
Variable Neighbourhood Search Solving Sub-problems of a Lagrangian
Flexible Scheduling Problem
Alexander H
¨
ammerle
1
and Georg Weichhart
1,2
1
Profactor GmbH, 4407 Steyr-Gleink, Austria
2
Dep. of Business Informatics - Communications Engineering, Johannes Kepler University, 4040 Linz, Austria
Keywords:
Flexible Job Shop Scheduling, Lagrangian Relaxation, Subgradient Search, Variable Neighbourhood Search.
Abstract:
New technologies allow the production of goods to be geographically distributed across multiple job shops.
When optimising schedules of production jobs in such networks, transportation times between job shops and
machines can not be neglected but must be taken into account. We have researched a mathematical formula-
tion and implementation for flexible job shop scheduling problems, minimising total weighted tardiness, and
considering transportation times between machines. Based on a time-indexed problem formulation, we apply
Lagrangian relaxation, and the scheduling problem is decomposed into independent job-level sub-problems.
This results in multiple single job problems to be solved. For this problem, we describe a variable neigh-
bourhood search algorithm, efficiently solving a single flexible job (sub-)problem with many timeslots. The
Lagrangian dual problem is solved with a surrogate subgradient search method aggregating the partial solu-
tions. The performance of surrogate subgradient search with VNS is compared with a combination of dy-
namic programming solving sub-problems, and a standard subgradient search for the overall problem. The
algorithms are benchmarked with published problem instances for flexible job shop scheduling. Based on
these instances we present novel problem instances for flexible job shop scheduling with transportation times
between machines, and lower and upper bounds on total weighted tardiness are calculated for these instances.
1 INTRODUCTION
Manufacturing processes are executed across geo-
graphically distributed job shops. Despite this dis-
tribution, a globally optimised production schedule
is desirable to stay competitive. For implementation
of an optimisation algorithm for distributed produc-
tion networks, we have formulated a flexible job shop
problem with transport times to account for the distri-
bution. The jobs have to be scheduled across multi-
ple machines in the production network. Each job is
consisting of a defined sequence of operations. The
machines assigned to a specific job may be in dif-
ferent shops, requiring transport of the workpiece(s).
We regard flexible scheduling problems, i.e. an oper-
ation can be processed on alternative machines, where
each operation takes a different timespan to be com-
pleted. We do not consider transport resources with
limited capacities, hence we are not confronted with
the additional problem of routing transport resources.
Due dates for jobs are specified, and we consider total
weighted tardiness as overall objective function.
As the distribution of the production system is one
of the distinguishing features of our approach, distri-
bution as a general principle, guided the development
of our algorithm solving the outlined problem. The
scheduling problem has been divided into multiple
sub-problems that can be solved in a distributed man-
ner. In a physical modelling approach, a sub-problem
corresponds to a physical entity, e.g. a machine, a job
or a job shop. With a proper decomposition into sub-
problems, a distributed scheduling algorithm allows
dynamic scheduling with localised disturbance han-
dling, confined to a small set of sub-problems, and
performance improvements through concurrent com-
puting.
We modelled the problem decomposition based on a
sound mathematical foundation, and the distributed
scheduling algorithm provides not only high-quality
upper bounds on total weighted tardiness, but also
guaranteed lower bounds.
Lagrangian relaxation is a method satisfying these
requirements, with a substantial scientific track record
for job shop scheduling problems. Relevant work
can be found in (Hoitomt et al., 1993), (Wang et al.,
1997), (Chen and Luh, 2003), (Baptiste et al., 2008),
234
HÃd’mmerle A. and Weichhart G.
Variable Neighbourhood Search Solving Sub-problems of a Lagrangian Flexible Scheduling Problem.
DOI: 10.5220/0006114102340241
In Proceedings of the 6th International Conference on Operations Research and Enterprise Systems (ICORES 2017), pages 234-241
ISBN: 978-989-758-218-9
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
(Buil et al., 2012), (Chen et al., 1998) and (Kaskavelis
and Caramanis, 1998). An analysis of the rele-
vant work shows that predominantly machine capac-
ity constraints are relaxed, based on a time-indexed
mathematical formulation. The resulting job-level
sub-problems (single job-shop scheduling problems)
are not N P -hard and they are solved with dynamic
programming, with its complexity depending on the
required number of timeslots for the scheduling prob-
lem instance. The dual problem. through which the
sub-problem solutions are brought together, is solved
with variants of subgradient search. The effect that
the single job-shop scheduling problems are solved
concurrently is, that the generated solution is (likely)
infeasible, with multiple job-operations scheduled on
a single machine. The favourite method for feasibility
repair is list scheduling.
Our work relies on the mainstream results of the
relevant work. In our approach we relax machine ca-
pacity constraints, we use subgradient search to solve
the dual problem and we use list scheduling for feasi-
bility repair.
However, when it comes to solving sub-problems,
dynamic programming is not efficient enough for
problem instances with many timeslots. Such prob-
lem instances can easily occur if we regard manu-
facturing networks with long transportation times be-
tween shops, respectively machines. We therefore
implemented a new heuristic for solving the sub-
problems in more time-efficient manner. For solving
the dual problem, we apply a surrogate subgradient
search, which allows the sub-problems to be solved
approximately. Thus we define our main research
contribution:
• Specification of novel problem instances for flex-
ible job shop scheduling with transportation times
between machines (FJSSTT), based on published
instances for flexible job shop scheduling. These
instances are used for benchmarking our algo-
rithms.
• A Variable Neighbourhood Search (VNS) algo-
rithm, efficiently solving job-level sub-problems
with many timeslots.
• Calculation of lower and upper bounds on to-
tal weighted tardiness for the novel FJSSTT in-
stances.
The remainder of the paper is structured as follows.
In section 2 we discuss the benchmark problem in-
stances and their extension with transportation times.
The mathematical model including problem formula-
tion and Lagrangian relaxation is described in section
3. Problem solving algorithms are discussed in sec-
tion 4, and computational results are provided in sec-
tion 5. Finally we present our conclusions in section
6.
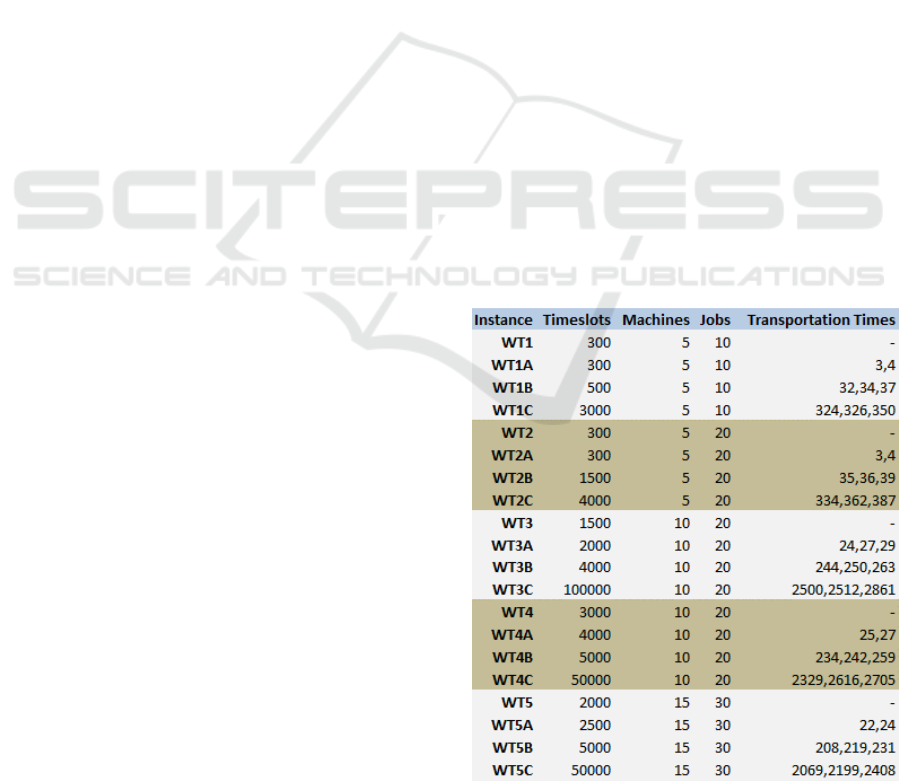
2 FJSSTT PROBLEM INSTANCES
As benchmark instances for flexible job shop schedul-
ing we use the problem instances WT1-WT5, pub-
lished in (Brandimarte, 1993). Based on these in-
stances, we generated novel FJSSTT problem in-
stances in the following way: (1) For each WT in-
stance the machines are randomly grouped into three
job shops. (2) Short/moderate/long transportation
times between the job shops were calculated. A lower
bound on the makespan for the respective problem in-
stance serves as reference time R. The transportation
times are then randomly generated from the following
intervals.
• Short transportation times (network type A):
(0.09 R, 0.11 R)
• Moderate transportation times (network type B):
(0.9 R, 1.1 R)
• Long transportation times (network type C):
(9 R, 11 R)
The transportation times between the job shops sat-
isfy the triangle inequality. Within a shop the trans-
portation times are 0. Figure 1 provides an overview
of the original instances WT1-WT5 and the generated
FJSSTT instances.
Figure 1: Problem instances.
Variable Neighbourhood Search Solving Sub-problems of a Lagrangian Flexible Scheduling Problem
235

3 MATHEMATICAL MODEL
In this section we describe a mathematical model
for the FJSSTT problem with minimisation of total
weighted tardiness as objective. Lagrangian relax-
ation is applied to the machine capacity constraints,
and the resulting Lagrangian problem is decomposed
into independent job-level sub-problems.
3.1 Problem Formulation
Our problem formulation is based on (Wang et al.,
1997). I jobs with individual due dates have to be
scheduled on M available machines. We assume
immediate availability of jobs. The set of jobs I
is {0, 1, ..., I − 1} and the set of machines M is
{0, 1, ..., M − 1}. Job i consists of J
i
non-preemptive
operations, with J
i
= {0, 1, ..., J
i
− 1} denoting the
set of operations for job i. The operation j of job
i is denoted as (i, j). We regard simple, chain-like
precedence constraints amongst operations belong-
ing to the same job. The set of alternative machines
for operation (i, j) is denoted as H
i j
, with machine-
specific processing times. The scheduling horizon
consists of K discrete timeslots, the set of timeslots
K is {0, 1, ..., K − 1}. The beginning time of an oper-
ation is defined as the beginning of the corresponding
timeslot, and the completion time as the end of the
timeslot.
In the following we introduce further parame-
ters and decision variables used in the mathematical
model. Parameters are given with a specific problem
instance as input data, whereas the decision variables
span the solution space for the scheduling problem.
Parameters
D
i
, i ∈ I : Job due dates.
P
i jm
, i ∈ I , j ∈ J
i
, m ∈ H
i j
: Processing time of oper-
ation (i, j) on machine m.
R
mn
, m ∈ M , n ∈ M : Transportation time from ma-
chine m to machine n.
W
i
, i ∈ I : Job tardiness weight.
Variables
δ
i jmk
, i ∈ I , j ∈ J
i
, m ∈ M , k ∈ K : The binary vari-
able δ
i jmk
is 1, if operation (i, j) is processed on
machine m at timeslot k, and 0 otherwise.
b
i j
, i ∈ I , j ∈ J
i
: Beginning time of operation (i, j).
c
i j
, i ∈ I , j ∈ J
i
: Completion time of operation (i, j).
m
i j
∈ H
i j
, i ∈ I , j ∈ J
i
: The machine assigned to op-
eration (i, j).
λ
mk
, m ∈ M , k ∈ K : Lagrange multiplier for timeslot
k on machine m.
The decision variables δ
i jmk
, b
i j
and c
i j
are not inde-
pendent, the following relation holds:
δ
i jmk
=
(
1 if b
i j
≤ k ≤ c
i j
0 otherwise.
(1)
The optimisation objective is the minimisation of the
weighted sum of job tardiness, the optimisation prob-
lem is then
Z = min
b
i j
,m
i j
∑
i∈I
W
i
T
i
, (2)
with
T
i
= max(0,C
i
− D
i
), (3)
where C
i
is the completion time for job i, i.e. C
i
=
c
i,J
i
−1
.
Constraints Equation (2) has to be solved subject
to a number of constraints. The machine capacity
constraints are expressed as
∑
i∈I
∑
j∈J
i
δ
i jmk
≤ 1, ∀m ∈ M , ∀k ∈ K . (4)
Equation (4) states that at each timeslot a machine
cannot process more than one operation. Processing
time constraints define the relation between beginning
time and completion time of operations:
c
i j
= b
i j
+ P
i jm
i j
− 1, ∀i ∈ I , ∀ j ∈ J
i
. (5)
The precedence constraints between job operations
are
b
i j
≥ c
i, j−1
+ 1 + R
m
i, j−1
m
i j
, ∀i ∈ I , ∀ j ∈ J
i
. (6)
The term “1” in (5) and (6) occurs due to the def-
inition of operation beginning time and completion
time, respectively. The precedence constraints con-
sider transportation times R
mn
between machines. For
operations (i, j − 1) and (i, j) equation (6) states that
the beginning time of (i, j) cannot be earlier than the
arrival time at machine m
i j
. We assume immediate
availability of transport resources to move workpieces
corresponding to jobs between machines. The trans-
portation time between machines located in different
job shops covers transport between the shops as well
as shop-internal logistics activities.
The occurrence of the term R
m
i, j−1
m
i j
in (6) renders
the constraint non-linear. This non-linearity can eas-
ily be resolved, in fact the mathematical model can
be formulated as a linear integer program, which is
outside the scope of this paper.
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
236

3.2 Lagrangian Relaxation
For the FJSSTT problem there are two candidate
constraint sets for relaxation: precedence constraints
and machine capacity constraints. The relaxation of
precedence constraints and decomposition into inde-
pendent machine-level sub-problems is hampered by
the structure of the precedence constraints (6), as
the term R
m
i, j−1
m
i j
couples the precedence constraints
across machines. Lagrangian relaxation of machine
capacity constraints results in the relaxed problem
Z
D
(λ) = min
b
i j
,m
i j
∑
i∈I
W
i
T
i
+
∑
m∈M
∑
k∈K
λ
mk
"
∑
i∈I
∑
j∈J
i
δ
i jmk
− 1
#
, (7)
where λ is the vector of Lagrange multipliers. (7) has
to be solved subject to constraints (5) and (6). For a
given pair of indices m, k the term in brackets is pos-
itive if the capacity constraint for timeslot k on ma-
chine m is violated. Z
D
(λ) can be reformulated as
Z
D
(λ) = min
b
i j
,m
i j
∑
i∈I
W
i
T
i
+
∑
i∈I
∑
j∈J
i
c
i j
∑
k=b
i j
λ
m
i j
k
−
∑
m∈M
∑
k∈K
λ
mk
. (8)
The structure of Z
D
(λ) allows the decomposition into
independent job-level sub-problems
S
i
= min
b
i j
,m
i j
W
i
T
i
+
∑
j∈J
i
c
i j
∑
k=b
i j
λ
m
i j
k
. (9)
S
i
is a one job scheduling problem and can be charac-
terised as follows, cf. (Chen et al., 1998). A job re-
quires the completion of a set of operations, and each
operation can be performed on one of several alter-
native machines. The job operations must satisfy a
set of chain-like precedence constraints (6), consider-
ing transportation times between machines. Further-
more processing time constraints (5) have to be satis-
fied. Each machine has a marginal cost for utilisation
at each timeslot within the scheduling horizon under
consideration. The scheduling problem is to deter-
mine the machine and the completion time of each
operation of the job to minimise the sum of job tardi-
ness and the total cost of using the machines to com-
plete the job, where the cost of using machine m at
time k is given as λ
mk
.
With the introduction of sub-problems S
i
, the re-
laxed problem can be reformulated,
Z
D
(λ) =
∑
i∈I
S
i
−
∑
m,k
λ
mk
. (10)
The Lagrangian dual problem, optimising the La-
grange multiplier values, is
Z
D
= max
λ
Z
D
(λ). (11)
It can be shown that Z
D
(λ) is concave and piece-wise
linear, thus hill-climbing methods like sub-gradient
search can be applied to solve the dual problem. The
one job scheduling problem is not N P -hard, and it
can be exactly solved with dynamic programming,
with complexity O
K
∑
j
H
i j
. However, we will
see in section 5 that the efficiency of dynamic pro-
gramming is not good enough to cope with FJSSTT
instances with many timeslots. Thus a fast heuristic
has to be developed to solve the one job scheduling
problems. In the following section we will describe
such a heuristic approach.
4 PROBLEM SOLVING
In this section we first describe the formulation of
the dual problem, which is followed by the sub-
problem solving heuristic Variable Neighbourhood
Search (VNS).
4.1 Dual Problem
In order to solve the Lagrangian dual problem (11)
we apply two variants of the subgradient search (SG):
standard SG, and surrogate SG. The standard SG
method requires the dual problem (and thus the sub-
problems (9)) to be fully optimised, otherwise proper
subgradient directions can not be calculated. With the
dual problem fully optimised, the dual cost Z
D
are a
lower bound on total weighted tardiness. In the surro-
gate SG method it is sufficient to solve the dual prob-
lem approximately, and thus we can apply VNS to
solve the sub-problems.
In an SG iteration l the Lagrange multipliers are
adjusted for the next iteration according to
λ
l+1
mk
= λ
l
mk
+ s
l
γ
l
mk
, (12)
with a positive, scalar step-size s
l
and γ
l
mk
, an element
of the subgradient vector γ
l
,
γ
l
mk
=
∑
i∈I
∑
j∈J
i
δ
∗
i jmk
− 1. (13)
δ
∗
i jmk
denotes the optimal value for δ
i jmk
in iteration l,
resulting from solving Z
D
(λ) with Lagrange multipli-
ers λ
l
. The element γ
l
mk
can be interpreted as violation
Variable Neighbourhood Search Solving Sub-problems of a Lagrangian Flexible Scheduling Problem
237

of the machine capacity constraint for machine m and
timeslot k in SG iteration l.
In the standard SG method we use a common for-
mula for the calculation of step-sizes:
s
l
= α
l
Z
∗
− Z
D
(λ
l
)
k
γ
l
k
2
, (14)
with a scalar α
l
, 0 < α
l
< 2. Z
∗
is an upper bound
on Z
D
and is updated if feasibility repair improves
the upper bound. The search is initialised with a pa-
rameter α
0
, and α
l
is halved after Γ iterations if no
improvement in Z
D
has been achieved.
The step-sizes for the surrogate SG method are
calculated according to (Bragin et al., 2014):
s
l
= β
l
s
l−1
˜
γ
l−1
k
˜
γ
l
k
, (15)
with the surrogate subgradient vector
˜
γ
l
. The param-
eter β
l
is adjusted according to
β
l
= 1 −
1
Ω · l
ρ
, ρ = 1 −
1
l
r
, (16)
with configuration parameters Ω and r. The step-size
calculation is initialised with configuration parame-
ter s
0
. With the step-size formula (15) (Bragin et al.,
2014) prove convergence of the surrogate SG method,
and they show that upon convergence the lower bound
property of dual cost is preserved.
4.2 Variable Neighbourhood Search
To solve a one job scheduling problem approximately
we propose a Variable Neighbourhood Search (VNS)
heuristics with the following neighbourhood struc-
tures. Let J denote the number of operations of the
job under consideration.
Neighbourhood Structure AM1: An operation j is
chosen at random, and a random alternative ma-
chine is assigned to j. If this move causes
the violation of precedence constraints, it is re-
jected. AM1 is configured with a distance param-
eter AM1
Dist
, denoting the number of operations
for whom alternative machines are assigned cas-
cadingly. Assigning an operation j to a different
machine implies that the duration is changed.
Neighbourhood Structure AM2: An operation j is
chosen at random, and a random alternative ma-
chine is assigned to j. The new beginning time
of j and all successive operations k > j is the re-
spective earliest feasible beginning time consider-
ing the precedence constraints, plus some small,
random slack. AM2 uses a distance parameter
AM2
Dist
.
Neighbourhood Structure SL: Applying SL to the
incumbent solution, a neighbour solution results
from a cascade of leftward shifts, starting with a
random operation j. Let x
SL
be the neighbour so-
lution after shifting j, and let σ denote the avail-
able slack between operations j − 1, j. The shift
distance SL
Dist
is a random integer from the inter-
val (1, σ). If σ = 0 the move SL is rejected. Other-
wise in the next step of the cascade operation j +1
is shifted leftward, with distance SL
Dist
. Succes-
sively the operations j, j + 1, ..., J are shifted left-
ward by SL
Dist
. After each shift the cost of the
resulting neighbour solution are evaluated accord-
ing to (9). The neighbour solution with minimal
cost is the result of applying SL.
Neighbourhood Structure SR: Analogous to SL the
neighbourhood structure SR defines a cascade of
rightward shifts, with a shift distance SR
Dist
. The
cascade starts with a random operation and ends
with the first operation.
In the shaking phase of the proposed VNS the neigh-
bourhood structure AM2 is used, with increasing val-
ues for AM2
Dist
. If no improvement is achieved, the
last shaking level is the generation of a new random
solution “in the neighbourhood” of the incumbent so-
lution. The term “neighbourhood” reflects the fact
that the beginning time of the first operation in the
random solution is within a maximal distance L to the
beginning time of the first operation in the incumbent
solution. However, this last level is a massive shak-
ing of the incumbent solution, and allows to bridge
broad valleys in the fitness landscape, guiding the lo-
cal search to new areas in the search space.
In the local search phase the neighbourhood struc-
tures SL → AM1 → SR are used, in the indicated se-
quence. Figure Algorithm 1 shows the pseudocode of
the proposed VNS algorithm. The algorithm is ini-
tialised in lines 2 - 7. An initial solution is generated
at random, and configuration parameters are set. The
indicated values for parameters A, B, F, L, G are exem-
plary. For a randomly generated solution, parameter
G denotes the maximal distance between two consec-
utive operations.
5 COMPUTATIONAL RESULTS
In computational experiments with the problem in-
stances outlined in figure 1 we compared the perfor-
mance of two algorithms:
1. Algorithm StDP : Standard SG solves the dual
problem, dynamic programming is used to solve
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
238

Algorithm 1: VNS Pseudocode.
1: Initialisation
2: x ← random solution
3: A ← 50 Number of VNS iterations
4: B ← 50 Number of local search iterations
5: F ← 3 The maximal value of AM 2
Dist
6: L ← 50
7: G ← 5
8: VNS iterations
9: for a ← 1, A do
10: f ← 1
11: while f ≤ F + 1 do Shaking loop
12: if f = F + 1 then
13:
b
x ← random solution “in the neighbourhood” of x
14: else
15: AM2
Dist
← f
16:
b
x ← AM2neighbour solution with incumbent solutionx
17: end if
18: for b ← 1, B do Local search iterations
19: for l ← 1, 3 do
20: if l = 1 then
21: x
0
← SL neighbour solution with incumbent solution
b
x
22: else if l = 2 then
23: AM1
Dist
= 1
24: x
0
← AM1 neighbour solution with incumbent solution
b
x
25: else if l = 3 then
26: x
0
← SR neighbour solution with incumbent solution
b
x
27: end if
28: if cost(x
0
) ≤ cost(
b
x) then
29:
b
x ← x
0
30: end if
31: end for
32: end for
33: if cost(
b
x) < cost(x) then
34: x ←
b
x
35: f ← 1
36: else
37: f ← f +1
38: end if
39: end while
40: end forreturn x
the sub-problems. SG configuration: α
0
= 2, Γ =
20.
2. Algorithm SuVNS : Surrogate SG solves the dual
problem, VNS solves the sub-problems. SG con-
figuration: s
0
= 0.2, Ω = 25, r = 0.1.
Both algorithms use a list scheduling algorithm
for feasibility repair. Our implementation supports
concurrent computing with respect to solving sub-
problems. The experiments were performed on the
following computer hardware: Intel
R
Core
TM
i7-6700
CPU @ 3.40GHz, 4 cores and 8 GB ram. On the
software side, the operating system was Microsoft
R
Windows
TM
10 Pro using Java 1.8 as programming
and execution environment.
Figure 2 shows the results of computational experi-
ments with 800 SG iterations, and feasibility repair
every 2 iterations. The deterministic algorithm StDP
was executed once per problem instance. To gather
statistical results for the non-deterministic algorithm
SuVNS, 10 runs were performed with SuVNS per
problem instance. In figure 2 column UB
∗
refers to
Variable Neighbourhood Search Solving Sub-problems of a Lagrangian Flexible Scheduling Problem
239
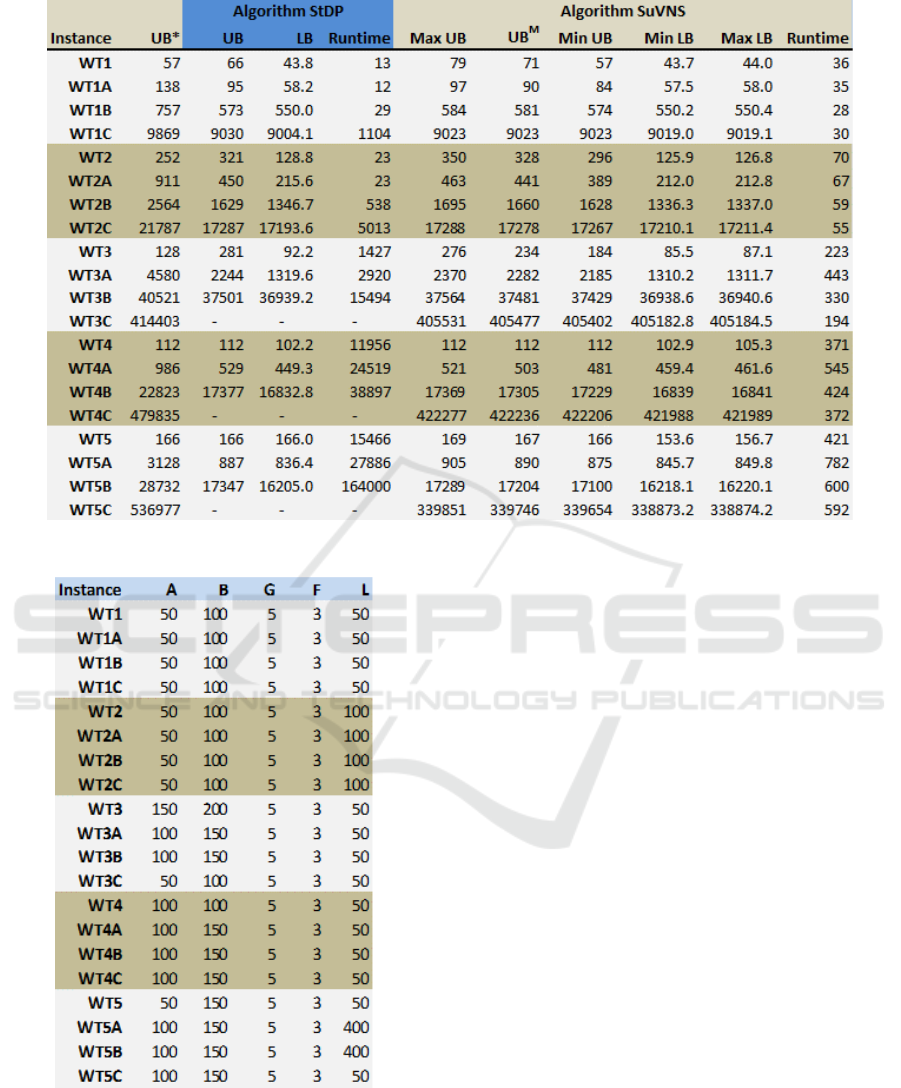
Figure 2: Computational results.
Figure 3: VNS configurations.
the best known value for total weighted tardiness for
the respective problem instance. For the instances
WT1-5 these values are taken from (Sobeyko and
M
¨
onch, 2015), for the FJSSTT instances they are
calculated with list scheduling. For algorithm StDP
lower and upper bound on total weighted tardiness
are indicated (columns LB,UB) as well as the runtime
in seconds. The columns Max UB,UB
M
, Min U B in-
dicate maximum, mean value and minimum for total
weighted tardiness calculated with algorithm SuVNS.
Minimium and maximum for lower bounds are given
in columns Min LB, Max LB. The VNS algorithm is
configured according to figure 3. The configurations
were determined in computational experiments with
sub-problems, benchmarking VNS with exact solu-
tions calculated with dynamic programming.
Analysing the results for problem instances WT1-
5, we note that the duality gap for instances indicates
if algorithms StDP and SuVNS work well on the in-
stance. The duality gaps for WT4 and WT5 are small,
and the algorithms provide upper bounds very close
or equal to the best known values. For WT2 and WT3
the duality gaps are distinct, and the calculated up-
per bounds significantly deviate from the best known
values. A remarkable result is provided by StDP for
WT5: the duality gap is 0, proving optimality of the
upper bound 166.
The results for the FJSSTT instances show a
strong dependence of the StDP runtime on the num-
ber of timeslots specified for the problem instance, cf.
figure 1. For WT3C, WT4C and WT5C we were not
able to calculate solutions with StDP and reasonable
runtime. The algorithm SuVNS is clearly advanta-
geous in terms of runtime, and the upper bounds are
of good quality, comparing them with StDP results.
ICORES 2017 - 6th International Conference on Operations Research and Enterprise Systems
240

6 CONCLUSIONS
The computational experiments have shown promis-
ing results. However, the list scheduling method em-
ployed for feasibility repair is rather weak, and we ex-
pect a more sophisticated heuristic to improve the re-
sults. Furthermore, it is advisable to extend the com-
putational experiments to more problem instances.
So far we have been concerned with static
scheduling problems. In a dynamic scheduling prob-
lem, a schedule is executed and disturbances like
transportation delays or machine failures hamper the
scheduled processing of operations. It would be in-
teresting to apply the proposed, distributed algorithm
to dynamic scheduling problems, and to explore the
possibilities of localised disturbance handling.
As a next step we want to improve the quality of
the feasibility repair mechanism. Also more experi-
ments with MK problems will take place. The algo-
rithm will be extended to allow dynamic rescheduling
(e.g. in case of a machine break down).
ACKNOWLEDGEMENTS
This research is funded by the Austrian Min-
istry for Transport, Innovation and Technology
www.bmvit.gv.at through the project NGMPPS-DPC.
REFERENCES
Baptiste, P., Flamini, M., and Sourd, F. (2008). Lagrangian
bounds for just-in-time job-shop scheduling. Comput-
ers & Operations Research, 35(3):906–915.
Bragin, M. A., Luh, P. B., Yan, J. H., Yu, N., and Stern,
G. A. (2014). Convergence of the Surrogate La-
grangian Relaxation Method. Journal of Optimization
Theory and Applications, 164(1):173–201.
Brandimarte, P. (1993). Routing and scheduling in a flex-
ible job shop by tabu search. Annals of Operations
research, 41(3):157–183.
Buil, R., Piera, M. A., and Luh, P. B. (2012). Improve-
ment of lagrangian relaxation convergence for produc-
tion scheduling. Automation Science and Engineer-
ing, IEEE Transactions on, 9(1):137–147.
Chen, H., Chu, C., and Proth, J.-M. (1998). An im-
provement of the Lagrangean relaxation approach
for job shop scheduling: a dynamic programming
method. Robotics and Automation, IEEE Transactions
on, 14(5):786–795.
Chen, H. and Luh, P. B. (2003). An alternative frame-
work to Lagrangian relaxation approach for job shop
scheduling. European Journal of Operational Re-
search, 149(3):499–512.
Hoitomt, D. J., Luh, P. B., and Pattipati, K. R. (1993).
A practical approach to job-shop scheduling prob-
lems. Robotics and Automation, IEEE Transactions
on, 9(1):1–13.
Kaskavelis, C. A. and Caramanis, M. C. (1998). Effi-
cient Lagrangian relaxation algorithms for industry
size job-shop scheduling problems. IIE transactions,
30(11):1085–1097.
Sobeyko, O. and M
¨
onch, L. (2015). Heuristic Ap-
proaches for Scheduling Jobs in Large-scale Flexible
Job Shops. Computers & Operations Research. ac-
cepted for publication.
Wang, J., Luh, P. B., Zhao, X., and Wang, J. (1997). An
optimization-based algorithm for job shop scheduling.
Sadhana, 22(2):241–256.
Variable Neighbourhood Search Solving Sub-problems of a Lagrangian Flexible Scheduling Problem
241
