
Quality Enhancement Techniques for Building Models
Derived from Sparse Point Clouds
Steffen Goebbels and Regina Pohle-Fr¨ohlich
Institute for Pattern Recognition, Faculty of Electrical Engineering and Computer Science,
Niederrhein University of Applied Sciences, Reinarzstr. 49, 47805 Krefeld, Germany
Keywords:
Point Clouds, Building Reconstruction, CityGML, Linear Optimization, True Orthophotos.
Abstract:
This paper describes processing steps that improve both geometric consistency and appearance of CityGML
models. In addition to footprints from cadastral data and sparse point clouds obtained from airborne laser
scanning, we use true orthophotos to better detect and model edges. Also, procedures to heal self-intersection
of polygons and non-planarity of roof facets are presented. Additionally, the paper describes an algorithm
to cut off invisible parts of walls. We incorporate these processing steps into our data based framework for
building model generation from sparse point clouds. Results are presented for German cities of Krefeld and
Leverkusen.
1 INTRODUCTION
During recent years, 3D city models have become
increasingly important for planning, simulation, and
marketing, see (Biljecki et al., 2015). CityGML is
the XML based standard for exchanging and storing
such models, see (Gr¨oger et al., 2012). A common
approach to automate the generation of city models
is to use cadastral data in combination with point
clouds from airborne laser scanning. However, pub-
licly available point clouds of our home country of-
ten are sparse and currently consist of less than ten
points per square meter. This makes it very difficult
to recognize small roof structures which are typical
for dormers and tower roofs.
There are two main approaches to roof reconstruc-
tion (see (Tarsha-Kurdi et al., 2007), cf. (Haala and
Kada, 2010; He, 2015; Henn et al., 2013; Perera and
Maas, 2012)): Model driven approaches select stan-
dard roofs from a catalogue so that they optimally fit
with the points from the cloud. In general, only larger
roof structures find their way into these building mod-
els. To the contrast, data driven methods detect planes
and combine even small roof facets to complete roofs
(see e. g. (Elbrink and Vosselman, 2009; Kada and
Wichmann, 2013)). Our experiments in (Goebbels
and Pohle-Fr¨ohlich, 2016) show that a data driven ap-
proach even is able to deal with dormers, but their
outline might be distorted due to sparse coverage by
laser scanning points. Therefore, one needs additional
information to correctly model such small structures.
For example, in (Wichmann and Kada, 2016) simi-
lar dormers are detected to merge their point clouds.
Thus, a prototype dormer model can be generated
based on a much higher point density. Also, Demir et.
al. describe in (Demir et al., 2015) a procedure to de-
tect repeating structures in point clouds. In this paper
Figure 1: Orthophoto (left) vs. true orthophoto (right).
we use true orthophotos as additional information. An
orthophoto is a geometrically corrected areal photo
that fits with the coordinate system at ground level.
In a true orthophoto, not only the ground level fits
with the coordinate system but also all levels above
the ground including the roof, see Figure 1. We de-
tect edges of such photos and adjust models according
to these edges.
The given paper is not only concerned with better
modeling structures but also with improving geomet-
Goebbels S. and Pohle-FrÃ˝uhlich R.
Quality Enhancement Techniques for Building Models Derived from Sparse Point Clouds.
DOI: 10.5220/0006103300930104
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 93-104
ISBN: 978-989-758-224-0
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
93

ric consistency, cf. (Gr¨oger and Pl¨umer, 2009; Zhao
et al., 2013). One can apply general methods for re-
pairing arbitrary 3D polygon models. But most build-
ing models have vertical walls, so that one only has
to deal with roof structures that can be projected to
2D. Zhao et al. propose an approach that corrects all
types of geometric error using shrink-wrapping that
works on a watertight approximationof the tessellated
building. Alam et al. (Alam et al., 2013) describe
methods to correct single geometric problems of ex-
isting CityGML models. We present complementary
and different processing steps to improve such single
aspects of geometric quality during model generation.
The algorithms deal with self-intersecting polygons,
planarity of polygons, and correctness of wall bound-
aries. Violation of planarity is a common problem of
city models. It is regarded as difficult to correct. We
fix missing planarity with a surprisingly simple but
powerful linear program. The ideas are applied but
not limited to CityGML.
2 PREVIOUS WORK
We apply the algorithms of this paper in connection
with our model generation workflow in (Goebbels and
Pohle-Fr¨ohlich, 2016), cf. Figure 2. In this section,
we shortly summarize our previous work and explain
how the subsequent sections contribute to this au-
tomated model generation workflow. However, our
workflow only serves as an example and might be re-
placed by other methods.
Figure 2: City model of our hometown.
We detect roof facets on a height map that is inter-
polated from the sparse point cloud. The height map
consists of a raster with 10 ×10 cm
2
cell size which
fits with the accuracy of data. It is partially initialized
with the cloud points. To complete the map, we use
an interpolation method that maintains step edges.
Before we detect roof planes using a RANSAC
algorithm, we first classify regions according to gra-
dient directions. To this end, we handle all regions
with gradients shorter than a threshold value as flat
roofs. These areas might have arbitrary and noisy
gradient angles. For remaining areas we determine
minima of a gradient angle histogram. Each inter-
val between two subsequent minima classifies the an-
gles that belong to roof facets with approximately the
same gradient direction. On regions of such homo-
geneous gradient angles we estimate planes and find
roof facets using RANSAC. Filtering by gradient an-
gles excludes outliers. It also avoids difficulties with
RANSAC. For example, we do not find planes that in-
tersect with many roof facets without themselves be-
ing a roof plane. The intermediate result is a 2D raster
map in which cells are colored according to the roof
facet they belong to.
We complete gaps in the raster map of roof facets
using region growing. To maintain the characteris-
tic appearance of the roof, we consider intersection
lines between estimated planes (ridge lines) and step
edges according to the height map as boundaries for
growing. However, small structures like dormers do
not show straight and parallel edges after this proce-
dure. To improve model quality, we now addition-
ally consider cadastral building part information and
edges that are visible in true orthophotos, see Section
4.
From the raster map we can directly determine in-
ner roof facets that completely lie within a surround-
ing facet. Such inner facets become openings in the
surrounding facet polygon. That is also true for open-
ings of a building’s footprint from cadastral data. Bor-
der polygons of other openings are outer polygons of
inner roof facets (with inverse orientation) so that we
only have to detect outer polygons.
We determine each roof facet’s outer 2D boundary
polygon using Pavlidis algorithm that moves along
the facet’s contour. Leading to a watertight roof,
we determine and merge polygon segments that are
shared between adjacent facets. A topologically rele-
vant vertex is a vertex at which more than two roof
facets meet. Such vertices are detected. Then 2D
roof polygons are simplified using a modified Ramer-
Douglas-Peucker algorithm. This algorithm does not
allow topologically relevant vertices to be removed
from the polygons. Therefore, the roof remains wa-
tertight.
To overcome the precision that is limited by the
10×10 cm
2
cell size, we project vertices to edges of
the cadastral footprint and to intersection lines (ridge
edges) as well as to intersection points of ridge lines.
This might lead to self-intersecting polygons. A so-
lution to resolve this problem is described in Section
5.
To generate a 3D model, height values have to be
added to the 2D polygons. These heights are com-
puted using estimated plane equations. To avoid small
artificial step edges, mean values are used for vertices
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
94

with same x- and y-coordinates but only slightly dif-
ferent z-coordinates that lie within a threshold dis-
tance. This deliberately violates planarity of roof
facets. To heal this problem, we use linear opti-
mization in a post-processing step, see Section 6.
CityGML requires planarity, see (Gr¨oger et al., 2012,
p.25). To some extend, many city models violate this
requirement, cf. (Wagner et al., 2013), and can be cor-
rected using our linear program. However, our work-
flow can alternatively generate planar roof facets by
not using mean values and allowing small step edges.
Then linear optimization can be used to eliminate step
edges instead of establishing planarity, see Section 8.
Another CityGML requirement is that, together
with the ground plane, roof and wall polygons com-
pletely belong to a building’s outer hull. Therefore,
we have to cut away invisible segments of walls. The
linear program for planarization might change slopes
of roof facets which in turn influences visibility of
walls. In Section 7 we finally describe a wall pro-
cessing step that has to run after planarization.
The complete workflow consists of following
steps:
• Computation of a height map that is interpolated
from the point cloud
• Estimation of roof facets in 2D raster domain
• Adjusting boundaries, see Section 4
• Contour detection gives 2D boundary polygons
• Simplification of boundary polygonsand mapping
to ridge lines, step edges, etc. (might lead to addi-
tional self-intersections)
• Resolving self-intersections (see Section 5)
• Adding z-coordinate values
• Planarization of roof facets (see Section 6)
• Cutting and merging walls to visible segments
(see Section 7)
3 REFERENCE DATA SET
We apply the presented techniques to a square kilo-
meter of the city center of the German city of Krefeld
with 3987 buildings that we process from a sparse
point cloud with five to ten points per square meter,
see Figure 3. The area corresponds to the UTM inter-
val [32330000,32331000]×[5689000, 5690000]. Ad-
ditionally, we use data of the city of Leverkusen.
Figure 3: City center as reference data set.
4 ADJUSTING BOUNDARIES OF
ROOF FACETS
In our workflow, we generate a 2D raster map in
which pixel colors refer to corresponding roof facets,
see Figures 4–6. However, due to the sparse point dis-
tribution of the reference laser scanning data, bound-
ary contours of small structures like dormers are not
straight and are only approximately correct. There
are also gaps in the raster map. We complete the
map and optimize boundary contours by applying re-
gion growing. The idea is to find candidates of true
boundaries that become limits for the growing pro-
cess. We obtain such candidate lines from the point
cloud as well as from additional data sources. For
example, we compute intersection lines of estimated
plane equations that correspond with ridge lines, see
Figure 4. Cadastral footprints of building parts (see
Figure 4: Intersection lines between estimated planes.
Figure 5) and edges of true orthophotos are additional
information. It is important that additional data are
optional and not required. Only a minority of build-
ings possess building part definitions and such cadas-
tral data often do not cover dormers. If available,
one can generate a true orthophoto from overlapping
areal images - for example using the Structure from
Motion algorithm. Our pictures were computed from
such overlapping photos. An alternative method is to
improve orthophotos with the help of terrain and 3D
building models. Vice versa, there also exist various
approaches to combine LIDAR point clouds with in-
Quality Enhancement Techniques for Building Models Derived from Sparse Point Clouds
95

Figure 5: Raster maps of roof facets (left): Red cadastre
polygons are borders of building parts, black areas could
not be associated with roof facets. The picture on the right
hand side shows the derived model.
formation from areal images to improve 3D building
modeling. For example, Tong et. al. (Tong et al.,
2012) use edges of (true) orthophotos to adjust step
edges of flat roofs in a city model that is based on a
Delauny triangulation. Arefi and Reinartz (Arefi and
Reinartz, 2013) decompose buildings and fit paramet-
ric roof models according to ridge lines detected from
true orthophotos. In our experiments, we try to uti-
lize all types of edges to adjust roof boundaries that
already have been obtained from the point cloud.
We use true othophotos with pixels that represent
areas of 10 ×10 cm
2
. Although the photos originate
from areal images with only 60% horizontal and 50%
vertical overlap,edges of the images fit well with laser
scanning data within our computing tolerance of 10
cm
2
, cf. Figure 6. However, edges tend to be not ex-
actly straight. Also, a minor problem is that roofs may
have textures showing tiles or tar paper with many
edges. Unfortunately, shadows lead to more signif-
icant additional edges. A lot of research deals with
Figure 6: Red pixels belong to edges of a true orthophoto.
Colored areas belong to planes that we detect in the laser
scanning point cloud. Both data sources match quite well.
Small dormers are not sufficiently covered by laser scanning
points. Boundaries of larger dormers can be adjusted to the
edges.
removal of shadows, cf. (Guo et al., 2011) and the
literature cited there. However, our experiments with
the algorithm of (Finlayson et al., 2002) did not gave
sufficient results. A reason might be the variety of col-
ors of our arial photos. But in our processing pipeline,
edges only act as limits for region growingand are not
used to detect roof facets. Therefore, wrongly placed
edges do not heavily disturb results: If an edge crosses
an interior region of a roof facet, then the facet’s area
grows on both sides of the edge. Thus, the edge be-
comes no boundary of the facet. However, shadows
may hide useful edges.
To find relevant edges with Canny edge detector,
one has to individually find a threshold that excludes
irrelevant edges from textures. Instead, we gener-
ate a kind of principal curvature image without need-
ing to select a threshold value, see Figure 7. After
anisotropic filtering, we convert the orthophoto to a
grey image and compute second partial derivatives for
each pixel position in terms of a Hessian matrix, a
symmetric matrix with real eigenvalues. Then we fil-
ter for pixel positions for which the matrix has a lo-
cally largest absolute eigenvalue, i.e., in terms of ab-
solute values, the eigenvalue has to be larger than the
eigenvalues of Hessian matrices of the two horizontal,
vertical or diagonal neighbors. At such positions, an
eigenvector
~
d
λ
of the eigenvalue λ with largest abso-
lute value |λ| points into the direction of largest ab-
solute curvature. It is orthogonal to an eigenvector
~
d
µ
of the eigenvalue µ, |µ| ≤ |λ|. If additionally |λ| > 0
and |µ| ≈ 0, then curvature is large in one direction
only and
~
d
µ
is orthogonal to that direction. Thus,
~
d
µ
is parallel to an edge. We mark the corresponding po-
sition in a picture E of edges. Typically, the Hessian
matrix is used to find positions like corners, where
local geometry changes in two directions. We use it
differently to detect changes that only occur in one di-
rection. As a side effect, this direction can be used to
filter for edges that are parallel or orthogonal to seg-
ments of the building’s footprint.
Edges might be not connected in E. We connect
them by computing the principal curvature image in a
higher resolution. A reduction of the resolution (su-
persampling) then closes most gaps.
Figure 7: Results of Canny edge detector (middle) vs. our
curvature based method (right).
Once we have derivedboundariesfor region grow-
ing, we eliminate noise near computed and detected
edges, especially near pixels of E. Noise consists of
pixels at the wrong side of a line. To this end, we re-
move pixels that represent points closer than 30 cm
to these lines, depending on the type of line. Then,
in a first pass of region growing, we expand each col-
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
96

ored area into the free space that has been created by
removing pixels of the area’s color. In doing so, we
do not cross the lines under consideration. The out-
come is that pixels on wrong sides of lines are deleted.
This gives straight boundaries at ridge lines, at edges
of building parts and at edges of the true orthophoto.
However, by deleting pixels, facets might become un-
connected. Such facets have to be split up into sepa-
rate connected components.
In a second pass of region growing, we let the col-
ored regions grow until they collide or reach one of
the previously discussed lines or pixels of E. Addi-
tionally, large height jumps (step edges) in the height
map limit region growing. Step edges with small
height differences can not be detected from the inter-
polated height map dependably. Here the edges from
orthophotos come into play.
A third pass of region growing is needed to take
care of areas that are still not colored. In this pass,
only other regions and the footprint from cadastral
data act as boundaries.
Figure 8 shows excerpts from a city model before
planarization is performed (see Section 6). Region
growing based on edges of the true orthophoto sig-
nificantly improves the original model. However, due
to the resolution of data and quality of true orthopho-
tos, the outcome is far from being perfect. But it is a
good basis to apply heuristics that lead to parallel or
orthogonal edges.
5 CORRECTING
SELF-INTERSECTING ROOF
POLYGONS
Each roof facet consists of exactly one outer polygon
and zero or more inner polygons that define open-
ings within the roof. The outer polygon is oriented
counter-clockwise, the inner polygons are oriented
clockwise. CityGML does not allow polygons to have
self-intersections. However, such intersections often
do occur either because of the roof’s topology or be-
cause of over-simplification. Therefore, we recur-
sively have to split up polygons until all intersections
are eliminated. We do this in the x-y-plane and add
height values (z-coordinates) later. To begin with, we
compute all points of self-intersection. If an intersec-
tion point is no known vertex, then we add it as a new
vertex to the polygon, cf. (Bogdahn and Coors, 2010).
But we also add it to all other polygons that cross that
point. This is necessary to easily decide about wall
visibility, see Section 7. Now, we haveto split up each
polygon at vertices that occur more than once within
Figure 8: Boundaries of the upper model are adjusted to
edges of a true orthophoto. This results in the second pic-
ture. Due to the region growing algorithm, some small roof
segments vanish, other small facets appear.
the polygon.
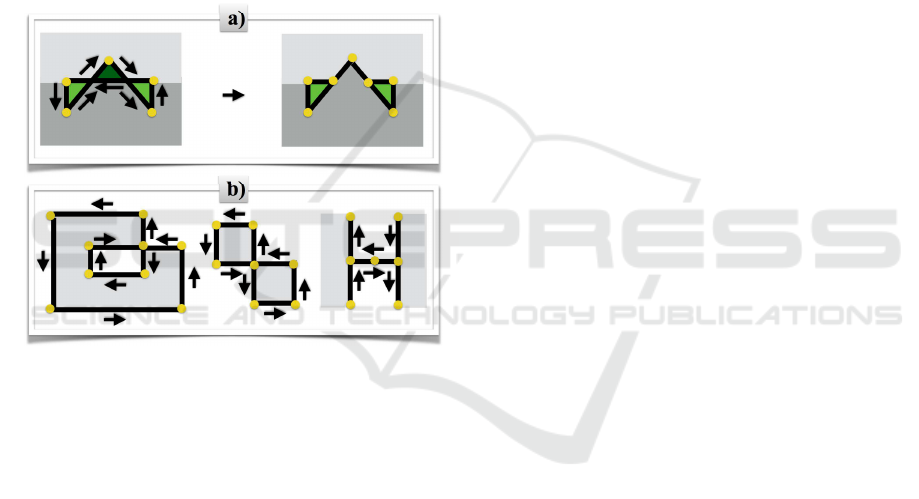
To simplify the outer polygon, we have to distin-
guish between two general cases of self-intersection
at a vertex: The polygon might really cross itself (case
a)) or it is tangent to itself (case b) ). We resolve inter-
sections using two passes. The fist pass handles case
a), the second one deals with b):
a) This is an error situation that might occur if one
snaps vertices to other places like ridge lines. For
example, vertex A in Figure 9a) might have been
moved upwards. After dividing the polygon into
non-self-intersecting segments, all segments with
clockwise orientation (like the dark green triangle
in the figure) have to be removed. The space cov-
ered by this segment might also be shared with
Quality Enhancement Techniques for Building Models Derived from Sparse Point Clouds
97
multiple adjacent roof facets. To heal this error
in practice, it is often sufficient to snap the wrong
segment’s vertices to the nearest vertex of the seg-
ment’s longest edge.
b) This is a regular situation. As in a), we split up
into non-self-intersecting polygons. We discard
polygons with zero area that occur if there are
edges that are used twice (different directions of
traverse, see edges between vertices A and B in the
second example of Figure 9b)). All segments with
counter-clockwise orientation become new outer
polygons. The second example of Figure 9b) is re-
solved to two outer polygons. All segments with
clockwise orientation become additional new in-
ner polygons. This happens in the first example
of Figure 9b).
a)
b)
A
A
A
A
A B
Figure 9: Resolving self-intersections.
To simplify previously existing inner polygons,
we first merge them if possible: We compute a list
of all edges of all inner polygons. Then we remove
edges that occur twice but with different direction of
traverse. We put together remaining edges to new in-
ner polygons. Then we split them up in the same man-
ner as the outer polygon with one exception: Under
the preliminary that openings like the one in the first
example of 9b) are not part of the outer surrounding
facet, openings of inner polygons are not relevant, we
do not have to recursively generate inner polygons of
inner polygons. Thus, such polygons are discarded.
Now, the roof facet is decomposed into a list of
one or more non-self-intersecting outer polygons and
a list of zero or more non-self-intersecting inner poly-
gons. For each inner polygon, we have to find the
unique outer polygon that surrounds it. Then we can
write a separate roof facet for each outer polygon with
its corresponding openings, i.e., inner polygons.
For the square kilometer of the city center, the al-
gorithm has to resolve 174 points of self-intersection
with crossing. These points result from merging ver-
tices and snapping vertices to ridge lines. Also, poly-
gons are separated at 450 tangent points.
6 PLANARIZATION OF ROOF
FACETS
CityGML only offers primitives to describe planar
surfaces. Therefore, e.g., dome roofs or curved roofs
have to be approximated by plane fragments. How-
ever, often CityGML models violate planarity to some
extend. The easiest way to heal non-planar surfaces
is to triangulate them. This actually is done in prac-
tice, see (Boeters et al., 2015). More sophisticated
algorithms optimize roof structures. By locally ad-
justing a single roof facet to become planar, adjacent
facets might loose this property. Therefore, in con-
trast to the algorithm in (Alam et al., 2013), we solve
a global optimization problem to establish planarity
of all roof facet’s at the same time. Due to the lin-
ear nature of roof planes, linear programming appears
to be an appropriate means. This approach differs
from more general shape preserving algorithms based
on non-linear optimization, cf. (Bouaziz et al., 2012;
Deng et al., 2015; Tang et al., 2014) and the literature
cited there. Non-linear optimization of energy func-
tions in fact is standard in architecture reconstruction.
Another example ist the work of Arikan et al. (Arikan
et al., 2013). They use a Gauss-Seidel algorithm to
snap together polygons.
We execute the linear program with the simplex
algorithm that is implemented in the GNU Linear
Programming Kit library GLPK (Makhorin, 2009). In
brief, the basic idea behind such a linear program is
presented in (Goebbels et al., 2017). Here we give an
extended description that also covers additional rules
and refinements that are necessary to make the solu-
tion work in practice.
P
k
, k ∈ {1, 2, ...,n}, denotes a roof polygon with
vertices p
k,1
,. . ., p
k,m
k
∈V,
p
k, j
= (p
k, j
.x, p
k, j
.y, p
k, j
.z),
where V ⊂ R
3
is the roof’s finite vertex set.
The task is to replace z-coordinates p
k, j
.z with
new height values
p
k, j
.h = p
k, j
.z+ p
k, j
.h
+
− p
k, j
.h
−
,
p
k, j
.h
+
, p
k, j
.h
−
≥ 0, such that the polygons become
planar. We do not change x- and y-coordinates dur-
ing this processing step. This is important to keep
the footprint from cadastral data and to obtain a linear
optimization problem. A related approach for quad-
rangular meshes is presented in (Mesnil et al., 2016).
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
98
It propagates z-coordinated changes by solving linear
equations to keep surface elements planar.
For each polygon P
k
, we determine three non-
collinear vertices p
k,u
, p
k,v
, and p
k,w
such that, if pro-
jected to the x-y-plane, p
k,u
and p
k,v
have a largest
distance. Then p
k,w
is selected such that the sum
of x-y-distances to p
k,u
and p
k,v
becomes maximal
and vectors~a
k
:= (p
k,u
.x− p
k,v
.x, p
k,u
.y− p
k,v
.y) and
~
b
k
:= (p
k,w
.x − p
k,v
.x, p
k,w
.y − p
k,v
.y) become linear
independent.
We compare all vertices of P
k
with the
reference plane defined by the three points
(p
k,u
.x, p
k,u
.y, p
k,u
.h), (p
k,v
.x, p
k,v
.y, p
k,v
.h), and
(p
k,w
.x, p
k,w
.y, p
k,w
.h).
According to CityGML guidelines, one has to
consider all combinations of three non-collinear ver-
tices and compare against the corresponding planes
(see (SIG3D, 2014, p.5)). But for numerical stability
we restrict ourselves to the previously selected ver-
tices with large distances.
We can uniquely write each point (p
k, j
.x, p
k, j
.y),
j ∈ {1,...,m
k
}, as linear combination
(p
k, j
.x, p
k, j
.y) = (p
k,v
.x, p
k,v
.y) + r
k, j
~a
k
+ s
k, j
~
b
k
with scalars r
k, j
, s
k, j
. Using constants
c
k, j
:= −p
k, j
.z+ (1−r
k, j
−s
k, j
)p
k,v
.z
+r
k, j
p
k,u
.z+ s
k, j
p
k,w
.z,
we introduce auxiliary variables α
k, j
defined by
α
k, j
:= −p
k, j
.h
+
+ p
k, j
.h
−
+(1−r
k, j
−s
k, j
)(p
k,v
.h
+
− p
k,v
.h
−
)
+r
k, j
(p
k,u
.h
+
− p
k,u
.h
−
)
+s
k, j
(p
k,w
.h
+
− p
k,w
.h
−
) + c
k, j
. (1)
If the facet P
k
is planar then α
k, j
= 0 for all j. But be-
cause coordinates typically are rounded to three dec-
imals in CityGML model files, we have to allow α
k, j
to be within certain bounds:
−δ
k
≤ α
k, j
≤ δ
k
.
To define bound δ
k
, let ν
k
be the reference plane’s
normal vector. Since the plane belongs to a roof facet,
we can assume ν
k
.z > 0. Let µ be an error threshold
(for example µ := 0.001 m if coordinates are given in
millimeters), then
δ
k
:= µ+
p
1−ν
k
.z
2
ν
k
.z
·
√
2·µ. (2)
This means that each vertex p
k, j
has to be closer to
the reference plane than
ν
k
.z·δ
k
= µ
ν
k
.z+
√
2
p
1−ν
k
.z
2
.
The right side reaches a maximum for ν
k
.z = 1/
√
3
so that the maximum distance to the plane is less or
equal
√
3µ.
In bound (2), the first summand µ allows z-
coordinates to vary up to µ. The second expression
is constructed to take care of deviations into x- and y-
directions up to µ. Depending on the normal ν
k
, such
deviations result in height changes on the reference
plane that are up to a magnitude of
√
1−ν
k
.z
2
ν
k
.z
·
√
2·µ. If
the roof facet has large slope and appears to be nearly
vertical, then ν
k
is close to zero and we allow large
deviations of z coordinates. When processing the ref-
erence data, such larger bounds in fact are required to
maintain the shape of some tower roofs, see Figure
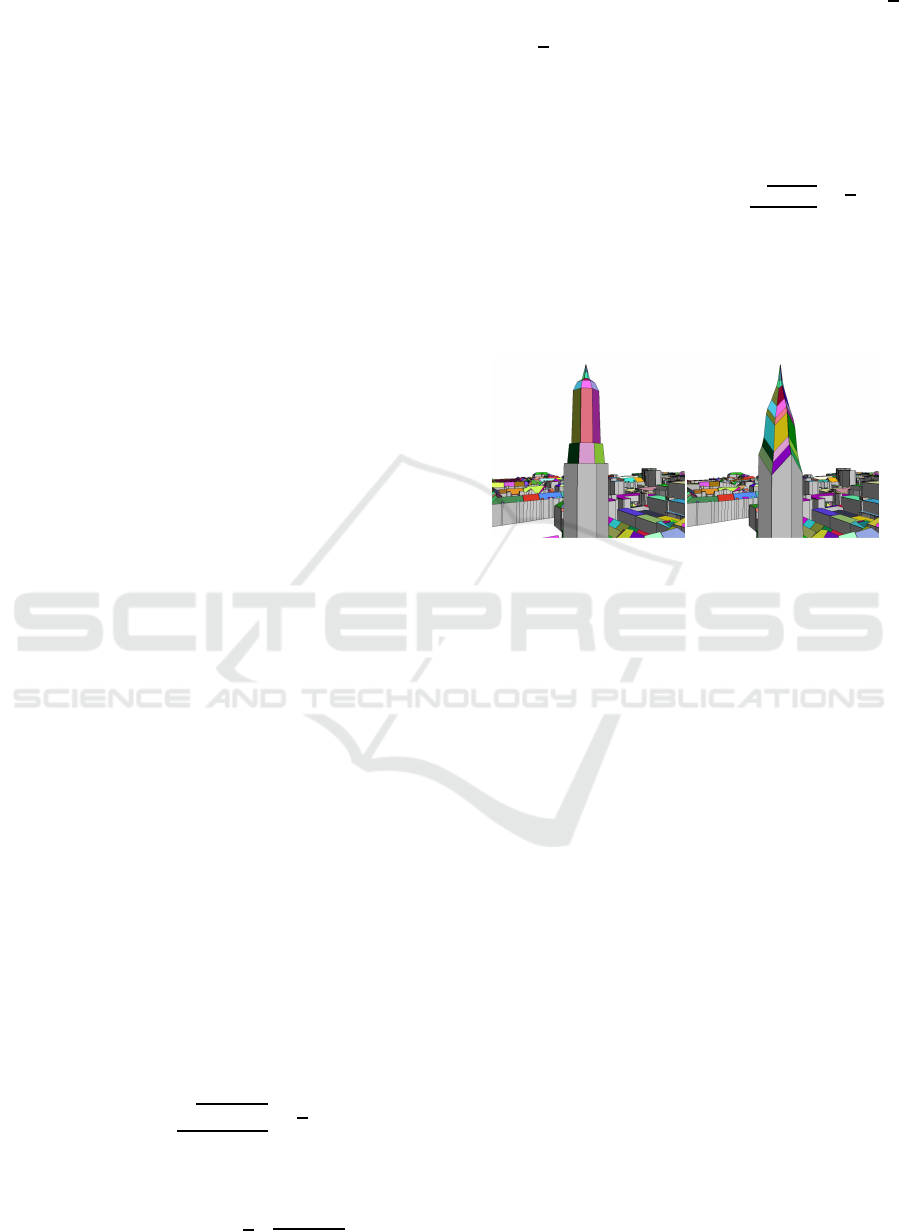
10.
Figure 10: If one chooses µ as a bound for height
changes and does not consider rounding errors of x- and y-
coordinates, then linear optimization changes the shape of
the tower (from left to right).
Depending on the model’s application, it might
be necessary to make changes to certain roof vertices
more expensive. For example this is the case if ver-
tices belong to facades that should be textured with
photos (cf. Figure 11). Such vertices often have x- and
y-coordinates that also occur within the terrain inter-
section curve of a building. We introduce costs to the
objective function in terms of the weights ω(p). Such
weights do not influence the existence of solutions.
Summing up, we use a linear program with struc-
tural variables p
k, j
.h
+
and p
k, j
.h
−
for p
k, j
∈V, aux-
iliary variables α
k, j
, k ∈ {1,. . .,n}, j ∈ {1, ...,m
k
},
and weights ω(p), p ∈V, see formulas (1, 2):
Minimize
∑
p∈V
ω(p)[p.h
+
+ p.h
−
]
s.t. p.h
+
, p.h
−
≥ 0, −δ
k
≤ α
k, j
≤ δ
k
for all p ∈V, k ∈ {1,.. . ,n}, j ∈ {1,. ..,m
k
}.
We are looking for a global minimum that always
exists because each flat roof is a feasible solution.
But the global minimum might require large height
changes for single vertices. To this end, we also intro-
duce a bound ε > 0 for height changes at each vertex:
p.h
+
≤ ε, p.h
−
≤ ε for all p ∈V.
Quality Enhancement Techniques for Building Models Derived from Sparse Point Clouds
99
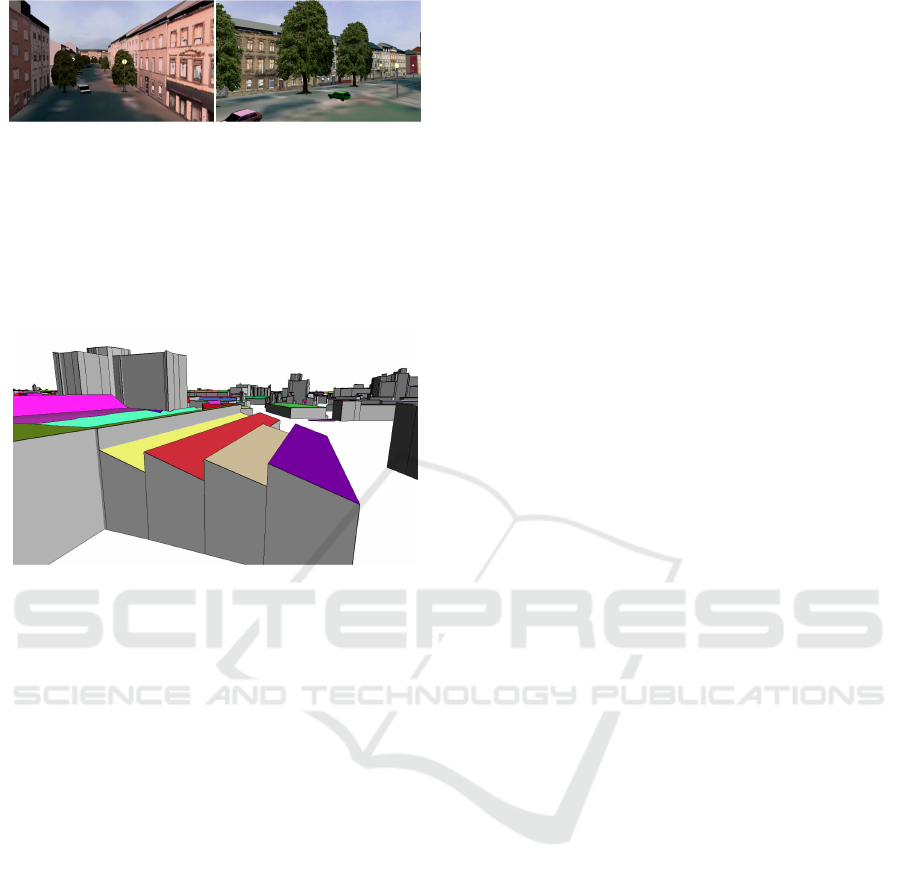
Figure 11: Texturing of facades requires higher precision
of z-coordinates. Black areas between textures and roofs
indicate that walls are too high whereas slopes of roof facets
are too small.
If one chooses ε too small, then there might be no
feasible solution. Therefore, we start planarization of
a building with a small value (ε = 0.1 m) and then
iteratively double it until a solution is found.
Figure 12: Shed roofs or dormers have walls (step edges)
within a roof.
If there are vertices with same x- and y-
coordinates but different z-values (see Figure 12),
then in an optimal solution the order of their z-
coordinates might be different. Then the set of vis-
ible walls and the appearance of the roof might also
change. To avoid this, we sort the vertices by increas-
ing z-coordinates. Let v
1
,··· , v
l
∈V be vertices with
v
i
.x = v
j
.x, v
i
.y = v
j
.y, 1 ≤i, j ≤ l and
v
1
.z ≤v
2
.z ≤··· ≤ v
l
.z.
For 1 ≤ i < l we add constraints
v
i+1
.z+ v
i+1
.h
+
−v
i+1
.h
−
−v
i
.z−v
i
.h
+
+ v
i
.h
−
≥0.
(3)
Although we use weights to make changes to fa-
cades more expensive, experiments show that vertices
of upper wall edges might change their heights in-
dependently. Vertices with the same original height
then might get different z-coordinates so that corre-
sponding facade edges get a wrong slope. Therefore,
we collect all pairs of vertices of upper facade edges
for which the vertices have approximately the same
z-coordinates. Then we add rules that ensure that for
each pair the new height values do not differ to much
from each other.
Also, one has to add lower bounds v.z + v.h
+
−
v.h
−
≥ b to ensure that changed height values are not
below the ground plane z-coordinate b of each build-
ing.
If two roof polygons share three or more non-
collinear vertices then optimization can’t find differ-
ent planes for these polygons. Therefore, prior to
running the linear program, we analyze sequences
of three consecutive non-collinear vertices that are
shared with same z-coordinates between each two
roof facets. If one roof facet is an inner polygon of the
other facet then we merge both roof segments. This
reduces the number of roof facets and simplifies the
model. Otherwise, if the z-coordinate of the middle
vertex was replaced by a mean value to avoid step
edges, we undo that modification.
Nevertheless, the optimization changes normal
vectors of roof segments. We allow that. But if one
wants to exclude such solutions that involve larger
changes of normal vectors, one can add further re-
strictions to the linear program that bound x- and y-
coordinates of normal vectors only to vary in a cer-
tain range defined by κ ≥ 0. In order to keep con-
straints linear in p.h = p.h
+
− p.h
−
, we do not nor-
malize cross products of vectors that contain struc-
tural variables. Let
˜
ν := (p
k,v
− p
k,u
) ×(p
k,w
− p
k,u
)
then conditions read (1 ≤k ≤ n):
−κ|
˜
ν|≤[(p
k,v
.y− p
k,u
.y)(p
k,w
.h− p
k,u
.h)
−(p
k,v
.h− p
k,u
.h)(p
k,w
.y− p
k,u
.y)] −
˜
ν.x ≤ κ|
˜
ν|.
−κ|
˜
ν|≤[(p
k,v
.h− p
k,u
.h)(p
k,w
.x− p
k,u
.x)
−(p
k,v
.x− p
k,u
.x)(p
k,w
.h− p
k,u
.h)] −
˜
ν.y ≤ κ|
˜
ν|.
Under these restrictions, optimization of some build-
ings may fail so that roofs keep unevennesses. There
is a trade-off between planarity and authenticity of
roof slopes.
In our reference data set, 59% of buildings be-
come 0.001-approximate planar if we set threshold
value ε to 0.1. We do not use GLPK’s exact ratio-
nal arithmetic because of performance issues. The
standard float arithmetic causes some rounding errors.
If we apply the algorithm to its own output, then we
see that still not all buildings have approximate pla-
nar roof facets. But then all buildings become ap-
proximate planar with ε = 0.1. Thus, the true share
of buildings that are already given with approximate
planar roof facets is up to 59%.
If we successively double ε to 0.2, 0.4, 0.8, 1.6,
and 3.2, an additional number of 11%, 10%, 10%,
6%, and 3% of buildings become approximate planar
through optimization. All buildings become approx-
imate planar by choosing ε = 6.4. Figure 13 shows
what happens to the complex roof of a church. Run-
ning time for a single-threaded implementation is less
than five seconds on an i5 processor.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
100
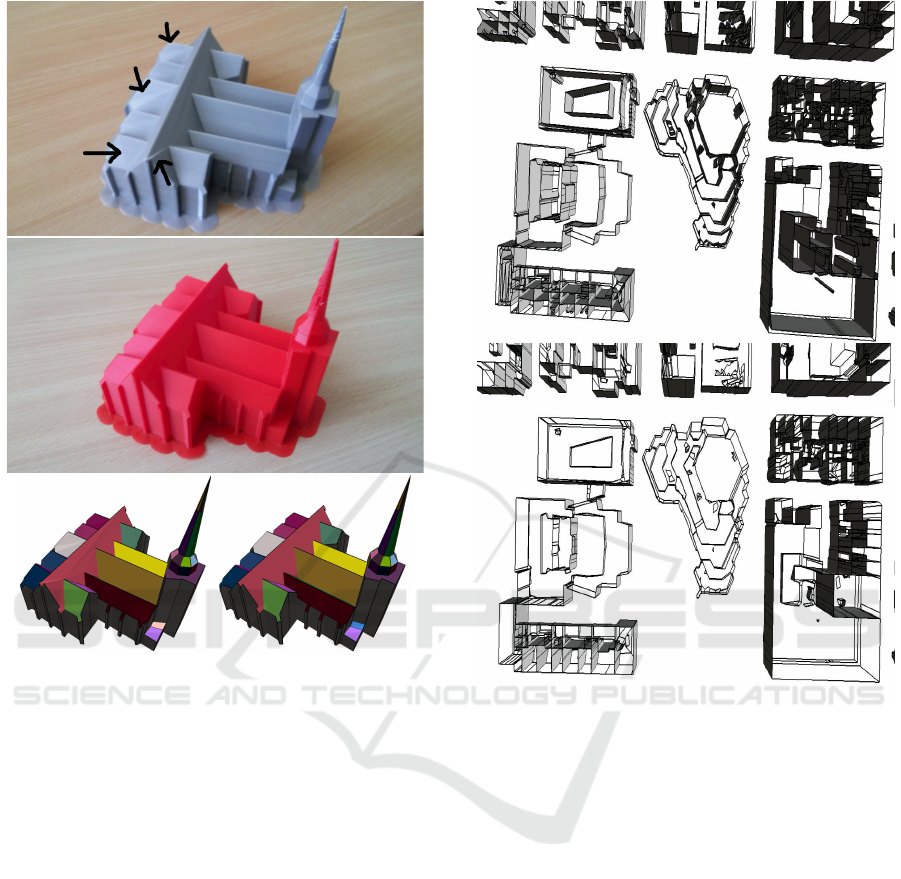
Figure 13: Two 3D prints of a church: The silver version
shows the situation before linear optimization. Non-planar
roof facets are triangulated, and some triangles show differ-
ent slopes than others. The red model is the result of pla-
narization. It is free of such artifacts. The figure also shows
visualizations of the two models with different colors for
each roof facet.
7 POST-PROCESSING OF WALLS
After finding planar roof polygons, we generate ver-
tical walls that reach from roof edges down to the
ground plane. The height of the ground plane is taken
from a digital elevation model. At this point in time,
each wall polygon has four different vertices. To gen-
erate a well-formed CityGML model, we now have
to cut off invisible parts of the walls, see Figure 14.
To this end, we use the precondition that no vertex of
a roof or wall polygon lies on the inner part of any
roof or wall edge. Thus, any vertex also is a vertex of
all adjacent polygons. Therefore, we can determine
visibility by comparing the pair of upper vertices of
each wall with all roof edges between pairs of ver-
tices that have the same x- and y-coordinates as the
two wall vertices. With one exception, there can be at
Figure 14: Walls of a conference center and theatre are dis-
played as wire frames, if their normal vector points away
from the view point. Otherwise they are painted grey. The
first figure shows the model with uncut walls. The second
picture only shows parts of walls that are visible from the
outside of each single building (without considering neigh-
bor buildings). The view points through the ground surface
to the sky.
most two roof edges that fulfill this condition. The ex-
ception is the existence of openings that are modeled
using inner polygons. Other roof facets can be posi-
tioned within openings. If two inner polygons share
a common edge, then there might be up to four roof
edges that have to be considered. Thus we exclude
walls that belong to edges shared between inner poly-
gons from further considerations since they do not be-
long to the building. The procedure in Section 5 takes
care of this.
Obviously, there has to be at least one (first) roof
edge with the same coordinates as the upper wall ver-
tices. If there is a second roof edge with exactly these
coordinates (including z-coordinates), then the edge is
a ridge line and no wall is needed. If there is no sec-
ond other roof edge with same x- and y-coordinates
Quality Enhancement Techniques for Building Models Derived from Sparse Point Clouds
101
(and arbitrary z-coordinates), then we deal with an
outer wall belonging to the building’s footprint. This
wall is completely visible. There are three remaining
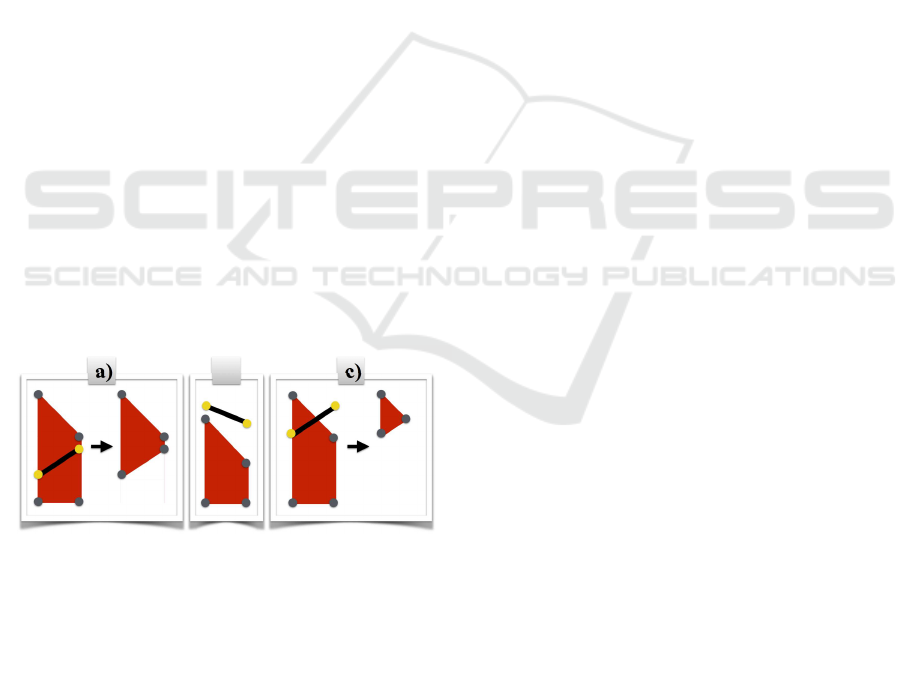
cases, see Figure 15:
a) z-coordinates of the upper wall vertices are both
greater than the corresponding z-coordinates of
the second roof edge: In this case, the lower edge
of the wall has to be replaced by the roof edge.
b) z-coordinates of the upper wall vertices are both
less or equal to the corresponding z-coordinates
of the second roof edge: The wall completely is
invisible because it is adjacent to a higher segment
of the building.
c) One z-coordinate of the upper wall vertices is
greater or equal and one z-coordinate is less or
equal to the corresponding z-coordinate of the sec-
ond roof edge: Only a triangle part of the wall
is visible. A new vertex has to be introduced at
the intersection point between the two edges. The
wall polygon is replaced by a triangle, and the new
vertexalso has to be inserted to affected roof poly-
gons.
Case c) is the reason why we cut off invisible parts
of walls only after the linear optimization step. Op-
timization leads to different slopes of roof edges,
so that intersection points might change x- and y-
coordinates. If we would add these intersection points
before optimization takes place, then we would pin
together both roof facets and do not allow x- and y-
coordinate changes. This reduces the number of fea-
sible solutions and might change the appearance of
the roof.
a)
c)
b)
Figure 15: Visibility analysis of walls: Red polygons repre-
sent walls and black edges are parts of roof facets.
For the tested square kilometer, 11,015 z-
coordinates of wall polygons are modified according
to case a), 36,619 wall polygons are removed along
case b), and 8,394 walls are replaced by a triangle as
described in case c).
Finally, adjacent walls with equal orientation can
be merged to larger polygons. This happens 15,416
times.
8 CONCLUSIONS AND FURTHER
WORK
Presented techniques have been successfully applied
to improve city models of the cities of Krefeld and
Leverkusen. However, for about 1% of buildings, en-
forcing planarity leads to visible changes of roofs’
appearances (z-coordinate errors of more than 2 m).
Section 6 describes a general approach to planariza-
tion that can be applied to arbitrary CityGML mod-
els. But within our workflow we can directly generate
planar roof facets if we do not snap together vertices
to avoid step edges. Then instead of establishing pla-
narity, linear optimization can be used to eliminate
step edges while at the same time planarity is main-
tained. To this end, height differences
v.z+ v.h
+
−v.h
−
−u.z−u.h
+
+ u.h
−
have to be minimized for each pair of vertices u,v ∈
V with u.x = v.x, u.y = v.y, and u.z ≤ v.z, where
v.z −u.z is less than a threshold bound β for un-
wished step heights like β = 0.5 m. Please note that
constraints (3) ensure that such differences are non-
negative. For such vertices u und v, we add sum-
mands w·(v.h
+
−v.h
−
−u.h
+
+ u.h
−
) to the original
objective function
∑
p∈V
ω(p)[p.h
+
+ p.h
−
], where w
is a large weight that forces height differences to be
smaller than a given precision (if compatible with
constraints) whereas the original objective function
avoids unnecessary height changes. For example
we set w to the overall number of variables times
εmax{ω(p) : p ∈V}/(µ/2) (see Section 6 for mean-
ing of symbols). By allowing local height changes
up to ε := β, the linear program of Section 6 then
minimizes step edges with height differences below
ε. If compliant with auxiliary conditions, height dif-
ferences become smaller than precision so that step
edges vanish. Unfortunately, it turns out that in prac-
tice the optimization of step edges leads to visible roof
changes similar to the changes caused by planariza-
tion.
Starting from scratch, overall processing time for
all of Leverkusen’s 66,400 buildings on 79 square
kilometers is about four hours on two cores of an i5
processor with 4 GB of RAM. The Simplex algorithm
theoretically has an exponential worst-case running
time but turns out to be extremely fast for our small
optimization problems. With respect to worst-case
situations, it could be replaced by an interior point
method so that all processing steps run in polynomial
time.
So far, our processing workflow is data based. We
plan to extend it to a hybrid data and model driven
approach. For special structures with small footprints
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
102

Figure 16: Preserving rectangular shapes: raster represen-
tation of roof facets without and with shape estimation.
like tower spires, we are experimenting to fit objects
from a catalogue. To recognize such structures, we
will both use edges from orthophotos as well as the
interpolated height map. Since many roof facets have
rectangular or triangular shapes, we will detect and
maintain such shapes, see Figure 16 for first results.
In contrast to (Nan et al., 2010), we will not directly
fit geometric objects to the 3D point cloud but use the
2D raster representation.
ACKNOWLEDGEMENTS
We would like to thank cadastre offices of the cities
of Krefeld and Leverkusen as well as the state cadas-
tre office of North Rhine-Westphalia for support-
ing us with buildings’ footprints, laser scanning data
and true orthophotos. Especially, Johannes Schar-
mann and Marco Oestereich gave us valuable sup-
port. Cadastral data are protected by copyright
(Geobasisdaten der Kommunen und des Landes NRW
c
Geobasis NRW 2016).
REFERENCES
Alam, N., Wagner, D., Wewetzer, M., von Falkenhausen,
J., Coors, V., and Pries, M. (2013). Towards au-
tomatic validation and healing of CityGML models
for geometric and semantic consistency. ISPRS Ann.
Photogramm. Remote Sens. and Spatial Inf. Sci., II-
2/W1:1–6.
Arefi, H. and Reinartz, P. (2013). Building reconstruction
using dsm and orthorectified images. Remote Sens.,
5(4):1681–1703.
Arikan, M., Schw¨arzler, M., Fl¨ory, S., Wimmer, M., and
Maierhofer, S. (2013). O-snap: Optimization-based
snapping for modeling architecture. ACM Trans.
Graph., 32(1):6:1–6:15.
Biljecki, F., Stoter, J., Ledoux, H., Zlatanova, S., and
C¸ ¨oltekin, A. (2015). Applications of 3d city models:
State of the art review. ISPRS Int. J. Geo-Inf., 4:2842–
2889.
Boeters, R., Ohori, K. A., Biljecki, F., and Zlatanova,
S. (2015). Automatically enhancing CityGML lod2
models with a corresponding indoor geometry. In-
ternational Journal of Geographical Information Sci-
ence, 29(12):2248–2268.
Bogdahn, J. and Coors, V. (2010). Towards an automated
healing of 3d urban models. In H., K. T., G., K., and
C., N., editors, Proceedings of international confer-
ence on 3D geoinformation, International Archives of
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences, pages 13–17.
Bouaziz, S., Deuss, M., Schwartzburg, Y., Weise, T., and
Pauly, M. (2012). Shape-up: Shaping discrete ge-
ometry with projections. Computer Graphics Forum,
31(5):1657–1667.
Demir, I., Aliaga, D. G., and Benes, B. (2015). Procedural
editing of 3d building point clouds. In 2015 IEEE In-
ternational Conference on Computer Vision (ICCV),
pages 2147–2155, Washington, DC. IEEE Computer
Society.
Deng, B., Bouaziz, S., Deuss, M., Kaspar, A.,
Schwartzburg, Y., and Pauly, M. (2015). Interactive
design exploration for constrained meshes. Comput.
Aided Des., 61(C):13–23.
Elbrink, S. O. and Vosselman, G. (2009). Building recon-
struction by target based graph matching on incom-
plete laser data: analysis and limitations. Sensors,
9(8):6101–6118.
Finlayson, G. D., Hordley, S. D., and Drew, M. S. (2002).
Removing shadows from images. In Proceedings of
the 7th European Conference on Computer Vision-
Part IV, ECCV ’02, pages 823–836, Berlin. Springer.
Goebbels, S., Pohle-Fr¨ohlich, R., and Rethmann, J. (2017).
Planarization of CityGML models using a linear pro-
gram. In Operations Research Proceedings (OR 2016
Hamburg), pages 1–6, Berlin. Springer, to appear.
Goebbels, S. and Pohle-Fr¨ohlich, R. (2016). Roof recon-
struction from airborne laser scanning data based on
image processing methods. ISPRS Ann. Photogramm.
Remote Sens. and Spatial Inf. Sci., III-3:407–414.
Gr¨oger, G. and Pl¨umer, L. (2009). How to achieve con-
sistency for 3d city models. ISPRS Int. J. Geo-Inf.,
15(1):137–165.
Gr¨oger, G., Kolbe, T. H., Nagel, C., and H¨afele, K. H.
(2012). OpenGIS City Geography Markup Language
(CityGML) Encoding Standard. Version 2.0.0. Open
Geospatial Consortium.
Guo, R., Dai, Q., and Hoiem, D. (2011). Single-image
shadow detection and removal using paired regions.
In Proceedings of the 2011 IEEE Conference on Com-
puter Vision and Pattern Recognition, CVPR ’11,
pages 2033–2040, Washington, DC. IEEE Computer
Society.
Haala, N. and Kada, M. (2010). An update on automatic
3d building reconstruction. ISPRS Journal of Pho-
togrammetry and Remote Sensing, 65:570–580.
He, Y. (2015). Automated 3D Building Modeling from Air-
Quality Enhancement Techniques for Building Models Derived from Sparse Point Clouds
103

borne LiDAR Data (PhD thesis). University of Mel-
bourne, Melbourne.
Henn, A., Gr¨oger, G., Stroh, V., and Pl¨umer, L. (2013).
Model driven reconstruction of roofs from sparse LI-
DAR point clouds. ISPRS Journal of Photogrammetry
and Remote Sensing, 76:17–29.
Kada, M. and Wichmann, A. (2013). Feature-driven 3d
building modeling using planar halfspaces. ISPRS
Ann. Photogramm. Remote Sens. and Spatial Inf. Sci.,
II-3/W3:37–42.
Makhorin, A. (2009). The GNU Linear Programming Kit
(GLPK). Free Software Foundation, Boston, MA.
Mesnil, R., Douthe, C., Baverel, O., and L´eger, B. (2016).
From descriptive geometry to fabrication-aware de-
sign. In Adriaenssens, S., abd M. Kohler, F. G.,
Menges, A., and Pauly, M., editors, Advances in
Architectural Geometry, pages 62–81, Z¨urich. vdf
Hochschulverlag.
Nan, L., Sharf, A., Zhang, H., Cohen-Or, D., and Chen, B.
(2010). Smartboxes for interactive urban reconstruc-
tion. ACM Trans. Graph., 29(4):93:1–93:10.
Perera, S. N. and Maas, N. G. (2012). A topology based
approach for the generation and regularization of roof
outlines in airborne laser scanning data. In Seyfert, E.,
editor, DGPF Tagungsband 21, pages 400–409, Pots-
dam. DGPF.
SIG3D (2014). Handbuch f¨ur die Modelierung von 3D
Objekten, Teil 1: Grundlagen. Geodateninfrastruktur
Deutschland, 0.7.1 edition.
Tang, C., Sun, X., Gomes, A., Wallner, J., and Pottmann, H.
(2014). Form-finding with polyhedral meshes made
simple. ACM Trans. Graph., 33(4):70:1–70:9.
Tarsha-Kurdi, F., Landes, T., Grussenmeyer, P., and
Koehl, M. (2007). Model-driven and data-driven
approaches using LIDAR data: Analysis and com-
parison. International Archives of Photogrammetry,
Remote Sensing and Spatial Information Sciences,
36(3/W49A):87–92.
Tong, L., Li, M., Chen, Y., Wang, Y., Zhang, W., and Cheng,
L. (2012). A research on 3d reconstruction of building
rooftop models from LiDAR data and orthophoto. In
Proceedings of the 20th International Conference on
Geoinformatics (GEOINFORMATICS), Hong Kong,
pages 1–5, Washington, DC. IEEE Computer Society.
Wagner, D., Wewetzer, M., Bogdahn, J., Alam, N., Pries,
M., and Coors, V. (2013). Geometric-semantical con-
sistency validation of CityGML models. In Pouliot,
J. and et. al., editors, Progress and New Trends in
3D Geoinformation Sciences, Lecture notes in geoin-
formation and cartography, pages 171–192, Berlin.
Springer.
Wichmann, A. and Kada, M. (2016). Joint simultaneous
reconstruction of regularized building superstructures
from low-density LIDAR data using icp. ISPRS Ann.
Photogramm. Remote Sens. and Spatial Inf. Sci., III-
3:371–378.
Zhao, J., Stoter, J., and Ledoux, H. (2013). A framework for
the automatic geometric repair of CityGML models.
In Buchroithner, M., Prechtel, N., and Burghardt, D.,
editors, Cartography from Pole to Pole, Lecture Notes
in Geoinformation and Cartography, pages 187–202,
Berlin. Springer.
GRAPP 2017 - International Conference on Computer Graphics Theory and Applications
104
