations we follow (Hinrichs et al.,
2014). Originally, COHDA has been designed as a
fully distributed solution to the predictive scheduling
problem (as distributed constraint optimization for-
mulation) in smart grid management (Hinrichs et al.,
2013b). In this scenario, each agent in the multi-agent
system is in charge of controlling exactly one distri-
buted energy resource (generator or controllable con-
sumer) with procuration for negotiating the generated
or consumed energy. All energy resources are drawn
together to a virtual power plant and the controlling
agents form a coalition for decentralized control. It is
the goal of predictive scheduling to find exactly one
schedule for each energy unit such that the difference
between the sum of all schedules and a desired given
target schedule is minimized.
An agent in COHDA does not represent a com-
plete solution as it is the case for instance in
population-based approaches (Poli et al., 2007; Ka-
raboga and Basturk, 2007). Each agent represents a
class within a multiple choice knapsack combinato-
rial problem (Lust and Teghem, 2010). Applied to
predictive scheduling each class refers to the feasible
region in the solution space of the respective energy
unit. Each agent chooses schedules as solution can-
didate only from the set of feasible schedules that be-
longs to the DER controlled by this agent. Each agent
is connected with a rather small subset of other agents
from the multi-agent system and may only communi-
cate with agents from this limited neighborhood. The
neighborhood (communication network) is defined by
a small world graph (Watts and Strogatz, 1998). As
long as this graph is at least simply connected, each
agent collects information from the direct neighbor-
hood and as each received message also contains (not
necessarily up-to-date) information from the transi-
tive neighborhood, each agent may accumulate in-
formation about the choices of other agents and thus
gains his own local belief of the aggregated schedule
that the other agents are going to operate. With this
belief each agent may choose a schedule for the own
controlled energy unit in a way that the coalition is put
forward best while at the same time own constraints
are obeyed and own interests are pursued. In a way,
the choice of an optimal schedule for a single energy
unit can be seen as solving a lower dimensional sub-
problem of the high-dimensional scheduling problem.
All choices of schedules are rooted in incomplete
knowledge and beliefs in what other agents are pro-
bably going to do; gathered from received messages.
The taken choice (result of the decision phase) to-
gether with the decision base (agent’s workspace) is
communicated to all neighbors and in this way know-
ledge is successively spread throughout the coalition
without any central memory. This process is repeated.
Because all spread information about schedule choi-
ces is labeled with an age, each agent may decide ea-
sily whether the own knowledge repository has to be
updated. Any update results in recalculating the own
best schedule contribution and spreading it to the di-
rect neighbors. By and by all agents accumulate com-
plete information and as soon as no agent is capable
of offering a schedule that results in a better solution,
the algorithm converges and terminates.
More formally, each time an agent receives a mes-
sage, three successive steps are conducted. First, du-
ring the perceive phase an agent a
j
updates its own
working memory K
j
with the received working me-
mory K
i
from agent a
i
. From the foreign working me-
mory the objective of the optimization is imported (if
not already known) as well as the configuration that
constitutes the calculation base of neighboring agent
a
i
. An update is conducted if the received configura-
tion is larger or has achieved a better objective value.
Currently, best solutions for sub-problems from other
agents are merged into the own working memory and
temporarily taken as fixed for the following decision
phase that solves the sub-problem for one unit.
In this way, sub-solutions that reflect the so far
best choices of other agents and that are not alre-
ady known in the own working memory are impor-
ted from the received memory. During the decision
phase agent a
j
has to decide on the best choice for his
own schedule based on the updated belief about the
system state γ
k
. Index k indicates the age of the sy-
stem state information. The agent knows which sche-
dules of a subset (or all) of other agents are going to
operate. Based on a set of feasible schedules sampled
from an appropriate simulation model for flexibility
prediction, the schedule putting forward the overall
solution (with regard to the fixed other sub-solutions)
can e. g. be found by line searching the sample.
If the objective value for the configuration with
this new candidate is better, this new solution candi-
An Agent-based Approach to Decentralized Global Optimization - Adapting COHDA to Coordinate Descent
131
perceive:
update knowledge
act:
send workspace
𝑎
2
𝑎
3
𝑎
1
𝑎
5
𝑎
4
Κ
𝑖
Κ
𝑗
integrate
Κ
𝑗
subset of 1-
dimensinal
solutions
decide:
optimize sub-problem
𝑎
𝑗
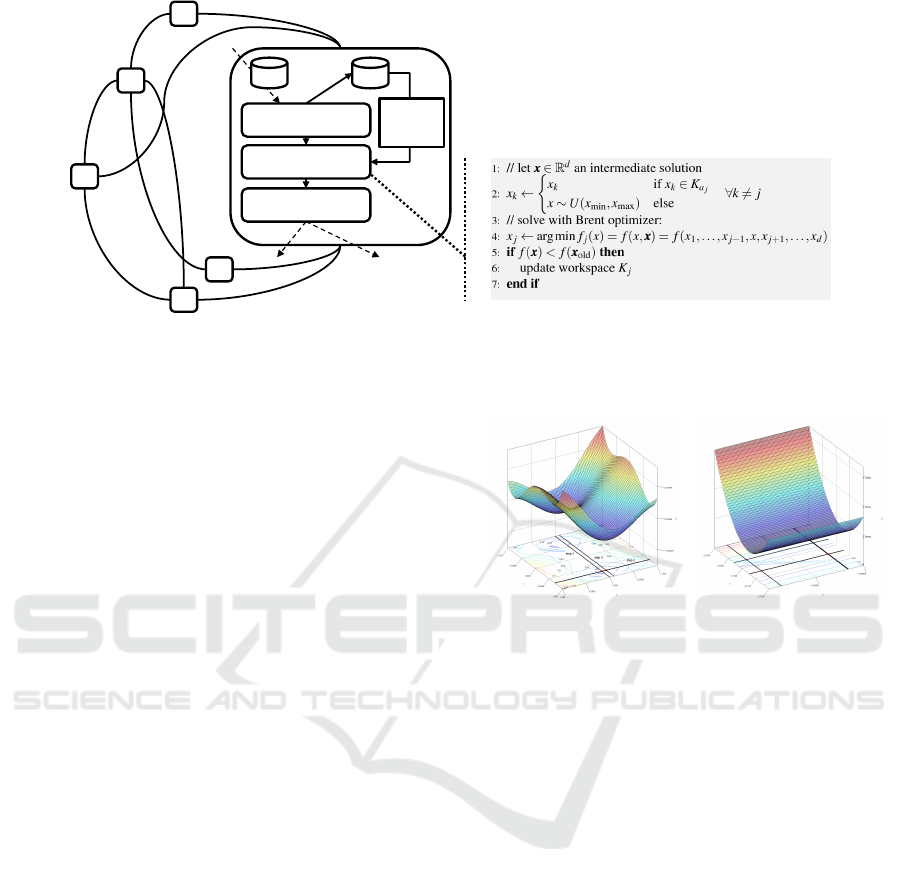
Figure 1: Internal receive-decide-act architecture of an agent with decision process. The agent receives a set of optimum
coordinates from another agent, decides on the best coordinate for the dimensions the agent accounts for and sends the
updated information to all neighbors.
date is kept as selected one. Finally, if a new solution
candidate has been found, the working memory with
this new configuration is sent to all agents in the lo-
cal neighborhood. The procedure terminates, as soon
as all agents reach the same system state and no new
messages are generated. In this case no agent is able
to find a better solution. Finally, all agents know the
same final result.
3.2 COHDAgo
In global optimization we want to find the global
minimum of a real valued objective function. Usu-
ally, decomposition for distributed, parallel solvers
is achieved by either domain decomposition (parallel
processing of different pieces of data) or functional
decomposition (solving smaller problems and aggre-
gating the results). But also a partition on algorithmic
level (independent or cooperative self-contained enti-
ties) is sometimes applied (Talbi, 2009).
We used an agent based approach for the latter de-
composition scheme and implemented a fully decen-
tralized algorithm. Each agent is responsible for one
dimension of the objective function. The intermediate
solutions for other dimensions (represented by decisi-
ons published by other agents) are temporarily fixed.
Thus, each agent only searches along a 1-dimensional
cross-section of the objective and solves a simplified
sub-problem. Nevertheless, for evaluation of the so-
lution, the full objective function is used. In this way,
we achieve an asynchronous coordinate descent with
the ability to escape local minima by parallel sear-
ching different regions of the search space. We denote
our extension to the COHDA protocol for global opti-
mization with COHDAgo. Figure 2 shows the general
scheme of the agent approach for global optimization.
(a) (b)
Figure 2: General optimization scheme along the example
of the Six Hump Camel Back function. On the floor plan,
the successive cross-sections are depicted. In step 1, the
agent responsible for the y-axis optimizes with a fixed x-
value. The found optimum for y (evaluated at point (x,y))
is submitted to the agent for the x-axis who optimizes along
the line from step 2. This process is mutually repeated. Fi-
gure 2(b) shows an enlarged cropping from the later steps
approaching the global optimum (no longer distinguishable
in Fig. 2 after merely 3 steps).
Each agent is responsible for solving one dimension.
Each time an agent receives a message from one of
its neighbors, the own knowledgebase with assumpti-
ons about optimal coordinates x
x
x
∗
of the optimum of
f (with x
x
x
∗
= argmin f (x
x
x)) is updated. Let a
j
be the
agent that just has received a message from agent a
i
.
Then, the workspace K
j
of agent a
j
is merged with
information from the received workspace K
i
. Each
workspace K of an agent contains a set of coordina-
tes x
k
such that x
k
reflects the kth coordinate of the
current solution x
x
x so far found from agent a
k
.
In general, each coordinate x
`
that is not yet
in K
j
is temporarily set to a random value x
`
∼
U(x
min
,x
max
) for objective evaluation. W.l.o.g. all
unknown values could also be set to zero. But, as
many of the standard benchmark objective function
have their optimum at zero, this would result in an
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
132

unfair comparison as such behavior would unintenti-
onally induce some priori knowledge. Thus, we have
chosen to initialize unknown values randomly.
After the update procedure, agent a
j
takes all ele-
ments x
k
∈ x
x
x with k 6= j as temporarily fixed and
starts solving a 1-dimensional sub-problem: x
j
=
argmin f (x,x
x
x); where f is the objective function with
all values except element x
j
fixed. This problem with
only x as the single degree of freedom is solved using
Brent’s method (Brent, 1971). Figure 2 illustrates the
successive approach to the optimum.
Brent’s method originally is a root finding proce-
dure that combines the previously known bisection
method and the secant method with an inverse qua-
dratic interpolation. Whereas the latter are known for
fast convergence, bisection provides more reliability.
By combining these methods – a first step was alre-
ady undertaken by (Dekker, 1969) – convergence can
be guaranteed with at most O(n
2
) iterations (with n
iterations for the bisection method). In case of a well-
behaved function the method converges even superli-
nearly (Brent, 1971). After x
j
has been determined by
Brent’s method, x
j
is communicated (along with all x
`
previously received from agent a
i
) to all neighbors if
f (x
x
x
∗
) with x
j
gains a better result than the previous
solution candidate.
4 RESULTS
We evaluated our agent approach with a set of well-
known test functions developed for benchmarking op-
timization heuristics. We used the following functi-
ons: Six Hump Camel Back, Elliptic, Different Po-
wers, Levy, Ackley, Katsuura, Alpine, Egg Hol-
der, Rastrigin, Weierstrass, Griewank, Zakharov, Sa-
lomon, Quadric, Quartic, and Rosenbrock (Ulmer
et al., 2003; Ahrari and Shariat-Panahi, 2015; Yao
et al., 1999; Li and Wang, 2014; Salomon, 1996;
Mishra, 2006; Suganthan et al., 2005; Liang et al.,
2013). These functions represent a mix of multi-
modal, multi-dimensional functions, partly with a
huge number of local minima and steep as well as
shoal surroundings of the global optimum and broad
variations in characteristics and domain sizes. The
Quartic function also introduces noise (Yao et al.,
1999).
We compared our approach with the well-known
covariance matrix adaption evolution strategy (CMA-
ES) by (Hansen and Ostermeier, 2001). CMA-ES
aims at learning from previous successful evolution
steps for future search directions. A new population
is sampled from a multi variate normal distribution
N (0,C
C
C) with covariance matrix C
C
C which is adapted
0
0.5
1
1.5
2
2.5
·10
4
10
−15
10
−9
10
−3
10
3
10
9
time ticks
log error
d = 5
d = 10
d = 20
(a)
0
0.5
1
1.5
·10
7
10
−15
10
−9
10
−3
10
3
10
9
objective evaluations
log error
d = 5
d = 10
d = 20
(b)
Figure 3: Convergence of an example objective: the Rosen-
brock function with different dimensions. The left figure
shows the convergence’s relation to the number of time tick
for the agent simulation (for this experiment, agents have
been executed at discrete time ticks instead of an otherwise
asynchronous execution in order to measure the relation);
the right one relates the convergence to the number of ob-
jective evaluations.
to maximize the occurrence of improving steps accor-
ding to previously seen distributions for good steps.
Sampling is weighted by a selection of parent soluti-
ons. In a way, the method learns a second order model
of the objective function and exploits it for structure
information and for reducing calls of objective eva-
luations. An a priori parametrization with structure
knowledge of the problem by the user is not neces-
sary as the method is capable of adapting unsupervi-
sed. A good introduction can for example be found
in (Hansen, 2011). Especially for non-linear, non-
convex black-box problems, the approach has shown
excellent performance (Hansen, 2011).
For our experiments, we used default settings for
the CMA-ES after (Hansen, 2011). These settings are
specific to the dimension d of the objective function.
An in-depth discussion of these parameters is also gi-
ven in (Hansen and Ostermeier, 2001). The COHDA
approach is parameter-less and hence there are no pa-
rameters to tune. In general, there are some degrees
of freedom for choosing the structure of the commu-
nication network between the agents. Here, we have
chosen to use the recommended (Watts and Strogatz,
1998) small world topology. For the Brent solver in-
side the decision routine of the agents a bracketing
parameter has to be chosen. As we want to allow sear-
ching the whole data domain in each step, we always
set the bounds to the specific data domain interval for
each objective function respectively.
First, we evaluated the convergence of our agent
approach. Figure 3 shows the results. The CO-
HDA algorithm guarantees by its protocol a sequence
f (x
x
x
0
) < f (x
x
x
1
) < · · · < f (x
x
x
n
) and thus ensures conver-
gence to an at least local optimum (Tseng, 2001; Luo
and Tseng, 1992).
In all cases, the algorithm converges rather fast
as soon as a sufficient number of agents takes part
with a reasonable assumption about optimum loci in
An Agent-based Approach to Decentralized Global Optimization - Adapting COHDA to Coordinate Descent
133
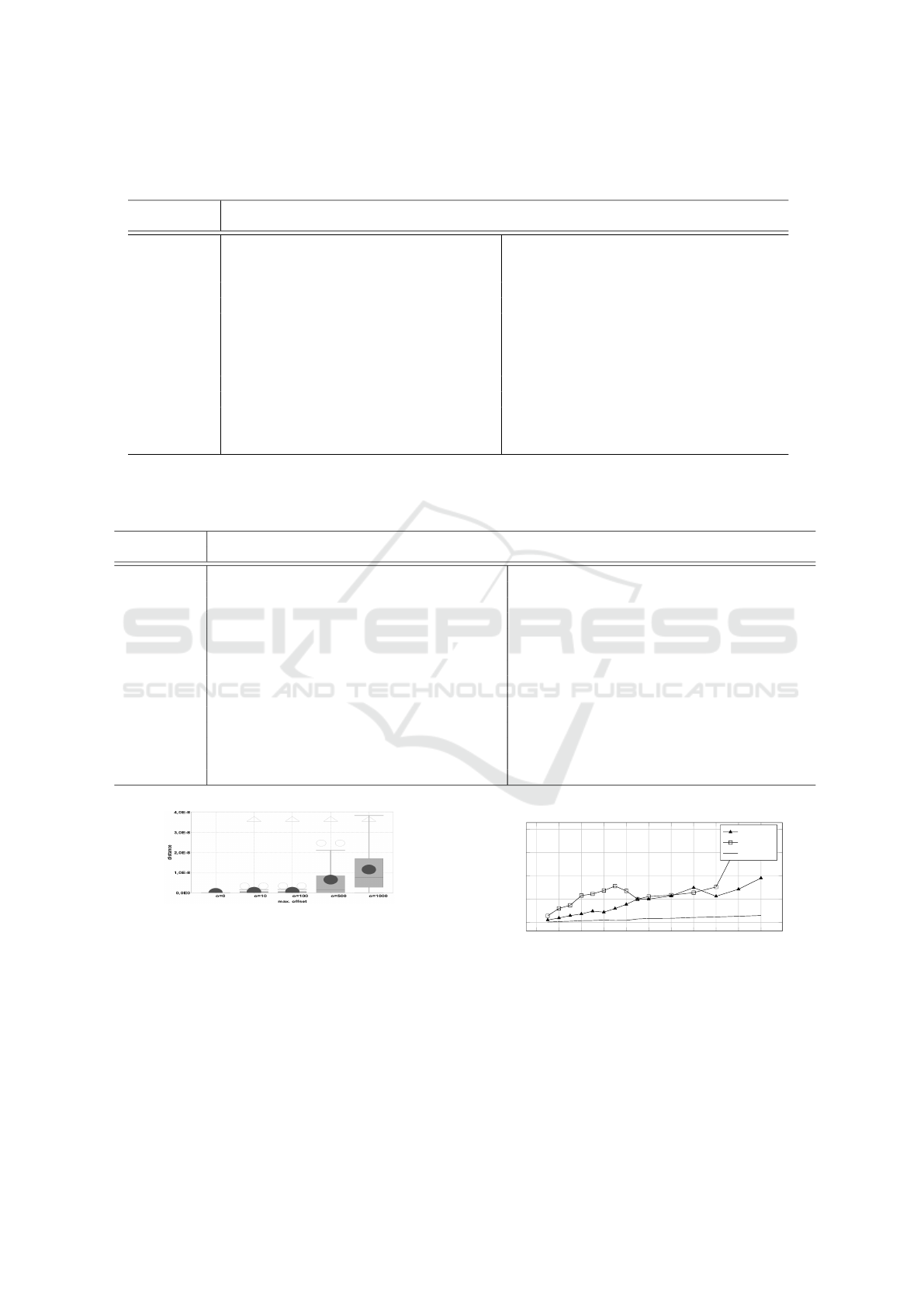
Table 1: Comparison of CMA-ES and COHDAgo for different 50-dimensional objective functions. We compare the number
of objective evaluations and the residual error denoted as the difference between the objective value of the found optimum
and the known global optimum. An error of zero denotes an error below the accuracy of the Java programming language.
function CMA-ES COHDAgo
evaluations error evaluations error
Elliptic 7772.7 ± 4644.7 1.163 × 10
7
± 1.881 × 10
7
6379.5 ± 479.1 0.00 × 10
0
± 0.00 × 10
0
DifferentPowers 29557.0 ± 924.4 2.815 × 10
−12
± 5.432 × 10
−12
6875.6 ± 431.6 0.00 × 10
0
± 0.00 × 10
0
Levy 8178.3 ± 1414.1 3.941 × 10
1
± 1.502 × 10
1
10758.8 ± 1694.0 3.554 × 10
1
± 5.883 × 10
−1
Ackley 3828.5 ± 195.1 2.00 × 10
1
± 6.602 × 10
−13
6991.6 ± 501.7 0.00 × 10
0
± 0.00 × 10
0
Katsuura 25857.6 ± 13699.7 1.407 × 10
2
± 3.083 × 10
2
4087.5 ± 469.5 0.00 × 10
0
± 0.00 × 10
0
Alpine 21497.8 ± 7257.1 2.221 × 10
−3
± 5.639 × 10
−3
5955.6 ± 415.2 0.00 × 10
0
± 0.00 × 10
0
EggHolder 5822.9 ± 793.4 1.194 × 10
4
± 1.054 × 10
3
86329.8 ± 52296.7 9.394 × 10
3
± 6.169 × 10
2
Rastrigin 4292.2 ± 235.6 1.639 × 10
2
± 3.563 × 10
1
6991.0 ± 591.4 0.00 × 10
0
± 0.00 × 10
0
Weierstrass 8135.1 ± 488.6 1.994 × 10
0
± 1.367 × 10
0
1633.6 ± 118.5 0.00 × 10
0
± 0.00 × 10
0
Griewank 6255.4 ± 213.8 2.465 × 10
−3
± 4.148 × 10
−3
15193.0 ± 2903.9 5.601 × 10
−2
± 7.406 × 10
−2
Zakharov 7220.2 ± 300.9 2.261 × 10
−15
± 1.219 × 10
−15
422513.5 ± 20052.7 2.212 × 10
−28
± 1.82 × 10
−28
Salomon 7288.8 ± 1538.3 1.539 × 10
2
± 1.936 × 10
1
29531.5 ± 6191.7 8.039 × 10
−1
± 2.557 × 10
−1
Quadric 7486.1 ± 213.0 2.344 × 10
−15
± 1.336 × 10
−15
711144.1 ± 74108.7 3.839 × 10
−27
± 2.806 × 10
−27
Quartic 2870.0 ± 113.6 2.437 × 10
−17
± 3.464 × 10
−17
5385.2 ± 737.6 0.00 × 10
0
± 0.00 × 10
0
Table 2: Comparison of CMA -ES and COHDAgo for different 200-dimensional objective functions. We compare the number
of objective evaluations and the residual error denoted as the difference between the objective value of the found optimum
and the known global optimum.
function CMA-ES COHDAgo
evaluations error evaluations error
Elliptic 173835.8 ± 1379.5 2.945 × 10
−15
± 7.088 × 10
−16
178917.1 ± 31764.2 0.00 × 10
0
± 0.00 × 10
0
DifferentPowers 2008373.2 ± 58889.4 2.429 × 10
−10
± 7.94 × 10
−11
725581.9 ± 19524.4 0.00 × 10
0
± 0.00 × 10
0
Levy 54696.3 ± 3746.0 2.11 × 10
2
± 1.456 × 10
1
977256.7 ± 66146.3 2.154 × 10
2
± 5.674 × 10
−2
Ackley 28197.0 ± 1977.4 2.00 × 10
1
± 1.397 × 10
−11
704084.8 ± 66484.7 0.00 × 10
0
± 0.00 × 10
0
Katsuura 240121.1 ± 130948.6 6.611 × 10
2
± 1.926 × 10
2
388407.6 ± 43832.3 0.00 × 10
0
± 0.00 × 10
0
Alpine 5000001.0 ± .0 6.406 × 10
−2
± 1.514 × 10
−1
599155.8 ± 62472.5 0.00 × 10
0
± 0.00 × 10
0
EggHolder 107651.2 ± 20221.5 1.186 × 10
5
± 1.651 × 10
3
13261832.7 ± 4022307.4 9.458 × 10
4
± 1.245 × 10
3
Rastrigin
30518.8 ± 1599.3 1.456× 10
3
± 1.758 × 10
2
691825.7 ± 78236.8 0.00 × 10
0
± 0.00 × 10
0
Weierstrass 74532.3 ± 2477.9 5.901 × 10
1
± 1.056 × 10
1
165435.1 ± 7768.5 0.00 × 10
0
± 0.00 × 10
0
Griewank 63831.5 ± 1811.9 2.218 × 10
−13
± 3.13 × 10
−13
933569.6 ± 148528.6 0.00 × 10
0
± 0.00 × 10
0
Zakharov 175889.7 ± 3540.9 2.422 × 10
−15
± 4.317 × 10
−16
49256596.0 ± 23886590.2 5.105 × 10
10
± 1.614 × 10
11
Salomon 231348.8 ± 32512.4 4.829 × 10
2
± 1.92 × 10
1
11727996.8 ± 1010802.6 5.15 × 10
0
± 1.353 × 10
0
Quadric 203135.7 ± 2184.8 6.097 × 10
−14
± 1.23 × 10
−14
53963223.4 ± 63121931.5 8.474 × 10
4
± 8.369 × 10
4
Quartic 27714.4 ± 327.3 3.143 × 10
−17
± 1.223 × 10
−17
487672.8 ± 100830.5 0.00 × 10
0
± 0.00 × 10
0
Figure 4: Comparison of the effect of a position shift using
the 50-dimensional Griewank function. The position of the
optimum is shifted each run by adding a random vector. De-
picted are the mean Euclidean distances of the found posi-
tion and the real (shifted) position of the optimum for diffe-
rent strength of translation and for 200 runs each.
other dimensions instead of using random numbers
for so far missing information. This fact also leaves
room for later improvements distributing better gues-
ses prior to the actual optimization procedure.
Table 1 list some results from a comparison of
0 100 200 300 400
500 600
700 800 900 1,000
0
2
4
6
8
·10
5
dimension
evaluations
Ackley
Alpine
Zakharov
Figure 5: Relationship between number of problem dimen-
sions (and thus number of agents) and number of used ob-
jective evaluations.
COHDAgo and CMA-ES performing on different 50-
dimensional objective functions. In this experiment,
we solved each problem 200 times. The CMA-ES
needs a smaller budget of less objective evaluations
in many cases, but the agent approach produces the
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
134

more accurate results. Table 2 lists the results for a
set of 200-dimensional objective functions. Notwit-
hstanding the larger number of objective evaluations,
the agent COHDAgo approach executes in most cases
faster due to the parallel execution of the agents but
mainly due to the fact that CMA-ES needs longer pro-
cessing time for high-dimensional problems, because
the eigenvalue decompositions of the covariance ma-
trix have to be conducted in O(n
3
), with number of
dimensions n (Knight and Lunacek, 2007).
In order to scrutinize the impact of the position
of the optimum (many benchmark function have it
at x
x
x
∗
= (0, . . . , 0)), we conducted an experiment with
randomly shifted objectives (cf. (Liang et al., 2013;
Suganthan et al., 2005)) f
T
= f +(t
1
,.. . ,t
d
), with t ∼
U(− max
o
,max
o
); max
o
denotes the maximum offset
and depends on the domain of the objective function.
Figure 4 shows the result for the 50-dimensional Grie-
wank function with the domain [−1000,1000]
50
. Five
experiments with different magnitude of random shift
have been conducted. Depicted is the distribution of
the residual Euclidean distance to the real optimum
position. As expected the residual error grows with
magnitude of randomly shifted optimum position but
clearly stays within acceptable bounds with an mean
error (distance to the real optimum) not growing sig-
nificantly larger than 10
−8
. Finally, we scrutinized
the relationship between the number of used objective
evaluations and number of objective dimension and
thus number of agents. Figure 5 shows the result for
three example objective functions.
5 CONCLUSION
We presented a new, decentralized approach for glo-
bal optimization. The agent-based approach extends
ideas from coordinate descent to decentralized gossi-
ping protocols from the agent domain. An agent pro-
tocol for combinatorial problems from the smart grid
domain has been adapted by integrating a Brent sol-
ver into the agent’s decision process. In this way, we
achieved an approach that conducts coordinate des-
cent asynchronously with the ability to escape local
minima by parallel searching different regions of the
search space. In this way, we get improved results
and gain speed by parallel execution, dimension re-
duction, and problem simplification.
At the same time, distribution of the objective can
be achieved easier because merely the parameter vec-
tor is constructed by information gathered from dif-
ferent agents; the objective function stays unchanged.
We achieve an algorithmic level problem distribution
(Talbi, 2009) by automatically decomposing the ob-
jective into a set of 1-dimensional problems but use
the full objective function for evaluation. The com-
petitiveness of the proposed approach has been de-
monstrated compared to the well-established central
approach CMA-ES.
REFERENCES
Ahrari, A. and Shariat-Panahi, M. (2015). An improved
evolution strategy with adaptive population size. Op-
timization, 64(12):2567–2586.
B
¨
ack, T., Fogel, D. B., and Michalewicz, Z., editors (1997).
Handbook of Evolutionary Computation. IOP Publis-
hing Ltd., Bristol, UK, UK, 1st edition.
Boyd, S., Ghosh, A., Prabhakar, B., and Shah, D. (2005).
Gossip algorithms: Design, analysis and applications.
In Proceedings IEEE 24th Annual Joint Conference of
the IEEE Computer and Communications Societies.,
volume 3, pages 1653–1664. IEEE.
Bremer, J. and Lehnhoff, S. (2016a). Decentralized coa-
lition formation in agent-based smart grid applicati-
ons. In Highlights of Practical Applications of Scala-
ble Multi-Agent Systems. The PAAMS Collection, vo-
lume 616 of Communications in Computer and Infor-
mation Science, pages 343–355. Springer.
Bremer, J. and Lehnhoff, S. (2016b). A decentralized PSO
with decoder for scheduling distributed electricity ge-
neration. In Squillero, G. and Burelli, P., editors, Ap-
plications of Evolutionary Computation: 19th Euro-
pean Conference EvoApplications (1), volume 9597
of Lecture Notes in Computer Science, pages 427–
442, Porto, Portugal. Springer.
Brent, R. P. (1971). An algorithm with guaranteed conver-
gence for finding a zero of a function. Comput. J.,
14(4):422–425.
Colorni, A., Dorigo, M., Maniezzo, V., et al. (1991). Distri-
buted optimization by ant colonies. In Proceedings of
the first European conference on artificial life, volume
142, pages 134–142. Paris, France.
Dekker, T. (1969). Finding a zero by means of successive
linear interpolation. Constructive aspects of the fun-
damental theorem of algebra, pages 37–51.
Hansen, E. (1980). Global optimization using interval ana-
lysis – the multi-dimensional case. Numer. Math.,
34(3):247–270.
Hansen, N. (2011). The CMA Evolution Strategy: A Tuto-
rial. Technical report.
Hansen, N. and Ostermeier, A. (2001). Completely derand-
omized self-adaptation in evolution strategies. Evol.
Comput., 9(2):159–195.
Hansen, P., Jaumard, B., and Lu, S.-H. (1992). Global op-
timization of univariate lipschitz functions ii: New al-
gorithms and computational comparison. Math. Pro-
gram., 55(3):273–292.
Hinrichs, C., Bremer, J., and Sonnenschein, M. (2013a).
Distributed Hybrid Constraint Handling in Large
Scale Virtual Power Plants. In IEEE PES Conference
on Innovative Smart Grid Technologies Europe (ISGT
Europe 2013). IEEE Power & Energy Society.
An Agent-based Approach to Decentralized Global Optimization - Adapting COHDA to Coordinate Descent
135

Hinrichs, C., Lehnhoff, S., and Sonnenschein, M. (2014).
A Decentralized Heuristic for Multiple-Choice Com-
binatorial Optimization Problems. In Operations Re-
search Proceedings 2012, pages 297–302. Springer.
Hinrichs, C., Sonnenschein, M., and Lehnhoff, S. (2013b).
Evaluation of a Self-Organizing Heuristic for Interde-
pendent Distributed Search Spaces. In Filipe, J. and
Fred, A. L. N., editors, International Conference on
Agents and Artificial Intelligence (ICAART 2013), vo-
lume Volume 1 – Agents, pages 25–34. SciTePress.
Horst, R. and Pardalos, P. M., editors (1995). Handbook of
Global Optimization. Kluwer Academic Publishers,
Dordrecht, Netherlands.
Karaboga, D. and Basturk, B. (2007). A powerful and ef-
ficient algorithm for numerical function optimization:
artificial bee colony (ABC) algorithm. Journal of Glo-
bal Optimization, 39(3):459–471.
Knight, J. N. and Lunacek, M. (2007). Reducing the space-
time complexity of the CMA-ES. In Genetic and Evo-
lutionary Computation Conference, pages 658–665.
Li, G. and Wang, Q. (2014). A cooperative harmony se-
arch algorithm for function optimization. Mathemati-
cal Problems in Engineering, 2014.
Li, Y., Mascagni, M., and Gorin, A. (2009). A decentrali-
zed parallel implementation for parallel tempering al-
gorithm. Parallel Computing, 35(5):269–283.
Liang, J., Qu, B., Suganthan, P., and Hern
´
andez-D
´
ıaz, A. G.
(2013). Problem definitions and evaluation criteria for
the cec 2013 special session on real-parameter optimi-
zation. Technical Report 201212, Computational In-
telligence Laboratory, Zhengzhou University, Zheng-
zhou, China and Nanyang Technological University,
Singapore, Technical Report.
Loshchilov, I., Schoenauer, M., and Sebag, M. (2012). Self-
adaptive surrogate-assisted covariance matrix adapta-
tion evolution strategy. CoRR, abs/1204.2356.
Luo, Z. Q. and Tseng, P. (1992). On the convergence of
the coordinate descent method for convex differentia-
ble minimization. Journal of Optimization Theory and
Applications, 72(1):7–35.
Lust, T. and Teghem, J. (2010). The multiobjective multi-
dimensional knapsack problem: a survey and a new
approach. CoRR, abs/1007.4063.
Mishra, S. K. (2006). Some new test functions for glo-
bal optimization and performance of repulsive parti-
cle swarm method. Technical Report SSRN 926132,
North-Eastern Hill University, Shillong (India).
Nieße, A. (2015). Verteilte kontinuierliche Einsatzplanung
in Dynamischen Virtuellen Kraftwerken. PhD thesis.
Nieße, A., Beer, S., Bremer, J., Hinrichs, C., L
¨
unsdorf,
O., and Sonnenschein, M. (2014). Conjoint dynamic
aggrgation and scheduling for dynamic virtual power
plants. In Ganzha, M., Maciaszek, L. A., and Papr-
zycki, M., editors, Federated Conference on Compu-
ter Science and Information Systems - FedCSIS 2014,
Warsaw, Poland.
Nieße, A. and Sonnenschein, M. (2013). Using grid related
cluster schedule resemblance for energy rescheduling
- goals and concepts for rescheduling of clusters in
decentralized energy systems. In Donnellan, B., Mar-
tins, J. F., Helfert, M., and Krempels, K.-H., editors,
SMARTGREENS, pages 22–31. SciTePress.
Ortega, J. M. and Rheinboldt, W. C. (1970). Iterative solu-
tion of nonlinear equations in several variables.
Picard, G. and Glize, P. (2006). Model and analysis of
local decision based on cooperative self-organization
for problem solving. Multiagent Grid Syst., 2(3):253–
265.
Poli, R., Kennedy, J., and Blackwell, T. (2007). Particle
swarm optimization. Swarm Intelligence, 1(1):33–57.
Rahnamayan, S., Tizhoosh, H. R., and Salama, M. M.
(2007). A novel population initialization method for
accelerating evolutionary algorithms. Computers &
Mathematics with Applications, 53(10):1605 – 1614.
Rigling, B. D. and Moore, F. W. (1999). Exploitation of
sub-populations in evolution strategies for improved
numerical optimization. Ann Arbor, 1001:48105.
Salomon, R. (1996). Re-evaluating genetic algorithm per-
formance under coordinate rotation of benchmark
functions. a survey of some theoretical and practical
aspects of genetic algorithms. Biosystems, 39(3):263
– 278.
Simon, D. (2013). Evolutionary Optimization Algorithms.
Wiley.
Suganthan, P. N., Hansen, N., Liang, J. J., Deb, K., Chen,
Y. P., Auger, A., and Tiwari, S. (2005). Problem Defi-
nitions and Evaluation Criteria for the CEC 2005 Spe-
cial Session on Real-Parameter Optimization. Techni-
cal report, Nanyang Technological University, Singa-
pore.
Talbi, E. (2009). Metaheuristics: From Design to Imple-
mentation. Wiley Series on Parallel and Distributed
Computing. Wiley.
Tseng, P. (2001). Convergence of a block coordinate
descent method for nondifferentiable minimization.
Journal of Optimization Theory and Applications,
109(3):475–494.
Ulmer, H., Streichert, F., and Zell, A. (2003). Evolu-
tion strategies assisted by gaussian processes with im-
proved pre-selection criterion. In in IEEE Congress
on Evolutionary Computation,CEC 2003, pages 692–
699.
Vanneschi, L., Codecasa, D., and Mauri, G. (2011). A com-
parative study of four parallel and distributed pso met-
hods. New Generation Computing, 29(2):129–161.
Watts, D. and Strogatz, S. (1998). Collective dynamics of
’small-world’ networks. Nature, (393):440–442.
Wright, S. J. (2015). Coordinate descent algorithms. Mat-
hematical Programming, 151(1):3–34.
Yao, X., Liu, Y., and Lin, G. (1999). Evolutionary program-
ming made faster. IEEE Trans. Evolutionary Compu-
tation, 3(2):82–102.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
136
