
Towards an Electronic Orientation Table: Using Features Extracted
From the Image to Register Digital Elevation Model
Léo Nicolle
1
, Julien Bonneton
1
, Hubert Konik
2
, Damien Muselet
2
and Laure Tougne
1
1
Univ. Lyon, Lyon 2, LIRIS, F-69676 Lyon, France
2
Univ. Lyon, UJM-Saint-Etienne, CNRS, LaHC UMR 5516, F-42023, Saint-Etienne, France
Keywords:
Skyline Detection, Digital Elevation Model, Line Matching, Color Edges.
Abstract:
Looking at a countryside, human has no difficulty to identify salient information such as skyline in case
of benign weather. At the same time, during the last decade, smartphones are more and more abundant in
our daily life with always new efficient proposed services but augmented reality systems suffer from a lack of
performance to offer a welladapted tool in this context. Theaim of this paper is then topropose a new approach
coupling image processing and Digital Elevation Model (DEM) exploitation to remedy that shortcoming. The
proposed method first discriminates skyline and non-skyline pixels and then introduces a realtime matching
between previously extracted map and DEM. In order to evaluate objectively each step and our finalized tool,
a new tagged dataset with ground-truth is created and will benefit the entire scientific community.
1 INTRODUCTION
People hiking in the mountains or simply walking are
always looking for information about what they are
seeing : mountain names, elevations, village names,
hiking trails, tourism information, etc. Even if hiking
maps can provide such information, they require the
hiker to match the 2D data he has on the sheet with the
3D landscape he can see and this is not that always
easy for no experts. Orientation tables also help for
such problems but they are located at some too rare
points in the mountains. As nowadays everyone or al-
most has in his pocket a smartphone that integrates in-
struments such as compass, accelerometer, GPS, etc.,
with more and more memory and computing power,
the idea of this work is to create a smartphone ap-
plication that provides as much information as pos-
sible to the people looking at a mountain landscape.
The idea consists in visualizing the landscape with
the smartphone camera and the desired information
will be displayed on the screen thanks to augmented
reality tools. Objectively, some smartphone appli-
cations already provide information about mountains
peaks around a user, but the data are mostly displayed
as maps on the screen (Peakfinder, 2016; pointde-
vue, 2015; swissmap, 2016) or, for few of them, they
are superimposed on the screen image (Peakscanner,
2016; Peak.AR, 2010). Figure 1 shows two examples
of screenshots of such applications.
None of these applications is exploiting the im-
age content in order to help the data registration. In-
deed, the mountains peaks are reconstructed from the
available digital elevation model (DEM.) and from
the smartphone sensors (GPS and digital compasses).
The poor accuracy of such sensors badly impact the
augmented reality results, making these applications
almost unusable. This is in fact the main comments
done by the users on the stores. In recent years, many
approaches have been proposed to compensate the
lack of performance of such sensors, particularly in
constrained environment, but none our way.
Thus, we propose a new approach in order to cope
with this problem. Our solution consists in extracting
a probability map of skyline in the image acquired by
the smartphone camera and then, to match these data
with the 3D data available from the DEM. To avoid
Internet connection problems, it is directly stored in
memory before its utilization.This matching step al-
lows to display the data on the screen with high accu-
racy.
Our contributions are threefold:
• Unlike the classical skyline detection algorithms
that are based on channel-wise edge detector, we
fully exploit the 3D color information of the pixels
by learning a color metric that helps in discrim-
inating skyline edges from non-skyline edges.
28
Nicolle L., Bonneton J., Konik H., Muselet D. and Tougne L.
Towards an Electronic Orientation Table: Using Features Extracted From the Image to Register Digital Elevation Model.
DOI: 10.5220/0006115700280038
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 28-38
ISBN: 978-989-758-227-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Screenshots of two existing applications, namely
"Peakfinder" and "Point de vue", that display local maps on
the screen without registration.
• Because the time response and the accuracy of the
application is crucial, we propose a fast match-
ing between the probability map and the 3D data
available from the DEM.
• Since other applications exist in order to provide
information about peak mountains, we created a
new tagged dataset with ground-truth so that
the accuracy of the different approaches can be
assessed and compared. This dataset as well as
the ground-truth data will be publicly available.
2 RELATED WORKS
There is in the literature few articles dealing with the
extraction of the skyline. The purpose of some of
them is the extraction of this line from the image data
only. However others exploit the smartphone sen-
sors such as GPS and compasses in order to super-
impose the data. But the accuracy of these sensors is
small and do not have very satisfactory results from
the users point of view.
This is the reason why we recommend to exploit
the image data in order to improve the quality of the
registration step. And the main image information
that can be matched with the DEM is the skyline.
Some papers have already proposed approaches in
this direction as we shall see below but in different
contexts and with slightly different constraints.
2.1 Skyline Detection
Lie et al. (Lie et al., 2005) and Kim et al. (Byung-
Ju Kim and Kim, 2011) consider that the skyline is
constituted by the strongest edges in the image. So,
they propose first to extract the edges with the classi-
cal Canny detector. Lie et al. apply a threshold on the
edge image to obtain a binary edge map, which is the
input of a dynamic programming search. The idea is
to connect the candidate edges that respect some cri-
teria whose aim is to preserve local smoothness and
to satisfy geometrical preferences (Lie et al., 2005).
Kim et al. propose to select the best skyline candi-
date among the output of the Canny detector as the
one that is mostly flat and symmetric (Byung-Ju Kim
and Kim, 2011).
Hung et al. also apply the Canny detector as a
first step and then learn a SVM classifier on these
edge pixels to classify them into skyline edges and
no-skyline edges (Hung et al., 2013). For this clas-
sification, they are using a 210-D feature vector for
each edge pixel, that represents color and texture in-
formation extracted from the local neighborhood of
this edge pixel. At test time, they create a map for
each image in which each pixel is characterized by
a value related to its probability not to be a skyline
pixel. Then they propose a recursive algorithm that
finds the shortest path in the image, from left to right,
that minimizes the cumulative energy. This path is the
detected skyline.
Likewise, Ahmad et al. also propose to learn a
classifier on the pixels in order to classify them into
skyline pixels and no-skyline pixels (Ahmad et al.,
2015). The input of the classifier is a 256-D feature
vector characterizing the local neighborhood of the
considered pixel. The difference with (Hung et al.,
2013) is that they are classifying all the pixels, and not
only the edge pixels, because they argue that true sky-
line pixels may be not detected by the Canny edge de-
tector. Then each image is transformed into a classifi-
cation score map which is informing about the proba-
bility of each pixel to be a skyline pixel. Finally, they
also find the shortest path with highest cumulative en-
ergy in this map.
The approach of Saurer et al. is a bit differ-
ent from the previous ones (Saurer et al., 2016) be-
cause they classify all the pixels of the image into sky
and non-sky pixels. The feature vector characteriz-
ing each pixel is a concatenation of 4 bags of words
(textons, local ternary patterns, self-similarities and
SIFT), each one being quantized to 512 clusters and
independently in 5 different color spaces. After run-
ning the classifier on all pixels of the image, they de-
termine the skyline as the line that maximizes along
the columns the number of pixels being classified as
Towards an Electronic Orientation Table: Using Features Extracted From the Image to Register Digital Elevation Model
29

sky above the line and as non-sky below the line, reg-
ularized by a smoothness term that helps the line to
be smooth.
The output of all these works is a binary im-
age in which each pixel is classified as skyline or
non-skyline. In order to improve the accuracy of
the matching between the DEM and our image, we
will show in the experimental results that it is better
to work with a classification score map, where each
pixel is associated with its probability to be a sky-
line pixel, instead of a binary map (skyline vs no-
skyline). Consequently, these approaches would not
help to solve our problem as they are actually pro-
posed. Nevertheless, the classification step of some
of them could have been interesting for our work, but
it is clear that the size of the proposed feature vectors
and their extraction time are not adapted to our prob-
lem. Indeed, we are looking for features that do not
require too much memory place and that are very fast
extracted.
Some other works also propose solutions to match
the detected 2D skyline with 3D data extracted from
the available digital elevation model.
2.2 Matching the Detected Skyline With
3D DEM Data
Baboud et al. propose a solution to automatically an-
notate mountain pictures (Baboud et al., 2011). Their
idea is to detect edges in the mountain pictures and to
match these edges with silhouettes extracted from the
3D DEM. The originality of this work is to introduce
a vector field cross correlation that accurately match 2
sets (from image and from DEM) of local edges. Un-
fortunately, this processing can not be adapted to our
problem since it requires 2 minutes per image. In-
deed, for image annotation problems, the processing
time is not as crucial as for smartphone applications.
So they rather concentrate on accuracy matching and
do not use only the skyline in the image but all the
edges that could help for the matching.
Fedorov et al. exploit the skyline detection algo-
rithm from (Lie et al., 2005) and match this skyline
with 3D DEM data (Fedorov et al., 2014). Their aim
is also to annotate mountain pictures and so they do
not try to improve the processing time. Thus, they ap-
ply a high number of successive steps in order to im-
prove the matching. After extracting the skyline with
(Lie et al., 2005), they apply the vector field cross cor-
relation from (Baboud et al., 2011) in order to find 3D
skyline candidates in the DEM. Then, for each candi-
date they evaluate a Hausdorff distance with the im-
age skyline in order to find the best candidate. Finally,
they resort to a local alignment step by applying again
vector field cross correlations locally at different posi-
tions of the skyline. It is clear that this multiple stage
approach can not reach the processing time constraint
required by our application.
The aim of the work of Saurer et al. is to
geo-localize an image that has been acquired in the
Alps (Saurer et al., 2016). So, from an image, they
first extract the skyline as described below and try to
find the most similar skyline in the DEM data they
have. So their work is more about skyline retrieval
than skyline matching. Hence, they propose an in-
variant and a compact skyline descriptor and, try to
retrieve the image skyline in a dataset of skylines, in
order to deduce coarse GPS position of the consid-
ered image. Consequently, their work can not help
our skyline matching step.
Finally, Zhu et al. propose an image/DEM reg-
istration system based on skyline (Zhu et al., 2013).
This work is interesting because of its real-time con-
straint but unfortunately, it is only adapted to urban
environment and requires the presence of buildings in
the image in order to detect the vanishing point. Con-
sequently, this approach can not be used in our con-
text.
3 FAST AND ACCURATE
SKYLINE EXTRACTION AND
MATCHING WITH DEM
For our electronic orientation table, we propose a two-
steps solution. First, in a similar way as previous
works, we resort to a classification step in order to
extract the skyline from the image. But, unlike all the
other previous approaches, we use very simple color
features that are adapted to our problem thanks to a
metric learning algorithm. Then, we propose to match
the detected skyline with the extracted skyline from
the DEM and project it in the image space.
3.1 Skyline Extraction
In order to fulfill our time constraints, we propose to
use the RGB data available in the image instead of
extracting some complex features. Instead of clas-
sical previous skyline detectors based on edges, we
propose to exploit the simple color difference in or-
der to detect the skyline. Of course the single color
difference is not enough to classify all the edges, but
the robustness of the approach mainly depends on
the variability of the learning data. So, during the
learning step, it is important to consider images under
a lot of different conditions (weather, illumination,
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
30

, etc.). Evaluating accurate color differences from
uncalibrated JPEG images is not an easy task (Per-
rot et al., 2014) but our aim here is rather to eval-
uate discriminative color differences, i.e. color dif-
ferences that help to discriminate skyline edges from
non-skyline edges. For this purpose, we resort to met-
ric learning tools applied in the color RGB space.
3.1.1 Color Metric
Most of the existing works in metric learning are fo-
cused on learning a Mahalanobis-like distance be-
tween 2 vectors C
1
and C
2
in the form:
d
M
(C
1
, C
2
) =
q
(C
1
− C
2
)
T
M(C
1
− C
2
), (1)
where M is a positive semi-definite (PSD) matrix to
optimize (Bellet et al., 2013).
In our case, the vectors are the 3D colors denoted
by C
1
=
R
1
G
1
B
1
T
and C
2
=
R
2
G
2
B
2
T
of the two compared pixels. Let denote dk = k
1
− k
2
,
k ∈ {R, G, B}, the difference between the components
k of the two considered pixels. Thus the matrix M
is a 3x3 symmetric matrix such that each coefficient
m
kk
′
represents the weight associated to each quantity
dk.dk
′
:
M =
m
RR
1
2
m
RG
1
2
m
RB
1
2
m
RG
m
GG
1
2
m
GB
1
2
m
RB
1
2
m
GB
m
BB
. (2)
Indeed, from eq.(1) and eq.(2), we can evaluate
d
2
M
(C
1
, C
2
) as:
d
2
M
(C
1
, C
2
) = m
RR
.dR
2
+ m
RG
.dR.dG+ m
RB
.dR.dB
+ m
GG
.dG
2
+ m
GB
.dG.dB + m
BB
.dB
2
.
(3)
Note that if M is the identity matrix, the distance d
M
is the simple color Euclidean distance. The aim of
metric learning is to learn the matrix M that meets the
problem constraints. In the case of skyline extraction,
we evaluate the distance between each vertical pair of
neighbor pixels and the constraint is that this distance
d
M
(C
1
,C
2
) have to be higher between two pixels on
both sides of the skyline than between two pixels that
are both in the sky or both in the mountain. Thus,
learning M from ground truth data (skyline vs non-
skyline edges) allows us to find which components
are important in the color differences to discriminate
between skyline and non-skyline.
3.1.2 Learning Phase
Practically, in order to learn the 6 coefficients of the
matrix M, we re-formulate the problem as a max-
margin problem and solve it with a linear SVM. In-
deed, d
2
M
(C
1
, C
2
) can be expressed as a dot product:
d
2
M
(C
1
, C
2
) =
dR
2
dR.dG
dR.dB
dG
2
dG.dB
dB
2
T
.
m
RR
m
RG
m
RB
m
GG
m
GB
m
BB
,
d
2
M
(C
1
, C
2
) =dC
T
.H
M
(4)
i.e. as a projection of the pair difference vector dC on
a 6D classifier H
M
.
By looking at mountain landscapes it appears that
the strongest edges, despite the skyline, are mostly in
the mountains and not in the sky. So we propose to
account the edge position when detecting the skyline
so that the top edges in the image have more chance
to be classified as skyline than the bottom edges. This
is done thanks to a weighted step that is detailed in
the next paragraph. Consequently, the main aim of
our learning step is to remove the strong edges in the
sky so that the skyline appears as the first strongest
edge in each column when visiting the pixel from top
to bottom. Thus, we create two sets of edges:
• the positive edges P
+
that are constituted by the
two neighbor colors that lie on both sides of the
skyline,
• the negative edges P
−
that are constituted by two
neighbor colors that lie above the positive edge of
the same column in the same image and whose eu-
clidean distance in the RGB color space is higher
than the one between the positive pair of the same
column. If in one column, no edge fulfills this
condition, we randomly pick a non-skyline edge
above the positive pair of this column, so that the
positive and negative data are well balanced.
From this definition of the learning data, the aim
of our learning step is to learn the Mahalanobis ma-
trix M (or the classifier H
M
) so that, given two
corresponding positive and negative pairs from the
same column and same image P
+
i
and P
−
i
, we have
d
2
M
(P
+
i
) > d
2
M
(P
−
i
). Thus, if the respective pair dif-
ference vectors are denoted dC
i
+
and dC
i
−
, we are
looking for H
M
so that (dC
i
+
)
T
.H
M
> (dC
i
−
)
T
.H
M
.
This can be done by finding the classifier H
M
and the
bias b so that (dC
i
+
)
T
.H
M
+b> 0 and (dC
i
−
)
T
.H
M
+
b < 0. With a classical linear SVM, it corresponds to
maximize the margin between the two sets of pairs.
The bias is just translating all the distances, which are
initially positive, around 0, where skyline scores are
positive and non-skyline scores are negative.
Towards an Electronic Orientation Table: Using Features Extracted From the Image to Register Digital Elevation Model
31

Figure 2: Comparison between the classical Euclidean distance in RGB and our color metric learning approach (see text for
details).
3.1.3 Inference
After the learning step, we get the 6 parameters of
H
M
and use them to obtain the Mahalanobis matrix M
(see eq. (2)). If this matrix is positive semi definite
(PSD), it can be decomposed thanks to the Cholesky
factorization as:
M = L
T
.L, (5)
where L is a 3x3 lower triangular matrix. In this case,
eq.(1) can be expressed as:
d
M
(C
1
, C
2
) =
q
(C
1
− C
2
)
T
L
T
.L(C
1
− C
2
)
=
q
(L.C
1
− L.C
2
)
T
(L.C
1
− L.C
2
),
(6)
which is the Euclidean distance between the two col-
ors L.C
1
and L.C
2
. Thus, from a PSD Mahalanobis
matrix M, we can deduce a matrix L that projects the
RGB colors into a new color space in which the sky-
line edges can be easily detected thanks to a simple
euclidean distance. Consequently, at test step, we just
have to project the RGB color vectors of each pixel
on the new learned discriminate color space thanks
to a simple matrix multiplication L.C
1
and L.C
2
and,
to evaluate a simple Euclidean distance between the
new colors of neighbor pixels in order to detect the
skyline. Hence, for each pixel pair, we get a distance
that is related to the chance of each edge to be on the
skyline. Note that, for all the tests we run, we always
got a matrix M that was PSD. If the matrix M is not
PSD, we have to project it on the PSD cone matrix
in order to get the nearest PSD matrix that fulfills our
learning constraints.
After evaluating the Euclidean distance in the new
learned color space, we get a map of "scores" (chance
to be on the skyline), that we call the score map. Note
that, with the bias of the SVM added, the score s(i, j)
should be positive if the edge at position (i, j) is on
the skyline and negative if it is not on the skyline.
Since during the learning step, we have not consid-
ered strong edges below the skyline on each column
(we have just removed edges in the sky, not in the
mountain), we have to remove these strong edges.
Our simple but efficient solution consists in weight-
ing the scores s(i, j) in the column j as follow:
sw(i, j) =
s(i, j)
1+
∑
i
row=0
s(row, j)(s(row, j) > 0)
, (7)
where the row= 0 is the top row, and (s(row, j) > 0) is
a test that returns 1 if s(row, j) > 0, 1 otherwise. By
this way, we consider that, by visiting each column
from top to bottom, the first strong positive edge has
a high chance to be on the skyline. This is due to our
learning process whose aim was to remove the strong
edges that were above the skyline.
After this step, we get a weighted-score map il-
lustrated in Figure 2. In this figure, we compare the
results obtained by our metric learning approach with
the ones obtained with the classical Euclidean dis-
tance in the RGB color space. We can see that since
the edges along the skyline are not strong in the RGB
space, they are not detected with the Euclidean dis-
tance. Fortunately, the metric we have learned clearly
identifies these edges as strong ones. The images on
the right show the weighted maps obtained from ei-
ther the Euclidean distance map or from the learned
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
32

Figure 3: Two color images from our dataset along with their respective weighted color map and their relief map extracted
from DEM.
color metric. We can see that this step helps in remov-
ing most of strong edges that are below the skyline in
the color metric map.
Nevertheless, it is clear that the information pro-
vided by an image can not be sufficient to get a per-
fect match between the detected pixels and the true
skyline. Consequently, after this fast color detection,
we propose to exploit the available DEM in order to
refine the results. Our aim consists in registering the
DEM with the obtained weighted-score map.
3.2 Skyline Matching
Using the score map previously obtained that indi-
cates the chance for each pixel to be on the skyline,
our goal is now to register correctly the DEM on this
map. Figure 3 shows, for two images, the weighted
score maps as well as the information we have ex-
tracted from the available DEM and projected in the
2D image space from the data provided by the smart-
phone (GPS. and digital compasses) without using the
image features. In these images, the brightness of the
green is related to the altitude of the points. It is worth
mentioning that the DEM we used is free, so its res-
olution is coarse
1
. This figure clearly illustrates the
interest of combining the both data to detect the sky-
line: color edges and DEM.
More precisely, using the GPS coordinatesand the
intrinsic camera parameters, the DEM can be visu-
alized from the camera point of view. The figure 4
shows an example of such a visualization. But as we
can see on this figure, the projection is not perfect due
to smartphone’s measure instruments error. So let ex-
1
http://www.cgiar-csi.org/data/srtm-90m-digital-
elevation-database-v4-1
plain now how we can exploit the previous score map
to obtain a more reliable user’s orientation estimation.
Figure 4: Example of DEM projection, before registration
with the skyline.
Actually, such a problem is a 6-dimensional prob-
lem (considering we know camera’s intrinsic param-
eters) as explained in (Zhu et al., 2013) because the
parameters that have to be adjusted are the position
(three parameters) and the orientation (three parame-
ters too) of the camera. Trusting the GPS position and
considering the projection of the DEM onto a 2D im-
age, we reduce the problem into one that consists in
finding the best 2D transformationto match our score-
map with the DEM projection. This transformation is
composed of one 2D translation and one rotation only.
We do not have to seek for the right scale to apply to
our DEM, this information is contained into camera’s
intrinsic parameters.
In practice, we consider an angle a bit larger that
the real field of view to deal with the lack of precision
of the compass.
Towards an Electronic Orientation Table: Using Features Extracted From the Image to Register Digital Elevation Model
33

Figure 5: From the field of view provided by the smart-
phone, we can reduce the search space.
Let us denote by S
DEM
the skyline extracted from
the projection of the DEM in the image. Notice that
to quickly perform translations and rotations, this sky-
line is stored as a set of 2D vectors, corresponding to
the relative positions of the points in the image, with
respect to the left-most point:
ˆ
S
DEM
= {v
k
| v
k
= S
DEM
(k) − S
DEM
(0)}
where v
k
is the k
th
vector of the vectorized skyline
ˆ
S
DEM
, and S
DEM
(i) is the 2D position of the theoreti-
cal skyline at the column i.
To find the best registration between the DEM
skyline and the weighted-score map sw, we define the
energy function E(
ˆ
S
DEM
, T) as follow:
E(
ˆ
S
DEM
, T) =
n
∑
k=0
sw(v
k
∗ M)
where T is a 3x3 matrix consisting in a translation
and a rotation and sw(p) the value of the weighted
score map at point p. The matrix M satisfying
argmax
T
(E(
ˆ
S
DEM
, T)) is the best transformation to
apply to the DEM skyline to match with weighted-
score map sw (see Fig. 6).
Figure 6: Illustration of the registration between the de-
tected skyline (grey-level image) and the DEM (red curve).
In order to find the best transform matrix T, the
brute force approach would have consist in testing all
the possible T and keeping the one that maximizes the
previous energy function E(
ˆ
S
DEM
, T). The parame-
ters of T are the translation t
x
along the horizontal
axis, the translation t
y
along the vertical axis and the
rotation angle α around the left-most point. We call P
the set of possible solutions defined as:
P = {p = (t
x
,t
y
, α)}
t
x
∈ [t
x
min
; t
x
max
]
t
y
∈ [t
y
min
; t
y
max
]
α ∈ [α
min
; α
max
]
So, we have a 3D search space, and given our dis-
cretization choice, we have card(P) = 3.6 millions of
possible solutions to test.
In order to reduce the complexity of the algorithm,
we resort to an original multi-resolution approach.
The idea consists in:
• testing all the solutions in the search space for few
points of the skyline,
• among these solutions, keeping only the ones that
provide the top values for the energy function (the
other solutions are definitively removed from the
search space),
• adding few points to the skyline and testing the se-
lected solutions of previous step for these points,
• iterating the two previous steps until the full-
resolution skyline is tested.
Practically, we propose an algorithm in log
2
(n)
steps, where n is the number of points in the DEM
(close to image width), i.e. 10 steps for our 1024x768
images. At each step i, we consider only 2
i
points
uniformly picked in the DEM and evaluate the en-
ergy function only for these DEM points. Let de-
note u, a geometric series such that u
0
= card(P) and
u
log
2
(n)
= 1. So, at each step i, we keep only the u
i
best
transforms T that will be tested in the next step. Thus,
at each step, we reduce exponentially the number of
solutions to test while we increase the precision of the
DEM. Our matching algorithm takes 0.5 second for a
1024x768 image on a computer Intel Core i5 1.3GHz.
4 EXPERIMENTAL RESULTS
Since there is no dataset with the information required
by our system (pictures with GPS coordinates and
camera orientations), we created one which will be
publicly available. Below, we will first present this
dataset and the necessary meta data. Then, we will
present the results on this database evaluating in par-
ticular the distance between the skyline in the ground-
truth images and the one extracted from projected
DEM in image without and with registration step.
4.1 Our Dataset
To create the dataset, we developed a smartphone ap-
plication which allows to take a picture of a landscape
and meanwhile to record the geographic position of
the user and the value of the various instruments that
are available in the smartphone. More precisely, the
data stored are the following:
• latitude, longitude, altitude,
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
34
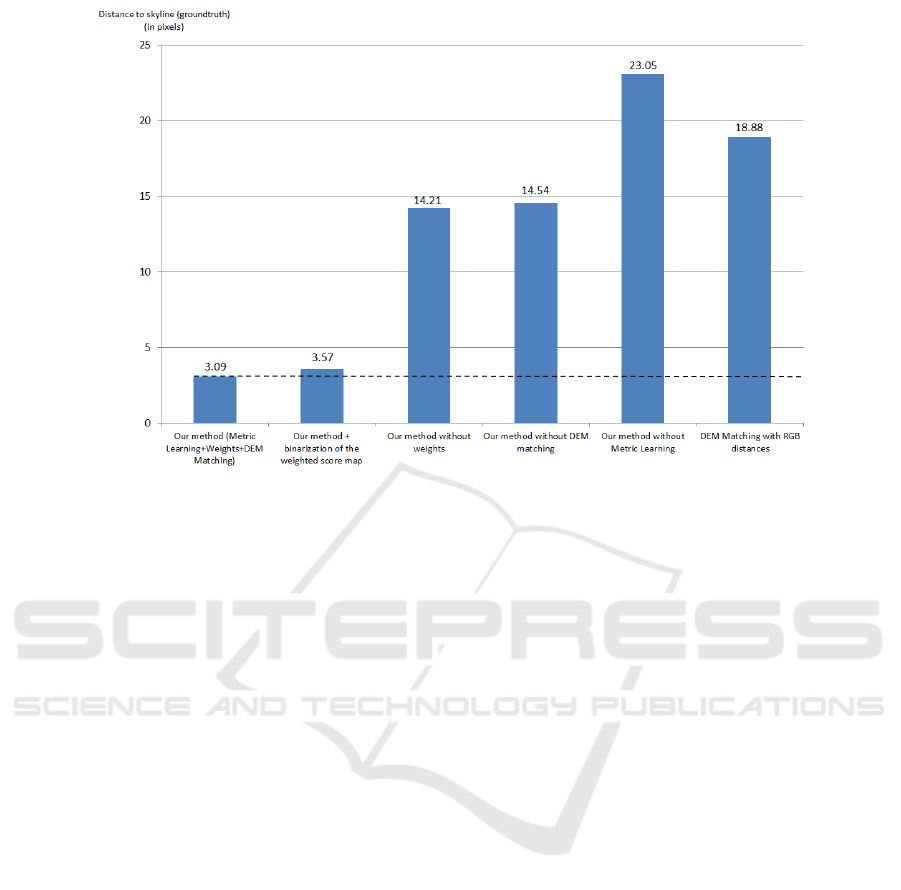
Figure 7: Average distances for the tested methods between detected and ground-truth skylines (lower is better).
• angle with north and magnetic north,
• tilts X, Y and Z.
Some of these parameters are already provided by
some datasets, but the ones concerning the orientation
of the camera are not available. All these elements are
stored in a JSON file.
Furthermore, for each acquired image, we created
a ground truth and so we manually segmented the sky-
line. Hence, JSON file is accompanied by a binary file
in which the pixels of the skyline are marked.
For the tests, about twenty images are taken into
account. We will enrich the dataset over time.
4.2 Results
In order to assess the quality of our algorithm, we pro-
pose to test it on our dataset and to evaluate the aver-
age distance (in pixels) over all the images between
the skyline we obtain and the ground-truth skyline.
Of course this distance is relative to the image size
1024x768. The results are shown in figure 7.
In order to check the relevance of each contribu-
tion of our algorithm, we have run several tests by
removing each single step from the whole process
and check the results for each. We recall that the
main contributions of our algorithm are : color metric
learning, score weighting and matching with DEM.
In figure 7, we clearly see the relevance of each in-
dividual step, since the average distance dramatically
increases (from 3 pixels to 14 or even 23) when we
remove one of them. It is worth mentioning that our
learning step has been run on the CH1 dataset de-
scribed in (Saurer et al., 2016) and not on our dataset.
The CH1 dataset consists of images of mountains in
which the skyline has been manually segmented (un-
fortunately, no geographic information are provided
with this dataset, so that we can not extract the cor-
rect DEM to run our algorithm on these images). This
showsthat our newcolor metric has been learned once
on one dataset and can be used on any other dataset
without fine-tuning it to the new considered images.
Furthermore, in figure 7, we show the results ob-
tained by our algorithm when the score map is bi-
narized before the DEM matching. The binarization
consists in only keeping the highest score in each col-
umn. We can see that this binarization does not help
the matching step (and even slightly increases the dis-
tance). This is interesting to see that our matching al-
gorithm is performing better with a dense score map
(where each pixel is characterized by a score) than
with a binary skyline detection. Finally, we also show
the results provided by a baseline method which con-
sists in evaluating column-wise the RGB distances in
the image and to match the DEM with this score map
(without weights and without ad-hoc color metric).
Figure 7 shows that this approach provides poor re-
sults since the average distance between the detected
and the ground-truth skylines is around 18 pixels.
We can see that by combining all our contribu-
tions, we obtain an average distance equals to 3 pix-
els, which is negligible with respect to the size of the
images (0.4 %) . This shows that the proposed sky-
Towards an Electronic Orientation Table: Using Features Extracted From the Image to Register Digital Elevation Model
35
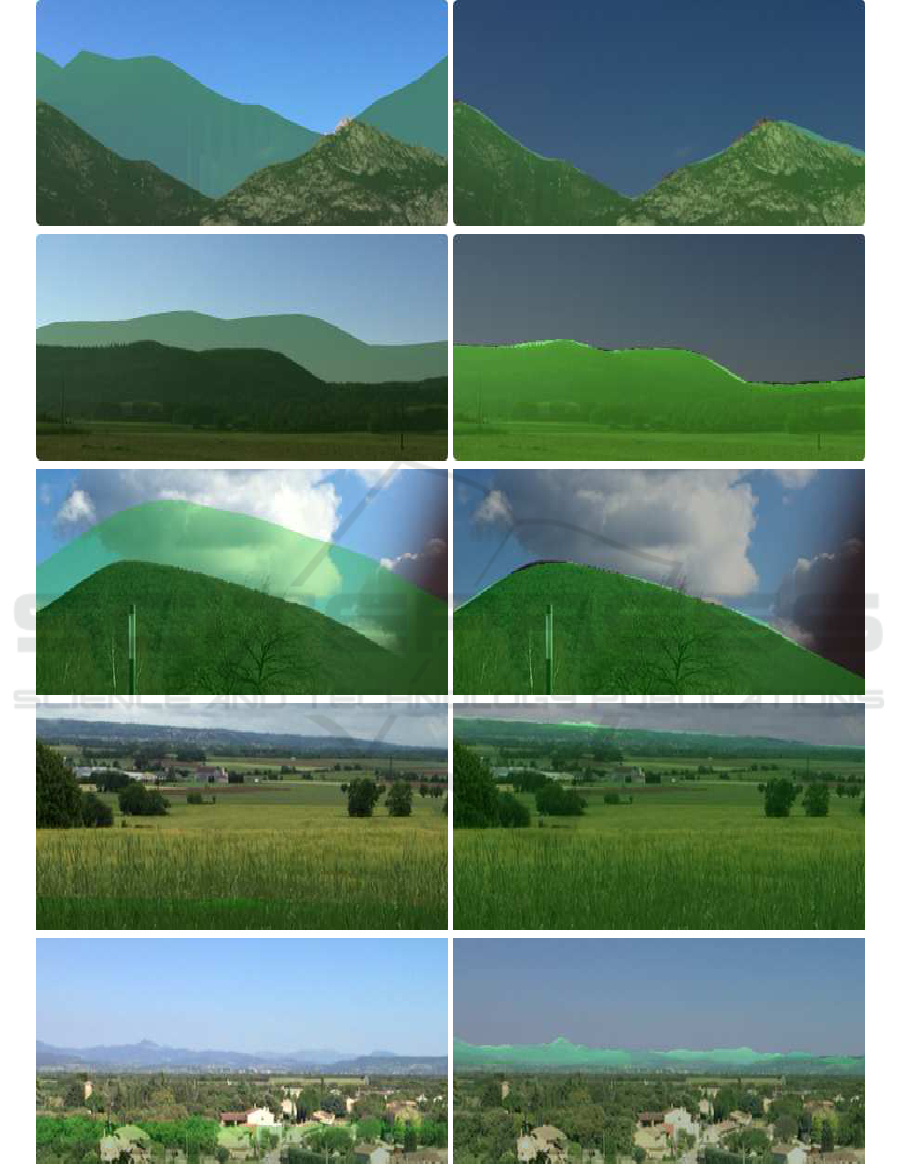
Figure 8: Some results provided by our method. Left : DEM. projection from the smartphone sensors. Right : DEM.
projection after registration with our weigthed score map.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
36

line detection is the perfect candidate to be integrated
in an electronic orientation table.
In figure 8, there are some visual results. We have
zoomed on some examples of mountains to show in
detail the obtained registration. The two original reg-
istrations using only the DEM and the smartphone lo-
calization objectively completely fail but the result is
better by coupling DEM and image processing.
5 CONCLUSION
This paper presented a robust two-steps method able
to create a smartphone application identifying instan-
taneously the skyline in an image. The proposed
method starts by image simplification based on effi-
cient color difference between aligned pixels giving
rise to a score map between sky and non-sky pix-
els. Then, based on available data directly from the
smartphone offering a coarse localization, a second
step matches extracted skylines from the digital ele-
vation model with this map to identify precisely the
real skyline. The interest of this couple between im-
age processing and digital elevation model is twofold:
it gives an efficient tool in this context of electronic
orientation table, and it allows to improve augmented
reality tools based on smartphones using image pro-
cessing techniques. Moreover,the tagged dataset built
in this paper will benefit the entire community in
this field. Future works will first consist in analyz-
ing robustness to meteorologic conditions and then in
detecting other notable elements in the image using
image analysis but also the DEM. Let us remember
that our final goal is to present to the user informa-
tion concerning points of interest in the image using
augmented reality. For this, we also intend to use
databases containing monuments, roads, etc.
There is still an immense potential in this field be-
cause of its utility in many areas like in tourism of
course but also, for example, for hikers who want to
visualize hiking trails, for persons interested in geol-
ogy because it would be possible to show them the
structure of the ground also and so on. Smartphones
are today abundant in our daily life and augmented
reality systems could be developed by mixing their
instruments with image processing algorithms.
ACKNOWLEDGEMENT
The authors acknowledge the support from Le Pro-
gramme Avenir Lyon Saint-Etienne Image et Percep-
tion Embarquées (PALSE IPEm – ANR-11-IDEX-
0007). They also would like to thank Thierry Joliveau
for his help in this work.
REFERENCES
Ahmad, T., Bebis, G., Nicolescu, M., Nefian, A., and Fong,
T. (2015). An edge-less approach to horizon line de-
tection. 2015 IEEE 14th International Conference on
Machine Learning and Applications (ICMLA), pages
1095–1102.
Baboud, L.,
ˇ
Cadík, M., Eisemann, E., and Seidel, H.-P.
(2011). Automatic photo-to-terrain alignment for the
annotation of mountain pictures. In Proceedings of the
2011 IEEE Conference on Computer Vision and Pat-
tern Recognition, Washington, DC, USA. IEEE Com-
puter Society.
Bellet, A., Habrard, A., and Sebban, M. (2013). A survey
on metric learning for feature vectors and structured
data (arxiv:1306.6709v3). In Tech. report.
Byung-Ju Kim, Jong-Jin Shin, H.-J. N. and Kim, J.-S.
(2011). Skyline extraction using a multistage edge fil-
tering. International Journal of Electrical, Computer,
Energetic, Electronic and Communication Engineer-
ing.
Fedorov, R., Fraternali, P., and Tagliasacchi, M. (2014).
Mountain peak identification in visual content based
on coarse digital elevation models. Proceedings of
the 3rd ACM International Workshop on Multimedia
Analysis for Ecological Data, pages 7–11.
Hung, Y.-L., Su, C.-W., Chang, Y.-H., Chang, J.-C., and
Tyan, H.-R. (2013). Skyline localization for mountain
images. In 2013 IEEE International Conference on
Multimedia and Expo (ICME), pages 1–6.
Lie, W.-N., Lin, T. C. I., Lin, T.-C., and Hung, K.-S. (2005).
A robust dynamic programming algorithm to extract
skyline in images for navigation. Pattern Recogn.
Lett., 26(2):221–230.
Peak.AR (2010). http://peakar.salzburgresearch.at/. Ac-
cessed: 2016-09-05.
Peakfinder (2016). https://www.peakfinder.org. Accessed:
2016-09-05.
Peakscanner (2016). http://www.peakscanner.com/. Ac-
cessed: 2016-09-05.
Perrot, M., Habrard, A., Muselet, D., and Sebban, M.
(2014). Modeling perceptual color differences by lo-
cal metric learning. In European Conference on Com-
puter Vision (ECCV), pages 96–111. Springer Interna-
tional Publishing.
pointdevue (2015). https://itunes.apple.com/fr/app/
point-de-vue/id341554913?mt=8. Accessed: 2016-
09-08.
Saurer, O., Baatz, G., Köser, K., Ladický, L., and Pollefeys,
M. (2016). Image based geo-localization in the alps.
Int. J. Comput. Vision, 116(3):213–225.
swissmap (2016). https://itunes.apple.com/fr/app/
swiss-map-mobile/id311447284?mt=8. Accessed:
2016-09-08.
Towards an Electronic Orientation Table: Using Features Extracted From the Image to Register Digital Elevation Model
37

Zhu, S., Morin, L., Pressigout, M., Moreau, G., and
Servières, M. (2013). Video/gis registration system
based on skyline matching method. In 2013 IEEE
International Conference on Image Processing, pages
3632–3636.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
38
